
Abstract
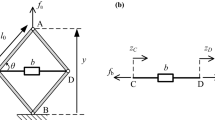
This paper investigates a nonlinear inertance mechanism (NIM) for vibration mitigation and evaluates the performance of nonlinear vibration isolators employing such mechanism. The NIM comprises a pair of oblique inerters with one common hinged terminal and the other terminals fixed. The addition of the NIM to a linear spring-damper isolator and to nonlinear quasi-zero-stiffness (QZS) isolators is considered. The harmonic balance method is used to derive the steady-state frequency response relationship and force transmissibility of the isolators subjected to harmonic force excitations. Different performance indices associated with the dynamic displacement response and force transmissibility are employed to evaluate the performance of the resulting isolators. It is found that the frequency response curve of the inerter-based nonlinear isolation system with the NIM and a linear stiffness bends towards the low-frequency range, similar to the characteristics of the Duffing oscillator with softening stiffness. It is shown that the addition of NIM to a QZS isolator enhances vibration isolation performance by providing a wider frequency band of low amplitude response and force transmissibility. These findings provide a better understanding of the functionality of the NIM and assist in better designs of nonlinear passive vibration mitigation systems with inerters.











Similar content being viewed by others

References
Rivin, E.I.: Passive Vibration Isolation. ASME Press, New York (2003)
Yang, J., Xiong, Y.P., Xing, J.T.: Dynamics and power flow behaviour of a nonlinear vibration isolation system with a negative stiffness mechanism. J. Sound Vib. 332, 167–183 (2013)
Ibrahim, R.A.: Recent advances in nonlinear passive vibration isolators. J. Sound Vib. 314, 371–452 (2008)
Smith, M.C.: Synthesis of mechanical networks: the inerter. IEEE T. Autom. Contr. 47(10), 1648–1662 (2002)
Smith, M.C., Wang, F.C.: Performance benefits in passive vehicle suspensions employing inerters. Veh. Syst. Dyn. 42(4), 235–257 (2004)
Wang, F.C., Liao, M.K., Liao, B.H., Sue, W.J., Chan, H.A.: The performance improvements of train suspension systems with mechanical networks employing inerters. Veh. Syst. Dyn. 47(7), 805–830 (2009)
Jiang, J.Z., Matamoros-Sanchez, A.Z., Goodall, R.M., Smith, M.C.: Passive suspensions incorporating inerters for railway vehicles. Veh. Syst. Dyn. 50(Suppl. 1), 263–276 (2012)
Wang, F.C., Hong, M.F., Chen, C.W.: Building suspensions with inerters. P. I. Mech. Eng. C-J. Mec. 224(8), 1605–1616 (2010)
Lazar, I.F., Neild, S.A., Wagg, D.J.: Using an inerter-based device for structural vibration suppression. Earthq. Eng. Struct. D. 43, 1129–1147 (2014)
Zhang, S.Y., Jiang, J.Z., Neild, S.A.: Optimal configurations for a linear vibration suppression device in a multi-storey building. Struc. Control Hlth. 24, 1887 (2017). https://doi.org/10.1002/stc.1887
Li, Y., Jiang, J.Z., Neild, S.A.: Inerter-based configurations for main-landing-gear shimmy suppression. J. Aircr. 54(2), 684–693 (2017)
Bott, R., Duffin, R.J.: Impedance synthesis without use of transformers. J. Appl. Phys. 20, 816 (1949)
Jiang, J.Z., Smith, M.C.: Regular positive-real functions and five-element network synthesis for electrical and mechanical networks. IEEE T. Automat. Contr. 56(6), 1275–1290 (2011)
Zhang, S.Y., Jiang, J.Z., Wang, H.L., Neild, S.A.: Synthesis of essential-regular bicubic impedances. Int. J. Circ. Theor. App. 45(11), 1482–1496 (2017)
Carrella, A., Brennan, M.J., Waters, T.P.: Static analysis of a passive vibration isolator with quasi-zero-stiffness characteristic. J. Sound Vib. 301, 678–689 (2007)
Wang, Y., Li, S., Neild, S.A., Jiang, J.Z.: Comparison of the dynamic performance of nonlinear one and two degree-of-freedom vibration isolators with quasi-zero stiffness. Nonlinear Dyn. 88(1), 635–654 (2017)
Moraes, F.H., Silveira, M., Paupitz Gonclaves, P.J.: On the dynamics of a vibration isolator with geometrically nonlinear inerter. Nonlinear Dyn. 93, 1325–1340 (2018)
Goyder, H.G.D., White, R.G.: Vibrational power flow from machines into built-up structures. J. Sound Vib. 68, 59–117 (1980)
Xiong, Y.P., Xing, J.T., Price, W.G.: A general linear mathematical model of power flow analysis and control for integrated structure-control systems. J. Sound Vib. 267, 301–334 (2003)
Yang, J.: Force transmissibility and vibration power flow behaviour of inerter-based vibration isolators. J. Phys. Conf. Ser. 744, 012234 (2016)
Yang, J., Jiang, J.Z., Zhu, X., Chen, H.: Performance of a dual-stage inerter-based vibration isolator. Proc. Eng. 199, 1822–1827 (2017)
Yang, J., Xiong, Y.P., Xing, J.T.: Nonlinear power flow analysis of the Duffing oscillator. Mech. Syst. Signal Pr. 45(2), 563–578 (2014)
Yang, J., Shi, B.Y., Rudd, C.: On vibration transmission between interactive oscillators with nonlinear coupling interface. Int. J. Mech. Sci. 137, 238–251 (2018)
Shi, B.Y., Yang, J., Rudd, C.: On vibration transmission in oscillating systems incorporating bilinear stiffness and damping. Int. J. Mech. Sci. 150, 458–470 (2019)
Yang, J., Xiong, Y.P., Xing, J.T.: Vibration power flow and force transmission behaviour of a nonlinear isolator mounted on a nonlinear base. Int J. Mech Sci. 115–116, 238–252 (2016)
Yang, J., Xiong, Y.P., Xing, J.T.: Power flow behaviour and dynamic performance of a nonlinear vibration absorber coupled to a nonlinear oscillator. Nonlinear Dyn. 80(3), 1063–1079 (2015)
Nayfeh, A.H., Mook, D.T.: Nonlinear Oscillations. Willey, New York (1979)
Wagg, D.J., Neild, S.A.: Nonlinear Vibration with Control. Springer, New York (2009)
Cammarano, A., Hill, T.L., Neild, S.A., Wagg, D.J.: Identification of systems containing nonlinear stiffnesses using backbone curves. Nonlinear Dyn. 77, 311–320 (2014)
Londono, J., Cooper, J.E., Neild, S.A.: Identification of systems containing nonlinear stiffnesses using backbone curves. Mech. Syst. Signal Pr. 84, 116–135 (2017)
Xiong, Y.P., Xing, J.T., Price, W.G.: Interactive power flow characteristics of an integrated equipment-nonlinear isolator-travelling flexible ship excited by sea waves. J. Sound Vib. 287, 245–276 (2005)
Acknowledgements
This work was supported by National Natural Science Foundation of China (Grant number 51605233) and by Ningbo Science and Technology Bureau under Natural Science Programme (Grant number 2019A610155).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Vibration power flow analysis
Appendix: Vibration power flow analysis
The non-dimensional power flow balance equations of the systems shown by Fig. 3d and c are obtained by multiplying by non-dimensional velocity \(X'\) on both sides of the original governing equations (6a) and (6b):
Thus, for the vibration isolation systems shown in Fig. 3, the non-dimensional instantaneous time-averaged input power by the external excitation force and the dissipated power by the damper in the isolator are expressed by the products of the forces and the corresponding velocities:
respectively. Interested readers may refer to ref. [18] for the basic concept and definition of vibration power flow as well as its application to dynamic analysis of linear and nonlinear vibration suppression systems as in Refs. [2, 19, 20, 22, 25, 26]. In the steady-state motion, the non-dimensional time-averaged input and dissipated powers over one period of the external excitation are
respectively, where \(\tau _0\) is the starting time while T is the averaging time, set to be a period of excitation, i.e. \(T=2\pi /\varOmega \), and a first-order approximation of the velocity with \(X'=-r\varOmega \sin (\varOmega \tau +\phi )\) was used for the inerter-based nonlinear isolation system shown in Fig. 3c. Note that based on Eqs. (16b) and (43a), the first-order approximation of the time-averaged input power into the system shown in Fig. 3c is
Note that it has been shown that Eq. (44) presents the exact analytical expression of the time-averaged input power into the inerter-based linear isolator [20]. Equations (43b) and (44) show that the first-order approximate expressions for the time-averaged input and dissipated powers are identical. This is due to the fact that over a cycle of steady-state periodic oscillation, there is no net change in potential and kinetic energies of the integrated nonlinear isolation system. Consequently, the vibration power input from the external excitation is all dissipated by damping.
The maximum kinetic energy of the excited system is widely used as a performance index of vibration control systems [19]. The non-dimensional maximum kinetic energy of the mass in the steady-state motion is
where a first-order approximation the steady-state velocity response was used for the inerter-based nonlinear isolator shown in Fig. 3. Note that a comparison of Eqs. (44) and (45) shows that
Equation (46) shows that for the system with a predetermined damping coefficient \(\zeta \), the time-averaged input power is proportional to the maximum kinetic energy of the harmonically excited mass.
With reference to the frequency response relationship expressed by Eq. (17), the time-averaged input power and the maximum kinetic energy of the mass for the system shown in Fig. 3c can be rewritten as:
These equations show that there are upper limits for both the time-averaged input power and the maximum kinetic energy of the mass, respectively. The upper limits are only determined by the damping coefficient \(\zeta \) and the excitation force amplitude \(F_e\). These upper limits of the time-averaged power flow and the maximum kinetic energy of the mass may be reached when
Recalling the backbone curve expression in Eq. (21) and frequency response relationship in (17), it is found that the upper limits of input power and kinetic energy of the mass are reached at the intersection point of the backbone curve and the displacement response curve.
Rights and permissions
About this article

Cite this article
Yang, J., Jiang, J.Z. & Neild, S.A. Dynamic analysis and performance evaluation of nonlinear inerter-based vibration isolators. Nonlinear Dyn 99, 1823–1839 (2020). https://doi.org/10.1007/s11071-019-05391-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-019-05391-x