
Abstract
This paper presents a comprehensive study on a dynamic nonlinear anti-windup compensator (AWC) design for nonlinear systems. It is shown that for asymptotically stable nonlinear systems, a full-order internal model control (IMC)-based AWC always exists regardless of the nonlinearity type. An alternative decoupled-architecture-based AWC offering better performance is proposed, wherein the selection of a nonlinear dynamical component plays a key role in establishing an equivalent decoupled architecture. Using the decoupled architecture, a quadratic Lyapunov function, the Lipschitz condition, the sector condition, and L 2 gain reduction, a linear matrix inequality (LMI)-based AWC scheme is developed for systems with global Lipschitz nonlinearities. And by means of the local sector condition, a decoupled-architecture-based local AWC scheme (utilizing LMIs) for unstable and chaotic systems, which simultaneously guarantees a region of stability and the closed-loop performance for tracking-control applications, is derived. Simulation results establishing the effectiveness of the proposed AWC schemes are provided.




Similar content being viewed by others
References
Rajamani, R.: Observers for Lipschitz nonlinear systems. IEEE Trans. Autom. Control 43, 397–401 (1998)
Lin, K.-J.: Stabilization of uncertain fuzzy control systems via a new descriptor system approach. Comput. Math. Appl. 64, 1170–1178 (2012)
Wang, M., Ge, S.S., Hong, K.-S.: Approximation-based adaptive tracking control of pure-feedback nonlinear systems with multiple unknown time-varying delays. IEEE Trans. Neural Netw. 21, 1804–1816 (2010)
Aqil, M., Hong, K.-S., Jeong, M.-Y.: Synchronization of coupled chaotic FitzHugh–Nagumo systems. Commun. Nonlinear Sci. Numer. Simul. 17, 1615–1627 (2012)
Tarbouriech, S., Turner, M.C.: Anti-windup design: an overview of some recent advances and open problems. IET Control Theory Appl. 3, 1–19 (2009)
Chen, Y., Fei, S., Zhang, K.: Stabilization of impulsive switched linear systems with saturated control input. Nonlinear Dyn. 69, 793–804 (2012)
Nguyen, T., Jabbari, F.: Output feedback controller for disturbance attenuation with actuator amplitude and rate saturation. Automatica 36, 1339–1346 (2000)
Wang, X., Saberi, A., Grip, H.F., Stoorvogel, A.A.: Simultaneous external and internal stabilization of linear systems with input saturation and non-input-additive sustained disturbances. Automatica 48, 2633–2639 (2012)
Park, B.Y., Yun, S.W., Park, P.G.: H-2 state-feedback control for LPV systems with input saturation and matched disturbance. Nonlinear Dyn. 67, 1083–1096 (2012)
Edwards, C., Postlethwaite, I.: An anti-windup scheme with closed-loop stability considerations. Automatica 35, 761–765 (1999)
Mulder, E.F., Kothare, M.V., Morari, M.: Multivariable anti-windup controller synthesis using linear matrix inequalities. Automatica 37, 1407–1416 (2001)
Forni, F., Galeani, S.: Gain-scheduled, model-based anti-windup for LPV systems. Automatica 46, 222–225 (2010)
Yang, S.-K.: Observer-based anti-windup compensator design for saturated control systems using an LMI approach. Comput. Math. Appl. 64, 747–758 (2012)
Turner, M.C., Herrmann, G., Postlethwaite, I.: Incorporating robustness requirements into anti-windup design. IEEE Trans. Autom. Control 52, 1842–1854 (2007)
Rehan, M., Ahmed, A., Iqbal, N., Hong, K.-S.: Constrained control of hot air blower system under output delay using globally stable performance-based anti-windup approach. J. Mech. Sci. Technol. 24, 2413–2420 (2010)
Kendi, T.A., Doyle, F.J. III: An anti-windup scheme for multivariable nonlinear systems. J. Process Control 7, 329–343 (1997)
Morabito, F., Teel, A.R., Zaccarian, L.: Nonlinear antiwindup applied to Euler–Lagrange systems. IEEE Trans. Robot. Autom. 20, 526–537 (2004)
Yoon, S.-S., Park, J.-K., Yoon, T.-W.: Dynamic anti-windup scheme for feedback linearizable nonlinear control systems with saturating inputs. Automatica 44, 3176–3180 (2008)
Zheng, A., Kothare, M.V., Morari, M.: Anti-windup design for internal model control. Int. J. Control 60, 1015–1024 (1994)
Weston, P.F., Postlethwaite, I.: Linear conditioning for systems containing saturating actuators. Automatica 36, 1347–1354 (2000)
Rehan, M., Ahmed, A., Iqbal, N.: Static and low order anti-windup synthesis for cascade control systems with actuator saturation: an application to temperature-based process control. ISA Trans. 49, 293–301 (2010)
Herrmann, G., Menon, P.P., Turner, M.C., Bates, D.G., Postlethwaite, I.: Anti-windup synthesis for nonlinear dynamic inversion control schemes. Int. J. Robust Nonlinear Control 20, 1465–1482 (2010)
Teel, A.R., Kapoor, N.: Uniting local and global controllers. In: Proc. of European Contr. Conf., Brussels, Belgium (1997). CD-ROM
Tarbouriech, S., Prieur, C., Gomes-da-Silva-Jr, J.M.: Stability analysis and stabilization of systems presenting nested saturations. IEEE Trans. Autom. Control 51, 1364–1371 (2006)
Lee, S.M., Kwon, O.M., Park, J.H.: Regional asymptotic stability analysis for discrete-time delayed systems with saturation nonlinearity. Nonlinear Dyn. 67, 885–892 (2012)
Rehan, M.: Synchronization and anti-synchronization of chaotic oscillators under input saturation. Appl. Math. Model. (2013). doi:10.1016/j.apm.2013.02.023
Lin, D., Wang, X., Yao, Y.: Fuzzy neural adaptive tracking control of unknown chaotic systems with input saturation. Nonlinear Dyn. 67, 2889–2897 (2012)
Rehan, M., Hong, K.-S., Ge, S.S.: Stabilization and tracking control for a class of nonlinear systems. Nonlinear Anal., Real World Appl. 12, 1786–1796 (2011)
Puebla, H., Alvarez-Ramirez, J., Cervantes, I.: A simple tracking control for Chua’s circuit. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 50, 280–284 (2003)
Acknowledgements
This research was supported by the World Class University program through the National Research Foundation of Korea funded by the Ministry of Education, Science and Technology, Republic of Korea (grant no. R31-20004 and MEST-2012-R1A2A2A01046411).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: AWC parameterization for complex nonlinear systems
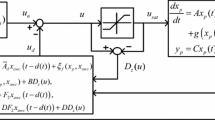
Consider a general nonlinear system given by

where the functions \(g(x_{p},u_{\operatorname {sat}}) \in R^{n}\) and \(l(x_{p},u_{\operatorname {sat}}) \in R^{p}\) represent time-varying nonlinearities. The decoupled-architecture-based AWC parameterization is given by

where F∈R m×n and h(x p ,x aw)∈R m are the unknown components of the AWC that can be selected to achieve the desired AWC performance. This parameterization is determined in the same way as described in Sect. 4. The corresponding IMC-based AWC can be obtained by Fx aw+h(x p ,x aw)=0, which always exists for an asymptotically stable system (A.1).
Appendix B: Nonlinear matrix inequality-based AWC design
Consider the AWC parameterization, for a nonlinear system (1), given by

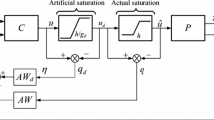
where nonlinearity h(x p ,x aw)∈R m represents a time-varying vector. By replacing Fx aw with Fx aw+h(x p ,x aw) in Figs. 2 and 3, a full-order AWC architecture and its equivalent decoupled architecture can be obtained for this parameterization. To design an AWC for a nonlinear system (1) using the parameterization (B.1), consider a Lyapunov function
where γ is a constant and \(\bar{V}(x_{\mathrm{aw}}) \in R\) is any positive definite function; for example, the extended quadratic Lyapunov function provided in [22].
Theorem B.1
Consider an overall closed-loop system, formed by plant (1), controller (3) and AWC (B.1), satisfies Assumption 1. Suppose there exists a matrix F∈R m×n and a function h(x p ,x aw)∈R m. Consider the optimization problem
such that

where


γ is a scalar, and matrix U∈R m×m is a diagonal. The, the following holds:
-
(i)
There exists an AWC for an asymptotically stable plant (1) that ensures stability and windup prevention for the overall closed-loop system.
-
(ii)
The decoupled nonlinear part from u n to y d is asymptotically stable if u n =0.
-
(iii)
The L 2 gain from u n to y d is less than γ if u n ≠0.
Proof
If Fx aw+h(x p ,x aw)=0, then the AWC parameterization (B.1) becomes the same as the IMC-based AWC; hence, (i) is easily followed. The inequality (17) ensures (ii) and (iii). For Lyapunov function (B.2), the inequality (17) for AWC parameterization (B.1) gives \(J_{1} = \bar{Z}^{T}\varPi _{3}\bar{Z} < 0\), where
Sector condition (4) can be written as \(\bar{Z}^{T}\varPi _{4}\bar{Z} \ge 0\), where
Combining (B8) and (B9) through the S-procedure (Π=Π 3+εΠ 4<0 with ε>0), taking v=εW and further applying the Schur complement followed by the congruence transform with \(\operatorname {diag}(I,v^{ - 1},I,I)\), and taking v −1=U>0, (B.3)–(B.6) are obtained. This completes the proof of Theorem B.1. □
The results proposed in Theorem B.1 can be extended for oscillatory, unstable and chaotic locally Lipschitz and non-Lipschitz nonlinear systems by using the local sector condition. Due to its importance in nonlinear science, the final nonlinear matrix inequalities, by using the local sector condition (25)–(26) with u=u n −Fx aw−h(x p ,x aw) and w=u n +Gx aw−h(x p ,x aw), are given by



which can be used for the local AWC design of a nonlinear system (1) not verifying Assumption 2. These matrix inequalities are derived by utilizing the similar steps as was followed for the proofs of Theorems 2 and B.1.
Rights and permissions
About this article
Cite this article
Rehan, M., Hong, KS. Decoupled-architecture-based nonlinear anti-windup design for a class of nonlinear systems. Nonlinear Dyn 73, 1955–1967 (2013). https://doi.org/10.1007/s11071-013-0916-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-0916-6