
Abstract
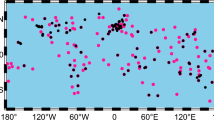
Using uncombined (UC) or undifferenced original observations has become a research topic in the global navigation satellite system (GNSS) community. This far, precise orbit determination (POD) with ionospheric-free (IF) observation combination has been favored. Using the uncombined strategy, i.e., using the raw observations to perform POD, the slant ionospheric delay is regarded as an unknown epoch parameter. We assume that the slant ionospheric delay depends on the frequency having the same magnitude for pseudoranges and carrier phases but opposite sign. Since there are, at each station and each epoch, as many ionospheric delay parameters as the observed satellites, a large number of ionospheric parameters need to be estimated for uncombined POD. The usual approch is that, when the observations at an epoch are accumulated, the epoch parameters consisting of clock and ionospheric parameters are eliminated simultaneously, which results in low computational efficiency. We develop a high-efficiency method by eliminating ionospheric parameters one by one, where each of them is eliminated when the observations of a station and a satellite are accumulated and no matrix inversion is required. In this uncombined POD algorithm, the IF-combined clock datum adopted by the international GNSS service (IGS) clock products is used to keep compatibility with existing IGS products by using the re-parameterized observation equations. We deduce the ambiguity resolution strategy for uncombined POD. In the experimental part, the modified parameter elimination method is first validated. With GPS observations from 58 global IGS stations, the first iteration processing time of parameter estimation for IF POD, UC POD and modified UC POD are 3.6, 62.5 and 9.2 min, respectively. The computational efficiency of modified UC POD strategy is greatly improved compared to UC POD. Then, the IF POD and the improved UC POD strategies with ambiguity float and fixed solutions are analyzed by comparing orbits, clocks, station coordinates and tropospheric delays with respect to IGS products. Results show that the accuracy of UC and IF solutions is comparable. Afterward, the repeatability of station coordinates is analyzed. With the solutions of 13 POD arcs, the repeatability over 13 days is consistent for UC and IF strategy. In addition, the ambiguity fixing rate, data usage rate, as well as residuals of code and phase observations, is analyzed. It is concluded that the slight difference between UC and IF strategy may be related to the data usage rate.















Similar content being viewed by others
References
Beutler G, Brockmann E, Gurtner W, Hugentobler U, Mervart L, Rothacher M, Verdun A (1994) Extended orbit modeling techniques at the CODE processing center of the international GPS service for geodynamics (IGS): theory and initial results. Manuscr Geod 19(6):367–386
Bierman GJ (1977) Factorization methods for discrete sequential estimation. Academic Press, New York
Blewitt G (1989) Carrier phase ambiguity resolution for the global positioning system applied to geodetic baselines up to 2000 km. J Geophys Res Solid Earth 94(B8):187–203. https://doi.org/10.1029/JB094iB08p10187
Blewitt G (1990) An automatic editing algorithm for GPS data. Geophys Res Lett 17(3):199–202. https://doi.org/10.1029/GL017i003p00199
Boehm J, Niell A, Tregoning P, Schuh H (2006) Global mapping function (GMF): a new empirical mapping function based on numerical weather model data. Geophys Res Lett 33(7):L07304. https://doi.org/10.1029/2005GL025546
Bondy J, Murty U (1977) Graph theory with applications. J Oper Res Soc 28(1):237–238
Deo M, El-Mowafy A (2018) Triple-frequency GNSS models for PPP with float ambiguity estimation: performance comparison using GPS. Surv Rev 50(360):249–261. https://doi.org/10.1080/00396265.2016.1263179
Dong D, Bock Y (1989) Global positioning system network analysis with phase ambiguity resolution applied to crustal deformation studies in California. J Geophys Res Solid Earth 94(B4):3949–3966. https://doi.org/10.1029/JB094iB04p03949
Ge M, Gendt G, Dick G, Zhang F (2005) Improving carrier-phase ambiguity resolution in global GPS network solutions. J Geod 79(1–3):103–110. https://doi.org/10.1007/s00190-005-0447-0
Ge M, Gendt G, Dick G, Zhang F, Rothacher M (2006) A new data processing strategy for huge GNSS global networks. J Geod 80(4):199–203. https://doi.org/10.1007/s00190-006-0044-x
Ge M, Gendt G, Rothacher M, Shi C, Liu J (2008) Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J Geod 82(7):389–399. https://doi.org/10.1007/s00190-007-0187-4
Ge M, Chen J, Douša J, Gendt G, Wickert J (2012) A computationally efficient approach for estimating high-rate satellite clock corrections in realtime. GPS Solut 16(1):9–17. https://doi.org/10.1007/s10291-011-0206-z
Geng J, Meng X, Dodson A, Teferle F (2010) Integer ambiguity resolution in precise point positioning: method comparison. J Geod 84(9):569–581. https://doi.org/10.1007/s00190-010-0399-x
Gu S, Lou Y, Shi C, Liu J (2015) BeiDou phase bias estimation and its application in precise point positioning with triple-frequency observable. J Geod 89(10):979–992. https://doi.org/10.1007/s00190-015-0827-z
Guo J (2014) The impacts of attitude, solar radiation and function model on precise orbit determination for GNSS satellites. Ph.D. thesis, Wuhan University (in Chinese)
Guo J, Geng J (2018) GPS satellite clock determination in case of inter-frequency clock biases for triple-frequency precise point positioning. J Geod 92(10):1133–1142. https://doi.org/10.1007/s00190-017-1106-y
Guo F, Zhang X, Wang J, Ren X (2016a) Modeling and assessment of triple-frequency BDS precise point positioning. J Geod 90(11):1223–1235. https://doi.org/10.1007/s00190-016-0920-y
Guo J, Xu X, Zhao Q, Liu J (2016b) Precise orbit determination for quad-constellation satellites at Wuhan University: strategy, result validation, and comparison. J Geod 90(2):143–159. https://doi.org/10.1007/s00190-015-0862-9
Hatch R (1982) The synergism of GPS code and carrier measurements. In: Proceedings of the 3rd international symposium on satellite Doppler positioning, New Mexico, February 8–12, 1982, vol 2, pp 1213–1231
Johnston G, Riddell A, Hausler G (2017) The international GNSS service. In: Springer handbook of global navigation satellite systems. Springer, Cham, pp 967–982. https://doi.org/10.1007/978-3-319-42928-1_33
Kouba J (2009) A guide to using International GNSS Service (IGS) products. https://www.researchgate.net/profile/Jan_Kouba/research
Li X, Ge M, Zhang H, Wickert J (2013) A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J Geod 87(5):405–416. https://doi.org/10.1007/s00190-013-0611-x
Li P, Zhang X, Ge M, Schuh H (2018) Three-frequency BDS precise point positioning ambiguity resolution based on raw observables. J Geod 92(12):1357–1369. https://doi.org/10.1007/s00190-018-1125-3
Liu T, Yuan Y, Zhang B, Wang N, Tan B, Chen Y (2017) Multi-GNSS precise point positioning (MGPPP) using raw observations. J Geod 91(3):253–268. https://doi.org/10.1007/s00190-016-0960-3
Malys S, Jensen PA (1990) Geodetic point positioning with GPS carrier beat phase data from the CASA UNO experiment. Geophys Res Lett 17(5):651–654. https://doi.org/10.1029/GL017i005p00651
Mannucci A, Wilson B, Yuan D, Ho C, Lindqwister U, Runge T (1998) A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci 33(3):565–582. https://doi.org/10.1029/97RS02707
Melbourne WG (1985) The case for ranging in GPS-based geodetic systems. In: Proceedings of the first international symposium on precise positioning with the global positioning system, Rockville, pp 373–386
Montenbruck O, Steigenberger P, Prange L, Deng Z, Zhao Q, Perosanz F, Schmid R (2017) The multi-GNSS experiment (MGEX) of the International GNSS Service (IGS)–achievements, prospects and challenges. Adv Space Res 59(7):1671–1697. https://doi.org/10.1016/j.asr.2017.01.011
Prange L, Orliac E, Dach R, Arnold D, Beutler G, Schaer S, Jäggi A (2017) CODE’s five-system orbit and clock solution—the challenges of multi-GNSS data analysis. J Geod 91(4):345–360. https://doi.org/10.1007/s00190-016-0968-8
Ruan R (2015) Ambiguity resolution for GPS/GNSS network solution implemented in SPODS. Acta Geod Cartogr Sin 44(2):128–134 (in Chinese)
Ruan R, Wei Z (2019) Between-satellite single-difference integer ambiguity resolution in GPS/GNSS network solutions. J Geod. https://doi.org/10.1007/s00190-019-01251-z
Ruan R, Jia X, Wu X, Feng L, Zhu Y (2014) SPODS software and its result of precise orbit determination for GNSS satellites. In: China Satellite Navigation Conference (CSNC) 2014 proceedings, vol 3. Springer, Berlin, pp 301–312. https://doi.org/10.1007/978-3-642-54740-9_27
Schönemann E (2014) Analysis of GNSS raw observations in PPP solutions. Ph.D. Thesis, TU Darmstadt, Darmstadt
Schönemann E, Becker M, Springer T (2011) A new approach for GNSS analysis in a multi-GNSS and multi-signal environment. J Geod Sci 1(3):204–214. https://doi.org/10.2478/v10156-010-0023-2
Strasser S, Mayer-Gürr T, Zehentner N (2019) Processing of GNSS constellations and ground station networks using the raw observation approach. J Geod 93(7):1045–1057. https://doi.org/10.1007/s00190-018-1223-2
Weiss JP, Steigenberger P, Springer T (2017) Orbit and clock product generation. In: Teunissen PJ, Montenbruck O (eds) Springer handbook of global navigation satellite systems, Springer handbooks. Springer, Cham, pp 983–1010. https://doi.org/10.1007/978-3-319-42928-1_34
Wübbena G (1985) Software developments for geodetic positioning with GPS using TI-4100 code and carrier measurements. In: Proceedings of the 1st international symposium on precise positioning with the global positioning system, Rockville, pp 403–412
Xiao G, Li P, Gao Y, Heck B (2019) A unified model for multi-frequency PPP ambiguity resolution and test results with Galileo and BeiDou triple-frequency observations. Remote Sens 11(2):116. https://doi.org/10.3390/rs11020116
Yang Y, Gao W, Guo S, Mao Y, Yang Y (2019) Introduction to BeiDou-3 navigation satellite system. Navigation 66(1):7–18
Zehentner N, Mayer-Gürr T (2014) New approach to estimate time variable gravity fields from high-low satellite tracking data. In: Martiu (ed) Gravity, geoid and height systems. International Association of Geodesy symposia, vol 141, pp 111–116. Springer, Cham. https://doi.org/10.1007/978-3-319-10837-7_14
Zehentner N, Mayer-Gürr T (2016) Precise orbit determination based on raw GPS measurements. J Geod 90(3):275–286. https://doi.org/10.1007/s00190-015-0872-7
Zhang B, Ou J, Yuan Y, Li Z (2012) Extraction of line-of-sight ionospheric observables from GPS data using precise point positioning. Sci China Earth Sci 55(11):1919–1928. https://doi.org/10.1007/s11430-012-4454-8
Zumberge J, Heflin M, Jefferson D, Watkins M, Webb F (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res Solid Earth 102(B3):5005–5017. https://doi.org/10.1029/96JB03860
Acknowledgements
IGS is gratefully acknowledged for providing GPS data. The research was substantially funded by State Key Laboratory of Geo-Information Engineering, No. SKLGIE2018-M-2-1 and by National Natural Science Foundation of China (Grant Nos. 41674016, 41704035, 41874041). Finally, we express our sincere gratitude to anonymous reviewers for their valuable suggestions.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zeng, T., Sui, L., Xiao, G. et al. Computationally efficient dual-frequency uncombined precise orbit determination based on IGS clock datum. GPS Solut 23, 105 (2019). https://doi.org/10.1007/s10291-019-0898-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-019-0898-z