
Abstract
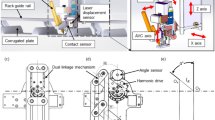
This paper describes the development of a self-driving mobile welding robot. The robot is used to weld U-shaped welding areas in enclosed double-hull structures. In order to place itself inside the double-hull structure, the robot is capable of passing through an access hole 600 mm wide and 800 mm high. This research addresses the mechanical and control systems of the robot. The mechanical system of the robot consists of an eight-axis mobile platform, and a six-axis welding unit. The control system consists of a main controller, a welding machine controller (arc sensor board), and seam tracking sensors, i.e., a touch sensor, a laser sensor, and an arc sensor. To reduce the number of cables that would be dragged by the welding robot, the main controller is designed as an embedded type that is mounted on the back of the mobile platform.




























Similar content being viewed by others

References
Jacobsen NJ (2005) Three generations of robot welding at Odense Steel Shipyard. In: Proceedings of ICCAS 2005, Pusan, Korea, 2–5 June 2005, pp 289–300
Bostelman R, Jacoff A, Bunch R (1999) Delivery of an advanced double-hull ship welding system using Robocrane. In: Third international ICSC symposia on Intelligent Industrial Automation and Soft Computing, Genova, Italy, 1–4 June 1999
Ang MH Jr, Lin W, Lim S-Y (1999) A walk-through programmed robot for welding in shipyards. Ind Robot Int J 26(5):377–388
Miyazaki T, Nakashima Y, Ookubo H, Hebaru K (1999) NC painting robot for shipbuilding. In: Proceedings of ICCAS’99, Boston, MA, USA, 7–11 June 1999, pp 1–14
Lee JH, Hwang HS (1998) Development of robot welding system for panel block assemblies of ship hull. Okpo Ship Technol 46(2):32–40
Kim J, Lee K-Y, Kim T, Lee D, Lee S, Lim C, Kang S-W (2008) Rail running mobile welding robot “RRX3” for the double hull ship structure (I). In: Proceedings of the 17th IFAC World Congr, COEX, Seoul, Korea, 6–11 July 2008, pp 4292–4297
Fridenfalk M, Bolmsjö G (2002) Design and validation of a sensor guided control system for robot welding in shipbuilding. In: Proceedings of ICCAS 2002, Malmoe, Sweden, 9–12 Sept 2002, pp 457–472
Acknowledgments
This work was partially supported by Daewoo Shipbuilding and Marine Engineering Co., Ltd., Geoje, Korea; The Research Institute of Marine System Engineering of Seoul National University, Seoul, Korea; and the Marine Technology Education and Research Center funded by Brain Korea 21 of Seoul National University, Seoul, Korea.
Author information
Authors and Affiliations
Corresponding author
About this article
Cite this article
Ku, N., Cha, Jh., Lee, KY. et al. Development of a mobile welding robot for double-hull structures in shipbuilding. J Mar Sci Technol 15, 374–385 (2010). https://doi.org/10.1007/s00773-010-0099-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-010-0099-5