
Abstract
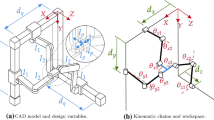
k]A design and optimization approach of dynamic and control performance for a two-DOF planar manipulator was proposed. After the kinematic and dynamic analysis, several advantages of the mechanism were illustrated, which made it possible to obtain good dynamic and control performances just through mechanism optimization. Based on the idea of design for control (DFC), a novel kind of multi-objective optimization model was proposed. There were three optimization objectives: the index of inertia, the index describing the dynamic coupling effects and the global condition number. Other indexes to characterize the designing requirements such as the velocity of end-effector, the workspace size, and the first mode natural frequency were regarded as the constraints. The cross-section area and length of the linkages were chosen as the design variables. NSGA-II algorithm was introduced to solve this complex multi-objective optimization problem. Additional criteria from engineering experience were incorporated into the selecting of final parameters among the obtained Pareto solution sets. Finally, experiments were performed to validate the linear dynamic structure and control performances of the optimized mechanisms. A new expression for measuring the dynamic coupling degree with clear physical meaning was proposed. The results show that the optimized mechanism has an approximate decoupled dynamics structure, and each active joint can be regarded as a linear SISO system. The control performances of the linear and nonlinear controllers were also compared. It can be concluded that the optimized mechanism can achieve good control performance only using a linear controller.
Similar content being viewed by others


References
DASGUPTA B, MRUTHYUNJAYA T S. The Stewart platform manipulator: A review [J]. Mechanism and Machine Theory, 2000, 35(1): 15–40.
LI Yang-min, XU Qing-song. Kinematics and inverse dynamics analysis for a general 3-PRS spatial parallel mechanism [J]. Robotica, 2005, 23(2): 219–229.
PIETSCH I T, KREFFT M, BECKER O T, BIER C C, HESSELBACH J. How to reach the dynamic limits of parallel robots? An autonomous control approach [J]. IEEE Transactions on Automation Science and Engineering, 2005, 2(4): 369–380.
YANG Zhi-yong, WU Jiang, MEI Jiang-ping. Motor-mechanism dynamic model based neural network optimized computed torque control of a high speed parallel manipulator [J]. Mechatronics, 2007, 17(7): 381–390.
CACCAVALE F, SICILIANO B, VILLANI L. The tricept robot: Dynamics and impedance control [J]. IEEE-ASME Transactions on Mechatronics, 2003, 8(2): 263–268.
YAMANE K, NAKAMURA Y, OKADA M, KOMINE N, YOSHIMOTO K. Parallel dynamics computation and H infinity acceleration control of parallel manipulators for acceleration display [J]. Journal of Dynamic Systems Measurement and Control-Transactions of the ASME, 2005, 127(2): 185–191.
LI Qing, ZHANG W J, CHEN L. Design for control-A concurrent engineering approach for mechatronic systems design [J]. IEEE-ASME Transactions on Mechatronics, 2001, 6(2): 161–169.
LI Qing. Experimental validation on the integrated design and control of a parallel robot [J]. Robotica, 2006, 24(2): 173–181.
KOSINSKA A, GALICKI M, KEDZIOR K. Designing and optimization of parameters of delta-4 parallel manipulator for a given workspace [J]. Journal of Robotic Systems, 2003, 20(9): 539–548.
LIU Xin-jun, WANG Jin-song, PRITSCHOW G. On the optimal kinematic design of the Prrrp 2-dof parallel mechanism [J]. Mechanism and Machine Theory, 2005, 41(9): 1111–1130.
HWANG Y K. The optimum design of a 6-dof parallel manipulator with large orientation workspace [C]// Proceedings of IEEE International Conference on Robotics and Automation. Roma: IEEE, 2007: 163–168.
PIRAS G, CLEGHORN W L, MILLS J K. Dynamic finite-element analysis of a planar high-speed, high-precision parallel manipulator with flexible links [J]. Mechanism and Machine Theory, 2005, 40(7): 849–862.
WANG Xiao-yun, MILLS J K. Dynamic modeling of a flexible-link planar parallel platform using a substructuring approach [J]. Mechanism and Machine Theory, 2006, 41(6): 671–687.
DEB K, PRATAP A, AGARWAL S, MEYARIVAN T. A fast and elitist multiobjective genetic algorithm: Nsga-Ii [J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182–197.
TOUMI K Y. Analysis, design and control of direct-drive manipulators [D]. Massachusetts: Massachusetts Institute of Technology, 1985.
GROTJAHN M, HEIMANN B. Model-based feedforward control in industrial robotics [J]. International Journal of Robotics Research, 2002, 21(1): 45–60.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Foundation item: Project(2009AA04Z216) supported in part by the National High Technology Research and Development Program of China; Project(2009ZX04013-011) supported by the National Science and Technology Major Program of China; Project(20092302120068) supported by the Doctoral Program of Higher Education of China
Rights and permissions
About this article
Cite this article
You, W., Kong, Mx., Sun, Ln. et al. Optimal design of dynamic and control performance for planar manipulator. J. Cent. South Univ. Technol. 19, 108–116 (2012). https://doi.org/10.1007/s11771-012-0979-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11771-012-0979-4