
Abstract
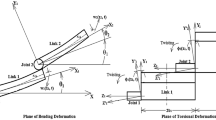
Analysis and experimentation is described for a two-link apparatus in which both members are very flexible. Attention is focused on endpoint position control for point-to-point movements, assuming a fixed reference frame for the base, with two rotary joints. Each link is instrumented with acceleration sensing and is driven by a separate motor equipped with velocity and position sensing. The control perspective adopted is to implement a two-stage control strategy in which the vibration control problem for fine-motion endpoint positioning is considered separate from the gross-motion, large-angle slew problem. In the first stage the control law shapes the actuator inputsfor the large-angle movement in such a way that minimal energy is injected into the flexible modes, while in the second phase an endpoint acceleration feedback scheme is employed in independent joint controlfor vibration suppression at the link endpoints.
Similar content being viewed by others

References
S. Yurkovich and F.E. Pacheco, “On controller tuning for a flexible-link manipulator with varying payload,”J. Robot. Syst., vol. 6, no. 3, pp. 233–254, June 1989.
S. Yurkovich, F.E. Pacheco, and A.P. Tzes, “On-line frequency domain information for control of a flexiblelink robot with varying payload,”IEEE Trans. Automat. Control, vol. AC-33, No. 12, pp. 1300–1303, 1989.
S. Yurkovich and A.P. Tzes, “Experiments in the identification and control of flexible-link manipulators,”IEEE Control Syst., vol. 10, no. 2, pp. 41–47, 1990.
A. Tzes and S. Yurkovich, “Application and comparison of on-line identification methods for flexible manipulator control,”Int. J. Robot. Re., vol. 10, no. 5, pp. 515–527, 1991.
D.M. Rovner and R.C. Cannon, “Experiments toward on-line identification and control of a very flexible one-link manipulator,”Int. J. Robot. Re., vol. 6, no. 4, pp. 3–19, 1987.
D.M. Rovner and G.F. Franklin, “Experiments in load-adaptive control of a very flexible one-link manipulator,”Automatica, vol. 24, no. 4, pp. 541–548, 1988.
E. Schmitz, “Modeling and control of a planar manipulator with an elastic foream,” inProc. IEEE Int. Conf. Robot. Automat., pp. 894–899, Scottsdale, AR, May 1989.
C.M. Oakley and R.C. Cannon “End-point control of a two-link manipulator with a very flexible forearm: Issues and experiments,” inProc. Am. Control Conf., pp. 1381–1388, Pittsburgh, PA, June 1989.
V. Feliu, K.S. Rattan, and H.B. Brown, “Adaptive control of a single-link flexible manipulator in the presence of joint friction and load changes,” inProc. IEEE Int. Conf. Robot. Automat., pp. 1036–1041, Scottsdale, AR, May 1989.
H. Krishnan and M. Vidyasagar, “Control of a single-link flexible beam using a Hankel-norm-based reduced order model,” inProc. IEEE Int. Conf. Robot. Automat., pp. 9–14, Philadelphia, PA, April 1988.
S. Yurkovich, A.P. Tzes, I. Lee, and K.L. Hillsley, “Control and system identification of a two-link flexible manipulator,” inProc. IEEE Int. Conf. Robot. Automat., pp. 1626–1631, Cincinnati, OH, May 1990.
S. Yurkovich, A.P. Tzes, and K.L. Hillsley, “Controlling coupled flexible links rotating in the horizontal plane,” inProc. Am. Control Conf., pp. 362–367, San Diego, CA, June 1990.
P. Mechkl and W. Seering, “Feedforward control techniques to achieve fast settling time in robots,” inProc. Am. Control Conf., Seattle, June 1986.
N.C. Singer and W.P. Seering, “Preshaping command inputs to reduce system vibration,” Technical Report A.I. Memo No. 1027, MIT Artificial Intelligence Laboratory, Cambridge, MA, 1988.
N.C. Singer and W.P. Seering, “Using acausal shaping techniques to reduce robot vibrations,” inProc. IEEE Int. Conf. Robot. Automat., pp. 1434–1439, Philadelphia, PA, April 1988.
N.C. Singer and W.P. Seering, “Preshaping command inputs to reduce system vibration,”Trans. ASME J. Dyn. Meas. Control, vol. 112, no. 1, pp. 76–82, 1990.
A. Tzes, M. Englehart, and S. Yurkovich, “Input preshaping with frequency domain information for flexiblelink manipulator control,” inProc. AIAA Guidance, Navigation Control Conf., Boston, MA, August 1989.
A. Tzes and S. Yurkovich, “An adaptive input shaping control scheme for vibration suppression in slewing flexible structures,”IEEE Trans. Control Sys. Tech., vol. 1, no. 2, June 1993.
P. Kotnik, S. Yurkovich, and U. Özgüner, “Acceleration feedback for control of a flexible manipulator arm,”J. Robot. Syst., vol. 5, no. 3, pp. 181–196, 1988.
A. Tzes and S. Yurkovich, “Flexible link manipulator force control,” inProc. Am. Control Conf., pp. 194–199, San Diego, CA, 1990.
S. Yurkovich, A.P. Tzes, and K.L. Hillsley, “Identification and control for a manipulator with two flexible links,” inProc. IEEE Conf. Decision Control Honolulu, HI, December 1990.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Hillsley, K.L., Yurkovich, S. Vibration control of a two-link flexible robot arm. Dynamics and Control 3, 261–280 (1993). https://doi.org/10.1007/BF01972699
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/BF01972699