
Abstract
An information-based technique is described for applications in mechanical property imaging of soft biological media under quasi-static loads. We adapted the Autoprogressive method that was originally developed for civil engineering applications for this purpose. The Autoprogressive method is a computational technique that combines knowledge of object shape and a sparse distribution of force and displacement measurements with finite-element analyses and artificial neural networks to estimate a complete set of stress and strain vectors. Elasticity imaging parameters are then computed from estimated stresses and strains. We introduce the technique using ultrasonic pulse-echo measurements in simple gelatin imaging phantoms having linear-elastic properties so that conventional finite-element modeling can be used to validate results. The Autoprogressive algorithm does not require any assumptions about the material properties and can, in principle, be used to image media with arbitrary properties. We show that by selecting a few well-chosen force–displacement measurements that are appropriately applied during training and establish convergence, we can estimate all nontrivial stress and strain vectors throughout an object and accurately estimate an elastic modulus at high spatial resolution. This new method of modeling the mechanical properties of tissue-like materials introduces a unique method of solving the inverse problem and is the first technique for imaging stress without assuming the underlying constitutive model.













Similar content being viewed by others


References
Altahhan KN, Wang Y, Sobh N, Insana MF (2016) Indentation measurements to validate dynamic elasticity imaging methods. Ultrason Imaging 38(5):332–345
Barr RG (2014) Elastography in clinical practice. Radiol Clin North Am 52(6):1145–1162
Ghaboussi J (2010) Advances in neural networks in computational mechanics and engineering. In: Advances of soft computing in engineering. Springer, New York, pp 191–236
Ghaboussi J, Sidarta D (1998) New nested adaptive neural networks (NANN) for constitutive modeling. Comput Geotech 22(1):29–52
Ghaboussi J, Pecknold DA, Zhang M, Haj-ali RM (1998) Autoprogressive training of neural network constitutive models. Int J Numer Meth Eng 42(1):105–126
Hashash YMA, Jung S, Ghaboussi J (2004) Numerical implementation of a neural network based material model in finite element analysis. Int J Numer Meth Eng 59(7):989–1005
Hoerig C, Ghaboussi J, Insana MF (2015) Informational modeling of tissue-like materials using ultrasound. In: 12th IEEE international symposium on biomedical imaging, ISBI 2015, Brooklyn, NY, USA. April 16–19, 2015, pp 239–242
Hoerig C, Ghaboussi J, Fatemi M, Insana MF (2016) A new approach to ultrasonic elasticity imaging. In: Proceedings SPIE medical imaging: ultrasonic imaging and tomography, international society for optics and photonics 9790, pp G1–G9
Huang J, Ong S, Nee A (2015) Real-time finite element structural analysis in augmented reality. Adv Eng Softw 87:43–56
Kallel F, Bertrand M (1996) Tissue elasticity reconstruction using linear perturbation method. IEEE Trans Med Imaging 15(3):299–313
Orescanin M, Insana M (2010) Shear modulus estimation with vibrating needle stimulation. IEEE Trans Ultrason Ferroelectr Freq Control 57(6):1358–1367
Riedmiller M, Braun H (1993) A direct adaptive method for faster backpropagation learning: the RPROP algorithm. IEEE Int Conf Neural Netw 1:586–591
Rivaz H, Boctor EM, Choti MA, Hager GD (2011) Real-time regularized ultrasound elastography. IEEE Trans Med Imaging 30(4):928-45
Taylor ZA, Cheng M, Ourselin S (2007) Real-time nonlinear finite element analysis for surgical simulation using graphics processing units. Springer, Berlin
Tyagi M, Goenezen S, Barbone PE, Oberai AA (2014) Algorithms for quantitative quasi-static elasticity imaging using force data. Int J Numer Methods Biomed Eng 30(12):1421–1436
Acknowledgements
Research reported in this publication was supported by the National Cancer Institute of the National Institutes of Health under Award Number R01CA168575. The content is solely the responsibility of the authors and does not necessarily represent the official views of the National Institutes of Health. The authors gratefully acknowledge a generous supply of gelatin provided by Rousselot Inc., Dubuque IA. The authors would also like to thank H. Rivaz, E. M. Boctor, M. A Choti, and G. D. Hager for providing the source code for their real-time strain estimation algorithm.
Conflict of interest
the authors have filed a provisional patent application for this work.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Accuracy of displacement estimates
Building accurate informational models depends on acquiring accurate force and displacement measurements. We were interested in evaluating the displacement errors introduced through speckle-tracking and how those errors propagated through the load increments. Because displacement estimates were made between consecutive RF frames, estimates for the later load increments are the sum of many displacement maps. Quantifying displacement errors and tracking how they changed with successive load increments allowed us to ensure the effects of displacement errors on ANN training with AutoP would be minimal.
A \(50 \times 50 \times 50\, \hbox {mm}^3\) homogeneous phantom was constructed and imaged in the same manner described in Sect. 2.1. After creating the FE model (here, a rectilinear mesh was used for the phantom), a version of \(\text {FEA}_\varepsilon \) was solved for the model where only probe displacements were applied. A total of 10 load increments were applied to compress the phantom 1.5 mm. Because the phantom was homogeneous and the FEA was displacement controlled, the displacements computed at the nodes are the same regardless of the stiffness of the phantom.
Axial node displacements estimated from the US images were compared to those computed in the FEA using equation
where i indexes the nodes, n indexes the load increment, \(e_i^n\) is the displacement error, \(u_i^n\) is the displacement computed in the FEA, and \(\hat{u}_i^n\) is the displacement estimated via speckle tracking. This is the same error computation for convergence described in Sect. 2.2.4. A histogram of the axial displacement errors for all 399 nodes in the imaged region across the ten load increments is plotted in Fig. 14a. To compare these errors to the convergence criteria specified in Sects. 2.4 and 2.6, \(c_{\mu } = 0.000022\) and \(c_\mathrm{max} = 0.0001\). These values are several orders of magnitude smaller than the chosen convergence criteria, suggesting that the test for convergence in each iteration of AutoP will be mostly affected by the material properties learned by the ANNs, not errors caused by speckle-tracking.
Tracking \(c_{\mu }\) and \(c_\mathrm{max}\) through the load increments, it was found that both increased monotonically and approximately linearly, as shown in Fig. 14a. A monotonically increasing error implies that the displacement errors are biased and the linearity suggests the error in displacement estimates between RF frames is consistent. But, as just mentioned, the errors are well below the set convergence criteria and should not have a significant impact on the displacement error calculation. It is a point to consider, though, if applied loads produce large deformations over many increments.

a Histogram of displacement errors. b Both \(c_{\mu }^n\) and \(c_\mathrm{max}^n\), where n is the load increment, increase approximately linearly, suggesting the speckle-tracking produces a consistent, biased error
Appendix 2: The effect of noise on stress–strain training data
Classic mathematical inverse methods typically require many samples of data to reduce the effect of noise on the solution. It seems counter-intuitive, then, when we claim that using a smaller number of displacements in \(\text {FEA}_\varepsilon \) enables the ANNs to more reliably learn the underlying mechanical properties. Our new method of elasticity imaging takes an alternative approach to the inverse problem that does not appear to follow the rules of classical inverse methods.
Current elastographic modalities formulate inverse problems that involve first- or second-order derivatives that are highly sensitive to noise. To combat noise amplification, those methods use sums or averages over many samples. We, however, are not directly solving the inverse problem. The sparse measurements of force and displacements are distributed across the entire mesh of the two FEA elements in AutoP and iteratively reconciled through the ANNs. Since AutoP model building occurs after several load steps and passes, the influence of noise introduced by sparse measurements at each load step is diminished through the process of FEA reconciliation. The effect of noise in the pipeline can best be demonstrated with a small example.

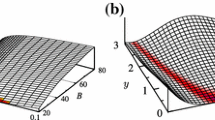
Comparing the effects of using many noisy displacements to only a few. Using many noisy displacements a causes large variance in the stress–strain training data b that have a negative impact on the ability of the ANNs to learn the underlying mechanical properties
Using measurements from Phantom 1, consider two situations: (1) axial displacements are provided at every node in the imaged region (Fig. 15a, left) and (2) axial displacements are provided at three locations within the inclusion (Fig. 15a, right) in \(\text {FEA}_\varepsilon \). The two axial strain images in the center of Fig. 15a visualize the effect of noise on the resulting strain. Note that the color scales are different to help visualize the axial strain distribution in both cases. Going one step further, the axial stress–strain data are plotted in Fig. 15b for \(\text {ANN}_\mathrm{soft}\) and \(\text {ANN}_\mathrm{stiff}\). These plots were obtained by pairing stresses from \(\text {FEA}_\sigma \) with strains from \(\text {FEA}_\varepsilon \) and pulling out only the axial components.
It is the job of the ANNs to generalize the data in Fig. 15b. Note that the stress and strain vectors each have three components in 2-D (six in 3-D), meaning the Fig. 15b only provides a partial picture of the function being approximated by the ANNs. However, the plots do provide a useful comparison. In the case of many displacements, the increased variance present in the strain data causes the ANNs to learn incorrect material properties. For the gelatin phantoms exhibiting linear-elastic material properties, the spreading of the strain data decreases the slope of the stress–strain curve. In all of our tests, using displacements at every point (or every other point) in the imaged region resulted in Young’s modulus estimates much smaller than the true value. Using fewer displacements produces some variance that influences changes in the ANN connection weights during training. As AutoP iterations progress, the smaller variations caused by using few displacements in \(\text {FEA}_\varepsilon \) allow the ANNs to gradually learn the correct material properties instead of attempting to force large changes in the learned behavior at once.
Rights and permissions
About this article

Cite this article
Hoerig, C., Ghaboussi, J. & Insana, M.F. An information-based machine learning approach to elasticity imaging. Biomech Model Mechanobiol 16, 805–822 (2017). https://doi.org/10.1007/s10237-016-0854-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10237-016-0854-6