
Abstract
Slender body theory is a commonly used approximation in computational models of thin fibers in viscous fluids, especially in simulating the motion of cilia or flagella in swimming microorganisms. In Mori et al. (Commun Pure Appl Math, 2018. arXiv:1807.00178), we developed a PDE framework for analyzing the error introduced by the slender body approximation for closed-loop fibers with constant radius \(\varepsilon \), and showed that the difference between our closed-loop PDE solution and the slender body approximation is bounded by an expression proportional to \(\varepsilon |\log \varepsilon |\). Here we extend the slender body PDE framework to the free endpoint setting, which is more physically relevant from a modeling standpoint but more technically demanding than the closed loop analysis. The main new difficulties arising in the free endpoint setting are defining the endpoint geometry, identifying the extent of the 1D slender body force density, and determining how the well-posedness constants depend on the non-constant fiber radius. Given a slender fiber satisfying certain geometric constraints at the filament endpoints and a one-dimensional force density satisfying an endpoint decay condition, we show a bound for the difference between the solution to the slender body PDE and the slender body approximation in the free endpoint setting. The bound is a sum of the same \(\varepsilon |\log \varepsilon |\) term appearing in the closed loop setting and an endpoint term proportional to \(\varepsilon \), where \(\varepsilon \) is now the maximum fiber radius.



Similar content being viewed by others


References
Batchelor , G.: Slender-body theory for particles of arbitrary cross-section in Stokes flow. J. Fluid Mech. 44(3), 419–440, 1970
Bishop , R.L.: There is more than one way to frame a curve. Am. Math. Mon. 82(3), 246–251, 1975
Boyer , F., Fabrie , P.: Mathematical Tools for the Study of the Incompressible Navier–Stokes Equations and Related Models, vol. 183. Springer, Berlin 2012
Chattopadhyay , S., Wu , X.-L.: The effect of long-range hydrodynamic interaction on the swimming of a single bacterium. Biophys. J . 96(5), 2023–2028, 2009
Childress , S.: Mechanics of Swimming and Flying, vol. 2. Cambridge University Press, Cambridge 1981
Chwang , A.T., Wu , T.Y.-T.: Hydromechanics of low-Reynolds-number flow, part 2: singularity method for Stokes flows. J. Fluid Mech. 67(4), 787–815, 1975
Clague , D.S., Phillips , R.J.: A numerical calculation of the hydraulic permeability of three-dimensional disordered fibrous media. Phys. Fluids9(6), 1562–1572, 1997
Cox , R.: The motion of long slender bodies in a viscous fluid, part 1: general theory. J. Fluid Mech. 44(4), 791–810, 1970
Duvaut, G., Lions, J.: Inequalities in Mechanics and Physics, A Series of Comprehensive Studies in Mathematics, Vol. 219, 1976
Galdi , G.P.: An Introduction to the Mathematical Theory of the Navier–Stokes Equations: Steady-State Problems. Springer, Berlin 2011
Götz, T.: Interactions of Fibers and Flow: Asymptotics, Theory and Numerics. Doctoral dissertation, TU Kaiserslautern, 2000
Hanasoge , S., Hesketh , P.J., Alexeev , A.: Microfluidic pumping using artificial magnetic cilia. Microsyst. Nanoeng. 4(1), 11, 2018
Hancock , G.: The self-propulsion of microscopic organisms through liquids. Proc. R. Soc. Lond. A217(1128), 96–121, 1953
Johnson , R.E.: An improved slender-body theory for Stokes flow. J. Fluid Mech. 99(02), 411–431, 1980
Kanevsky , A., Shelley , M.J., Tornberg , A.-K.: Modeling simple locomotors in Stokes flow. J. Comput. Phys. 229(4), 958–977, 2010
Keller , J.B., Rubinow , S.I.: Slender-body theory for slow viscous flow. J. Fluid Mech. 75(4), 705–714, 1976
Khaderi , S., den Toonder , J., Onck , P.: Microfluidic propulsion by the metachronal beating of magnetic artificial cilia: a numerical analysis. J. Fluid Mech. 688, 44–65, 2011
Kim , S., Arunachalam , P.: The general solution for an ellipsoid in low-Reynolds-number flow. J. Fluid Mech. 178, 535–547, 1987
Kim , S., Lee , S., Lee , J., Nelson , B.J., Zhang , L., Choi , H.: Fabrication and manipulation of ciliary microrobots with non-reciprocal magnetic actuation. Sci. Rep. 6, 30713, 2016
Li , L., Manikantan , H., Saintillan , D., Spagnolie , S.E.: The sedimentation of flexible filaments. J. Fluid Mech. 735, 705–736, 2013
Maz’ya , V.: Sobolev Spaces. Springer, Berlin 2013
Maz’ya , V.G., Poborchi , S.V.: Differentiable Functions on Bad Domains. World Scientific, Singapore 1997
Mori, Y., Ohm, L., Spirn, D.: Theoretical justification and error analysis for slender body theory. Commun. Pure Appl. Math., 2018. arXiv:1807.00178(Accepted)
Pak , O.S., Gao , W., Wang , J., Lauga , E.: High-speed propulsion of flexible nanowire motors: theory and experiments. Soft Matter7(18), 8169–8181, 2011
Peyer , K.E., Zhang , L., Nelson , B.J.: Bio-inspired magnetic swimming microrobots for biomedical applications. Nanoscale5(4), 1259–1272, 2013
Pozrikidis , C.: Boundary Integral and Singularity Methods for Linearized Viscous Flow. Cambridge University Press, Cambridge 1992
Smith , D., Gaffney , E., Blake , J.: Discrete cilia modelling with singularity distributions: application to the embryonic node and the airway surface liquid. Bull. Math. Biol. 69(5), 1477–1510, 2007
Spagnolie , S.E., Lauga , E.: Comparative hydrodynamics of bacterial polymorphism. Phys. Rev. Lett. 106(5), 058103, 2011
Tornberg , A.-K., Shelley , M.J.: Simulating the dynamics and interactions of flexible fibers in Stokes flows. J. Comput. Phys. 196(1), 8–40, 2004
Van Oosten , C.L., Bastiaansen , C.W., Broer , D.J.: Printed artificial cilia from liquid-crystal network actuators modularly driven by light. Nat. Mater. 8(8), 677, 2009
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by S. Müller
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This research was supported in part by NSF Grant DMS-1620316 and DMS-1516978, awarded to Y.M., by NSF GRF Grant 00039202 and a Torske Klubben Fellowship, awarded to L.O., and by NSF Grant DMS-1516565, awarded to D.S. The authors also thank the IMA where most of this work was performed.
Appendix
Appendix
1.1 Dependence of Well-Posedness Constants on \(\varepsilon \)
In this appendix, we prove each of the key well-posedness inequalities stated in Section 2.1, paying close attention to how each resulting constant depends on \(\varepsilon \).
First, we prove a simple centerline straightening lemma (Lemma A.1) to facilitate computations in the following sections. Using Lemma A.1, we prove the form (2.6) of the trace inequality for \({\mathcal {A}}_\varepsilon \) functions. As in the closed loop setting [23], we show that the \(L^2\) trace along the fiber blows up like \(\left|\log \varepsilon \right|^{1/2}\) as \(\varepsilon \rightarrow 0\); however, unlike in the closed loop case, we show that an additional weight is needed at the fiber endpoints to ensure that the trace does not diverge. This results in the required decay condition (1.27) for any prescribed force \(\varvec{f}\).
Next we show the existence of an extension operator for slender bodies with free, spheroidal endpoints whose symmetric gradient is bounded independent of \(\varepsilon \). As far as we know, this result is new and may be more widely useful beyond the scope of this paper. This extension operator is then used to show \(\varepsilon \)-independence for the Korn and Sobolev inequalities in \(\Omega _\varepsilon \).
Finally we verify that the pressure estimate (2.16) does not depend on \(\varepsilon \). The proof here is essentially the same as in the closed loop setting, relying only on being able to write the region \(\mathcal {O}\) (1.15) as a finite union of star-shaped domains with respect to an \(\varepsilon \)-independent ball.
1.1.1 Centerline Straightening
To facilitate the calculations in the following sections, it will be useful to define an \(\varepsilon \)-independent straightening operator within the neighborhood \(\mathcal {O}\) (1.15) about \(\Sigma _\varepsilon \), taking \(\varvec{X}\) as in Section 1.1 to a straight line. We show the following lemma.
Lemma A.1
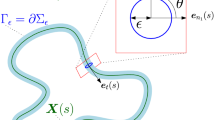
Consider a fiber centerline \(\varvec{X}(\varphi )\) as in Section 1.1 and the neighborhood \(\mathcal {O}\) given by (1.15). Within \(\mathcal {O}\), there exists a \(\mathcal {C}^1\) operator \(\Psi \) taking the moving frame basis vectors \(\varvec{e}_{\mathrm{t}}(\varphi )\), \(\varvec{e}_\rho (\varphi ,\theta )\), \(\varvec{e}_\theta (\varphi ,\theta )\) defined with respect to a Bishop frame about \(\varvec{X}_\text {ext}(\varphi )\) to straight cylindrical coordinates \(\varphi \varvec{e}_{\mathrm{t}} + \rho \varvec{e}_\rho + \theta \varvec{e}_\theta \) about a straight fiber centerline such that \(\nabla \Psi \) and \(\nabla (\Psi ^{-1})\) are both bounded independent of \(\varepsilon \).
Proof
Let \(\mathcal {O}_{\text {str}}\) denote the region \(\mathcal {O}\) with straight centerline \(\varvec{X}_{\text {ext}}\), parameterized with respect to straight cylindrical coordinates \((\varphi ,\theta ,\rho )\). Let \(\Psi _0: \mathcal {O}_{\text {str}} \rightarrow \mathcal {O}\) denote the coordinate map taking the straight cylindrical coordinates \((\varphi ,\theta ,\rho ) \mapsto \varvec{X}_\text {ext}(\varphi )+ \rho \varvec{e}_{\rho }(\varphi ,\theta )\) about the curved slender body centerline. Note that the map \(\Psi _0\) is \(\mathcal {C}^1\) due to the Bishop frame (1.3). Furthermore, \(\nabla \Psi _0\) is full rank at each point \((\varphi ,\theta ,\rho )\), which can be seen as follows. Letting \({{\overline{\varvec{e}}}}_{\mathrm{t}},{{\overline{\varvec{e}}}}_\theta ,{{\overline{\varvec{e}}}}_\rho \) denote the straight cylindrical basis vectors, for any \(\varphi _0\in (1-r_{\max },1+r_{\max })\), we can choose a rotation \(\varvec{R}\in SO(2)\) such that \(\varvec{R}\varvec{e}_{\mathrm{t}}(\varphi _0)={{\overline{\varvec{e}}}}_{\mathrm{t}}\), \(\varvec{R}\varvec{e}_\rho (\varphi _0,\theta )={{\overline{\varvec{e}}}}_\rho \), and \(\varvec{R}\varvec{e}_\theta (\varphi _0,\theta )={{\overline{\varvec{e}}}}_\theta \). Then, using (1.3),
has positive determinant, since \(\rho <r_{\max }\).
We then define the straightening operator \(\Psi \) on the \(\varvec{X}_\text {ext}\) by \(\Psi = \Psi _0^{-1}\). Note \(\Psi _0^{-1}\in \mathcal {C}^1\) by the inverse function theorem. Also, the map \(\Psi \) depends only on the shape of the fiber centerline – in particular, on the constants \(c_{\Gamma }\) and \(\kappa _{\max }\). \(\quad \square \)
Remark A.2
We can use Lemma A.1 to work locally with a straight fiber without introducing additional \(\varepsilon \)-dependence into resulting estimates.
Let \(\mathcal {O}_2\) denote the region
that is, the region \(\mathcal {O}\) with extent \(r_{\max }/2\) rather than \(r_{\max }\).
We use the following partition of unity to divide \(\Omega _\varepsilon \) in two regions:
with smooth transition between \(\mathcal {O}_2\) and \(\mathcal {O}\) for both \(\phi _1\) and \(\phi _2\). Since \(r_{\max }\) depends only on the constants \(c_{\Gamma }\) and \(\kappa _{\max }\) and not on \(\varepsilon \), these cutoffs are both independent of \(\varepsilon \). Therefore we can consider the region \(\mathcal {O}\) (where \(\phi _1\) is supported) separately from \({\mathbb {R}}^3\backslash \mathcal {O}_2\). In particular, whenever only information near the slender body surface is needed, we can use Lemma A.1 to consider only slender bodies \(\Sigma _\varepsilon \) with straight centerline. This will be useful for both the trace and extension operators constructed in the following sections, both of which rely only on information very close to \(\Gamma _\varepsilon \).
1.1.2 Trace Inequality
Here we prove the weighted trace inequality (Lemma 2.3) for functions in the space \({\mathcal {A}}_\varepsilon \). We show that the weight \((1+\left|\log (a) \right|)^{-1/2}\) is needed to avoid a logarithmic divergence in the trace at the fiber endpoints.
Proof of Lemma 2.3
It suffices to show that (2.3) holds within the region \(\mathcal {O}\). In particular, using the cutoff described in Remark A.2, we consider only functions \(\varvec{u}\) supported within a distance \(r_{\max }\leqq 1\) of the fiber centerline.
Using Lemma A.1, we proceed to show that the estimate (2.10) holds in the exterior of a straight slender body, parameterized with respect to straight cylindrical coordinates as
for \(a(\varphi )\) as in Definition 1.1. Let
We define the admissible set
Following the same outline as in the closed loop setting [23], we show that (2.10) holds for \(\varvec{u}\in \mathcal {C}^\infty _0(\overline{\Omega ^\varepsilon _\text {str}})\cap {\mathcal {A}}^\varepsilon _\text {str}\), where again the \(\overline{\Omega ^\varepsilon _\text {str}}\) notation denotes functions supported up to \(\Gamma ^\varepsilon _\text {str}\). The result for \(\varvec{u}\in {\mathcal {A}}^\varepsilon _\text {str}\) then follows by density.
Now, for \(\varvec{x}\in \Gamma ^\varepsilon _\text {str}\), we use the fundamental theorem of calculus to write \(\varvec{u}(\varvec{x})=\varvec{u}(\varepsilon a(\varphi ), \theta ,\varphi )\) as
Then we have
and therefore
Already we can see that the bound (A.3) diverges at the fiber endpoints \(\varphi =\pm \eta _\varepsilon \). This is due to the fact that as \(a(\varphi )\rightarrow 0\) at the fiber endpoints, we are trying to limit to a truly one-dimensional trace of an \(H^1\) function in \({\mathbb {R}}^3\).
To correct for this, we multiply \(\left|\mathrm{Tr}(\varvec{u}) \right|^2\) in (A.3) by \((1+\left|\log (a(\varphi )) \right|)^{-1}\). Then, since \(\varvec{u}\) belongs to \({\mathcal {A}}_\varepsilon ^{{\mathrm{div}}\,}\), using the \(\theta \)-independence of \(\mathrm{Tr}(\varvec{u})=\mathrm{Tr}(\varvec{u})(\varphi )\), we may write
Using (A.3), we then have that \(\mathrm{Tr}(\varvec{u})(\varphi )\) satisfies
where we have used that \(a\leqq 1\). \(\quad \square \)
Note that, for \(\varvec{u}\in {\mathcal {A}}_\varepsilon \), this one-dimensional \(L^2\) trace inequality along the fiber centerline relates to a (weighted) trace inequality over the entire fiber surface \(\Gamma _\varepsilon \) by
Here we have used (1.14) and (1.11) to bound \(\mathcal {J}_\varepsilon \).
1.1.3 Extension Operator for Thin Fiber with Spheroidal Endpoints
In order to determine the \(\varepsilon \)-dependence in the Korn inequality (Lemma (2.4)), as in [23], it will be convenient to show the existence of a \(D^{1,2}\) extension into the interior of \(\Sigma _\varepsilon \) whose symmetric gradient is bounded independent of \(\varepsilon \). Again, due to Lemma A.1, it suffices to show the existence of such an operator for a slender filament with straight centerline. We again parameterize the straight centerline with respect to cylindrical coordinates \((\varphi ,\theta ,\rho )\) as \(\{ (\varphi ,0,0) : -\eta _\varepsilon<\varphi <\eta _\varepsilon \}\).
Let \(\Sigma ^\varepsilon _\text {str}\) and \(\Gamma ^\varepsilon _\text {str}\) be as in (A.1) and (A.2). We define the domain \(\mathcal {W}^\varepsilon \), a “fattened” version of \(\Sigma ^\varepsilon _\text {str}\), as
and take
Note that on the bounded domain \(\mathcal {H}^\varepsilon \), the function spaces \(D^{1,2}(\mathcal {H}^\varepsilon )\) and \(H^1(\mathcal {H}^\varepsilon )\) coincide; thus it suffices to construct an \(H^1\) extension from \(\mathcal {H}^\varepsilon \) to \(\mathcal {W}^\varepsilon \) whose symmetric gradient is bounded independent of \(\varepsilon \). We show the following lemma.
Lemma A.3
(Free endpoint slender body extension) Let \(\mathcal {W}^\varepsilon \) and \(\mathcal {H}^\varepsilon \) be as in (A.4) and (A.5), respectively. For \(\varvec{u}\in H^1(\mathcal {H}^\varepsilon )\), there exists an operator \(T_\varepsilon : H^1(\mathcal {H}^\varepsilon ) \rightarrow H^1(\mathcal {W}^\varepsilon )\) extending \(\varvec{u}\) into the interior of the slender body such that
- 1.
\(T_\varepsilon \varvec{u}\big |_{\mathcal {H}^\varepsilon } = \varvec{u}\);
- 2.
\(\left||{\mathcal {E}}(T_\varepsilon \varvec{u}) \right||_{L^2(\mathcal {W}^\varepsilon )} \leqq C \left||{\mathcal {E}}(\varvec{u}) \right||_{L^2(\mathcal {H}^\varepsilon )}\), where the constant C depends on the constants \(c_a\), \({{\bar{c}}}_a\), \(a_0\), \(\delta _a\), \(c_{\eta ,0}\), and \(c_\eta \), but is independent of \(\varepsilon \).
As an immediate corollary, due to Lemma A.1, we have
Corollary A.4
(Free endpoint extension – curved centerline) Let \(\Sigma _\varepsilon \) and \(\Omega _\varepsilon \) be as in Section 1.1. For \(\varvec{u}\in D^{1,2}(\Omega _\varepsilon )\), there exists an operator \(\widetilde{T}_\varepsilon : D^{1,2}(\Omega _\varepsilon )\rightarrow D^{1,2}({\mathbb {R}}^3)\) extending \(\varvec{u}\) into the interior of the slender body \(\Sigma _\varepsilon \) such that
- 1.
\(\widetilde{T}_\varepsilon \varvec{u}\big |_{\Omega _\varepsilon } = \varvec{u}\);
- 2.
\(\left||{\mathcal {E}}(\widetilde{T}_\varepsilon \varvec{u}) \right||_{L^2(\mathcal {W}^\varepsilon )} \leqq C \left||{\mathcal {E}}(\varvec{u}) \right||_{L^2(\mathcal {H}^\varepsilon )}\), where C now depends on \(\kappa _{\max }\) and \(c_\Gamma \) in addition to \(c_a\), \({{\bar{c}}}_a\), \(a_0\), \(\delta _a\), \(c_{\eta ,0}\), and \(c_\eta \), but remains independent of \(\varepsilon \).
Proof of Lemma A.3
We subdivide the somewhat long and technical proof into 6 main steps.
Step 1: Reflection E into the interior of \(\Sigma _\text {str}^\varepsilon \)
First, for any \(\varvec{x}=\varvec{x}(\varphi ,\theta ,\rho )\in \mathcal {W}^\varepsilon \), we let
denote the distance from \(\varvec{x}\) to the straightened effective centerline (1.19). Note that since \(\mathcal {W}^\varepsilon \) is radially symmetric for each \(\varphi \), the distance \(\delta (\varphi ,\rho )\) depends only on \(\varphi \) and \(\rho \) and not on \(\theta \). In particular, we have
Now, for any \((\varphi ,\theta ,\rho )\in \mathcal {W}^\varepsilon \), define \(\varphi ^*\in (-\eta _\varepsilon ,\eta _\varepsilon )\) such that \((\varphi ^*,\theta , \varepsilon a(\varphi ^*))\) is the projection of \((\varphi ,\theta ,\rho )\) onto \(\Gamma ^\varepsilon _{\text {str}}\) along the straight line distance \(\delta (\varphi ,\rho )\) to the effective centerline. Note that for \(\left|\varphi \right|\leqq 1\), \(\varphi ^*=\varphi \). Toward the fiber endpoints, \(1<\left|\varphi \right|<\eta _\varepsilon \), we have
This means that the pair \((\varphi ^*,a(\varphi ^*))\) lies on the line connecting \((\varphi ,\rho )\) to the effective endpoint \((\pm 1,0)\). Note that as \(\rho \rightarrow 0\), \(\varphi ^*\rightarrow \pm \eta _\varepsilon \), and as \(\varphi \rightarrow 1\), \(\varphi ^*\rightarrow 1\). Also, for \(1<\left|\varphi \right|<\eta _\varepsilon \), we have
Consider \(\varvec{v}=\varvec{v}(\varphi ,\theta ,\rho )\in H^1(\mathcal {H}^\varepsilon )\) supported only at \((\varphi ,\theta ,\rho )\in \mathcal {H}^\varepsilon \) satisfying \(\delta (\varphi ,\rho ) \leqq \frac{5}{3}\delta (\varphi ^*,\varepsilon a(\varphi ^*))\) (see Fig. 4). This initial constraint on the support of \(\varvec{v}\) is important for the definition (A.8) and will be addressed for functions with more general support in Step 3. We define an extension \(E\varvec{v}\) into the interior of \(\Sigma ^\varepsilon _\text {str}\) as the reflection of \(\varvec{v}\) across \(\Gamma ^\varepsilon _\text {str}\) along the shortest straight line connecting \(\varvec{x}\) to the effective centerline segment \([-1,1]\) (See Fig. 4). More precisely,
Here \(\varphi ^*\) is as in (A.6). Note that this extension is well-defined for each \(\varvec{x}\in \Gamma _\text {str}^\varepsilon \) due to the limits on supp\((\varvec{v})\).

Consider \(\varvec{v}(\varphi ,\theta ,\rho )\in H^1(\mathcal {H}^\varepsilon )\) supported only at \((\varphi ,\theta ,\rho )\in \mathcal {H}^\varepsilon \) satisfying \(\delta (\varphi ,\rho ) \leqq \frac{5}{3}\delta (\varphi ^*,\varepsilon a(\varphi ^*))\). We construct the basic extension operator \(E: H^1(\mathcal {H^\varepsilon })\rightarrow H^1(\mathcal {W}^\varepsilon )\) by reflecting \(\varvec{v}\in H^1(\mathcal {H}^\varepsilon )\) across the straight line distance to the effective centerline of the fiber (\(-1\leqq \varphi \leqq 1\))
Step 2: Gradient estimates for E
We now aim to prove the following estimate on the (Euclidean) gradient of the reflection E within \(\Sigma _\text {str}^\varepsilon \):
Proposition A.5
Let E be as defined in (A.8). For each \(\varvec{x}=(\varphi ,\theta ,\rho )\in \Sigma _{\text {str}}^\varepsilon \), we have
Proof of Proposition A.5
For \(\varvec{x}\in \Sigma ^\varepsilon _{\text {str}}\) and \(\left|\varphi \right|\leqq 1\), we differentiate equation 2 of (A.8) to obtain
where, in the second inequality, we used that supp(\(E\varvec{v}\)) extends only to \(\rho \geqq \varepsilon a(\varphi )/3\) to bound the \(\partial /\partial \theta \) term, and Definition 1.1 to bound the \(\partial /\partial \rho \) term. Note that all functions on the right hand side in (A.10) are evaluated at \((\varphi ,\theta ,2\varepsilon a(\varphi )-\rho )\).
Similarly, for \(\varvec{x}\in \Sigma ^\varepsilon _{\text {str}}\) and \(1< \varphi <\eta _\varepsilon \), differentiating equation 3 of (A.8) and using (A.7), the gradient of the extension \(\nabla (E\varvec{v})\) satisfies
Here each function on the right hand side of (A.11) is evaluated at \((2\varphi ^*-\varphi -1,\theta ,2\varepsilon a(\varphi ^*)-\rho )\). We must now bound each of the above coefficients to obtain a bound as in (A.10). Using Definition 1.1, since \(\varphi ^*\geqq 1\) we have \(|a'(\varphi ^*)|\geqq \frac{C}{\varepsilon }\). Thus
Furthermore, using that \(\varvec{v}(\varphi ,\theta ,\rho )\) is only supported at \((\varphi ,\theta ,\rho )\in \mathcal {H}^\varepsilon \) satisfying \(\delta (\varphi ,\rho )<\frac{5}{3} \delta (\varphi ^*,\varepsilon a(\varphi ^*))\), we have that \(\nabla (E\varvec{v})\) is only supported at \((\varphi ,\theta ,\rho )\in \Sigma _{\text {str}}^\varepsilon \) satisfying
Note that this implies that for any pair \((\rho ,\varphi )\),
Also, by (A.7), we have \(\frac{\partial \varphi ^*}{\partial \rho }\leqq 0\), and therefore \(\frac{\varphi ^*-1}{\rho +(\varphi -1)}\) is largest when \(\rho =0\). Thus
Then, using (A.12), we can address the first coefficient in (A.11) as
Similarly, by (A.12) and (A.13), we can address the third coefficient in (A.11) as
Now, if \(0<(\varphi ^*-1)\leqq (\eta _\varepsilon -1)/2\), then by the spheroidal endpoint requirement of Definition 1.1, \(a(\varphi ^*) \geqq C\varepsilon \). If \((\varphi ^*-1)\geqq (\eta _\varepsilon -1)/2\), then by (1.9), \((\varphi ^*-1)\geqq C\varepsilon ^2\). Therefore
Finally, using (A.6) and (A.13), we can address the middle \(\frac{1}{\rho }\) coefficient of (A.11). We have
and therefore
Altogether, for \(\varvec{x}\in \Sigma ^\varepsilon _{\text {str}}\) and \(1< \varphi <\eta _\varepsilon \), we have that \(\nabla (E\varvec{v})\) satisfies
A similar bound holds for \(-\eta _\varepsilon< \varphi < -1\). \(\quad \square \)
Step 3: Cutoff and definition of T
To make use of the extension E for \(H^1(\mathcal {H}^\varepsilon )\) functions with arbitrary support, we must define a cutoff function \(\psi \in \mathcal {C}^1(\mathcal {H}^\varepsilon )\). In particular, we take
with smooth transition between 0 and 1, and \(\mathcal {C}^1\) transition from \(\left|\varphi \right| \leqq 1\) to the endpoint sections. Here \(\varphi ^*\) is as in (A.6).
For \(\left|\varphi \right|<1\), we require that the decay rate \(\partial \psi /\partial \rho \) is such that \(\nabla \psi \) satisfies
for \(\varepsilon \) sufficiently small. Similarly, for \(1\leqq \left|\varphi \right|<\eta _\varepsilon \), we require that \(\nabla \psi \) satisfies
where we have used Definition 1.1 and (1.9) to rewrite the bound.
We then define our preliminary extension operator \(T: H^1(\mathcal {H}^\varepsilon ) \rightarrow H^1(\mathcal {W}^\varepsilon )\) by
Note that the \(L^2\) norm of the extension satisfies
where the constant C is independent of \(\varepsilon \).
Furthermore, using (A.9), (A.16), and (A.17), the symmetric gradient \({\mathcal {E}}(T\varvec{u})\) satisfies
for C independent of \(\varepsilon \).
Step 4: Auxiliary Korn-type lemmas
Now, we would like to be able to adapt this extension operator T to satisfy Lemma A.3. However, the \(L^2(\mathcal {W}^\varepsilon )\) bound for \({\mathcal {E}}(T\varvec{u})\) is problematic (see the last term of (A.20)). To address this issue, we follow a similar construction to [22], Chapter 3, which develops an extension operator for a thin, infinite cylinder with gradient bounds independent of \(\varepsilon \), as well as [23], Section 3.2, which adapts these arguments for the symmetric gradient. The new difficulty here is the change in the radius function \(a(\varphi )\) from O(1) to 0 along the filament, as well as the introduction of endpoints.
The key to removing the \(\varepsilon \)-dependence in the estimate (A.20) will involve dividing the fiber into many small segments with length roughly equal to radius on each segment. We will then construct an extension operator that makes use of the Korn-Poincaré inequality (Lemma A.10) along with homogeneous rescaling (Corollary A.11) to get rid of the problematic last term of (A.20). This construction will involve working with a series of domains that are very similar to each other but not exactly identical. The main goal of this step is therefore to show that the Korn-Poincaré inequality (Lemma A.10) holds with a uniform constant on domains that are similar but not exactly the same. To arrive at this result, we must first prove a series of Korn-type inequalities with a uniform constant over slightly deformed domains.
To this end, for a bounded, Lipschitz domain \({\mathcal {D}}\subset {\mathbb {R}}^3\) and neighborhood \(\mathcal {N}\) of \({\mathcal {D}}\), we will work with \(\mathcal {C}^2\) maps \(\Psi : \mathcal {N}\rightarrow {\mathbb {R}}^3\) satisfying
for some \(M>0\). Note that \(\Psi ({\mathcal {D}})\) is also a bounded, Lipschitz domain.
The reason we consider Lipschitz domains rather than smoother domains is that we will be using the following results in a truncated cylinder domain; in particular, \({\mathcal {D}}\) must be allowed to have corners. However, the mappings \(\Psi \) that we consider will be \(\mathcal {C}^2\) in the sense that second derivatives of \(\Psi \) are uniformly continuous up to \(\partial {\mathcal {D}}\).
We proceed to summarize the necessary tools to show Lemma A.10. We begin by recalling the following important result from elasticity theory, which does not depend on the domain. The proof may be found in [9].
Lemma A.6
(Rigid motion) Let \({\mathcal {D}}\subset {\mathbb {R}}^3\) be any domain. If \(\varvec{u}: {\mathcal {D}}\rightarrow {\mathbb {R}}^3\) with \(\nabla \varvec{u}\in L^2({\mathcal {D}})\) satisfies \(\nabla \varvec{u}+(\nabla \varvec{u})^{\mathrm{T}}=0\), then \(\varvec{u}\) is a rigid body motion: \(\varvec{u}(\varvec{x}) = \varvec{A}\varvec{x}+{\varvec{b}}\) for some constant, antisymmetric \(\varvec{A}\in {\mathbb {R}}^{3\times 3}\) and constant \({\varvec{b}}\in {\mathbb {R}}^3\).
Now, for a bounded, Lipschitz domain \({\mathcal {D}}\), we let \({\mathcal {R}}\) denote the space of rigid motions:
For any \(\varvec{u}\in H^1({\mathcal {D}})\), we define the \(L^2\) projection \(P_{\mathcal {R}}\varvec{u}\) onto the space \({\mathcal {R}}\):
By Lemma A.6, for any \(\varvec{v}\in {\mathcal {R}}\), we have \({\mathcal {E}}(\varvec{v})=0\).
The first varying-domain result that we will need is a uniform Nečas inequality for slightly deformed domains. Here we verify just the uniformity of the constant for small domain deformations; the proof of the inequality itself can be found in [3, 9].
Lemma A.7
(Varying domain Nečas inequality). Let \({\mathcal {D}}\subset {\mathbb {R}}^3\) be a bounded, Lipschitz domain and consider any diffeomorphism \(\Psi \) as in (A.21) for fixed \(M>0\). Then for any \(\varvec{w}\in H^{-1}(\Psi ({\mathcal {D}}))\) with \(\nabla \varvec{w}\in H^{-1}(\Psi ({\mathcal {D}}))\), we in fact have \(\varvec{w}\in L^2(\Psi ({\mathcal {D}}))\) and \(\varvec{w}\) satisfies
where the constant C(M) is uniform for any \(\Psi \) satisfying (A.21).
Proof
Let \(\widetilde{\varvec{w}}=\varvec{w}\circ \Psi ^{-1}\in L^2({\mathcal {D}})\), and let \(\widetilde{C}\) denote the constant for which (A.22) holds for \(\widetilde{\varvec{w}}\). Note that for any \(\varvec{\phi }\in H^1_0({\mathcal {D}})\) with \(\left||\nabla \varvec{\phi } \right||_{L^2({\mathcal {D}})}=1\), we have
where we have defined \(\overline{\varvec{\phi }} := (\varvec{\phi }\circ \Psi ) \left|\det \nabla \Psi \right|\). Taking the supremum over all such \(\varvec{\phi }\), we obtain
Likewise,
Furthermore,
Altogether,
\(\square \)
Using Lemma A.7, we immediately obtain the following result:
Lemma A.8
(Varying domain Korn-type inequality, 1) Let \({\mathcal {D}}\subset {\mathbb {R}}^3\) be a bounded, Lipschitz domain and let \(\Psi \) be as in (A.21) for fixed \(M>0\). Then \(\varvec{v}\in H^1(\Psi ({\mathcal {D}}))\) satisfies
where the constant C(M) is uniform for any \(\Psi \) satisfying (A.21).
Proof
Define the set \(K = \{\varvec{v}\in L^2(\Psi ({\mathcal {D}})) : {\mathcal {E}}(\varvec{v})\in L^2(\Psi ({\mathcal {D}}))\}\). Then K is a Hilbert space with norm
Letting \(\varvec{x}=(x_1,x_2,x_3)\), \(\varvec{v}=(v_1,v_2,v_3)\), and \({\mathcal {E}}_{ik}(\varvec{v}) = \frac{1}{2}\big (\frac{\partial v_i}{\partial x_k} + \frac{\partial v_k}{\partial x_i}\big )\), we have that for \(\varvec{v}\in K\), \(\frac{\partial {\mathcal {E}}_{ik}(\varvec{v})}{\partial x_j} \in H^{-1}(\Psi ({\mathcal {D}}))\) for each \(1\leqq i,j,k\leqq 3\). Note that
and therefore \(\left||\nabla ^2\varvec{v} \right||_{H^{-1}(\Psi ({\mathcal {D}}))} \leqq 3 \left||\nabla \big ({\mathcal {E}}(\varvec{v})\big ) \right||_{H^{-1}(\Psi ({\mathcal {D}}))}\). Then, by Lemma A.7,
\(\square \)
We now use Lemma A.8 to show that the following pair of varying-domain Korn-type inequalities hold with a uniform constant:
Corollary A.9
(Varying domain Korn-type inequalities, 2) Consider a bounded, Lipschitz domain \(\mathcal {D}\subset {\mathbb {R}}^3\) along with any diffeomorphism \(\Psi \) satisfying (A.21) for fixed \(M>0\). Suppose \(\varvec{v}\in H^1(\Psi ({\mathcal {D}}))\) satisfies at least one of the following conditions:
- 1.
\(\varvec{v}\perp {\mathcal {R}}\), the space of rigid motions on \(\Psi ({\mathcal {D}})\), or
- 2.
\(\varvec{v}\) vanishes on an open set of \(\partial (\Psi ({\mathcal {D}}))\) containing four non-coplanar points.
Then there exists a constant \(C(M)>0\) such that \(\varvec{v}\) satisfies
Proof
We first prove case 1. Assume that (A.24) does not hold. Then there is a sequence of \(\mathcal {C}^2\)-diffeomorphisms \(\Psi _k\) and functions \(\varvec{v}_k\in H^1(\Psi _k({\mathcal {D}}))\) with \(\varvec{v}_k\perp {\mathcal {R}}\) and \(\left||\varvec{v}_k \right||_{L^2(\Psi _k({\mathcal {D}}))} =1\) satisfying
Let \(\widetilde{\varvec{v}}_k=\varvec{v}_k\circ \Psi _k^{-1} \in H^1({\mathcal {D}})\). Then
so \(\left||\widetilde{\varvec{v}}_k \right||_{L^2({\mathcal {D}})} \geqq \frac{1}{\sqrt{M}} >0\).
Using Lemma A.8, we also have
Taking k sufficiently large, we have
as \(k\rightarrow \infty \). Then, by definition of \(\widetilde{\varvec{v}}_k\) and Lemma A.8, for k sufficiently large we have
Passing to a subsequence (which we continue to denote by \(\widetilde{\varvec{v}}_k\)) and using Rellich compactness, \(\widetilde{\varvec{v}}_k\rightarrow \widetilde{\varvec{v}}_\infty \) in \(L^2({\mathcal {D}})\). Note also that by (A.21), \(\Psi _k\rightarrow \Psi _\infty \) in \(\mathcal {C}^1\).
Now, choose any rigid motion \(\varvec{A}\varvec{x}+\varvec{b} \in {\mathcal {R}}\) on \(\Psi _\infty ({\mathcal {D}})\), where \(\varvec{A}\) is a constant, antisymmetric matrix and \(\varvec{b}\) is a constant vector. Note that this is also a well-defined rigid motion on \(\Psi _k({\mathcal {D}})\) for any k. Then we have
Thus \(\varvec{v}_\infty \perp {\mathcal {R}}\) on \(\Psi _\infty ({\mathcal {D}})\). However, since \(\liminf _k\left||{\mathcal {E}}(\varvec{v}_k) \right||_{L^2(\Psi _k({\mathcal {D}}))}\geqq \left||{\mathcal {E}}(\varvec{v}_\infty ) \right||_{L^2(\Psi _\infty ({\mathcal {D}}))}\), we have \({\mathcal {E}}(\varvec{v}_\infty )=0\), and by Lemma A.6, \(\varvec{v}_\infty \in {\mathcal {R}}\). Thus \(\varvec{v}_\infty =0\), so \(\varvec{v}_k\rightarrow 0\), contradicting \(\left||\varvec{v}_k \right||_{L^2(\Psi ({\mathcal {D}}))}\geqq \frac{1}{\sqrt{M}}>0\).
To show case (2.) of Corollary A.9, we instead take \(\varvec{v}_k\in H^1(\Psi _k({\mathcal {D}}))\) vanishing on an open set of \(\partial (\Psi ({\mathcal {D}}))\) containing four non-coplanar points. The proof proceeds as above, except instead of arriving at a contradiction via (A.25), we use that each \(\widetilde{\varvec{v}}_k\) vanishes on an open set of \(\partial {\mathcal {D}}\) and thus \(\widetilde{\varvec{v}}_\infty \) does as well. Then \(\varvec{v}_\infty \) also vanishes on an open set of \(\partial (\Psi _\infty ({\mathcal {D}}))\), but \({\mathcal {E}}(\varvec{v}_\infty )=0\), and therefore \(\varvec{v}_\infty =0\). \(\quad \square \)
Finally, using Corollary A.9, we can show the following:
Lemma A.10
(Varying domain Korn-Poincaré inequality) Let \(\mathcal {D}\subset {\mathbb {R}}^3\) be a bounded, Lipschitz domain and consider any diffeomorphism \(\Psi \) satisfying (A.21) for fixed \(M>0\). Then there exists a constant \(C(M)>0\) such that any \(\varvec{v}\in H^1(\Psi ({\mathcal {D}}))\) with \(\varvec{v}\perp {\mathcal {R}}\), the space of rigid motions on \(\Psi ({\mathcal {D}})\), satisfies
Proof
Suppose that Lemma A.10 does not hold. Then there exist a sequence of diffeomorphisms \(\Psi _k\) and functions \(\varvec{v}_k\in H^1(\Psi _k({\mathcal {D}}))\) with \(\varvec{v}_k\perp {\mathcal {R}}\) and \(\left||\varvec{v}_k \right||_{L^2(\Psi _k({\mathcal {D}}))} =1\) such that
As in the proof of Corollary A.9, let \(\widetilde{\varvec{v}}_k = \varvec{v}_k\circ \Psi _k^{-1}\in H^1({\mathcal {D}})\). Then \(\left||\widetilde{\varvec{v}}_k \right||_{L^2({\mathcal {D}})} \geqq \frac{1}{\sqrt{M}} >0\). Furthermore, using Corollary A.9, we have
as \(k\rightarrow \infty \). Passing to a subsequence (which we continue to denote \(\widetilde{\varvec{v}}_k\)) and using Rellich compactness, we have that \(\widetilde{\varvec{v}}_k\rightarrow \widetilde{\varvec{v}}_\infty \) in \(L^2({\mathcal {D}})\). Also, since \(\liminf _k\left||\nabla \widetilde{\varvec{v}}_k \right||_{L^2({\mathcal {D}})} \leqq \left||\nabla \widetilde{\varvec{v}}_\infty \right||_{L^2({\mathcal {D}})}\), we have \(\nabla \widetilde{\varvec{v}}_\infty =0\), so \(\widetilde{\varvec{v}}_\infty =\varvec{b}\) for some constant vector \(\varvec{b}\).
However, using that \(\Psi _k\rightarrow \Psi _\infty \) in \(\mathcal {C}^1\), by (A.21), we have \(\varvec{v}_\infty = \widetilde{\varvec{v}}_\infty \circ \Psi _\infty = \varvec{b}\), and \(\varvec{v}_\infty \perp {\mathcal {R}}\), so \(\varvec{b}=0\). Thus \(\widetilde{\varvec{v}}_\infty =0\), which contradicts \(\left||\widetilde{\varvec{v}}_k \right||_{L^2({\mathcal {D}})} \geqq \frac{1}{\sqrt{M}} >0\). \(\quad \square \)
Lemma A.10 under homogeneous rescaling then gives rise to the following corollary:
Corollary A.11
(Korn-Poincaré rescaling) Let \(\mathcal {D}\subset {\mathbb {R}}^3\) be a bounded, Lipschitz domain and \(\Psi \) a diffeomorphism as in (A.21) for fixed \(M>0\). Consider \(\varvec{v}\in H^1(\Psi (\mathcal {D}))\) with \(\varvec{v}\perp {\mathcal {R}}\), the space of rigid motions on \(\Psi ({\mathcal {D}})\). Under homogeneous rescaling of the domain \(\Psi (\mathcal {D})\rightarrow \lambda \Psi (\mathcal {D})\), \(\lambda \in {\mathbb {R}}_+\), we have
where the constant C(M) is uniform for all \(\Psi \) satisfying (A.21).
Step 5: Decomposition of domain \(\mathcal {W}^\varepsilon \)
Now, we would like to make use of the scaling in Corollary A.11 to design an extension operator that removes the \(\varepsilon \)-dependence coming from the lower part of the norm in (A.20). To do so, we consider the slender body as the union of many tiny segments, each sufficiently small to be able to make use of the scaling in Corollary A.11. We consider the positive half of the fiber (\(\varphi \geqq 0\)) here; the negative half (\(\varphi \leqq 0\)) follows by the same arguments.
Recalling the constant \(\delta _a\) given by Definition 1.1, we partition the segment [0, 1] in the following way: we define a collection of points \(\{p_n\}\) by
Note that we continue iterating this procedure until we reach N such that \(p_{N+1}<0\). It will also be necessary to define \(p_{N+2}=p_{N+1}-\varepsilon \). We also let \(N_\delta \) denote
Using the collection of points \(\{p_n\}\), we define an open cover \(\{Q_n\}\) of the interval \((0,\eta _\varepsilon )\) as follows: for \(\varphi \in (p_{N+2},2\eta _\varepsilon -1)\), define
Using the cover \(\{Q_n\}\), we subdivide the domain \(\mathcal {W}^\varepsilon \) as (see Fig. 5)

We subdivide the domain \(\mathcal {W}^\varepsilon \) using the points \(\{p_n\}\) defined via the process in (A.28)
We also define
Now, using Definition 1.1 – in particular, the endpoint monotonicity requirement – along with (A.28), for each \(n\in [2,N_\delta ]\) we can write
where \({{\bar{c}}}_a\) and \(\delta _a\) are as defined in Section 1.1. Then the ratios \(a(p_n)/a(p_{n-1})\) and \(a(p_{n-1})/a(p_n)\) satisfy
Using the spheroidal endpoint requirement of Definition 1.1, we have that these ratios are bounded independent of \(\varepsilon \).
Furthermore, using (1.9) and Definition 1.1, we have that the ratios \((\eta _\varepsilon -1)/(\varepsilon a(1))\) and \(\varepsilon a(1)/(\eta _\varepsilon -1)\) satisfy
and are thus also bounded independent of \(\varepsilon \).
Therefore we can can define the sets \(\mathcal {W}_n^*\) as follows:
where each \(\mathcal {W}_n^*\) is contained in a cylinder of radius
and height
See Fig. 6 for a depiction of \(\mathcal {W}_n^*\) for \(2\leqq n\le N_\delta \). In particular, due to (A.33) and (A.34), the volume of each slice \(\mathcal {W}_n^*\) is bounded independent of \(\varepsilon \). By the same arguments, we can also write \(\mathcal {H}_n^\varepsilon \) (A.32) as
where the volume of each \(\mathcal {H}_n^*\) is bounded independent of \(\varepsilon \).

For \(2\leqq n \leqq N_\delta \), we may think of the domain \(\mathcal {W}_n^\varepsilon \) as \(\mathcal {W}_n^\varepsilon =\varepsilon a(p_n)\mathcal {W}_n^*\), a rescaled version of the domain \(\mathcal {W}_n^*\), the volume of which is bounded independent of \(\varepsilon \). A similar result holds on the endpoint segments \(n=0,1\) and on the segments \(N_\delta +1\leqq n\le N+1\)
Remark A.12
The domains \(\mathcal {H}^*_n\), \(1\leqq n\le N_\delta \), are each slightly different in size and shape; however, each can be deformed via a diffeomorphism satisfying (A.21) for M small to a cylinder of height 2 and radius 2 with a cylindrical hole of radius 1. For any \(1\leqq n\le N_\delta \), we may parameterize \(\mathcal {H}^*_n\) with respect to cylindrical coordinates as
Then, using (A.33), the transformation
gives the desired diffeomorphism. Note that then, by Lemma A.10, the Korn-Poincaré inequality over each of the domains \(\mathcal {H}^*_n\), \(1\leqq n\le N+1\), has a uniform constant.
The endpoint segment (\(n=0\)) must be treated separately from the above construction. Instead, using (A.34), we may deform \(\mathcal {H}^*_0\) to a hemisphere of radius 2. Since the endpoint shape implicitly depends on \(\varepsilon \) via Definition 1.1, this will provide us with a uniform Korn-Poincaré inequality (Lemma A.10) on the endpoint segment for any value of \(\varepsilon \).
We may then take the maximum of the two different Korn-Poncaré constants to serve as a uniform Korn-Poincaré constant for all segments of the fiber.
Now, for \(\varvec{u}\) defined in \(\mathcal {H}^\varepsilon \), let \(\varvec{u}_n\) denote the restriction \(\varvec{u}\big |_{\mathcal {H}_n^\varepsilon }\). On each \(\mathcal {H}^\varepsilon _n\), we consider the projection \(P_{{\mathcal {R}}}\varvec{u}_n\) onto rigid motions, and write \(P_{{\mathcal {R}}}\varvec{u}_n = \varvec{A}_n\varvec{x}+\varvec{b}_n\) for some \(\varvec{A}_n=-\varvec{A}_n^{\mathrm{T}}\in {\mathbb {R}}^{3\times 3}\) and \(\varvec{b}_n\in {\mathbb {R}}^3\). We omit the dependence of the projection \(P_{{\mathcal {R}}}\) on n and \(\varepsilon \). We take
to be the extension of \(P_{{\mathcal {R}}}\varvec{u}_n\) to all of \(\mathcal {W}_n^\varepsilon \). Note that on each \(\mathcal {W}_n^\varepsilon \), we have
Let \(\{\Phi _n \}\) be a partition of unity subordinate to the cover \(\{Q_n\}\). We require each \(\Phi _n\) to satisfy
where the constant C is independent of \(\varepsilon \). Note that due to (A.34), the bound for \(n=0,1\) is equivalent to requiring that \(\left|\nabla \Phi _n \right|\leqq C/(\eta _\varepsilon -1)\), \(n=0,1\).
Step 6: Definition of extension operator \(T_\varepsilon \)
We now define the extension operator \(T_\varepsilon : H^1(\mathcal {H}^\varepsilon ) \rightarrow H^1(\mathcal {W}^\varepsilon )\) that satisfies Lemma A.3. For \(\varvec{x}\in \Sigma ^\varepsilon _\text {str}\), we take
where the operator T is as in (A.18). Note that \(T_\varepsilon \varvec{u}\big |_{\mathcal {H}^\varepsilon } = \varvec{u}\).
It remains to estimate the symmetric gradient \({\mathcal {E}}(T_\varepsilon \varvec{u})\) of the extension (A.39). We begin by estimating \(\left||{\mathcal {E}}(\varvec{T}_1) \right||_{L^2(\mathcal {W}^\varepsilon )}\), which is simpler.
Define a finer partition \(\{\widetilde{Q}_n\}\) of the interval \((0,\eta _\varepsilon )\):
For each \(n\geqq 0\), define the slices \(\widetilde{\mathcal {W}}_n^\varepsilon \) of the fiber as follows:
Accordingly, we define \(\widetilde{\mathcal {H}}_n^\varepsilon = \widetilde{\mathcal {W}}_n^\varepsilon \cap \mathcal {H}^\varepsilon \).
Note that \(\widetilde{\mathcal {W}}_n^\varepsilon \subset \mathcal {W}_n^\varepsilon \) and \(\widetilde{\mathcal {W}}_n^\varepsilon \subset \mathcal {W}_{n+1}^\varepsilon \) for each n, and \(\Phi _n(\varphi )+\Phi _{n+1}(\varphi )=1\) on \(\widetilde{\mathcal {W}}_n^\varepsilon \). Then on each \(\widetilde{\mathcal {W}}_n^\varepsilon \), we may write
Using the bounds (A.37) and (A.38), for \(2\leqq n\le N_\delta \) we have
since \(\widetilde{\mathcal {H}}_n^\varepsilon \subset \mathcal {H}_n^\varepsilon \) and \(\widetilde{\mathcal {H}}_n^\varepsilon \subset \mathcal {H}_{n+1}^\varepsilon \). Then, using Remark A.12, by (A.36) and Lemma A.11 we have
Following the same arguments on the endpoint segments \(n=0,1\) and on segments \(n\geqq N_\delta +1\), we obtain
Squaring and summing over n, using orthogonality from the nearly-disjoint supports of each \(\varvec{u}_n\) along with (A.33), we thus have
for C independent of \(\varepsilon \).
Next we estimate \(\varvec{T}_2\). Using (A.38), we have
Now, using (A.19) along with Remark A.12, the scaling (A.36), and Corollary A.11, we have
Furthermore, noting that \({\mathcal {E}}(\varvec{u}_n-P_{\mathcal {R}}\varvec{u}_n) = \varvec{u}_n\) and using (A.20), we have
where \(a_0\) is as in Definition 1.1.
Now, due to the cutoff function \(\psi \), we have that \(\psi \varvec{u}_n-\psi P_{{\mathcal {R}}}\varvec{u}_n\) vanishes for \(\delta (\varphi ,\rho )> \frac{5}{3}\delta (\varphi ^*,\varepsilon a(\varphi ^*))\), and thus by Corollary A.9, case (2.), we obtain
Then, using Remark A.12, the scaling (A.36), and Corollary A.11, we have
Using the estimates (A.44) and (A.45) in (A.43), and again using orthogonality from the nearly-disjoint supports of each \(\varvec{u}_n\), we have
where, by the ratio bounds (A.33) and (A.34), C is independent of \(\varepsilon \). Combining (A.42) and (A.46), we obtain the \(\varepsilon \)-independent estimate (2.) of Lemma A.3. \(\quad \square \)
1.1.4 Korn and Sobolev Inequalities
Using the extension operator guaranteed by Corollary A.4, we can easily show that the Korn and Sobolev inequalities (Lemmas 2.4 and 2.2, respectively) hold in \(\Omega _\varepsilon \) with constants that are independent of \(\varepsilon \).
Proof of Lemma 2.4
Recall that for any \(\varvec{v}\in D^{1,2}({\mathbb {R}}^3)\), the Korn inequality over all of \({\mathbb {R}}^3\) holds with constant \(c_K=\sqrt{2}\):
Here we have used integration by parts twice on the second integral term.
Then, using the extension operator \(\widetilde{T}_\varepsilon \) from Corollary A.4, we have
\(\square \)
Similarly, we can use the extension operator \(\widetilde{T}_\varepsilon \) to show that the Sobolev inequality (2.2) holds in \(\Omega _\varepsilon \) with a constant independent of \(\varepsilon \).
Proof of Lemma 2.2
First note that, using the Korn inequality on \({\mathbb {R}}^3\), the extension \(\widetilde{T}_\varepsilon \) from Corollary A.4 satisfies
We then have
where \(c_R\) is the Sobolev constant over all of \({\mathbb {R}}^3\). Since \(c_R\) is a universal constant independent of the slender body geometry, we do not note its dependence in the statement of Lemma 2.2 or elsewhere where the Sobolev inequality is used. \(\quad \square \)
1.1.5 Pressure Estimate
In this section we prove Lemma 2.5 detailing the \(\varepsilon \)-independence of the pressure constant \(c_P\). The proof is essentially the same as in the closed loop setting [23], but we recap the arguments here to make note of slight differences due to the free endpoint geometry.
Proof of Lemma 2.5
Consider the region \(\mathcal {O}\) (1.15) of the slender body. Recall that by [10], Theorem III.3.1, given \(P\in L^2(\mathcal {O})\), there exists \(\varvec{B}\in H^1_0(\mathcal {O})\) satisfying
where the constant \(c_B\) has a useful explicit representation provided that \(\mathcal {O}\) can be written as a finite union of star-shaped domains.
We verify that the region \(\mathcal {O}\) can indeed be written as a finite union of domains star-shaped with respect to balls of uniform radius. Note that by construction, since \(\varepsilon a \leqq \varepsilon \leqq \frac{r_{\max }}{4}\) and the fiber is non-self-intersecting (1.2), the region \(\mathcal {O}\) satisfies a uniform interior sphere condition with radius \(r_{\max }/2\). In particular, we can consider \(\mathcal {O}\) as the infinite union of balls of radius \(r_{\max }/2\).
As in [23], we can follow the construction in Lemma 2, Chapter 1.1.9 of [21] to show that this uniform sphere condition implies that
where each \(\mathcal {O}_k\) is star-shaped with respect to balls of radius \(r_{\max }/2\) and N depends only on \(\kappa _{\max }\) and \(c_\Gamma \). Then, according to [10], equation III.3.27, the constant \(c_B\) in (A.47) satisfies
where \(\delta ({\mathcal {O}})\) is the diameter of \({\mathcal {O}}\) and \(c_0\) depends on the diameters of each \({\mathcal {O}}_k\), which are bounded independent of \(\varepsilon \). Using this form of \(c_B\), the \(\varepsilon \)-independence of the constant \(c_P\) follows by exactly the same construction as in the closed loop case (see [23], Appendix A.2.5), which we do not repeat here. \(\quad \square \)
Rights and permissions
About this article

Cite this article
Mori, Y., Ohm, L. & Spirn, D. Theoretical Justification and Error Analysis for Slender Body Theory with Free Ends. Arch Rational Mech Anal 235, 1905–1978 (2020). https://doi.org/10.1007/s00205-019-01458-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00205-019-01458-6