
Abstract
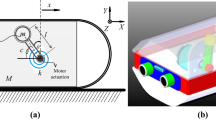
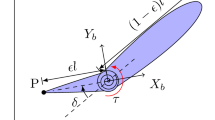
Motivated by the desire to optimally control the friction-induced stick-slip locomotion and sufficiently improve the energy efficacy, a novel trajectory synthesis and optimization scheme is proposed in this paper for a underactuated microrobotic system with dynamic constraints and couplings. The nonlinear microrobotic model utilizes combined tangential-wise and normal-wise vibrations for underactuated locomotion, which features a generic significance for the studies on microrobotic systems. Specifically, an analytical two-stage velocity trajectory is constructed under control indexes and physical constraints. Subsequently, the dynamic coupling behavior and the qualitative variation laws are characterized through rigorous bifurcation analysis. The synthesized trajectory is optimized and tuned via rigorous analysis based on the robot dynamics. The proposed trajectory planning mechanism provides a promising approach in determining the optimal viscoelastic parameters and trajectory parameters such that the optimal locomotion indexes can be met. Simulation results are presented to demonstrate the efficacy and feasibility of the proposed scheme.
Similar content being viewed by others

References
K. Wang, G. Yan, G. Ma, and D. Ye, “An earthwormlike robotic endoscope system for human intestine: design, analysis, and experiment,” Ann. Biomed. Eng., vol. 37, no. 1, pp. 210–221, Nov. 2008.
H. M. Kim, S. Yang, J. Kim, S. Park, J. H. Cho, J. Y. Park, T. S. Kim, E. S. Yoon, S. Y. Song and S. Bang, “Active locomotion of a paddling-based capsule endoscope in an in vitro and in vivo experiment (with videos),” Gastrointest. Endosc., vol. 72, no. 2, pp. 381–387, Aug 2010.
S. Jeong, H. Choi, C. Lee, G. Go, D. S. Sim, K. S. Lim, M. H. Jeong, S. Y. Ko, J. O. Park and S. Park, “Therapeutic intravascular microrobot through compensation of resistance and mutual inductance in electromagnetic actuation system,” Int. J. Control Autom. Syst., vol. 13, no. 6, pp. 1465–1475, Dec 2015.
F. Carpi, N. Kastelein, M. Talcott, and C. Pappone, “Magnetically controllable gastrointestinal steering of video capsules,” IEEE Trans. Biomed. Eng., vol. 58, no. 2, pp. 231–234, 2011.
S. Yim, E. Gultepe, D. H. Gracias, and M. Sitti, “Biopsy using a magnetic capsule endoscope carrying, releasing, and retrieving untethered microgrippers,” IEEE Trans. Biomed. Eng., vol. 61, no. 2, pp. 513–521, Feb 2014.
Y. Yamagata and T. Higuchi, “A micropositioning device for precision automatic assembly using impact force of piezoelectric elements,” Proc. of IEEE International Conference on Robotics and Automation, Proceedings, vol. 1, pp. 666–671, 1995.
H. Fang and J. Xu, “Dynamics of a mobile system with an internal acceleration-controlled mass in a resistive medium,” J. Sound Vib., vol. 330, no. 16, pp. 4002–4018, Aug 2011.
F. L. Chernous’ ko, “The optimum rectilinear motion of a two-mass system,” J. Appl. Math. Mech., vol. 66, no. 1, pp. 1–7, 2002.
F. L. Chernous’ ko, “On the motion of a body containing a movable internal mass,” Doklady Physics, vol. 50, pp. 593–597, 2005.
N. N. Bolotnik and T. Y. Figurina, “Optimal control of the rectilinear motion of a rigid body on a rough plane by means of the motion of two internal masses,” J. Appl. Math. Mech., vol. 72, no. 2, pp. 126–135, 2008.
P. Liu, H. Yu, and S. Cang, “Modelling and control of an elastically joint-actuated cart-pole underactuated system,” Proc. of 20th International Conference on Automation and Computing (ICAC), pp. 26–31, Sep 2014.
C. Zhang, H. Liu, and H. Li, “Experimental investigation of intestinal frictional resistance in the starting process of the capsule robot,” Tribol. Int., vol. 70, pp. 11–17, Feb 2014.
C. Zhang, H. Liu, and H. Li, “Modeling of frictional resistance of a capsule robot moving in the intestine at a constant velocity,” Tribol. Lett., vol. 53, no. 1, pp. 71–78, Jan 2014.
P. Liu, H. Yu, and S. Cang, “Geometric analysis-based trajectory planning and control for underactuated capsule systems with viscoelastic property,” Trans. Inst. Meas. Control, p. 0142331217708833, Sep 2017.
P. Liu, H. Yu, and S. Cang, “On periodically pendulumdiven systems for underactuated locomotion: A viscoelastic jointed model,” Proc. of 21st International Conference on Automation and Computing (ICAC), pp. 1–6, Sep 2015.
W. He and S. S. Ge, “Cooperative control of a nonuniform gantry crane with constrained tension,” Automatica, vol. 66, no. Supplement C, pp. 146–154, Apr 2016.
W. He, S. S. Ge, Y. Li, E. Chew, and Y. S. Ng, “Neural network control of a rehabilitation robot by state and output feedback,” J. Intell. Robot. Syst., vol. 80, no. 1, pp. 15–31, 2015.
H. Li, K. Furuta, and F. L. Chernousko, “Motion generation of the capsubot using internal force and static friction,” Proc. of 45th IEEE Conference on Decision and Control, pp. 6575–6580, Dec 2006.
N. Lee, N. Kamamichi, H. Li, and K. Furuta, “Control system design and experimental verification of Capsubot,” Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1927–1932, Oct 2008.
G. Su, C. Zhang, R. Tan, and H. Li, “A linear driving mechanism applied to capsule robots,” Proc. of International Conference on Networking, Sensing and Control, pp. 206–209, May 2009.
H. Yu, Y. Liu, and T. Yang, “Closed-loop tracking control of a pendulum-driven cart-pole underactuated system,” Proc. of Inst. Mech. Eng. Part J. Syst. Control Eng., vol. 222, no. 2, pp. 109–125, 2008.
H. Yu, M. N. Huda, and S. O. Wane, “A novel acceleration profile for the motion control of capsubots,” Proc. of IEEE International Conference on Robotics and Automation (ICRA), pp. 2437–2442, Aug 2011.
N. Sun, Y. Fang, Y. Zhang, and B. Ma, “A novel kinematic coupling-based trajectory planning method for overhead cranes,” IEEE/ASME Trans. on Mechatron., vol. 17, no. 1, pp. 166–173, 2012.
N. Sun, Y. Fang, X. Zhang, and Y. Yuan, “Transportation task-oriented trajectory planning for underactuated overhead cranes using geometric analysis,” IET Control Theory Appl., vol. 6, no. 10, pp. 1410–1423, 2012.
Y. Liu, E. Pavlovskaia, D. Hendry, and M. Wiercigroch, “Vibro-impact responses of capsule system with various friction models,” Int. J. Mech. Sci., vol. 72, pp. 39–54, 2013.
M. N. Huda and H. Yu, “Trajectory tracking control of an underactuated capsubot,” Auton. Robots, vol. 39, no. 2, pp. 183–198, Aug 2015.
P. Liu, H. Yu, and S. Cang, “Modelling and dynamic analysis of underactuated capsule systems with friction-induced hysteresis,” Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 549–554, Oct 2016.
M. W. Spong, “Underactuated mechanical systems,” Control Problems in Robotics and Automation, pp. 135–150, Springer, 1998.
V. Hassani, T. Tjahjowidodo, and T. N. Do, “A survey on hysteresis modeling, identification and control,” Mech. Syst. Signal Process., vol. 49, no. 1–2, pp. 209–233, Dec 2014.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Editor Hamid Reza Karimi. This work was partially supported by European Commission Marie Skłodowska-Curie SMOOTH (Smart robots for fire-fighting) project (H2020-MSCA-RISE-2016-734875) - https://doi.org/fusion-edu.eu/SMOOTH/, Royal Society International Exchanges Scheme (Adaptive Learning Control of a Cardiovascular Robot using Expert Surgeon Techniques) project (IE151224), and European Commission International Research Staff Exchange Scheme (IRSES) RABOT project (PIRSES-GA-2012-318902) - https://doi.org/rabot.fusion-edu.eu/.
Pengcheng Liu received the B.Sc. degree in electrical and electronic engineering and the M.Sc. degree in control theory and control engineering from Zhongyuan University of Technology, Zhengzhou, China, in 2007 and 2012, respectively, and the Ph.D. degree in robotics and control from Bournemouth University, Poole, United Kingdom, in 2017. He is currently a Research Fellow with the Lincoln Centre for Autonomous Systems (L-CAS), University of Lincoln, Lincoln, United Kingdom. His current research interests include nonlinear dynamics and control, computational intelligence, bio-inspired control, optimization, trajectory planning, and their applications to robotics.
Hongnian Yu received the B.Eng. degree in electrical and electronic engineering from Harbin Institute of Technology, Harbin, China, the M.Sc. degree in control engineering from Northeast Heavy Machinery Institute, Heilongjiang, China, and the Ph.D. degree in Robotics from King’s College London, United Kingdom. He is currently a Professor of computer science. His research interests include robotics, wireless networked control systems, RFID and its applications, mobile computing, modeling, scheduling, planning, and simulations of large discrete event dynamic systems with applications to manufacturing systems, supply chains, transportation networks and computer networks.
Shuang Cang received the B.Sc. (first class Hons.) degree in mathematics from Heilongjiang University, Harbin, China, the M.Sc. (with distinction) degree in applied mathematics from King’s College London, U.K. and the Ph.D. degree in applied mathematics from the University of Abertay Dundee, Dundee, U.K. She is currently a Professor of Information Systems and Management. Her research interests include data mining, artificial intelligence, pattern recognition, multivariance statistics, forecasting, and segmentations.
Rights and permissions
About this article

Cite this article
Liu, P., Yu, H. & Cang, S. Trajectory Synthesis and Optimization of an Underactuated Microrobotic System with Dynamic Constraints and Couplings. Int. J. Control Autom. Syst. 16, 2373–2383 (2018). https://doi.org/10.1007/s12555-017-0192-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-017-0192-7