
Abstract
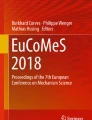
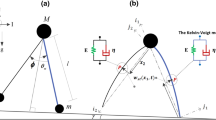
This paper presents a new passive-biped model consisting of a simplest walking model beneath an upper body, with no kinematic constraint. The upper body is attached to the legs with a linear torsional spring. The model is a passive dynamic walker, so it walks down a slope without energy input. The governing equations of motion are derived and simulated for the parameter analysis purposes. Simulation results reveal some different routes to chaos that have not been observed in previous models.
Similar content being viewed by others

References
McGeer, T.: Passive dynamic walking. International Journal of Robotics Research 9(5), 62–82 (1990)
McGeer, T.: Dynamics and control of bipedal locomotion. Journal of Theoretical Biology 163(3), 277–314 (1993)
Garcia, M., Chatterjee, A., Ruina, A., et al.: The simplest walking model: Stability, complexity, and scaling. ASME Journal of Biomechanical Engineering 120, 281–288 (1998)
Tehrani Safa, A., Ghaffari Saadat, M., Naraghi, M.: Passive dynamic of the simplest walking model: Replacing ramps with stairs. Mechanism and Machine Theory 42(10), 1314–1325 (2007)
Wisse, M., Schwab, A.L., Vander Helm, F.C.T.: Passive dynamic walking model with upper body. Robotica 22, 681–688 (2004)
Gomes, M.W., Ruina, A.L.: A walking model with no energy cost. Department of Theoretical and Applied Mechanics, Cornell University, 25 Aug. (2004) http://ruina.tam.cornell.edu/research/topics/locomotion and robotics/
Kurz, M.J., Stergiou, N., Heidel, J., et al.: A template for the exploration of chaotic locomotive patterns. Chaos Solutions & Fractals 23(2), 485–493 (2005)
Hilborn, R.C.: Chaos and Nonlinear Dynamics, An Introduction for Scientists and Engineers. 2nd edn. Oxford University Press, Oxford (2000)
Stillwell, J.: Classical Topology and Combinatorial Group Theory. 2nd edn. Springer Press, Berlin (1993)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Farshimi, F., Naraghi, M. A passive-biped model with multiple routes to chaos. Acta Mech Sin 27, 277–284 (2011). https://doi.org/10.1007/s10409-011-0422-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10409-011-0422-3