
Abstract
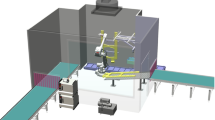
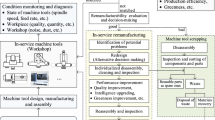
Remanufacturing system is a term of green system project which conforms to the national sustainable development strategy. With the demand of the high adaptability of the varieties of waste machining parts, the short product cycle, the low machining cost and the high product quality are offered. Each step of the remanufacturing system from the beginning of the scanning to the accomplishment of the welding was investigted. Aiming at building a remanufacturing system based on totally automatic MIG surfacing via robot, advanced information technology, remanufacturing technology and management, through the control of the pretreatment and the optimization to minimize the time of remanufacturing and realize the remanufacturing on the terminal products of varieties, were applied. The steps mainly incude: 1) using the visual sensor which is installed at the end of the Robot to rapidly get the outline data of the machining part and the pretreatment of the data; 2) rebuilding the curved surface based on the outline data and the integrated CAD material object model; 3) building the remanufacturing model based on the CAD material object model and projecting the remanufacturing process; and 4) accomplishing the remanufacture of the machining part by the technology of MIG surfacing.
Similar content being viewed by others

References
Academy of Armored Forces Engineering. Research work of Academician Xu Bin-shi [M]. Beijing: Mechanical Engineering Press, 2001.
Faig W. Calibration of close-range photogrammetric systems: mathematical formulation [J]. Photogrammetric Eng Remote Sensing, 1975, 41(12): 1479–1486.
MA Shi-ning, LIU Shi-can, ZHANG Wei. The green remanufacture toward the 21st century [J]. Chinese Surfacing Engineering, 1999, 12(4): 1–4.
Rantoul A H, Mullinenx G, Medland A J. Interpretation of errors from inspection results [J]. Computer Integrated Manufacturing Systems, 1994, 1(3): 173–178.
Cegielski P, Kolasa A, Sarnowski T. Robot Surfacing for Rebuilding Worn Machine Parts with the Application of Adaptive Control[M]. Wroclaw: Wroclaw University of Technology Publishing Office, 2000. 35–38.
JIN Tao, TONG Shui-guan, YAN Yong-nian. Reversal Engineering Technology [M]. Beijing: Mechanical Engineering Press, 2003.
ZHOU Fu-qiang, ZHU Ji-gui, YANG Xue-you. The rapid calibration technology of CCD camera [J]. Optics Precise Engineering, 2000, 8(1): 6–100.
LIU Zhi-hua. The Measurement of the Scanned Outline Curve Surface [D]. Changchun: Optics Precision Engineering Institute of Changchun, 1998.
ZHAO Hong, SONG Yuan-he, LI Gen-qian, et al. A new kind of 360° 3d outline technology [J]. Laser and Infrared, 1998, 19(4): 497–500.
ZHOU Hui-cheng, CHEN Ji-hong, WANG Ping-jiang, et al. The rapid measurement by the laser source [J]. The Measuring Technology, 1998, 7: 6–8.
ZHAO Chun-chun. The Introduction of Figure Image Manipulation [M]. Xi’an: The Publishing Company of Northwest Industry College, 1995.
ZHANG Yu-jin. The Manipulation and Analysis of the Image [M]. Beijing: The Publishing Company of Qinghua University, 1995.
Pfeifer T. Task-specific gauge for the inspection of coordinate measuring machines [J]. Annals of the CIRP, 1994, 43(1): 465–468.
JIA Yun-de. The Vision of the Machinery[M]. Beijing: Science Press, 2000.
ZHANG Bei-wei. The Calibration of the Camera[D]. Hefei: Anhui University, 2001.
Author information
Authors and Affiliations
Corresponding author
Additional information
Foundation item: Projects(50075086; 50235030) supported by the National Natural Science Foundation of China; Project(413270103) supported by the National Basic Research Foundation of China; Project(2000-476) supported by the Ministry of Education for the Outstanding Teachers
Rights and permissions
About this article
Cite this article
Zhu, S., Guo, Yc. & Yang, P. Remanufacturing system based on totally automatic MIG surfacing via robot. J Cent. South Univ. Technol. 12, 129–132 (2005). https://doi.org/10.1007/s11771-005-0024-y
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/s11771-005-0024-y