
Abstract
The implementation of developing the wind power is an important way to achieve the low-carbon power system. However, the voltage stability issues caused by the random fluctuations of active power output and the irrational regulations of reactive power compensation equipment have become the prominent problems of the regions where large-scale wind power integrated. In view of these problems, this paper proposed an optimal reactive power dispatch (ORPD) strategy of wind power plants cluster (WPPC) considering static voltage stability for low-carbon power system. The control model of the ORPD strategy was built according to the wind power prediction, the present operation information and the historical operation information. By utilizing the automatic voltage control capability of wind power plants and central substations, the ORPD strategy can achieve differentiated management between the discrete devices and the dynamic devices of the WPPC. Simulation results of an actual WPPC in North China show that the ORPD strategy can improve the voltage control performance of the pilot nodes and coordinate the operation between discrete devices and the dynamic devices, thus maintaining the static voltage stability as well.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Because of the worsening of global ecological problems, the implementation of reducing carbon emissions and achieving sustainable development has become the issue of common concern around the world. China is one of the major contributions to the recent emission surge, and the electricity sector is the largest single source of carbon emissions, emitting approximately 40% of China’s CO2 from fossil fuel combustion [1]. Therefore, the electricity sector development in China will be filled with great challenges in the low-carbon and clean era [2, 3].
The Chinese government has developed the renewable energy all over the country in order to achieve the low-carbon power system. Among various renewable energy sources, the wind power becomes the most rapidly growing one due to its rich resources and mature technology, and the wind power installed capacity in China has been more than 91.412 GW by the end of 2013 [4]. However, limited by the distribution of the wind resource, most of the large-scale wind power bases under construction or planning are located in the regions far away from load center, such as North China, Northeast China and Northwest China. These regions where large-scale wind power plant cluster (WPPC) integrated generally possess the weakly connected grid structure, and the voltage stability issues caused by the random fluctuations of active power output of the wind power plants have become the prominent problems in low-carbon energy generation systems [5–7].
In order to improve the voltage quality of the point of common coupling (PCC), many wind power plants are equipped with wide variety of reactive power regulation devices and their own auto-voltage control system, so they can supply active power and reactive power to the grid [8–11]. However, due to the non-simultaneous variation of the wind speeds of different wind power plants in the WPPC, the reactive power and voltage control strategy of each wind power plant, which only aims at the reactive power balance of the single PCC, cannot satisfy comprehensive voltage stability needs of the WPPC in whole. While the reality is that some wind power plants where the voltage stability margin (VSM) doesn’t satisfy the security constraints have to limit their wind power output for ensuring the safe and stable operation of the WPPC. Therefore, the reactive power and voltage control of the WPPC have great significant for the large-scale effective utilization of this low-carbon energy.
In previous work, many scholars have investigated reactive power and voltage control strategy for wind power plants centralized region [12–17]. These studies mainly focus on the characteristics of reactive power compensation equipment in wind power plants and central substations, utilizing the operation information based on the time section that the voltage control cycle begin to decrease the power loss of WPPC [12–14] or to reduce the voltage deviation of the pilot nodes [15–17].
Actually, the WPPC is the generation system of intermittent low-carbon energy, and its reactive power dispatch has some particularities. On the one hand, it is much more difficult for the wind turbine generators (WTG) to maintain the active power output constant during the control cycle of reactive power dispatch than the conventional generators. Therefore, the reactive power dispatch strategy based on the operation information at one time section cannot guarantee the control performance during the whole control cycle. On the other hand, the discrete devices, such as shunt capacitor bank (SCB) and on load tap changer (OLTC), cannot smooth the rapid fluctuation of active power output due to the limit of their response time constant. Then, the frequent even irrational regulation of these discrete devices will induce the cascading trip-off of WTGs in the WPPC caused by the reactive power overcompensation or undercompensation.
This paper proposes an optimal reactive power dispatch (ORPD) strategy for the regions where large-scale WPPC integrated. In order to maintain sufficient VSM and restrict the frequent regulation of discrete devices of the WPPC during each control cycle, the control model for the strategy is established according to the wind power prediction, the present and the historical operation information. By implementing the differentiated management between the discrete devices and the dynamic devices, the strategy can achieve the coordination different reactive power regulation devices of the WPPC.
The remainder of this paper is organized as follows. The description of static voltage stability assessment of the WPPC is brought out in Section 2. Section 3 presents the technical aspects of the ORPD strategy. The mathematical model and solution algorithm are described in Section 4, and the simulation results are presented in Section 5. Finally, the conclusions are drawn in Section 6.
2 Static voltage stability assessment of WPPC
The static voltage stability is defined as an important subject in power systems and is considered in many planning and scheduling problems. In conventional power systems, the requirement of load is generally regarded as the driving force of voltage stability issue, and the static voltage stability can be established by the VSM index based on the P-V curve of the load and is expressed as [18, 19]:
where \( \lambda \) is the load factor; P is the active power of load in the actual operation point; \( P_{\hbox{max} } \) is the critical value of the load active power corresponding to the bifurcation point of the P-V curve which is calculated by a certain kind of ways to increase the load in the power system from the actual operation point.
However, the conventional VSM index expressed in (1) isn’t suitable for the regions where large-scale wind power plants integrated due to the random fluctuation characteristic of wind power generation. On the one hand, the fluctuation of the wind power output is bidirectional, and the significant or sudden changes of the bus voltage profiles caused by both sides of the active power fluctuation will induce voltage instability to the WPPC. Therefore, the VSM index only considering the increase of the active power output is inadequate for the WPPC voltage stability analysis. On the other hand, the active power output of the wind power plant is sometimes close to zero, and this will lead to the infinite calculation result of the index expressed in (1).
Based on the above analysis, the up-fluctuation factor λ u and down-fluctuation factor λ d are introduced in this paper to estimate the VSM of the wind power plant in the WPPC, which can be defined as:
where P U and P D are the critical values of the active power output of the wind power plant in up-fluctuation state and down-fluctuation state, respectively; P N is the active power output of the wind power plant in the actual state; P CAP is the installed capability of the wind power plant; λ ulim and λ dlim are the preset thresholds of VSM for up-fluctuation state and down-fluctuation state respectively. It is obvious that \( \lambda^{\text{u}} \in [0,1] \) and \( \lambda^{\text{d}} \in [ - 1,0] \).
3 Technical aspects of ORPD strategy of WPPC
Random fluctuations of active power output and wide variety of reactive power regulation devices are some of the typical characteristics of the regions where large-scale wind power plants are integrated. In order to solve the voltage issues caused by these characteristics, the ORPD strategy of the WPPC is in accordance with the wind power prediction information, the present operation information and the historical operation information, and the automatic voltage control capability of wind power plants, and central substations is also taken into account. The overall framework of the ORPD strategy of WPPC is shown in Fig. 1. Specifically, the main technical aspects of the proposed ORPD strategy of WPPC include the utilization of the wind power prediction, the regulation restrict of the discrete devices and the differentiated management between different devices.

Overall framework of the ORPD strategy of WPPC
3.1 Utilization of wind power prediction
In order to avoid the significant or sudden changes of the bus voltage profiles caused by the active power fluctuation and enhance the static voltage stability of the wind power plants during t ~ t + 1, the wind power prediction at t + 1 is taken into account when the OPRD control scheme at t is made in the proposed strategy. According to the definitions of VSM in (2) and (3), by considering the wind power prediction error at t + 1, the minimum VSM for up-fluctuation state and down-fluctuation state of wind power plant i at t is described in red and blue grid patterns, respectively, as shown in Fig. 1, which can be determined as:
where \( P_{{{\text{W}}_{i} \left( t \right)}} \) is the actual wind power output of wind power plant i at time section t; \( P_{{{\text{P}}_{i} \left( {t + 1} \right)}} \) is the wind power prediction value of wind power plant i at t + 1; \( \xi_{i(t + 1)}^{\text{u}} \) and \( \xi_{i(t + 1)}^{\text{d}} \) are the prediction error for up-fluctuation state and down-fluctuation state of wind power plant i at time section t + 1 under some confidence level respectively.
In (4), the \( \hbox{max} \{ \,\} \) means that the up-fluctuation state wind power at t is no less than the current state value; while in (5), the \( \hbox{min} \{ \,\} \) means that the up-fluctuation state wind power should be no more than the current state value. In such a case, the up-fluctuation factor \( \lambda^{\text{u}} \) and down-fluctuation factor \( \lambda^{\text{d}} \) introduced in Section 2 can meet the rules, that is, \( \lambda^{\text{u}} \in [0,1] \) and \( \lambda^{\text{d}} \in [ - 1,0] \).
3.2 Regulation restriction of discrete devices
In the proposed strategy, the historical operation information is utilized to reduce the disturbances caused by the frequent or irrational regulation of the discrete reactive power regulation devices. Based on the operational position of SCBs or OLTCs at t − 1, the regulating times of these discrete devices during t ~ t + 1 are converted to the operational cost which is regarded as one of the control objectives.
3.3 Differentiated management between different devices
In order to prevent the inappropriate reactive power compensation due to the frequent or irrational regulation of the discrete reactive power regulation devices, this paper implements differentiated management between the discrete devices and the dynamic devices of the WPPC. The discrete devices in central substations and wind power plant stations can adopt the constant reactive power control method, responding the tap position command during the control cycle. The dynamic devices in wind power plants can adopt the voltage control method, thus maintaining the PCC voltage within the allowed deviation range of the reference value by utilizing the automatic voltage control capability of the wind power plant.
4 Optimization formulations
4.1 Objective function
In this ORPD strategy, the total voltage deviation of pilot nodes of WPPC is defined as the deviation index, the total reactive power reserve of the dynamic devices of WPPC is defined as the reserve index, and the total regulating times of the discrete devices of WPPC are defined as the economic indexes. Therefore, the objective function can be expressed as:
where \( f_{\text{v}} \left( {\varvec{x}} \right) \), \( f_{\text{q}} \left( {\varvec{x}} \right) \) and \( f_{\text{n}} \left( {\varvec{x}} \right) \) are the deviation, the reserve and the economic indexes of the ORPD strategy, respectively; ω v, ω q and ω n are the weight coefficients of the three indexes, respectively.
-
1)
Deviation index
The deviation index in (6) can be expressed as:
where
In (7)–(10): \( i \in {\varvec{N}}_{\text{P}} \), \( {\varvec{N}}_{\text{P}} \) is the set of pilot node of WPPC; \( V_{{{\text{P}}_i }} \), \( V_{{{\text{P}}_i }}^{\text{ref}} \) are the actual and reference voltages of the pilot node \( i \), respectively; \( V_{{{\text{P}}_i }}^{\text{u}} \), \( V_{{{\text{P}}_i }}^{\text{d}} \) are the voltages of pilot node \( i \) in up-fluctuation state and down- fluctuation state, respectively; \( \alpha \), \( \alpha^{\text{u}} \) and \( \alpha^{\text{d}} \) are the acceleration factors for the three different operation states, respectively.
-
2)
Reserve index
The reserve index in (6) can be expressed as:
where \( i \in {\varvec{N}}_{\text{Q}} \), \( {\varvec{N}}_{\text{Q}} \) is the set of dynamic reactive power devices of the WPPC; \( Q_{{{\text{S}}_{i} }} \), \( Q_{{{\text{S}}_{i{\text{max}} } }} \), and \( Q_{{{\text{S}}_{i{\text{min}} } }} \) are the actual, the maximum and the minimum reactive power outputs of dynamic device \( i \), respectively.
-
3)
Economic index
The economic index in (6) can be expressed as:
where \( i \in {\varvec{N}}_{\text{T}} \), \( j \in {\varvec{N}}_{\text{C}} \), \( {\varvec{N}}_{\text{T}} \) and \( {\varvec{N}}_{\text{C}} \) are the sets of OLTCs and SCBs of the WPPC, respectively; \( \Delta u_{{{\text{T}}_{i} }} \) and \( S_{{{\text{T}}_{i} }} \) are the adjustment variation and the cost of unit variation of OLTC \( i \), respectively; \( \Delta u_{{{\text{C}}_{j} }} \) and \( S_{{C_{J} }} \) are the adjustment variation and the cost of unit variation of SCB \( j \), respectively.
4.2 Constraints of control strategy
The constraints of this control strategy include the power flow, the static voltage stability and the operating constraints.
-
1)
Power flow constraint
The power flow constraints in the actual state, the up-fluctuation state and the down-fluctuation state can be expressed as:
where \( i \in {\varvec{N}}_{\text{S}} \), \( {\varvec{N}}_{\text{S}} \) is the set of total nodes of WPPC; \( P_{{{\text{W}}_{i} }} \) and \( Q_{{{\text{W}}_{i} }} \) are the active and reactive power injected at node \( i \) in normal state, respectively; \( P_{{{\text{CAP}}_{i} }} \) is the installed capability of the wind power plant connected at node \( i \); \( Q_{{{\text{W}}_{i} }}^{\text{u}} \) and \( Q_{{{\text{W}}_{i} }}^{\text{d}} \) are the reactive power injected at node \( i \) in up-fluctuation state and down-fluctuation state, respectively; \( \theta_{ij} \), \( \theta_{ij}^{\text{u}} \) and \( \theta_{ij}^{\text{d}} \) are the phase angle differences between nodes \( i \) and \( j \) for the three different operational states, respectively; \( G_{ij} \) and \( B_{ij} \) are the real and imaginary parts of the \( ij \)th elements of the admittance matrix, respectively.
-
2)
Static voltage stability constraint
In order to maintain sufficient VSM in each control cycle, the static voltage stability constraints should be satisfied. They can be expressed as:
where \( \lambda_{i}^{\text{u}} \) and \( \lambda_{i}^{\text{d}} \) are the up-fluctuation and the down-fluctuation factors of wind power plant i, respectively; \( \lambda_{i}^{\text{ulim}} \) and \( \lambda_{i}^{\text{dlim}} \) are the thresholds of VSM of wind power plant i in the up-fluctuation state and the down-fluctuation state, respectively, which are described in (4) and (5).
-
3)
Operating constraints
The operating constraints are the upper and lower bounds of the control, and the state variables which can be expressed as:
where \( Q_{{{\text{S}}_{i} }}^{\text{u}} \) and \( Q_{{{\text{S}}_{i} }}^{\text{d}} \) are the reactive power outputs of dynamic device \( i \) in the up-fluctuation state and the down-fluctuation state respectively; \( T_{{{\text{K}}_{i} }} \),\( T_{{{\text{K}}_{i\hbox{max} } }} \) and \( T_{{{\text{K}}_{i\hbox{min} } }} \) are the actual, the maximum and the minimum tap positions of transformer \( i \). \( C_{{{\text{P}}_{i} }} \), \( C_{{{\text{P}}_{i\hbox{max} } }} \) and \( C_{{{\text{P}}_{i\hbox{min} } }} \) are the actual, the maximum and the minimum banks of capacitor \( i \).
4.3 Solving algorithm and control flow
The analytic hierarchy process (AHP) is a method for analyzing the multi-objective problems both quantitatively and qualitatively [20]. In this paper, the AHP is utilized to decide the weight coefficients of different indexes in the objective function (6). The weight coefficients can be decided when formulating the power system operating mode. Also, they can be decided by the dispatchers according to their operating experience during the process of ORPD.
The interior point filter algorithm (IPFA) has been concerned for possessing faster calculation speed and good robustness [21–23]. It is based on a primal dual interior point algorithm with a filter set which can be updated after every iteration. The filter can replace merit functions, avoiding the update of penalty parameters associated with the penalization of the constraints on merit functions. And the filter will be augmented after every iterative calculation, ensuring that the iteration point \( x_{k + 1} \) cannot return to the neighborhood of the previous iteration point \( x_{k} \). If the iteration point \( x_{k + 1} \) does not satisfy the filter rule, the backtracking line-search procedure will be used to decrease the trial step sizes unless the iteration point \( x_{k + 1} \) does not meet the filter rule. Over all, these procedures ensure that the algorithm cannot cycle between two points that alternatively decrease the constraint violation and the barrier objective function. In this paper, the mathematical model of WPPC ORPD strategy is solved by the IPFA. By using the IPFA, the discrete variables are adjusted continuously firstly, then the calculation results of discrete variables are fixed on the nearest rounding value. Finally, the optimization problem is calculated again and the discrete optimal solution will be found later.
The control flow chart of the proposed ORPD strategy for one control cycle is shown in Fig. 2. The large deviation between the preset prediction error and the real prediction error will lead to inappropriate VSM thresholds and the optimization problem will be infeasible with the inappropriate static voltage stability constraints. This means that there is not enough excess reactive power in the WPPC to meet the request of the active power output at t + 1. In this situation, the WPPC ORPD system will give up this ORPD control module and turn to the emergency voltage control module whose control objective is to find the maximum active power out of the WPPC with the current reactive power reserve. Due to space limitations, the emergency voltage control module is not discussed in this paper.

Flow chart of the ORPD strategy for one control cycle
5 Case studies
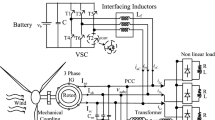
An actual WPPC system in North China is used to verify the validity of the proposed strategy. The structure of the simulation system is shown in Fig. 3. There are 14 wind power plants connected to 2 central substations, and the installed capability of the WPPC is 1,780.5 MW. The statistical information of installed capability and reactive power equipment in different regions is shown in Table 1.

Structure of the simulation system
Considering the influences of non-simultaneous variation on the wind speeds of different wind power plants, two different wind power output curves are used in the simulation. The wind power prediction and actual values of the wind power plants in different regions for 24 h are shown in Fig. 4, where the time resolution of the prediction value is 15 min and the sampling period of the actual value is 1 min. According to the historical statistics, the probability that the wind power prediction error of the wind power plants in the WPPC exceeds 15% is less than 2%.

Prediction and actual values of wind power for wind power plants in different regions
In this simulation, two different ORPD modes of WPPC are utilized to compare the control performance:
-
1)
In control mode I, the prediction and the historical operation information is ignored, and the control objective is only the voltage deviation of the pilot nodes. All the reactive power devices can adopt the constant reactive power control method and the control cycle is 15 min.
-
2)
In control mode II, the proposed ORPD strategy in this paper is used. The thresholds of the VSM are set by the prediction error at 98% confidence level. The control cycle is also 15 min.
5.1 Control performance of voltage deviation of pilot nodes
The two pilot nodes of the WPPC are the 220 kV bus of the central substations A and B. The voltage control performance of the two pilot nodes in different control modes are shown in Fig. 5, and the statistical results of the voltage control performance are given in Table 2.

Voltage reference and voltage control performance of the pilot nodes in different control modes
As indicated in Fig. 5 and Table 2, in control mode I, although the voltage control of the pilot nodes is accurate at the time section when ORPD control cycle begin, the voltage deviation of the pilot nodes cannot be guaranteed during the whole control cycle due to the fluctuation of the wind power. In control mode II, by utilizing the wind power prediction, the up-fluctuation and down-fluctuation states can be considered and therefore the voltage deviation of the pilot nodes can be guaranteed during the whole ORPD control cycle.
5.2 Control performance of coordination between different reactive power devices
The statistical results of the reactive power device regulation in different control modes are given in Table 3. The total reactive power consumption results of the discrete and the dynamic devices for 24 h are shown in Fig. 6.

Total reactive power consumption of the WPPC
As can be seen from Table 3 and Fig. 6, considering the reserve index of the dynamic devices and the economic index of the discrete devices in the control objectives utilizing the historical operation information, the regulating times of the discrete devices are decreased and the dynamic reactive power reserve is increased in control mode II. Moreover, by implementing the differentiated management between the discrete devices and the dynamic devices of the WPPC, the discrete devices can undertake the basis reactive power support and the dynamic devices can compensate the real-time shortfall of the reactive power caused by the wind power fluctuation in control mode II.
5.3 Control performance of static voltage stability
The VSM of the WPPC by the ORPD strategy in control mode II is shown in Fig. 7, and the corresponding permitted fluctuation values of wind power of WPPC in control mode II are shown in Fig. 8. As indicated in Fig. 7 and Fig. 8, the WPPC can maintain sufficient VSM in each control cycle by setting the static voltage stability constraints utilizing wind power prediction information in control mode II.

VSM of the WPPC in control mode II

Actual and permitted fluctuation values of wind power of WPPC in control mode II
6 Conclusions
The implementation of reactive power and voltage control of WPPC have great significant for the large-scale effective utilization of wind power. This paper proposes an ORPD strategy of WPPC considering static voltage stability. Through theoretical analysis and simulation verification, the following conclusions are obtained.
-
1)
By utilizing the wind power prediction in the ORPD strategy, the voltage deviation of the pilot nodes is improved and the WPPC can maintain sufficient VSM in each control cycle. Therefore, the WPPC can operate in a more security mode during the period when the wind power is in heavy-load or large-fluctuation conditions.
-
2)
The reserve index of the dynamic devices and the economic index of the discrete devices are taken into consideration on the control objectives utilizing the historical operation information. By doing this, the regulating times of the discrete devices are decreased, and meanwhile the dynamic reactive power reserve is increased.
-
3)
By utilizing the automatic voltage control capability of the wind power plants and central substations, the differentiated management between the reactive power devices of the WPPC is implemented. Therefore, the discrete devices can undertake the basis reactive power support, while the dynamic devices can compensate the real-time shortfall of the reactive power caused by the wind power fluctuation. thus, the coordination between different devices of the WPPC is achieved.
References
National Bureau of Statistics of China. China Statistics Yearbook (2010) http://www.stats.gov.cn. Accessed 7 Feb 2011
Chen QX, Kang CQ, Ming H et al (2014) Assessing the low-carbon effects of inter-regional energy delivery in China’s electricity sector. Renew Sustain Energy Rev 32:671–683
Chen QX, Kang CQ, Xia Q (2010) Power generation expansion planning model towards low-carbon economy and its application in China. IEEE Trans Power Syst 25(2):1117–1125
Li JF, Cai FB, Qiao LM et al (2013) China wind power development report 2013. China Enviromental Science Press, Beijing
Vittal E, O’Malley M, Keane A (2010) A steady-state voltage stability analysis of power systems with high penetrations of wind. IEEE Trans Power Syst 25(1):433–442
Yang S, Wang WS, Liu C et al (2014) Coordinative strategy of reactive power and voltage control for improving static voltage stability of wind power centralized system. Power Syst Technol 38(5):1250–1256
Hossain MJ, Hemanshu RP, Mahmud MA et al (2012) Investigation of the impacts of large-scale wind power penetration on the angle and voltage stability of power systems. IEEE Syst J 6(1):76–84
Moursi ME, Joos G, Abbey C (2008) A secondary voltage control strategy for transmission level interconnection of wind generation. IEEE Trans Power Electron 23(3):1178–1190
Pappala VS, Nakawiro W, Erlich I (2010) Predictive optimal control of wind farm reactive sources. In: 2010 IEEE/PES transmission and distribution conference and exhibition, New Orleans, USA
Erlich I, Nakawiro W, Martinez M (2011) Optimal dispatch of reactive sources in wind farms. In: 2011 IEEE power and energy society general meeting, Detroit, USA
Ullah NR, Bhattacharya K, Thiringer T (2009) Wind farms as reactive power ancillary service providers—technical and economic issues. IEEE Trans Energy Convers 24(3):661–672
Mònica AP, Agustí E, Samuel GA (2014) Droop control for loss minimization in HVDC multi-terminal transmission systems for large offshore wind farms. Electr Power Syst Res 112:48–55
Sáiz-Marín E, Lobato E, Egido I (2014) Optimal voltage control by wind farms using data mining techniques. Renew Power Gener 8(2):141–150
Zhang XG, Pan WM, Liu YC et al (2012) Improved grid voltage control strategy for wind farms with DFIGs connected to distribution networks. J Power Electron 12(3):495–502
Chen HF, Zhang YW, Min Y et al (2013) Graded voltage control strategy for clustering wind farms based on doubly fed induction generators. Autom Electr Power Syst 37(4):7–13
Ahmidi A, Guillaud X, Besanger Y et al (2012) A multilevel approach for optimal participating of wind farms at reactive power balancing in transmission power system. IEEE Syst J 6(2):260–269
Kumar VSS, Reddy KK, Thukaram D (2014) Coordination of reactive power in grid-connected wind farms for voltage stability enhancement. IEEE Trans Power Syst 29(5):2381–2390
Kunder P (1994) Power system stability and control. McGrawHill, New York
Abed AM (1999) WSCC voltage stability criteria, under voltage load shedding strategy, and reactive power reserve monitoring methodology. Proc IEEE PES Summer Meet 1:191–197
Gustavo S, Vladimiro M (2009) A two-stage planning and control model toward economically adapted power distribution systems using analytical hierarchy processes and fuzzy optimization. Int J Electr Power Energy Syst 31(6):277–284
Wachter A, Bieglery LT (2001) Line search filter methods for nonlinear programming: motivation and global convergence. IBM T. J. Watson Research Center, Yorktown Heights
Ulbrich M, Ulbrich S, Vicente L (2004) A globally convergent primal-dual interior point filter method for nonconvex nonlinear programming. Math Program 100(2):379–410
Córcoles J, González MA, Rubio J (2009) Multi-objective optimization of real and coupled antenna array excitations via primal dual interior point filter method from spherical mode expansions. IEEE Trans Antennas Propag 57(1):110–121
Acknowledgment
This work was supported by the National Natural Science Foundation of China (No. 51207145), the Science and Technology Project of State Grid Corporation of China (No. NY71-14-035).
Author information
Authors and Affiliations
Corresponding author
Additional information
CrossCheck date: 19 November 2014
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
About this article

Cite this article
YANG, S., WANG, W., LIU, C. et al. Optimal reactive power dispatch of wind power plant cluster considering static voltage stability for low-carbon power system. J. Mod. Power Syst. Clean Energy 3, 114–122 (2015). https://doi.org/10.1007/s40565-014-0091-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40565-014-0091-x