
Abstract
The reports after major earthquakes indicate that the earthquake-induced pounding between insufficiently separated buildings may lead to significant damage or even total collapse of structures. An intensive study has recently been carried out on mitigation of pounding hazards so as to minimize the structural damages or prevent collisions at all. The aim of this paper is to investigate the effectiveness of the method when two adjacent three-storey buildings with different (substantially different) dynamic properties are connected at each storey level by link elements (springs, dashpots or viscoelastic elements). The results of the study indicate that connecting the structures by additional link elements can be very beneficial for the lighter and more flexible building. The largest decrease in the response of the structure has been obtained for links with large stiffness or damping values, which stands for the case when two buildings are fully connected and vibrate in-phase. Moreover, by comparing the effectiveness of different types of link elements, it has been confirmed that the use of viscoelastic elements reduces the peak displacement of the structure at lower stiffness and damping values comparing to the case when spring and dashpot elements are applied alone. On the other hand, the results of the study demonstrate that applying the additional link elements does not really change the response of the heavier and stiffer building. The final conclusion of the study indicates that linking two buildings allows us to reduce the in-between gap size substantially while structural pounding can be still prevented.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
It has been observed during earthquakes that adjacent buildings might come into contact if the separation distance between them is not sufficient so as to accommodate their relative movements. This phenomenon, known as the earthquake-induced structural pounding, may result in local damage at the contact locations during moderate ground motions or may lead to substantial damage or even total collapse of structures during severe seismic excitations (see, for example, Rosenblueth and Meli 1986; Kasai and Maison 1997). The most common reason of structural pounding between neighbouring buildings is the difference in their natural periods (Anagnostopoulos 1988; Anagnostopoulos and Spiliopoulos 1992; Maison and Kasai 1990, 1992; Karayannis and Favvata 2005a, b; Jankowski 2005, 2007a, b; Komodromos 2008; Mahmoud and Jankowski 2009, 2011; Polycarpou and Komodromos 2010a, b). The difference in mass or stiffness makes the structures to vibrate out-of-phase during the ground motion increasing the probability of structural collisions.
An intensive study has been carried out on mitigation of pounding hazards in order to minimize structural damages during seismic excitations. One of the objectives is to develop procedures for evaluating the appropriate separation gap between buildings so as to prevent structural interactions (see Jeng et al. 1992; Penzien 1997; Lin and Weng 2001a, b; Lopez-Garcia 2004; Mahmoud et al. 2013; Sołtysik and Jankowski 2013; Abdel Raheem 2014; Naderpour et al. 2016). The minimum separation distance is specified in the recent earthquake-resistant design codes (ECS 1998; IS 2002; NBC 2003; IBC 2009). However, due to the land shortage and high land prices in many places, making the separation gap between buildings large is not an easy solution to be accepted by the land owners. The use of isolation devices (see, for example, Kelly 1993; Naeim and Kelly 1999; Salomón et al. 1999; Komodromos 2000, 2008; Mahmoud et al. 2012; Falborski et al. 2012; Falborski and Jankowski 2013; Jankowski 2015), which is considered to be a very effective method, makes this problem even worse since it results in substantial increase in the structural displacements (Maison and Ventura 1992; Malhotra 1997; Polycarpou and Komodromos 2010a, b; Mahmoud and Gutub 2013). Moreover, there are many examples of old buildings, which have been constructed nearly in contact with each other (see Jeng and Tzeng 2000; Wasti and Ozcebe 2003), as it was not prohibited according to the old earthquake-resistant design codes.
Another approach to mitigate pounding effects under seismic excitations is to consider some pounding reduction methods in order to enhance the performance of structures without sufficient in-between gap size. One of the techniques is linking buildings which allow the forces to be transmitted between structures and thus eliminate interactions. Stiff links as well as some viscoelastic elements have been tested for such purposes. For example, Westermo (1989) suggested to connect buildings by additional stiff beams. The links between neighbouring structures can also have some energy dissipating properties and impacts can be partly absorbed (Kobori et al. 1988). In order to control and eliminate the structural collisions between two adjacent structures, a coupling element was used by Zhu and Iemura (2000). Kasai et al. (1992) applied viscoelastic dampers for the purpose of connecting the neighbouring buildings and mitigate pounding effects. Similar studies concerning structures linked by damping devices were also conducted by other researchers (see, for example, Xu et al. 1999; Zhang and Xu 1999; Ni et al. 2001). The optimal values for the distribution of viscous dampers connecting the buildings of different heights were determined by Luco and De Barros (1998). Investigations on the dynamic characteristics and seismic response of adjacent structures connected by fluid dampers were conducted by Zhang and Xu (2000), Yang et al. (2003) and Zhu and Xu (2005). Another technique concerns installation of bumpers, shock absorbers or collision shear walls which can help in preventing sudden shocks due to collisions (Anagnostopoulos and Spiliopoulos 1992; Anagnostopoulos 1996; Anagnostopoulos and Karamaneas 2008; Polycarpou et al. 2013; Abdel Raheem 2014).
The aim of the present paper is to investigate the effects of connecting two adjacent equal height three-storey buildings with different (substantially different) dynamic properties by link elements, as a strategy for mitigation of earthquake-induced pounding between insufficiently separated structures. Using the discrete three-degree-of-freedom numerical models of buildings, three cases have been studied. In the first one, spring elements have been applied as links at all the storey levels, link elements in the form of dashpots have been considered in the second one, whereas the third case deals with the application of viscoelastic elements combining both springs and dashpots. The effectiveness of link elements has been tested for different values of spring stiffness and dashpot damping and the optimum values required to obtain the largest reduction in the structural response have been analyzed.
2 Buildings separated by large gap size preventing pounding
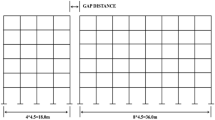
For the purposes of the study, let us consider two adjacent three-storey buildings with different dynamic properties, which are separated by the gap size, d. The simplified model of the structures can be defined by using the discrete three-degree-of-freedom structural models with mass of each storey lumped at the floor level (see Fig. 1). The dynamic equation of motion of both structures for the case when the gap size is large enough to prevent pounding, considering nonlinear (elastic-perfectly plastic) material behaviour, can be written as:

Model of adjacent three-storey buildings with different dynamic properties
where \( {\ddot{\textit{x}}}_{i}^{L} (t) \), \( {\ddot{\textit{x}}}_{i}^{R} (t) \), \( \dot{x}_{i}^{L} (t) \), \( \dot{x}_{i}^{R} (t) \), \( x_{i}^{L} (t) \), \( x_{i}^{R} (t) \) \( (i = 1,\ldots,3) \) is the acceleration, velocity and displacement of a single storey of the left (upper index L) and the right (upper index R) building, respectively; \( m_{i}^{L} \), \( m_{i}^{R} \) stand for the storey masses; \( F_{Si}^{L} (t) \), \( F_{Si}^{R} (t) \) are inelastic storey shear forces equal to: \( F_{Si}^{L} (t) = K_{i}^{L} \left( {x_{i}^{L} (t) - x_{i - 1}^{L} (t)} \right) \), \( F_{Si}^{R} (t) = K_{i}^{R} \left( {x_{i}^{R} (t) - x_{i - 1}^{R} (t)} \right) \) for the elastic range till the storey yield strength \( F_{Yi}^{L} \), \( F_{Yi}^{R} \) is reached and \( F_{Si}^{L} (t) = \pm F_{Yi}^{L} \), \( F_{Si}^{R} (t) = \pm F_{Yi}^{R} \) for the plastic range; \( K_{i}^{L} \), \( C_{i}^{L} \), \( K_{i}^{R} \), \( C_{i}^{R} \) are elastic structural stiffness and damping coefficients and \( {\ddot{\textit{x}}}_{g} (t) \) is the acceleration of input ground motion.
As the example, two three-storey buildings with the following structural properties have been considered in the study (see Jankowski 2008):
-
left building:
-
\( m_{1}^{L} = m_{2}^{L} = m_{3}^{L} = 25 \times 10^{3} \,{\text{kg}} \)
-
\( K_{1}^{L} = K_{2}^{L} = K_{3}^{L} = 3.460 \times 10^{6} {\text{ N/m}}\quad (T^{L} = 1.2\,{\text{s)}} \)
-
\( C_{1}^{L} = C_{2}^{L} = C_{3}^{L} = 6.609 \times 10^{4} \,{\text{kg/s}}\quad (\xi^{L} = 0.05) \)
-
\( F_{Y1}^{L} = F_{Y2}^{L} = F_{Y3}^{L} = 1.369 \times 10^{5} \,{\text{N}} \)
-
-
right building:
-
\( m_{1}^{R} = m_{2}^{R} = m_{3}^{R} = 1000 \times 10^{3} \,{\text{kg}} \)
-
\( K_{1}^{R} = K_{2}^{R} = K_{3}^{R} = 2.215 \times 10^{9} {\text{ N/m}}\quad (T^{R} = 0.3\,{\text{s)}} \)
-
\( C_{1}^{R} = C_{2}^{R} = C_{3}^{R} = 1.058 \times 10^{7} \,{\text{kg/s}}\quad (\xi^{R} = 0.05) \)
-
\( F_{Y1}^{R} = F_{Y2}^{R} = F_{Y3}^{R} = 1.442 \times 10^{7} \,{\text{N}} \)
-
where \( T^{L} \), \( T^{R} \), \( \xi^{L} \), \( \xi^{R} \) is the natural period and damping ratio of the left (upper index L) and the right (upper index R) building, respectively. In order to solve the equation of motion (1) numerically, the time-stepping Newmark method (1959), with the standard parameters: \( \gamma_{N} = 0.5 \), \( \beta_{N} = 0.25 \) and constant time step \( \Delta t = 0. 0 0 2\;{\text{s}} \), has been used. Different earthquake records (see Table 1 for details) have been considered in the analysis. Generally speaking, the results for all of them show similar tendencies. Therefore, due to the space limitations, the examples of the representative results of the study obtained for the El Centro earthquake are presented in this paper. In particular, Fig. 2 shows the displacement time histories for all storeys of both buildings. The peak displacement values have been calculated as equal to: 0.0600, 0.1120 and 0.1429 m for the first, second and third storey of the left building (lighter and more flexible one), respectively. On the other hand, the peak displacement values of the right building (heavier and stiffer one) are equal to: 0.0088, 0.0153 and 0.0187 m for the first, second and third storey, respectively. Moreover, the gap size of \( d = 0.14\;{\text{m}} \) has to be assured so as to prevent pounding between analyzed structures under the ground motion.

Displacement time histories for buildings separated by large gap size preventing pounding: a first storeys, b second storeys, c third storeys
3 Buildings linked by spring elements
Let us now consider the case when two three-storey buildings are linked at each storey level by spring elements (see Fig. 3). The dynamic equation of motion under earthquake excitation for the model shown in Fig. 3 can be written as (see Cimellaro and Lopez-Garcia 2011 and compare Eq. 1):
where \( {\ddot{x}}_{i}^{L} (t) \), \( {\ddot{x}}_{i}^{R} (t) \), \( \dot{x}_{i}^{L} (t) \), \( \dot{x}_{i}^{R} (t) \), \( x_{i}^{L} (t) \), \( x_{i}^{R} (t) \) \( (i = 1,\ldots,3) \) is the acceleration, velocity and displacement of a single storey of the left (upper index L) and the right (upper index R) building, respectively; \( m_{i}^{L} \), \( m_{i}^{R} \) stand for the storey masses; \( K_{i}^{L} \), \( C_{i}^{L} \), \( K_{i}^{R} \), \( C_{i}^{R} \) are the structural stiffness and damping coefficients; \( K_{B} \) denotes stiffness coefficient of spring elements and \( {\ddot{x}}_{g} (t) \) is the acceleration of input ground motion. It should be underlined that the above equation of motion is only valid for such values of stiffness coefficient of spring elements which are large enough to prevent structural pounding for the specified gap size between buildings.

Model of adjacent three-storey buildings linked by spring elements
In the analysis, the stiffness coefficient of spring elements, \( K_{B} \), has been changed from 0 to \( 8 \times 10^{7} {\text{ N/m}} \). The time-stepping Newmark method with constant time step \( \Delta t = 0. 0 0 2\;{\text{s}} \) has been used in order to solve the equation of motion (2) numerically. Different earthquake records (see Table 1 for details) have been considered in the analysis. The representative examples of the results of the study are presented in Figs. 4, 5 and 6. Figure 4 shows the peak displacements of the third storeys of both buildings with respect to stiffness of spring elements for different earthquake records, as the results of parametric study. Additionally, the displacement time histories for all storeys of both buildings for two chosen values of \( K_{B} = 5 \times 10^{6} \,{\text{N/m}} \) (moderate stiffness) and \( K_{B} = 8 \times 10^{7} \,{\text{N/m}} \) (large stiffness inducing in-phase vibrations) for the El Centro earthquake are presented in Figs. 5 and 6, respectively.


Peak displacements of the third storeys of buildings with respect to stiffness of linking spring elements for different earthquake records

Displacement time histories for buildings linked by spring elements with \( K_{B} = 5 \times 10^{6} \,{\text{N/m}} \): a first storeys, b second storeys, c third storeys

Displacement time histories for buildings linked by spring elements with \( K_{B} = 8 \times 10^{7} \,{\text{N/m}} \): a first storeys, b second storeys, c third storeys
It can be seen from Fig. 4 that the increase in stiffness value of spring elements is, generally speaking, beneficial for the response of the left building. In the case when stiffness is equal to zero (buildings are not connected and move out-of-phase with the response shown in Fig. 2), the obtained peak displacements of the left building under the El Centro earthquake are equal to: 0.0600, 0.1120 and 0.1429 m for the first, second and third storey, respectively. For stiff linking with high stiffness value (buildings are fully connected and move in-phase with the response shown in Fig. 6), the obtained peak displacements of the structure are as small as: 0.0112, 0.0182 and 0.0213 m for the first, second and third storey, respectively. The obtained values for the left building under the El Centro earthquake, in the case of independent vibrations and stiff linking, show significant reductions in the peak displacements, equal to 81, 84 and 85 %, respectively. On the other hand, it can also be seen from Fig. 4 that applying the additional spring elements does not really change the response of the right building, apart from the ground motion analyzed. For the El Centro earthquake, the differences between the case of independent vibrations shown in Fig. 2 (spring stiffness is equal to zero) and stiff linking with the response shown in Fig. 6 (high value of spring stiffness) is relatively small and is equal to: 3.4, 2.6 and 2.7 % for the first, second and third storey of the building, respectively. It can also be seen from Figs. 5 and 6 that linking two buildings by spring elements results in substantial reduction in gap size value required to prevent pounding. By the application of spring elements with moderate stiffness of \( K_{B} = 5 \times 10^{6} \,{\text{N/m}} \), the gap size of \( d = 0.1\,{\text{m}} \) should be ensured (see Fig. 5). In the case of spring elements with large stiffness of \( K_{B} = 8 \times 10^{7} {\text{ N/m}} \), the in-between gap size can be reduced to nearly zero.
4 Buildings linked by dashpot elements
In this section, let us consider the case when two three-storey buildings are linked at each storey level by dashpot elements (see Fig. 7). The dynamic equation of motion under earthquake excitation for the model shown in Fig. 7 can be written as (compare Cimellaro and Lopez-Garcia 2011 as well as Eqs. 1 and 2):
where \( {\ddot{x}}_{i}^{L} (t) \), \( {\ddot{x}}_{i}^{R} (t) \), \( \dot{x}_{i}^{L} (t) \), \( \dot{x}_{i}^{R} (t) \), \( x_{i}^{L} (t) \), \( x_{i}^{R} (t) \) \( (i = 1,\ldots,3) \) is the acceleration, velocity and displacement of a single storey of the left (upper index L) and the right (upper index R) building, respectively; \( m_{i}^{L} \), \( m_{i}^{R} \) stand for the storey masses; \( K_{i}^{L} \), \( C_{i}^{L} \), \( K_{i}^{R} \), \( C_{i}^{R} \) are structural stiffness and damping coefficients; \( C_{B} \) denotes damping coefficient of dashpot elements and \( {\ddot{x}}_{g} (t) \) is the acceleration of input ground motion. It should be underlined that the above equation of motion is only valid for such values of damping coefficient of dashpot elements which are large enough to prevent structural pounding for the specified gap size between buildings.

Model of adjacent three-storey buildings linked by dashpot elements
Similarly as previously, the earthquake-induced response of two three-storey buildings with different (substantially different) dynamic properties has been analyzed. The damping coefficient of dashpot elements, \( C_{B} \), has been considered to vary from 0 to \( 8 \times 10^{6} {\text{ kg/s}} \). The time-stepping Newmark method with constant time step \( \Delta t = 0. 0 0 2\;{\text{s}} \) has been used in order to solve the equation of motion (3) numerically. Different earthquake records (see Table 1 for details) have been considered in the analysis. The representative examples of the results for the El Centro earthquake are presented in Figs. 8, 9 and 10. Figure 8 shows the peak displacements of the third storeys of both buildings with respect to damping of dashpot elements, as the results of parametric study. Additionally, the displacement time histories for all storeys of both buildings for two chosen values of \( C_{B} = 5 \times 10^{4} {\text{ kg/s}} \) (moderate damping) and \( C_{B} = 8 \times 10^{6} {\text{ kg/s}} \) (large damping inducing in-phase vibrations) are presented in Figs. 9 and 10, respectively.

Peak displacements of the third storeys of buildings with respect to damping of linking dashpot elements

Displacement time histories for buildings linked by dashpot elements with \( C_{B} = 5 \times 10^{4} \,{\text{kg/s}} \): a first storeys, b second storeys, c third storeys

Displacement time histories for buildings linked by dashpot elements with \( C_{B} = 8 \times 10^{6} \,{\text{kg/s}} \): a first storeys, b second storeys, c third storeys
It can be seen from Fig. 8a that with the initial increase in the damping coefficient value, a significant reduction in the peak displacements of the left building (lighter and more flexible one) has been obtained. However, after passing some threshold value, with further increase in damping coefficient, the response of the structure is nearly unchanged. In the case when damping of link elements is equal to zero, buildings are not connected and move out-of-phase with the response shown in Fig. 2 (peak displacement values for all stories have been given in the previous section). For high damping values of dashpot elements (buildings are fully connected and move in-phase with the response shown in Fig. 10), the obtained peak displacements of the structure are as small as: 0.0089, 0.0155 and 0.0190 m for the first, second and third storey, respectively. The above values for the left building show significant reductions in the peak displacements, equal to 85, 86 and 87 % respectively, in the case when two cases are compared. On the other hand, it can be seen from Fig. 8b that applying the additional dashpot elements between structures does not really change the response of the right building (heavier and stiffer one). The differences between the case of independent vibrations (dashpot damping is equal to zero) and stiff linking (high value of dashpot damping) in the case of this building is as small as: 2.3, 2.0 and 2.1 % for the first, second and third storey, respectively. It can also be seen from Figs. 9 and 10 that linking two buildings by dashpot elements leads to the significant reduction in gap size value required to prevent pounding, similarly as in the case when spring elements are applied. By the use of dashpot elements with moderate damping of \( C_{B} = 5 \times 10^{4} {\text{ kg/s}} \), the gap size of \( d = 0.08\;{\text{m}} \) should be ensured (see Fig. 9). In the case of dashpot elements with large damping of \( C_{B} = 8 \times 10^{6} {\text{ kg/s}} \), the in-between gap size can be reduced to nearly zero.
5 Buildings linked by viscoelastic elements
A reasonable solution is to combine spring as well as dashpot link elements together. The dynamic equation of motion under earthquake excitation for the model of two three-storey buildings linked by such viscoelastic elements can be written as (compare Eqs. 2 and 3):
where all vectors and matrices of the above equation are defined in Eqs. (2) and (3). The parametric analysis has been conducted so as to verify the effectiveness of viscoelastic link elements in mitigation of pounding effects and reduction of structural vibrations. The investigation has been conducted for different values of spring stiffness and dashpot damping coefficients. When one parameter has been changed, the value of the second one has been kept constant. The following basic values have been considered in the analysis: \( K_{B} = 5 \times 10^{6} {\text{ N/m}} \), \( C_{B} = 5 \times 10^{4} {\text{ kg/s}} \). Different earthquake records (see Table 1 for details) have been considered in the analysis. The representative examples of the results of the study for the El Centro earthquake are presented Figs. 11, 12, 13, 14 and 15. In particular, Fig. 11 shows the peak displacements of the third storeys of both buildings with respect to stiffness of viscoelastic elements, while Fig. 12 presents the peak displacements of the third storeys of both buildings with respect to damping of viscoelastic elements. Additionally, the displacement time histories for all storeys of both buildings for the following pairs of stiffness and damping of link elements: \( K_{B} = 5 \times 10^{6} {\text{ N/m}} \) and \( C_{B} = 5 \times 10^{4} {\text{ kg/s}} \), \( K_{B} = 5 \times 10^{6} {\text{ N/m}} \) and \( C_{B} = 8 \times 10^{6} {\text{ kg/s}} \), \( K_{B} = 8 \times 10^{7} {\text{ N/m}} \) and \( C_{B} = 5 \times 10^{4} {\text{ kg/s}} \) are shown in Figs. 13, 14 and 15, respectively.

Peak displacements of the third storeys of buildings with respect to stiffness of linking viscoelastic elements with \( C_{B} = 5 \times 10^{4} \,{\text{kg/s}} \)

Peak displacements of the third storeys of buildings with respect to damping of linking viscoelastic elements with \( K_{B} = 5 \times 10^{6} {\text{ N/m}} \)

Displacement time histories for buildings linked by viscoelastic elements with \( K_{B} = 5 \times 10^{6} \,{\text{N/m}} \) and \( C_{B} = 5 \times 10^{4} \,{\text{kg/s}} \): a first storeys, b second storeys, c third storeys

Displacement time histories for buildings linked by viscoelastic elements with \( K_{B} = 5 \times 10^{6} \,{\text{N/m}} \) and \( C_{B} = 8 \times 10^{6} \,{\text{kg/s}} \): a first storeys, b second storeys, c third storeys

Displacement time histories for buildings linked by viscoelastic elements with \( K_{B} = 8 \times 10^{7} \,{\text{N/m}} \) and \( C_{B} = 5 \times 10^{4} \,{\text{kg/s}} \): a first storeys, b second storeys, c third storeys
The results shown in Figs. 11a and 12a indicate that with the initial increase in stiffness (damping) values, a decrease trend in the obtained top storey displacements of the left building has been observed. Then, with further increase in the analyzed parameter, the peak storey displacements remain nearly unchanged showing significant reduction. Such results could be expected based on previous findings described in Sects. 2 and 3. It should be underlined, however, that the application of viscoelastic elements reduces the peak displacements of the lighter and more flexible structure at lower stiffness and damping values comparing to the case of spring and dashpot elements applied alone (compare especially Figs. 4a with 11a). On the other hand, the results from Figs. 11b and 12b show insignificant changes in the behaviour of the right building. Moreover, the peak displacements for this heavier and stiffer building show quite similar results as those obtained for spring and dashpot elements applied alone (compare Figs. 4b with 11b as well as Figs. 8b with 12b). It can also be seen from Figs. 13, 14 and 15 that linking two buildings with viscoelastic elements results in significant reduction in gap size value required to prevent pounding, similarly as in the case when spring as well as dashpot elements are applied. By the use of viscoelastic elements with moderate stiffness of \( K_{B} = 5 \times 10^{6} {\text{ N/m}} \) and moderate damping of \( C_{B} = 5 \times 10^{4} {\text{ kg/s}} \), the gap size of \( d = 0.07\;{\text{m}} \) should be ensured (see Fig. 13). In the case of viscoelastic elements with large stiffness of \( K_{B} = 8 \times 10^{7} {\text{ N/m}} \) or large damping of \( C_{B} = 8 \times 10^{6} {\text{ kg/s}} \), the in-between gap size can be reduced to nearly zero.
6 Conclusions
The investigation on the effectiveness of connecting two adjacent three-storey buildings by link elements, as a strategy for mitigation of earthquake-induced structural pounding, has been presented in this paper. Applying the discrete three-degree-of-freedom numerical models of buildings with different (substantially different) dynamic properties, three cases have been studied. In the first one, spring elements have been applied as links at all the storey levels, link elements in the form of dashpots have been considered in the second one, whereas the third case deals with the application of viscoelastic elements combining both springs and dashpots.
The results of the study clearly indicate that connecting the structures by additional link elements can be very beneficial for the left building (lighter and more flexible one), for which its behaviour can be substantially improved. The largest decrease in the response of the structure has been obtained for link elements with large stiffness or damping values, which stands for the case when two buildings are fully connected and vibrate in-phase. Moreover, by comparing the effectiveness of different types of link elements, it has been confirmed that the use of viscoelastic elements reduces the peak displacement of the lighter and more flexible structure at lower stiffness and damping values comparing to the case when spring or dashpot elements are applied alone. On the other hand, the results of the study demonstrate that applying the additional link elements does not really change the response of the right building (heavier and stiffer one). In the case of this structure, the differences in the responses without and with link elements (even those with large stiffness or damping values) are negligible. The final conclusion of the study indicates that connecting two buildings by additional link elements allows us to reduce the in-between gap size substantially while structural pounding can be still prevented.
The numerical simulations help the engineers to select the appropriate parameters in terms of stiffness and damping coefficients that fulfil the desired mitigation strategy in the case of practical application of link devices. The installation process of the devices requires fixing some supporting tools in both structures at specified locations (see the example described by Pratesi et al. 2014). These tools may include steel plates and flanges in which the link elements are fastened. Anchor bolts for fixing the steel plates in the reinforced concrete portions might be required. These anchor bolts have to be designed so as to be capable of withstanding the exerted forces during the earthquake. Then, the additional link elements can be connected to the steel plates through bars. These bars should be screwed to both ends of the steel plates. It is worth noting that the link elements can be used to connect newly constructed buildings as well as to retrofit old structures (Pratesi et al. 2014).
In the study described in this paper, an example concerning two adjacent equal height buildings with different (substantially different) dynamic properties has been considered. Therefore, further investigations are required, which should be focused on different configurations of structures, i.e. with different number of storeys and dynamic properties. The analysis should also include the case of adjacent buildings which have unequal floor levels and the slabs of one structure hit the columns of the other. This situation may result in the development of critical shear state in columns, since the demands of flexural ductility can more safely be satisfied (Karayannis and Favvata 2005a, b). Therefore, the application of link elements for buildings with unequal floor levels is possible under the condition of achieving the requirements of avoiding shear failure in columns likely to undergo contact.
References
Abdel Raheem SE (2014) Mitigation measures for earthquake induced pounding effects on seismic performance of adjacent buildings. Bull Earthq Eng 12:1705–1724
Anagnostopoulos SA (1988) Pounding of buildings in series during earthquakes. Earthq Eng Struct Dyn 16:443–456
Anagnostopoulos SA (1996) Building pounding re-examined: how serious a problem is it? Eleventh world conference on earthquake engineering. Acapulco, Mexico, 23–28 June 1996, paper no. 2108
Anagnostopoulos SA, Karamaneas CE (2008) Use of collision shear walls to minimize seismic separation and to protect adjacent buildings from collapse due to earthquake-induced pounding. Earthq Eng Struct Dyn 37:1371–1388
Anagnostopoulos SA, Spiliopoulos KV (1992) An investigation of earthquake induced pounding between adjacent buildings. Earthq Eng Struct Dyn 21:289–302
Cimellaro GP, Lopez-Garcia D (2011) Algorithm for design of controlled motion of adjacent structures. Struct Control Health Monit 18:140–148
ECS (1998) Eurocode 8: design provisions for earthquake resistance of structures. European Committee for Standardization, Brussels
Falborski T, Jankowski R (2013) Polymeric bearings—a new base isolation system to reduce structural damage during earthquakes. Key Eng Mater 569–570:143–150
Falborski T, Jankowski R, Kwiecień A (2012) Experimental study on polymer mass used to repair damaged structures. Key Eng Mater 488–489:347–350
IBC (2009) International building code. International Code Council Inc, Kansas
IS (2002) Indian standard criteria for earthquake resistant design of structures. IS 1893–2002. Bureau of Indian standards, India
Jankowski R (2005) Impact force spectrum for damage assessment of earthquake-induced structural pounding. Key Eng Mater 293–294:711–718
Jankowski R (2007a) Assessment of damage due to earthquake-induced pounding between the main building and the stairway tower. Key Eng Mater 347:339–344
Jankowski R (2007b) Theoretical and experimental assessment of parameters for the non-linear viscoelastic model of structural pounding. J Theor Appl Mech 45:931–942
Jankowski R (2008) Earthquake-induced pounding between equal height buildings with substantially different dynamic properties. Eng Struct 30:2818–2829
Jankowski R (2015) Pounding between superstructure segments in multi-supported elevated bridge with three-span continuous deck under 3D non-uniform earthquake excitation. J Earthq Tsunami 9(4):1550012
Jeng V, Tzeng WL (2000) Assessment of seismic pounding hazard for Taipei City. Eng Struct 22:459–471
Jeng V, Kasai K, Maison BF (1992) A spectral difference method to estimate building separations to avoid pounding. Earthq Spectra 8:201–223
Karayannis CG, Favvata MJ (2005a) Earthquake-induced interaction between adjacent reinforced concrete structures with non-equal heights. Earthq Eng Struct Dyn 34:1–20
Karayannis CG, Favvata MJ (2005b) Inter-story pounding between multistory reinforced concrete structures. Struct Eng Mech 20:505–526
Kasai K, Maison BF (1997) Building pounding damage during the 1989 Loma Prieta earthquake. Eng Struct 19:195–207
Kasai K, Jeng V, Patel PC, Munshi JA, Maison BF (1992) Seismic pounding effects—survey and analysis. In: Proceedings of the 10th world conference on earthquake engineering, vol 7. Madrid, Spain, 19–24 July 1992, pp 3893–3898
Kelly JM (1993) Earthquake-resistant design with rubber. Springer, London
Kobori T, Yamada T, Takenaka Y, Maeda Y, Nishimura I (1988) Effect of dynamic tuned connector on reduction of seismic response-application to adjacent office buildings. In: Proceedings of ninth world conference on earthquake engineering, vol 5. Tokyo–Kyoto, Japan, 2–9 Aug 1988, pp 773–778
Komodromos P (2000) Seismic isolation of earthquake-resistant structures. WIT Press, Southampton
Komodromos P (2008) Simulation of the earthquake-induced pounding of seismically isolated buildings. Comput Struct 86:618–626
Lin J-H, Weng C-C (2001a) Probability analysis of seismic pounding of adjacent buildings. Earthq Eng Struct Dyn 30:1539–1557
Lin J-H, Weng C-C (2001b) Spectral analysis on pounding probability of adjacent buildings. Eng Struct 23:768–778
Lopez-Garcia L (2004) Separation between adjacent nonlinear structures for prevention of seismic pounding. In: 13th world conference on earthquake engineering. Vancouver, Canada, 1–6 Aug 2004, p 478
Luco JE, De Barros FCP (1998) Optimal damping between two adjacent elastic structures. Earthq Eng Struct Dyn 27:649–659
Mahmoud S, Gutub S (2013) Earthquake induced pounding-involved response of base-isolated buildings incorporating soil flexibility. Adv Struct Eng 16:71–90
Mahmoud S, Jankowski R (2009) Elastic and inelastic multi-storey buildings under earthquake excitation with the effect of pounding. J Appl Sci 9:3250–3262
Mahmoud S, Jankowski R (2011) Modified linear viscoelastic model of earthquake-induced structural pounding. Iran J Sci Technol 35(C1):51–62
Mahmoud S, Austrell P-E, Jankowski R (2012) Simulation of the response of base-isolated buildings under earthquake excitations considering soil flexibility. Earthq Eng Eng Vib 11:359–374
Mahmoud S, Abd-Elhamed A, Jankowski R (2013) Earthquake-induced pounding between equal height multi-storey buildings considering soil-structure interaction. Bull Earthq Eng 11:1021–1048
Maison BF, Kasai K (1990) Analysis for type of structural pounding. J Struct Eng 116:957–977
Maison BF, Kasai K (1992) Dynamics of pounding when two buildings collide. Earthq Eng Struct Dyn 21:771–786
Maison BF, Ventura CE (1992) Seismic analysis of base-isolated San Bernardino County building. Earthq Spectra 8:605–633
Malhotra PK (1997) Dynamics of seismic impacts in base-isolated buildings. Earthq Eng Struct Dyn 26:797–813
Naderpour H, Barros RC, Khatami SM, Jankowski R (2016) Numerical study on pounding between two adjacent buildings under earthquake excitation. Shock Vib 2016:1504783. doi:10.1155/2016/1504783
Naeim F, Kelly JM (1999) Design of seismic isolated structures: from theory to practice. Wiley, New York
NBC (2003) National building code, technical standard of building E.030. Earthquake resistant design. Ministry of Housing, Peru
Newmark N (1959) A method of computation for structural dynamics. J Eng Mech Div ASCE 85:67–94
Ni YQ, Ko JM, Ying ZG (2001) Random seismic response analysis of adjacent buildings coupled with non-linear hysteretic dampers. J Sound Vib 246:403–417
Penzien J (1997) Evaluation of building separation distance required to prevent pounding during strong earthquakes. Earthq Eng Struct Dyn 26:849–858
Polycarpou PC, Komodromos P (2010a) Earthquake-induced poundings of a seismically isolated building with adjacent structures. Eng Struct 32:1937–1951
Polycarpou PC, Komodromos P (2010b) On poundings of a seismically isolated building with adjacent structures during strong earthquakes. Earthq Eng Struct Dyn 39:933–940
Polycarpou PC, Komodromos P, Polycarpou AC (2013) A nonlinear impact model for simulating the use of rubber shock absorbers for mitigating the effects of structural pounding during earthquakes. Earthq Eng Struct Dyn 42:81–100
Pratesi F, Terenzi S, Sorace G (2014) Analysis and mitigation of seismic pounding of a slender R/C bell tower. Eng Struct 71:23–34
Rosenblueth E, Meli R (1986) The 1985 earthquake: causes and effects in Mexico City. Concr Int 8:23–34
Salomón O, Oller S, Barbat A (1999) Finite element analysis of base isolated buildings subjected to earthquake loads. Int J Numer Methods Eng 46:1741–1761
Sołtysik B, Jankowski R (2013) Non-linear strain rate analysis of earthquake-induced pounding between steel buildings. Int J Earth Sci Eng 6:429–433
Wasti ST, Ozcebe G (2003) Seismic assessment and rehabilitation of existing buildings. Kluwer Academic Publishers, Dordrecht
Westermo BD (1989) The dynamics of interstructural connection to prevent pounding. Earthq Eng Struct Dyn 18:687–699
Xu YL, He Q, Ko JM (1999) Dynamic response of damper-connected adjacent buildings under earthquake excitation. Eng Struct 21:135–148
Yang Z, Xu YL, Lu XL (2003) Experimental seismic study of adjacent buildings with fluid dampers. J Struct Eng ASCE 129:197–205
Zhang WS, Xu YL (1999) Dynamic characteristics and seismic response of adjacent buildings linked by discrete dampers. Earthq Eng Struct Dyn 28:1163–1185
Zhang WS, Xu YL (2000) Vibration analysis of two buildings linked by Maxwell model-defined fluid dampers. J Sound Vib 233:775–796
Zhu H, Iemura H (2000) A study of response control on the passive coupling element between two parallel structures. Struct Eng Mech 9:383–396
Zhu HP, Xu YL (2005) Optimum parameters of Maxwell model-defined dampers used to link adjacent structures. J Sound Vib 279:253–274
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Jankowski, R., Mahmoud, S. Linking of adjacent three-storey buildings for mitigation of structural pounding during earthquakes. Bull Earthquake Eng 14, 3075–3097 (2016). https://doi.org/10.1007/s10518-016-9946-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10518-016-9946-z