
Abstract
Background
Robotic laparoscopic surgery has revolutionized minimally invasive surgery for the treatment of abdominal pathologies. However, current training techniques rely on subjective evaluation. The authors sought to identify objective measures of robotic surgical performance by comparing novices and experts during three training tasks.
Methods
Five novices (medical students) were trained in three tasks with the da Vinci Surgical System. Five experts trained in advanced laparoscopy also performed the three tasks. Time to task completion (TTC), total distance traveled (D), speed (S), curvature (κ), and relative phase (Φ) were measured.
Results
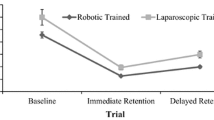
Before training, TTC, D, and κ were significantly smaller for experts than for novices (p < 0.05), whereas S was significantly larger for experts than for novices before training (p < 0.05). Novices performed significantly better after training, as shown by smaller TTC, D, and κ, and larger S. Novice performance after training approached expert performance.
Conclusion
This study clearly demonstrated the ability of objective kinematic measures to distinguish between novice and expert performance and training effects in the performance of robotic surgical training tasks.






Similar content being viewed by others


References
Talamini MA, Stanfield CL, Chang DC, Wu AW (2004) The surgical recovery index. Surg Endosc 18:596–600
Gutt CN, Oniu T, Schemmer P, Mehrabi A, Buchler MW (2004) Fewer adhesions induced by laparoscopic surgery? Surg Endosc 18:898–906
Korolija D, Sauerland S, Wood-Dauphinee S, Abbou CC, Eypasch E, Garcia Caballero M, Lumsden MA, Millat B, Monson JRT, Nilsson G, Pointner R, Schwenk W, Shamiyeh A, Szold A, Targarona E, Ure B, Neugebauer E (2004) Evaluation of quality of life after laparoscopic surgery. Surg Endosc 18:879–897
McClure N, Gallagher AG, McGuigan J, Ritchie K, Sheehy NP (1997) An ergonomic analysis of the fulcrum effect in endoscopic skill acquisition. Gynaecol Endosc 6:90
Berguer R, Smith WD, Chung YH (2001) Performing laparoscopic surgery is significantly more stressful for the surgeon than open surgery. Surg Endosc 15:1204–1207
Berguer R, Rab GT, Abu-Ghaida H, Alarcon A, Chung J (1997) A comparison of surgeons’ posture during laparoscopic and open surgical procedures. Surg Endosc 11:139–142
D’Annibale AMD, Fiscon VMD, Trevisan PMD, Pozzobon MMD, Gianfreda VMD, Sovernigo GMD, Morpurgo EMD, Orsini CMD, Del Monte DMD (2004) The da Vinci robot in right adrenalectomy: considerations on technique. Surg Laparosc Endosc Percutan Tech 14:38–41
Munz Y, Moorthy K, Dosis A, Hernandez JD, Bann SD, Bello F, Martin S, Darzi A, Rockall T (2004) The benefits of stereoscopic vision in robotic-assisted performance on bench models. Surg Endosc 18:611–616
Hernandez JD, Bann SD, Munz Y, Moorthy K, Datta V, Martin S, Dosis A, Bello F, Darzi A, Rockall T (2004) Qualitative and quantitative analysis of the learning curve of a simulated surgical task on the da Vinci system. Surg Endosc 18:372–378
Chang L, Satava RM, Pellegrini CA, Sinanan MN (2003) Robotic surgery: identifying the learning curve through objective measurement of skill. Surg Endosc 17:1744–1748
Jacobsen G, Elli F, Horgan S (2004) Robotic surgery update. Surg Endosc 18:1186–1191
Bann SD, Khan MS, Hernandez J, Munz Y, Moorthy K, Datta V, Rockall T, Darzi A (2003) Robotics in surgery. J Am Coll Surg 196:784–795
Smillie MF (2003) Intuitive surgical. The Seidler Companies, Inc., Los Angeles, CA
Hashizume M, Shimada M, Tomikawa M, Ikeda Y, Takahashi I, Abe R, Koga F, Gotoh N, Konish K, Maehara S, Sugimachi K (2002) Early experiences of endoscopic procedures in general surgery assisted by a computer-enhanced surgical system. Surg Endosc 16:1187–1191
Hubens G, Coveliers H, Balliu L, Ruppert M, Vaneerdeweg W (2003) A performance study comparing manual and robotic assisted laparoscopic surgery using the da Vinci system. Surg Endosc 17:1595–1599
Prasad SM, Maniar HS, Soper NJ, Damiano RJ, Klingensmith ME (2002) The effect of robotic assistance on learning curves for basic laparoscopic skills. Am J Surg 183:702–707
Sarle R, Tewari A, Shrivastava A, Peabody J, Menon M (2004) Surgical robotics and laparoscopic training drills. J Endourol 18:63–67
Rose DJ (1997) A multilevel approach to the study of motor control and learning. Allyn & Bacon, Needham Heights, MA
Narazaki K, Oleynikov D, Stergiou N (2006) Robotic surgery training and performance: identifying objective variables for quantifying the extent of proficiency. Surg Endosc 20:96–103
Narazaki K, Oleynikov D, Stergiou N (2007) Objective assessment of proficiency with bimanual inanimate tasks in robotic laparoscopy. J Laparoendosc Adv Surg Tech 17:47–52
Judkins TN, Oleynikov D, Stergiou N (2005) Real-time augmented feedback benefits robotic laparoscopic training. Stud Health Technol Inform 119:243–248
Craig JJ (1989) Introduction to robotics: mechanics and control. Addison-Wesley Longman Publishing Co., Inc., Reading, MA
Gray A (1997) Modern differential geometry of curves and surfaces with mathematica. CRC Press LLC, Boca Raton, FL
Weisstein EW (2006) Curvature. Retrieved August 2006 at http://mathworld.wolfram.com/Curvature.html. Mathworld–a Web resource
Campbell MJ, Gardner MJ (1988) Calculating confidence intervals for some nonparametric analyses. BMJ 296:1454–1456
Stergiou N (2004) Innovative analyses of human movement. Human Kinetics, Champaign, IL
Yohannes P, Rotariu P, Pinto P, Smith AD, Lee BR (2002) Comparison of robotic versus laparoscopic skill: is there a difference in the learning curve? Urology 60:39–45
DeUgarte DA, Etzioni DA, Gracia C, Atkinson JB (2003) Robotic surgery and resident training. Surg Endosc 17:960–963
Kurz MJ, Stergiou N (2002) Effect of normalization and phase angle calculations on continuous relative phase. J Biomech 35:369–374
Barela JA, Whitall J, Black P, Clark JE (2000) An examination of constraints affecting the intralimb coordination of hemiparetic gait. Hum Movement Sci 19:251–273
Smith CD, Farrell TM, McNatt SS, Metreveli RE (2001) Assessing laparoscopic manipulative skills. Am J Surg 181:547–550
Moorthy K, Munz Y, Dosis A, Hernandez J, Martin S, Bello F, Rockall T, Darzi A (2004) Dexterity enhancement with robotic surgery. Surg Endosc 18:790–795
Acknowledgments
This study was supported by NIH (K25HD047194), NIDRR (H133G040118), and the Nebraska Research Initiative.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Judkins, T.N., Oleynikov, D. & Stergiou, N. Objective evaluation of expert and novice performance during robotic surgical training tasks. Surg Endosc 23, 590–597 (2009). https://doi.org/10.1007/s00464-008-9933-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-008-9933-9