
Abstract
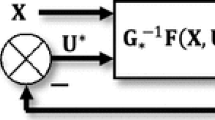
A combined adaptive fuzzy output feedback control scheme is presented for a class of multiple-input–multiple-output (MIMO) nonlinear systems with the unmeasured states. A state observer is used to estimate the unmeasured states of the systems. The resulting closed-loop system consists of the state observer and four control components, where the control components are the combined adaptive fuzzy controller, supervisory controller, H ∞ robust control item and auxiliary compensation item. Compared with the existing results in the observer design, the main advantages of this scheme are that (1) the combined adaptive fuzzy control item, which can trade off the fuzzy descriptions for controlled object rules and control action rules, is designed in the controller; (2) the proposed controller has the supervisory control performance. The stability of the closed-loop system is analyzed by using Lyapunov analysis method. Simulation results validate the effectiveness of the proposed control scheme.
Similar content being viewed by others

References
Sastry, S.S., Isidori, A.: Adaptive control of linearization systems. IEEE Trans. Autom. Control 34, 1123–1131 (1989)
Kanellakopoulos, I., Kokotovic, P.V., Morse, A.S.: Systematic design of adaptive controllers for feedback linearizable systems. IEEE Trans. Autom. Control 36, 1241–1253 (1991)
Jakubczyk, B.: Feedback linearization of discrete time systems. Syst. Control Lett. 9, 411–416 (1987)
Park, J., Sandberg, I.W.: Universal approximation using radial-basis-function network. Neural Comput. 3(2), 246–257 (1991)
Wang, L.X., Mendel, J.M.: Fuzzy basis function, universal approximation, and orthogonal least-square learning. IEEE Trans. Neural Netw. 3, 807–814 (1992)
Wang, L.X.: Stable adaptive fuzzy control of nonlinear systems. IEEE Trans. Fuzzy Syst. 1, 146–155 (1993)
Chen, B.S., Lee, C.H., Chang, Y.C.: H ∞ tracking design of uncertain nonlinear SISO systems: Adaptive fuzzy approach. IEEE Trans. Fuzzy Syst. 4, 32–43 (1996)
Li, T.S., Yang, Y.S., Hu, J.Q., Yang, L.J.: Robust adaptive fuzzy tracking control for a class of perturbed uncertain nonlinear systems with UVCGF. Int. J. Wavelets Multiresolut. Inf. Process. 5(6), 227–239 (2007)
Li, T.S., Zou, Z.J., Luo, W.L.: DSC-backstepping based robust adaptive NN control for nonlinear systems. Acta Autom. Sin. 34(11), 1424–1430 (2008)
Chang, Y.C.: Robust tracking control of nonlinear MIMO systems via fuzzy approaches. Automatica 36, 1535–1545 (2000)
Liu, Y.J., Wang, W.: Adaptive fuzzy control for a class of uncertain non-affine nonlinear systems. Inf. Sci. 177(18), 3901–3917 (2007)
Kim, Y.H., Lewis, F.L., Abdallah, C.T.: A dynamic recurrent neural-network based adaptive observer for a class of nonlinear systems. Automatica 33, 1539–1543 (1997)
Leu, Y.G., Lee, T.T., Wang, W.Y.: Observer-based adaptive fuzzy-neural control for unknown nonlinear dynamical systems. IEEE Trans. Syst. Cybern., Part B, Cybern. 29, 583–591 (1999)
Park, J.H., Park, G.T., Kim, S.H., Moon, C.J.: Direct adaptive self-structuring fuzzy controller for nonaffine nonlinear system. Fuzzy Sets Syst. 153, 429–445 (2005)
Li, H.X.: A hybrid adaptive fuzzy control for a class of nonlinear MIMO systems. IEEE Trans. Fuzzy Syst. 11(1), 1–11 (2003)
Tong, S.C., Li, H.X., Chen, G.R.: Adaptive fuzzy decentralized control for a class of large-scale nonlinear systems. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 34, 770–775 (2004)
Goleá, N., Goleá, A., Barra, K., Bouktir, T.: Observer-based adaptive control of robot manipulators: Fuzzy systems approach. Appl. Soft Comput. 8, 778–787 (2008)
Wang, C.H., Liu, H.L., Lin, T.C.: Direct adaptive fuzzy-neural control with state observer and supervisory controller for unknown nonlinear dynamical systems. IEEE Trans. Fuzzy Syst. 10(1), 39–49 (2002)
Wang, L.X.: Adaptive Fuzzy Systems and Control: Design and Stability Analysis. Prentice-Hall, Englewood Cliffs (1994)
Wang, W.Y., Leu, Y.G., Lee, T.T.: Output-feedback control of nonlinear systems using direct adaptive fuzzy-neural controller. Fuzzy Sets Syst. 140, 341–358 (2003)
Yousef, H., Hamdy, M., El-Madbouly, E., Eteim, D.: Adaptive fuzzy decentralized control for interconnected MIMO nonlinear subsystems. Automatica 45(2), 456–462 (2009)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kang, Q., Wang, W. Adaptive fuzzy controller design for a class of uncertain nonlinear MIMO systems. Nonlinear Dyn 59, 579–591 (2010). https://doi.org/10.1007/s11071-009-9565-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-009-9565-1