
Abstract
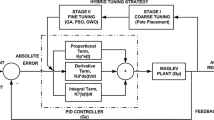
Magnetic Levitation system is an unstable and sensitive system. High precision force balance condition is required to levitate an object in the air. Accurate mathematical modeling, transfer function derivation, linearization and appropriate choice of the controller parameters play an instrumental role in the successful levitation of the object. Selection of the boundary limits for parameter variation of a controller is difficult as linearization conditions impose limitations on the upper and lower bounds. Pole Placement technique has been found to be effective in calculating the parameters of the controller as it takes the closed loop system dynamics into account. In this paper, the poles have been placed at a number of different locations to experimentally analyze the responses to find the threshold limits for successful levitation of the ball in the real time environment.














Similar content being viewed by others

References
Jones W (1980) Earnshaw’s theorem and the stability of matter. Eur J Phys 1:85–88 (printed in Northern Ireland)
Yaghoubi H (2013) The most important Maglev applications. J Eng, Article ID 537986
Wong TH (1986) Design of a magnetic levitation control system—an undergraduate project. IEEE Trans Educ 29(4):196–200
Li Y, Ang KH, Chong GCY (2006) PID control system analysis and design. IEEE Control Syst Mag 26(1):32–41
Astrom KJ, Hagglund T (1995) PID controllers: theory, design and tuning. Instrument Society of America, Pittsburgh
Gopal M (2011) Digital control and state variable method. Tata McGraw Hill, NJ
Ogata K (1997) Modern control engineering. PHI Learning Private Ltd, Englewood Cliffs
Valasek M, Olgac N (1995) Efficient pole placement technique for linear time-variant SlSO systems. IEEE Proc Control Theory Appl 142(5):451–458
Sujitjorn S, Wiboonjaroen W (2011) State-PID feedback for pole placement of LTI systems. Math Probl Eng 2011:929430
Dukaa A-V, Dulau M et al (2016) IMC based PID control of a magnetic levitation system. Proc Technol 22:592–599
Levitation Magnetic (2011) Control experiments. Feedback Instruments Limited, London
Hajjaji AE, Ouladsine M (2001) Modeling and nonlinear control of magnetic levitation systems. IEEE Trans Industr Electron 48(4):831–838
Chowdhury A, Golob M et al (2003) Robust controller design for position control of the metal ball in magnetic field. In: IEEE international conference on industrial technology
Nayak A, Subudhi B (2016). Discrete back stepping control of magnetic levitation system with a nonlinear state estimator. In: IEEE annual india conference (INDICON)
Wang L, Freeman C, Rogers E (2017) Experimental evaluation of automatic tuning of PID controllers for an electro-mechanical system. IFAC Pap Line 50(1):3063–3068
Ghosh A, Krishnan TR et al (2014) Design and implementation of a 2-DOF PID compensation for magnetic levitation systems. ISA Trans 53(4):1216–1222
Hamed A, Shaban EM et al (2017) Design and implementation of discrete PID control applied to Bitumen tank based on new approach of pole placement technique. Int J Dyn Control 5:604–613
Acknowledgements
The authors are thankful to the management of BIT Mesra for providing a research friendly atmosphere.
Funding
The authors have not received any financial grants.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Kishore, S., Laxmi, V. Modeling, analysis and experimental evaluation of boundary threshold limits for Maglev system. Int. J. Dynam. Control 8, 707–716 (2020). https://doi.org/10.1007/s40435-020-00619-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-020-00619-w