
Abstract
Background
The current trend in surgery toward further trauma reduction inevitably leads to increased technological complexity. It must be assumed that this situation will not stay under the sole control of surgeons; mechanical systems will assist them. Certain segments of the work flow will likely have to be taken over by a machine in an automatized or autonomous mode.
Methods
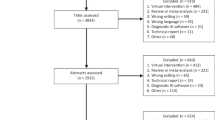
In addition to the analysis of our own surgical practice, a literature search of the Medline database was performed to identify important aspects, methods, and technologies for increased operating room (OR) autonomy.
Results
Robotic surgical systems can help to increase OR autonomy by camera control, application of intelligent instruments, and even accomplishment of automated surgical procedures. However, the important step from simple task execution to autonomous decision making is difficult to realize. Another important aspect is the adaption of the general technical OR environment. This includes adaptive OR setting and context-adaptive interfaces, automated tool arrangement, and optimal visualization. Finally, integration of peri- and intraoperative data consisting of electronic patient record, OR documentation and logistics, medical imaging, and patient surveillance data could increase autonomy.
Conclusions
To gain autonomy in the OR, a variety of assistance systems and methodologies need to be incorporated that endorse the surgeon autonomously as a first step toward the vision of cognitive surgery. Thus, we require establishment of model-based surgery and integration of procedural tasks. Structured knowledge is therefore indispensable.


Similar content being viewed by others


References
Herron DM, Marohn M (2008) A consensus document on robotic surgery. Surg Endosc 22:313–325
Moustris GP, Hiridis SC, Deliparaschos KM, Konstantinidis KM (2011) Evolution of autonomous and semi-autonomous robotic surgical systems: a review of the literature. Int J Med Robot 7:375–392
Gopel T, Hartl F, Schneider A, Buss M, Feussner H (2011) Automation of a suturing device for minimally invasive surgery. Surg Endosc 25:2100–2104
Kahler G, Bulian D, Collet P, Eickhoff A, Feussner H, Fritscher-Ravens A, Fuchs K, Hochberger J, Kratt T, Meier PN, Meining A, Schafer H, Wilhelm D (2011) Endoscopic surgery through natural orifices (NOTES) in Germany: status report, 2010. Z Gastroenterol 49:543–549
Kranzfelder M, Schneider A, Gillen S, Feussner H (2011) New technologies for information retrieval to achieve situational awareness and higher patient safety in the surgical operating room: the MRI institutional approach and review of the literature. Surg Endosc 25:696–705
Can S, Fiolka A, Mayer H, Knoll A, Schneider A, Wilhelm D, Meining A, Feussner H (2008) The mechatronic support system “HVSPS” and the way to NOTES. Minim Invasive Ther Allied Technol 17:341–345
Gillen S, Wilhelm D, Meining A, Fiolka A, Doundoulakis E, Schneider A, von Delius S, Friess H, Feussner H (2009) The “ELITE” model: construct validation of a new training system for natural orifice transluminal endoscopic surgery (NOTES). Endoscopy 41:395–399
Wolf A, Shoham M (2009) Medical automation and robotics. Springer, Berlin
Huang HM (2006) The autonomy levels for unmanned systems (ALFUS) framework: interim results. Presented at: Performance Metrics for Intelligent Systems (PerMIS) Workshop, Gaithersburg, MD
Jaspers JE, Breedveld P, Herder JL, Grimbergen CA (2004) Camera and instrument holders and their clinical value in minimally invasive surgery. Surg Laparosc Endosc Percutan Tech 14:145–152
Kristin J, Geiger R, Knapp FB, Schipper J, Klenzner T (2011) Use of a mechatronic robotic camera holding system in head and neck surgery. HNO 59:575–581
Nishikawa A, Nakagoe H, Taniguchi K, Yamada Y, Sekimoto M, Takiguchi S, Monden M, Miyazaki F (2008) How does the camera assistant decide the zooming ratio of laparoscopic images? Analysis and implementation. Med Image Comput Comput Assist Interv 11:611–618
Groeger M, Arbter K, Hirzinger G (2011) Motion tracking for minimally invasive robotic surgery. Institute of Robotics and Mechatronics, German Aerospace Center, Cologne
Omote K, Feussner H, Ungeheuer A, Arbter K, Wei GQ, Siewert JR, Hirzinger G (1999) Self-guided robotic camera control for laparoscopic surgery compared with human camera control. Am J Surg 177:321–324
Kranzfelder M, Schneider A, Blahusch G, Schaaf H, Feussner H (2009) Feasibility of opto-electronic surgical instrument identification. Minim Invasive Ther Allied Technol 18:253–258
Beller S, Eulenstein S, Lange T, Hunerbein M, Schlag PM (2009) Upgrade of an optical navigation system with a permanent electromagnetic position control: a first step towards “navigated control” for liver surgery. J Hepatobiliary Pancreat Surg 16:165–170
Rantanen V, Vanhala T, Tuisku O, Niemenlehto PH, Verho J, Surakka V, Juhola M, Lekkala J (2011) A wearable, wireless gaze tracker with integrated selection command source for human–computer interaction. IEEE Trans Inf Technol Biomed 15:795–801
Houston K, Sieber A, Eder C, Tonet O, Menciassi A, Dario P (2007) Novel haptic tool and input device for real time bilateral biomanipulation addressing endoscopic surgery. Conf Proc IEEE Eng Med Biol Soc 2007:198–201
Chiang MH, Lin HT, Hou CL (2011) Development of a stereo vision measurement system for a 3D three-axial pneumatic parallel mechanism robot arm. Sensors (Basel) 11:2257–2281
Hubens G, Coveliers H, Balliu L, Ruppert M, Vaneerdeweg W (2003) A performance study comparing manual and robotically assisted laparoscopic surgery using the Da Vinci system. Surg Endosc 17:1595–1599
Kenngott HG, Muller-Stich BP, Reiter MA, Rassweiler J, Gutt CN (2008) Robotic suturing: technique and benefit in advanced laparoscopic surgery. Minim Invasive Ther Allied Technol 17:160–167
Mayer H (2008) Human–machine skill transfer in robot assisted, minimally invasive surgery. PhD thesis, Technische Universität München, München
Padoy N, Hager GD (2011) Human–machine collaborative surgery using learned models. In: Proceedings of IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, pp 5285–5292
Chandra V, Nehra D, Parent R, Woo R, Reyes R, Hernandez-Boussard T, Dutta S (2010) A comparison of laparoscopic and robotic assisted suturing performance by experts and novices. Surgery 147:830–839
Supe AN, Kulkarni GV, Supe PA (2010) Ergonomics in laparoscopic surgery. J Minim Access Surg 6:31–36
Bowa Medical (2012) http://www.bowa-medical.com
Miller DJ, Nelson CA, Oleynikov D, Jones DD (2008) Pre-operative ordering of minimally invasive surgical tools: a fuzzy inference system approach. Artif Intell Med 43:35–45
Holler K, Schneider A, Jahn J, Gutierrez J, Wittenberg T, Feussner H, Hornegger J (2010) Spatial orientation in translumenal surgery. Minim Invasive Ther Allied Technol 19:262–273
Nakamoto M, Ukimura O, Faber K, Gill IS (2012) Current progress on augmented reality visualization in endoscopic surgery. Curr Opin Urol 22:121–126
Nicolau S, Soler L, Mutter D, Marescaux J (2011) Augmented reality in laparoscopic surgical oncology. Surg Oncol 20:189–201
Rosenberg LB (1993) Virtual fixtures: perceptual tools for telerobotic manipulation. Presented at: Virtual Reality Annual International Symposium IEEE, Seattle, WA, pp 76–82
Dressler CR, Fischer M, Burgert O, Strauss G (2012) Evaluation of a context sensitive system for intra-operative usage of the electronic patient record. Laryngorhinootologie 91:368–374
Ebert LC, Hatch G, Ampanozi G, Thali MJ, Ross S (2012) You can’t touch this: touch-free navigation through radiological images. Surg Innov 19:301–307
Wachs JP, Stern HI, Edan Y, Gillam M, Handler J, Feied C, Smith M (2008) A gesture-based tool for sterile browsing of radiology images. J Am Med Inform Assoc 15:321–323
Nathan CO, Chakradeo V, Malhotra K, D’Agostino H, Patwardhan R (2006) The voice-controlled robotic assist scope holder AESOP for the endoscopic approach to the sella. Skull Base 16:123–131
El-Shallaly GE, Mohammed B, Muhtaseb MS, Hamouda AH, Nassar AH (2005) Voice recognition interfaces (VRI) optimize the utilization of theatre staff and time during laparoscopic cholecystectomy. Minim Invasive Ther Allied Technol 14:369–371
Hoffer DN, Finelli A, Chow R, Liu J, Truong T, Lane K, Punnen S, Knox JJ, Legere L, Kurban G, Gallie B, Jewett MA (2012) Structured electronic operative reporting: comparison with dictation in kidney cancer surgery. Int J Med Inform 81:182–191
Chau A, Ehrenfeld JM (2011) Using real-time clinical decision support to improve performance on perioperative quality and process measures. Anesthesiol Clin 29:57–69
Liberman D, Trinh QD, Jeldres C, Zorn KC (2012) Is robotic surgery cost-effective: yes. Curr Opin Urol 22:61–65
Lotan Y (2012) Is robotic surgery cost-effective: no. Curr Opin Urol 22:66–69
Acknowledgments
Supported in part by DFG project “Single-Port-Technologie für gastroenterologische und viszeralchirurgische endoskopische Interventionen” (FOR 1321).
Disclosures
Dr. med. Kranzfelder, Dipl. Inf. Staub, Dipl. Ing. Fiolka, Dr. Ing. Schneider, PD Dr. med. Gillen, Dr. med. Wilhelm, Prof. Dr. med. Friess, Prof. Dr. Ing. Knoll and Prof. Dr. med. Feussner have no conflicts of interest or financial ties to disclose.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kranzfelder, M., Staub, C., Fiolka, A. et al. Toward increased autonomy in the surgical OR: needs, requests, and expectations. Surg Endosc 27, 1681–1688 (2013). https://doi.org/10.1007/s00464-012-2656-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-012-2656-y