
Abstract
Sparse-view Reconstruction can be used to provide accelerated low dose CT imaging with both accelerated scan and reduced projection/back-projection calculation. Despite the rapid developments, image noise and artifacts still remain a major issue in the low dose protocol. In this paper, a deep learning based method named Improved GoogLeNet is proposed to remove streak artifacts due to projection missing in sparse-view CT reconstruction. Residual learning is used in GoogLeNet to study the artifacts of sparse-view CT reconstruction, and then subtracts the artifacts obtained by learning from the sparse reconstructed images, finally recovers a clear correction image. The intensity of reconstruction using the proposed method is very close to the full-view projective reconstructed image. The results indicate that the proposed method is practical and effective for reducing the artifacts and preserving the quality of the reconstructed image.
Similar content being viewed by others


Introduction
X-ray Computed Tomography (CT) techniques have been widely utilized in clinical for diagnosis and intervention, including imaging, image-guided needle biopsy, image-guided intervention, and radiotherapy with noticeable benefits. However, with the broadened application of CT in clinical scenarios, the radiation risk issue is receiving more and more attention. As a result, the demand of radiation dose reduction is becoming more and more intense under the principle of ALARA (as low as reasonably achievable). Despite the rapid developments, image noise and artifacts still remains a major issue in the low dose protocol. Balancing image quality and x-ray dose level has become a well-known trade-off problem. Basically, low dose CT can be achieved reducing the tube currents (or voltage) or projection numbers. The approach of tube current (or voltage) reduction sacrifices image quality for dose reduction. Projection number reduction can be realized by applying sparse-view protocol for a given scanning trajectory. CT reconstruction with this approach is termed sparse-view CT reconstruction in this study. Compared to tube current or voltage reduction, sparse-view CT reconstruction does not suffer from the increased noise in projections and has the additional benefit of accelerated scan and projection/back projection calculation. Nevertheless, sparse-view CT reconstruction suffers from image quality deterioration caused by the increased streaking artifacts due to missing projections.
A great effort has been devoted to improve sparse-view CT reconstruction in the past twenty years. Specifically, by accommodating measurement statistics, modeling data acquisition geometry, and enforcing physical constraints, regularized iterative reconstruction algorithms often produce superior image quality with highly noisy measurements, and hence having become increasingly popular. In 2006, Donoho proposed the concept of compressed sensing (CS) and proved that sparse signals or piecewise images could be satisfactorily reconstructed from far less sampling data than the requirement of the Nyquist sampling theorem.
Base on the CS theory, a state of art solution, which is called as adaptive steepest descent projection onto convex sets (ASD-POCS) method1, was invented by Sidky et al. by minimizing the total variation (TV) of the desired image for CT image reconstruction from sparse projection views. Recently, a more general term of TV minimisation, called adaptive-weighted total variation (AwTV) model2, was proposed to improve the preservation of edge details by bringing the local information into the above conventional TV model.
To eliminating the patchy artifacts and preserving subtle structures, Liu et al. proposed a total variation-stokes-projection onto convex sets (TVS-POCS) method3 for the purpose of recovering possible missing information in the sparse-view data situation.
Although these TV-based algorithms are successful in a number of cases, the power of the TV minimization constraint is still limited. Besides the TV-based method and its general case, a prior image-constrained compressed sensing (PICCS) method4 and patch based nonlocal means (NLM)5, tight wavelet frames, feature dictionary learning6,7, low rank methods and so on, were introduced to further reduce the number of required projection views by incorporating prior images or patch information to the CS theory.
Compared to TV based method, such approaches have the potential of achieving better performance in representing patch-wise structure features and leading to better CT image quality.
Recently, Deep Learning techniques have recently been considered to improve CT reconstruction quality. H. C. Burger at al proposes a Multi-Layer Perceptron (MLP) machine based method to learn the mapping from the noisy images to the corresponding noise-free images and obtain an impressive performance in image restoration8,9,10. However, the application of MLP with fully connected layers is often limited by the requirement of fixed input/output size and the weight parameter explosion in network training. J.K. Batenburg and D. Pelt proposed introduce a new CT reconstruction method that improves the filtered back projection method by using a custom data-dependent filter that minimizes the projection error of the resulting reconstruction11. Li et al.12 proposed a dictionary-based sinogram completion method to inpaint the missing sinogram data by applying K-SVD algorithm13, with database composed by the patches from simulated CT sinogram. Chen et al.14,15 proposed a new sinogram restoration approach (Sinogram Discriminative Feature Representation) to improve projection data inconsistency. Lee et al.16 applied convolution neural network (CNN) to interpolate missing data of sinogram for sparse-view CT, by combining with residual learning for better convergence and patch-wisely training the network to avoid memory problem.
Würf et al.17 and Ma et al.18 mapped FBP algorithm into a deep CNN architecture that allowed a data-driven approach for joint optimization of correction steps in projection domain and image domain. Cheng et al.19 simulated the iterative process using a DL based leapfrogging strategy. The method was applied to speed up a penalized likelihood PET image reconstruction algorithm, block sequential regularized expectation maximization. In20, a residual convolutional network architecture was designed to build the relationship between the wavelet coefficients of low-dose and high-dose CT images. Han et al.21 proposed a U-net structured architecture with residual learning to predict the artifacts in sparse-angle reconstructed CT image. A residual learning of deep CNN method was reported in22 for image de-noising. Jin et al.23 proposed a deep convolutional network (FBPConvNet) that combines FBP with a multi-resolution CNN based on Unet24 and residual learning25.
Results
Experimental Design
In this section, the well-known filtered back-projection (FBP) reconstruction method is performed and the residual learning is used to remove artifacts generated during sparse-view reconstruction.
There are 16000 slices of images for each types of the training data, and 1600 slices of images for each types of the test data. For the training data set, we use the FBP reconstruction using 60 and 120 projection views (full scan) as input x and the difference between the full-view (720 views) reconstruction and the sparse view reconstructions are used as label f. The architectural parameters are described in Table 1.
The acquisition parameters of the experimental scans are defined in Table 2. To evaluate the imaging performance of the proposed method under realistic conditions, a set of clinical data and images were used. The image dataset contains 2000 full dose 512*512 CT images. The reference slices were generated using FBP method from 720 projection views. We calculate synthetic projections using fan-beam geometry and projections data were down-sampled to 60 and 120 views to simulate the few-view geometry.
CT data analysis
In this section, sparse view CT reconstruction input images are generated using FBP from 120 (3° angle increment for the tube), and 60 (6° angle increment for the tube) projection views, respectively. The raw data are exported from clinical routine CT examinations. Artifact-free original images are generated by FBP which uses all 720 projection views. The data of the 720 projections are used as full-view projection. We assumed the reconstruction from the full-view data using FBP algorithm as our gold standard image. As we all know, after reducing the number of projections, there is a large number of stripe artifacts in the reconstructed image. As shown in Figs 1 and 2, the column (a) shows the full-view projection. The column (b) shows the sparse reconstruction of the 120-views and 60-views using FBP. The column (c) shows ADS-POCS method [1] of the 120-views and 60-views and the column (d) is our method.

The 512*512 CT images reconstructed by 120 projection views. Column (a) shows the reconstruction by the FBP method from the full projection views. Column (b) shows the reconstruction by the FBP method from the sparse projection views. Column (c) shows the reconstruction by the ADS-POCS method from the sparse projection views. Column (d) shows the reconstruction by the proposed method. All images display in the same window at row 1, 3 and 5. In order to compare the CT value with different reconstruction method, we use 2D atlas to display. The result is shown in row 2, 4 and 6.

The 512*512 CT images reconstructed by 60 projection views. Column (a) shows the reconstruction by the FBP method from the full projection views. Column (b) shows the reconstruction by the FBP method from the sparse projection views. Column (c) shows the reconstruction by the ADS-POCS method from the sparse projection views. Column (d) shows the reconstruction by the proposed method. All images display in the same window at row 1, 3 and 5. In order to compare the CT value with different reconstruction method, we use 2D atlas to display. The results are shown in row 2, 4 and 6.
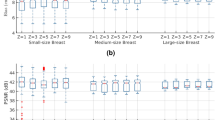
Peak signal-to-noise ratio (PSNR) and stands for structural similarity (SSIM) index is related to evaluate quality of the reconstructed image. PSNR is based on the error between corresponding pixels. The unit of PSNR is dB, the larger value means smaller distortion. SSMI measures image similarity from three aspects of brightness, contrast and structure respectively. The range of SSIM is 0 to 1. Similarly, the larger value represents smaller image distortion. The average PSNR and SSIM between the results and full projection reconstructed images are calculated and shown in Table 3. As shown in Table 3, the PSNR values and the SSIM values have a very pleasant value. The stored data is 12 bits.
Time consumption
This article uses MatConvNet toolkit in the training process, the running environment is MATLAB 2017a. In the train stage, the processor is Intel Xeon E5-2650, the memory is 128 GB. We use one GeForce GTX 1080TI GPU video card for train. In this configuration environment, it takes about 72 hours to train samples over the network for one type of data. In the test stage, the processor is Intel (R) Core (TM) i7 CPU@ 2.2 GHz, the memory is 16GB. In this stage configuration environment, the time consumption is show in Table 4.
Discussion
As shown in the zoomed ROI images at the top of Figs 1, 2 and 3, the proposed method displays a very good image quality. Compared to the gold standard image, the FBP result suffered from the artifacts in a high degree. The algorithms can greatly remove the artifacts than the ADS-POCS. The artifacts of reconstructed images after different sparse-view training is greatly removed by the proposed method.

The 256*256 CT images reconstructed by 120 projection views. Column (a) shows the reconstruction by the FBP method from the full projection views. Column (b) shows the reconstruction by the FBP method from the sparse projection views. Column (c) shows the reconstruction by the ADS-POCS method from the sparse projection views. Column (d) shows the reconstruction by the proposed method.
As shown in Fig. 3, 256*256 CT images are used to remove the artifacts. The PSNR and SSIM index can be better by using the lower resolution in the experiments. The average PSNR and SSIM between the results and full projection reconstructed images are calculated and shown in Table 5. As shown in Table 5, the PSNR values and the SSIM values have a very pleasant value.
Does the multi-scale improved GoogLeNet works better than one scale? We use the one scale feed-forward convolutional neural network to compare. The one scale CNN’s flowchart is shown in Fig. 4.

The flowchart of the AFCNN method.
As shown in Fig. 5 and Table 6, we can clearly see the multi-scale improved GoogLeNet works better than the one scale CNN.

The image reconstructed by 60-views. Column (a) shows the reconstruction by the FBP method from the full projection views. Column (b) shows the reconstruction with artifacts by the one scale CNN method from the sparse projection views. Column (c) shows the artifacts-free reconstruction by the proposed method.
In this paper, we use improved GoogLeNet for the artifacts learning. The sparse-view reconstructed images f is much more like the full view reconstructed images than the artifacts n(especially when the artifacts level is low). Thus, typical mapping function F(f) would be closer to an identity mapping than CNN’s mapping function μ(f), and the artifacts learning for improved GoogLeNet is more suitable for remove artifacts.
We develop the GoogLeNet model and use it that outperforms the FBP method, ADS-POCS method and one scale CNN model. FBP method is the classical method. It has been used in the clinical CT system. But in the urtal-sparse view reconstruction, the artifacts were severe and covered all the information using FBP method. Although ASD-POCS preserved some structures, the details were heavily blurred and it is high computational complexity. As shown in Figs 1 and 2, our network preserved the details better than ASD-POCS. It also has the quickly computation speed. The intensity of reconstruction using the proposed method is very close to the full-view projective image.
The proposed method approaches to the gold standard image. The results indicate that the improved GoogLeNet algorithm is practical and effective for reducing the streak artifacts caused by projection missing in sparse CT reconstruction and preserving the quality of the sparse-view reconstruction CT image.
Methods
Recently, the CNN has shown great success in handling various tasks. This work focuses on the design and learning of CNN for de-artifacts of the sparse-view CT reconstruction.
In this paper, we apply a GoogLeNet26 (GN) based post-processing approach to remove the artifacts in the sparse-view CT reconstruction. GoogleNet is a deep convolutional neural network architecture that achieves the new state of the art for classification and detection. The most important in GN is the inception modules, which has the multiscale convolutional kernels. We restricted the current incarnations of the inception architecture with different filter sizes and showed it in Fig. 6.

The flowchart of the proposed method.
This paper uses the residual learning for Improved GN to study the artifacts of sparse-view CT reconstruction, and then subtracts the artifacts which obtained by learning from the sparse reconstructed images, finally recovers a clear correction image.
The model of sparse-view reconstructed image f = x + n, which include the artifacts n, is similar to the model of image with noise. A mapping function F(f) = x is learned to predict the clear image in the typical de-noising models such as MLP10. In this paper, we use the Improved GN to train a mapping function μ(f) ≈ n and then use it to get the residual image n. The averaged mean squared error between the artifacts which is the difference of reconstructed images and the artifacts of network training is used as the loss function to measure the recovery image, and the formula is
which \({\{({f}_{i},{x}_{i})\}}_{i=1}^{N}\) represents N pairs of images it contains artifacts and real images, μ(f) is the CNN’ mapping function. In order to ensure the quality of the recovery image, it is necessary to train the parameters Θ in the network to obtain the appropriate parameter values so that the mean square error is minimized.
The artifacts image is obtained from the Improved GN, and then the final clear recovery image is obtained according to the algorithm x = f − n, which is shown in Fig. 7.

The process of removing artifacts from sparse reconstructed images in CT.
References
Sidky, E. Y. & Pan, X. Image reconstruction in circular cone-beam computed tomography by constrained, total-variation minimization. Physics in Medicine & Biology 53(17), 4777 (2008).
Liu, Y. et al. Adaptive-weighted total variation minimization for sparse data toward low-dose x-ray computed tomography image reconstruction. Physics in Medicine & Biology 57(23), 7923–56 (2012).
Liu, Yan et al. Total Variation-Stokes Strategy for Sparse-View X-ray CT Image Reconstruction. IEEE Transactions on Medical Imaging. 33(3), 749–63 (2014).
Chen, G. H., Tang, J. & Leng, S. Prior Image Constrained Compressed Sensing (PICCS). Proceedings - Society of Photo-Optical Instrumentation Engineers. 6856(2), 685618 (2008).
Lu, K., He, N. & Li, L. Nonlocal Means-Based Denoising for Medical Images. Computational & Mathematical Methods in Medicine. 2012(9), 438617 (2011).
Chen, Y. et al. Artifact suppressed dictionary learning for low-dose CT image processing. IEEE Transactions on Medical Imaging. 33(12), 2271 (2014).
Chen, Y. et al. Thoracic low-dose CT image processing using an artifact suppressed large-scale nonlocal means. Physics in Medicine & Biology. 57(9), 2667 (2012).
Burger, Harold Christopher, Schuler, C. J. & Harmeling, S. Image denoising with multi-layer perceptrons, part 1: comparison with existing algorithms and with bounds. Computer Science (2012).
Burger, Harold Christopher, Schuler, C. J. & Harmeling, S. Image denoising with multi-layer perceptrons, part 2: training trade-offs and analysis of their mechanisms. Computer Science (2012).
Burger, H. C., Schuler, C. J. & Harmeling, S. Image denoising: Can plain neural networks compete with BM3D? Computer Vision and Pattern Recognition. 2012, 2392–2399 (2012).
Pelt, D. M. & Batenburg, K. J. Improving filtered backprojection reconstruction by data-dependent filtering. IEEE Transactions on Image Processing. 23(11), 4750–4762 (2014).
Li, S. et al. Dictionary learning based sinogram inpainting for CT sparse reconstruction. Optik - International Journal for Light and Electron Optics. 125(12), 2862–2867 (2014).
Aharon, M., Elad, M. & Bruckstein, A. K-SVD: An Algorithm for Designing Overcomplete Dictionaries for Sparse Representation. IEEE Trans. Signal Process. 54(11), 4311–22 (2006).
Chen, Y. et al. Structure-adaptive Fuzzy Estimation for Random-Valued Impulse Noise Suppression. IEEE Transactions on Circuits & Systems for Video Technology. 99, 1–1 (2016).
Jin, Liu et al. Discriminative Feature Representation to Improve Projection Data Inconsistency for Low Dose CT Imaging. IEEE Transactions on Medical Imaging. 36(12), 2499–2509 (2017).
Lee, H. & Cho, S. View-interpolation of sparsely sampled sinogram using convolutional neural network. SPIE Medical Imaging. 1013328 (2017).
Würfl, Tobias et al. Deep Learning Computed Tomography. Medical Image Computing and Computer-Assisted Intervention–MICCAI 2016. Springer International Publishing (2016).
Ma, X. F., Fukuhara, M. & Takeda, T. Neural network CT image reconstruction method for small amount of projection data. Nuclear Inst & Methods in Physics Research A. 449(1), 366–377 (2000).
Cheng, L. et al. Accelerated Iterative Image Reconstruction Using a Deep Learning Based Leapfrogging Strategy. International Conference on Fully Three-Dimensional Image Reconstruction in Radiology and Nuclear Medicine (2017).
Kang, E., Min, J. & Ye, J. C. A deep convolutional neural network using directional wavelets for low‐dose X‐ray CT reconstruction. Medical Physics. 44(10) (2016).
Prakash, P. et al. Reducing abdominal CT radiation dose with adaptive statistical iterative reconstruction technique. Investigative Radiology. 45(4), 202 (2010).
Zhang, K. et al. Beyond a Gaussian Denoiser: Residual Learning of Deep CNN for Image Denoising. IEEE Transactions on Image Processing 99, 1–1 (2017).
Jin, K. H. et al. Deep Convolutional Neural Network for Inverse Problems in Imaging[J]. IEEE Transactions on Image Processing A Publication of the IEEE Signal Processing Society. 26(9), 4509–4522 (2016).
Ronneberger, O., Fischer, P. & Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. International Conference on Medical Image Computing and Computer-Assisted Intervention. 234–241 (2015).
He, K., Zhang, X., Ren, S. & Sun, J. Deep Residual Learning for Image Recognition. IEEE Conf. Comput. Vis. Pattern Recognit. 770–78 (2016).
Szegedy, C. et al. Going deeper with convolutions. IEEE Conference on Computer Vision and Pattern Recognition. IEEE Computer Society 1–9 (2015).
Acknowledgements
The authors thank the anonymous referees for their constructive and insightful comments, which greatly improved the presentation of our research results. This work was supported in part by the University Natural Science Research Project of Jiangsu Province (Grant NO. 17KJB510038), the National Natural Science Foundation of China (Nos 81530060, 81671785 and 11547155) and the State’s Key Project of Research and Development Plan under Grants 2017YFA0104302, 2017YFC0107900, and 2017YFC0109202.
Author information
Authors and Affiliations
Contributions
Shipeng Xie wrote the paper, Lizhe Xie and Yang Chen conceived the experiment(s), Xinyu Zheng and Jin Liu conducted the experiment(s), Yining Hu, Jingjie Yan, Zhu Hu and Yudong Zhang analyzed the results. All authors reviewed the manuscript.
Corresponding authors
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Xie, S., Zheng, X., Chen, Y. et al. Artifact Removal using Improved GoogLeNet for Sparse-view CT Reconstruction. Sci Rep 8, 6700 (2018). https://doi.org/10.1038/s41598-018-25153-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-018-25153-w
This article is cited by
-
Survey of methods and principles in three-dimensional reconstruction from two-dimensional medical images
Visual Computing for Industry, Biomedicine, and Art (2023)
-
Artificial intelligence & deep learning for the radiologist: a simple updated guide without the maths
Chinese Journal of Academic Radiology (2023)
-
The use of deep learning methods in low-dose computed tomography image reconstruction: a systematic review
Complex & Intelligent Systems (2022)
-
Patch-based artifact reduction for three-dimensional volume projection data of sparse-view micro-computed tomography
Radiological Physics and Technology (2022)
-
Current and emerging artificial intelligence applications in chest imaging: a pediatric perspective
Pediatric Radiology (2022)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
