
Abstract
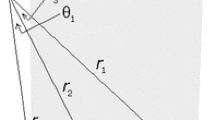
It is a well known classical result that given the image projections of three known world points it is possible to solve for the pose of a calibrated perspective camera to up to four pairs of solutions. We solve the Generalised problem where the camera is allowed to sample rays in some arbitrary but known fashion and is not assumed to perform a central perspective projection. That is, given three back-projected rays that emanate from a camera or multi-camera rig in an arbitrary but known fashion, we seek the possible poses of the camera such that the three rays meet three known world points. We show that the Generalised problem has up to eight solutions that can be found as the intersections between a circle and a ruled quartic surface. A minimal and efficient constructive numerical algorithm is given to find the solutions. The algorithm derives an octic polynomial whose roots correspond to the solutions. In the classical case, when the three rays are concurrent, the ruled quartic surface and the circle possess a reflection symmetry such that their intersections come in symmetric pairs. This manifests itself in that the odd order terms of the octic polynomial vanish. As a result, the up to four pairs of solutions can be found in closed form. The proposed algorithm can be used to solve for the pose of any type of calibrated camera or camera rig. The intended use for the algorithm is in a hypothesise-and-test architecture.
Similar content being viewed by others

References
E. Adelson and J. Bergen, “The plenoptic function and the elements of early vision,” in Computational Models of Visual Processing, MIT Press, 1991, ISBN 0-262-12155-7.
T. Alter, “3-D pose from 3 points using weak perspective,” IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 16, No. 8, pp. 802–808, 1994.
P. Baker, R. Pless, C. Fermüller, and Y. Aloimonos, “Eyes from eyes,” SMILE 2001. LNCS 2018, 2001, pp. 204–217.
Euclid, The Elements.
O. Faugeras, Three-Dimensional Computer Vision: A Geometric Viewpoint, MIT Press, 1993, ISBN 0-262-06158-9.
M. Fischler and R. Bolles, “Random sample consensus: A paradigm for model fitting with application to image analysis and automated cartography,” Commun. Assoc. Comp. Mach., Vol. 24, pp. 381–395, 1981.
M. Grossberg and S. Nayar, “A general imaging model and a method for finding its parameters,” IEEE International Conference on Computer Vision, Vol. 2, pp. 108–115, 2001.
A. Gruen and T.S. Huang, Calibration and Orientation of Cameras in Computer Vision, Springer Verlag, 2001. ISBN 3-540-65283-3.
J. Grunert, “Das Pothenotische Problem in erweiterter Gestalt nebst über seine Anwendungen in der Geodäsie,” Grunerts Archiv für Mathematik und Physik, Vol. 1, pp. 238–248, 1841.
R. Haralick, C. Lee, K. Ottenberg, and M. Nölle, “Review and analysis of solutions of the three point perspective pose estimation problem,” International Journal of Computer Vision, Vol. 13, No. 3, pp. 331–356, 1994.
R. Hartley and A. Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2000, ISBN 0-521-62304-9.
D. Nistér, “An efficient solution to the five-point relative pose problem,” IEEE Conference on Computer Vision and Pattern Recognition, Vol. 2, pp. 195–202, 2003.
D. Nistér, “Preemptive RANSAC for Live Structure and Motion Estimation,” IEEE International Conference on Computer Vision, pp. 199–206, 2003.
R. Pless, “Using many cameras as one,” IEEE Conference on Computer Vision and Pattern Recognition, Vol. 2, pp. 587–593.
Author information
Authors and Affiliations
Corresponding author
Additional information
Prepared through collaborative participation in the Robotics Consortium sponsored by the U.S. Army Research Laboratory under the Collaborative Technology Alliance Program, Cooperative Agreement DAAD19-01-2-0012. The U.S. Government is authorized to reproduce and distribute reprints for Government purposes notwithstanding any copyright notation thereon.
This work was supported in part by the National Science Foundation under award number IIS-0545920, Faculty Early Career Development (CAREER) Program.
David Nistér received the MSc degree in computer science and engineering in 1997 and the Licentiate of Engineering degree in 1998, both from Chalmers University of Technology, Gothenburg, Sweden. In 2001 he received the PhD degree in computer vision, numerical analysis and computing science from the Royal Institute of Technology (KTH), Stockholm, Sweden, with the thesis ’Automatic Dense Reconstruction from Uncalibrated Video Sequences’. He is currently an assistant professor at the Computer Science Department and the Center for Visualization and Virtual Environments at the University of Kentucky. He was previously a researcher in the Vision Technologies Laboratory, Sarnoff Corporation, Princeton. geometry, He is the recipient of an NSF CAREER Award 2006, for Structure from Recognition, Building Visual Worlds, and a PI for the DARPA Urbanscape project on 3D Reconstruction from Video. He is co-chair for a work group of the International Society for Photogrammetry and Remote Sensing (ISPRS), and was an area-chair for CVPR 2006, and will be an area-chair for CVPR 2007 and ECCV 2008.
Henrik Stewénius received the MSc degree in Engineering physics in 2001, the Licentiate degree in mathematics in 2003 and the PhD degree in applied mathematics in 2005 with the thesis’ Gröbner Basis Methods for Minimal Problems in Computer Vision’, all from Lund University, Sweden. He is currently a postdoctoral associate at the Center for Visualization and Virtual Environments at the University of Kentucky. His research interests are in geometry and recognition. His work in geometry is centered on minimal cases for structure from motion.
Rights and permissions
About this article
Cite this article
Nistér, D., Stewénius, H. A Minimal Solution to the Generalised 3-Point Pose Problem . J Math Imaging Vis 27, 67–79 (2007). https://doi.org/10.1007/s10851-006-0450-y
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10851-006-0450-y