Soliton Dynamics of the Generalized Shallow Water Like Equation in Nonlinear Phenomenon
 Ghazala Akram
Ghazala Akram Maasoomah Sadaf
Maasoomah Sadaf M. Atta Ullah Khan
M. Atta Ullah Khan- Department of Mathematics, University of the Punjab, Lahore, Pakistan
The generalized shallow water like equation is investigated in this research paper. Exact solutions of generalized shallow water like equation are extracted using modified auxiliary equation (MAE) method and extended
1 Introduction
The nonlinear partial differential equations (NPDEs) play important role to construct the mathematical model of many natural phenomena and dynamical processes such as propagation of sound or heat waves, fluid flow, elasticity, electrodynamics. Many nonlinear complex phenomena and dynamic processes are represented by NPDEs such as Navier-stokes equations, Bateman-Burgers equation Korteweg-De Vries equations, Benjamin-Ono equation, Boomeron equation, Kadomtsev Petviashvili equation and many other NPDEs. These NPDEs represent numerous dynamical processes such as fluid dynamics, shallow water wave, internal waves in deep water, solitary and soliton waves in optics etc.Shallow water equations (SWE) of motion are used to demonstrate the horizontal structure of an atmosphere and shallow water wave dynamics. The SWEs illustrate the development of an incompressible fluid under the effect of rotational and gravitational accelerations. Several types of motions that can be described by the solutions of shallow water equations, including solitary waves, soliton wave, Rossby waves and inertia-gravity waves.The evolution equations describing the water waves are nonlinear in general and have been an interest of research for many years [1]. Many researchers have investigated different physical phenomena and dynamical processes arising in shallow water waves. Kudryashov et al. [2] discussed the elliptic traveling waves for the Olver equation which is a unidirectional model to express long, small amplitude waves in shallow water. Kochanov et al. [3] studied the shallow water waves under a layer of ice.
The main motivation of this work is to further extend the study on shallow water waves. In this manuscript, the generalized shallow water like (GSWL) equation is considered. The exact soliton solutions of the generalized shallow water like (GSWL) equation are constructed using the modified auxiliary equation (MAE) method and the extended
where ψ is dependent variable and it is dependent upon the space variables x, y, z, time variable t. The GSWL equation has been investigated by some researchers [4–6] using different techniques.
The exact solutions of NPDEs are very important to comprehend the physical mechanism of natural phenomena, that have been modeled by NPDEs. Exact solutions provide a lot of information about structures of NPDEs. Nonlinear evolution equations (NEEs) are frequently utilized in optical fibres, plasma physics, mathematical physics and engineering. There are many wave solutions such as cnoidal wave, snoidal wave, periodic wave, shock wave, solitary wave and soliton wave solutions, that illustrate the phenomena modeled by NEEs. In recent decades, solitons and solitary wave solutions are studied by many researchers in various nonlinear scientific fields.
A number of methods such as the MAE [7], generalized tanh method [8], (G′/G)-expansion method [9, 10], simplest equation method [11], extended simplest equation method [12], (G′/G, 1/G)-expansion method [13], material ve method [14], Hirota’s method, tanh − coth method, exp-function method [15], the homotopy analysis method [16], the extended sin-cosine method [17], modified Kudryashov method [18], have been developed for investigating the solitons and solitary wave solutions of NPDEs.
The exact solutions of NPDEs have been extracted for last decade using numerous methods. The NPDEs such as, Triki-Biswas equation [19], Burgers equation [20], fractional DNA Peyrard-Bishop equation [21], Cahn-Allen equation [21] and Lakshmanan-Porsezian-Daniel model [22, 23], have been investigated in recent years.In this paper, the exact traveling wave solutions of GSWL equation are extracted using the MAE method and extended
The rest of research article is demonstrated in the following sections: The algorithm of MAE method and extended
2 Demarcation of Methods
The NPDE is considered for the unknown function u(x, y, z, t) in the form
where x, y, z are space variables and t is time variable. F is a polynomial in dependent variable v and its partial derivatives.The NPDE (2) can be transformed in ordinary differential equation (ODE) using following transformations,
where
2.1 The Algorithm of MAE Method
This method is illustrated in [24] in which the formal solution of Eq. 4 is considered, as
where b0, bi and ci are unknown parameters to be determined later. For function s(η), the auxiliary equation is defined, as
where α, β, δ are constants and K ≠ 1, K > 0.The value of N can be evaluated with the aid of homogeneous balance principle (HBP), which is illustrated in [25]. In HBP, the value of N is evaluated by equating the degree of highest order derivative to degree of nonlinear term in Eq. 4. If
By substituting the value of N in Eq. 5, the formal solution corresponding to Eq. 4 is obtained. Substituting the obtained formal solution with auxiliary Eq. 6 into Eq. 4, accumulating the coefficients of Kjs(η) (j = 0, ± 1, ± 2, ± 3, … ) and setting equal to zero, the system of linear equations can be obtained. To solve this system of equations simultaneously, symbolic software such as Maple software can be used. In result, the values of unknown constants b0, bi, ci, κ, m, ϖ, α, β and δ can be obtained.
The function Ks(η) assumes the following solutions.
Case 1. If δ2 − 4αβ < 0 and β ≠ 0, then
or
Case2. If δ2 − 4αβ > 0 and β ≠ 0, then
or
Case3. If δ2 − 4αβ = 0 and β ≠ 0, then
The exact soliton solutions of Eq. 1 can be obtained by substituting the values of unknowns b0, bi, ci, m, ϖ, α, β, δ and putting the solutions from Eqs 8–12 into Eq. 5 along with transformations from Eq. 3.
2.2 Extended
This method is illustrated in [7]. According to the extended
where G = G(η) and b0, bi, ci are arbitrary constants to be determined. The auxiliary equation of (13) is defined by
where ρ ≠ 1 and ϱ ≠ 0 are arbitrary constants.
The value of N can be determined by HBP [25] as illustrated in Subsection (2.1). Substituting general solution (13) along with auxiliary Eq. 14 into Eq. 4, accumulating the coefficients of
The function
Case1. If ρϱ > 0, then
Case2. If ρϱ < 0, then
Case3. If ρ = 0 and ϱ ≠ 0, then
The exact soliton solutions of Eq. 1 can be acquired by inserting the values of unknowns b0, bi, ci, m, ϖ and putting the solutions from Eqs 15–17 into Eq. 5 along with transformations from Eq. 3.
3 The Application of Methods
In this section, the MAE method and extended
3.1 The Application of MAE Method
The solutions of GSWL Eq. 1 are acquired by the following transformations,
where U(η) shows the shape of wave and κ, m, ϖ are arbitrary constants.The GSWL Eq. 1 is transformed into the following ODE by substituting the transformations from Eq. 18 into Eq. 1:
By integrating with respect to η and taking integration constant zero, Eq. 19 is simplified to
The highest order term V‴ and nonlinear term
The general solution of Eq. 20 from Eq. 5 can be expressed, as
where b0, b1 and c1 are constants to be determined. Substituting the Eq. 22 along with auxiliary Eq. 6 into Eq. 20, accumulating the coefficients of Kjs(η), (j = 0, ± 1, ± 2, ± 3, ± 4) and equating to zero, the system of algebraic equations is acquired involving b0, b1, c1, κ, m, ϖ, α, β and δ. To solve this system of linear equations simultaneously, the Maple software is used. In result, three sets of solutions for the values of constants b0, b1, c1, κ, α and β are obtained.Set1.
Set2.
Set3.
By substituting the values of unknowns from Set 1 to Set 3 into Eq. 18 and Eq. 22, the following families of soliton solutions of Eq. 1 are obtained.Family 1. The soliton solutions for Set 1 are given, as
If δ2 − 4αβ < 0 and β ≠ 0, then
or
If δ2 − 4αβ > 0 and β ≠ 0, then
or
If δ2 − 4αβ = 0 and β ≠ 0, then
where η = x + κ y + mz − ϖt. The solutions for Set 2 are given in the following Family 2.Family 2
If δ2 − 4αβ < 0 and β ≠ 0, then
or
If δ2 − 4αβ > 0 and β ≠ 0, then
or
If δ2 − 4αβ = 0 and β ≠ 0, then
where η = x + κ y + mz − wt. The solutions for Set 3 are shown in the following Family 3.Family 3
If δ2 − 4αβ < 0 and β ≠ 0, then
or
If δ2 − 4αβ > 0 and β ≠ 0, then
or
If δ2 − 4αβ = 0 and β ≠ 0, then
where η = x + κy + mz − ϖt.
3.2 The Application of Extended
In this method, the formal solution of Eq. 20 for value of N = 1 is given, as
where G = G(η), η = x + κy + mz − ϖt and constants b0, b1, c1 are to be determined. By inserting the Eq. 44 along with auxiliary Eq. 14 into Eq. 20, collecting the coefficients of
Set2.
Set3.
By substituting the values of unknown constants from Set 1 to Set 3 into Eq. 18 and Eq.(44), the following families of solutions of Eq. 1 are obtained.
Family 1. The soliton solutions for Set 1 are given, as
If ρϱ > 0, then
If ρϱ < 0, then
If ρ = 0 and ϱ ≠ 0, then
where
If ρϱ > 0, then
If ρϱ < 0, then
If ρ = 0 and ϱ ≠ 0, then
where
If ρϱ > 0, then
If ρϱ < 0, then
If ρ = 0 and ϱ ≠ 0, then
where
4 Graphical Explanation of Solutions
In this section, some of the obtained solutions are plotted as 3D surface, 2D contour graphs and 2D graphs. Since the retrieved solutions include rational, hyperbolic and trigonometric functions, therefore the most of the graphs show kink soliton solution, periodic soliton solution and singular soliton solutions, which are plotted in Figures 1–6. These graphs are drawn for the suitable values assigned to parameters. The graph of (3 + 1)-dimensional function ψ(x, y, z, t) cannot be plotted in three dimensional space. To plot the graph of this function, constant values are assigned to space variables y and z. The vertical axes of 3D graphs represent the values of function ψ. The determined values of parameters b0, κ, δ, α, β, m, D, E and w can be taken from the corresponding set to the families. The line graphs are plotted using fixed value of time variable t = 1.
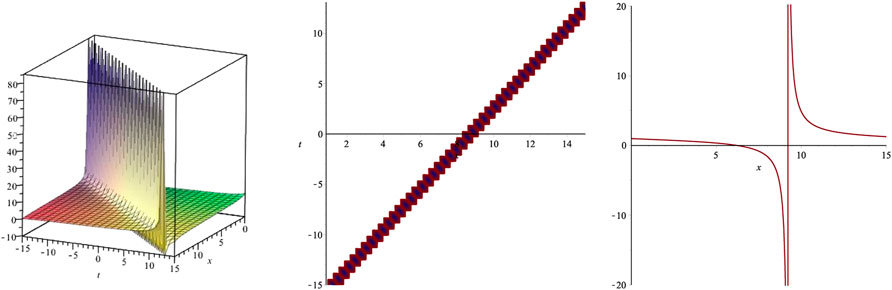
FIGURE 1.
5 Results and Discussion
In this paper, SWL equation is examined using two exact methods, MAE method and extended
The utilized mathematical techniques enable to construct possible variety of soliton solutions for arbitrary initial condition. The obtained solutions are useful to learn various kinds of wave structures which may be observed in any physical system governed by the GSWL equation. The physical structure of the waves expressed by the obtained solutions can be seen using graphical illustration. The 3D graphs of some of the retrieved solutions have been presented to show the shape of the corresponding wave. The graphs have been plotted using some suitable choice of parameters as described in the last section. The retrieved graphs depict a variety of physical behaviors depicting kink, periodic and bright-dark solitons which may appear in many phenomena involving shallow water waves.
Figure 2 represents kink soliton solution as the graph of the function
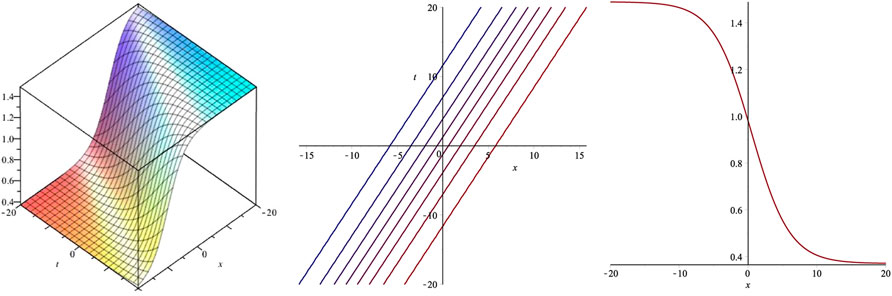
FIGURE 2.
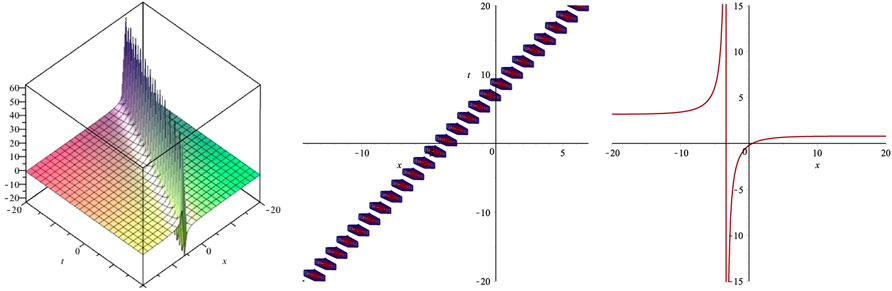
FIGURE 3.
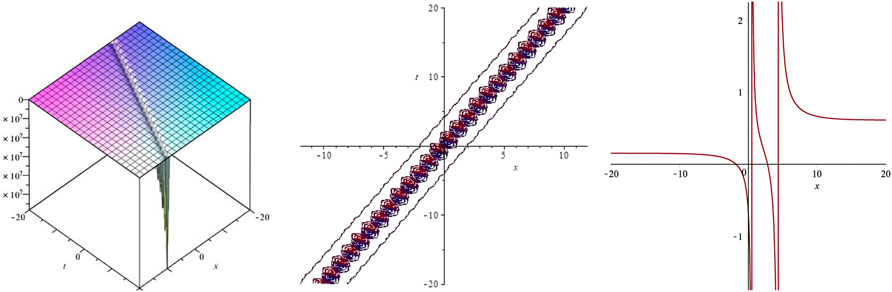
FIGURE 4.
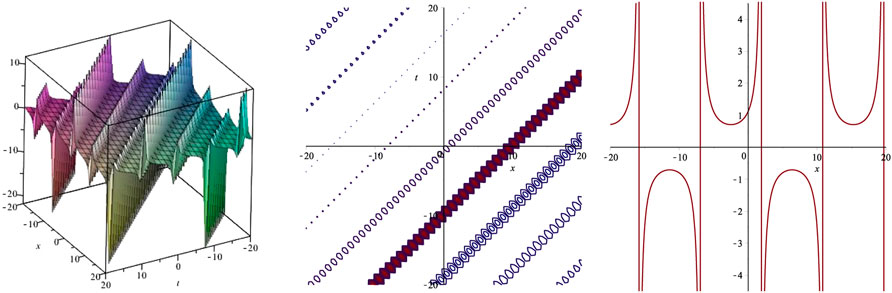
FIGURE 5.

FIGURE 6.
6 Conclusion
In this paper, the GSWL equation is discussed by MAE method and extended
Data Availability Statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding authors.
Author Contributions
GA: Conceptualization, Methodology, Validation, Supervision, Visualization, Investigation. MS: Methodology, Validation, Investigation, Visualization, Writing- Reviewing and Editing. MK: Data Curation, Conceptualization, Methodology, Software, Writing- Original draft preparation.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1. Kudryashov NA. Nonlinear Waves on Water and Theory of Solitons. J Eng Phys Thermophys (1999) 72(6):1224–35. doi:10.1007/bf02699470
2. Kochanov MB, Kudryashov NA, Sinel'shchikov DI. Non-linear Waves on Shallow Water under an Ice Cover. Higher Order Expansions. J Appl Mathematics Mech (2013) 77(1):25–32. doi:10.1016/j.jappmathmech.2013.04.004
3. Kudryashov NA, Soukharev MB, Demina MV. Elliptic Traveling Waves of the Olver Equation. Commun Nonlinear Sci Numer Simulation (2012) 17(11):4104–14. doi:10.1016/j.cnsns.2012.01.033
4. Nisar KS, Ilhan OA, Abdulazeez ST, Manafian J, Mohammed SA, Osman MS. Novel Multiple Soliton Solutions for Some Nonlinear PDEs via Multiple Exp-Function Method. Results Phys (2021) 21:103769. doi:10.1016/j.rinp.2020.103769
5. Seadawy AR, Lu D, Khater MAM. New Wave Solutions for the Fractional-Order Biological Population Model, Time Fractional Burgers, Drinfeld-Sokolov-Wilson and System of Shallow Water Wave Equations and Their Applications. Eur J Comput Mech (2017) 26(5-6):508–24. doi:10.1080/17797179.2017.1374233
6. Yue C, Lu D, Khater MMA. Abundant Wave Accurate Analytical Solutions of the Fractional Nonlinear Hirota-Satsuma-Shallow Water Wave Equation. Fluids (2021) 6(7):235. doi:10.3390/fluids6070235
7. Guo S, Zhou Y. The Extended -expansion Method and its Applications to the Whitham-broer-kaup-like Equations and Coupled Hirota-Satsuma KdV Equations (G′/G2) -expansion Method and its Applications to the Whitham-broer-kaup-like Equations and Coupled Hirota-Satsuma KdV Equations. Appl Mathematics Comput (2010) 215(9):3214–21. doi:10.1016/j.amc.2009.10.008
8. Gao Y-T, Tian B. Generalized Tanh Method with Symbolic Computation and Generalized Shallow Water Wave Equation. Comput Mathematics Appl (1997) 33(4):115–8. doi:10.1016/s0898-1221(97)00011-4
9. Zayed EME, Elshater MEM. Jacobi Elliptic Solutions, Soliton Solutions and Other Solutions to Four Higher-Order Nonlinear Schrodinger Equations Using Two Mathematical Methods. Optik (2017) 131:1044–62. doi:10.1016/j.ijleo.2016.11.120
10. Zhou Q, Ekici M, Sonmezoglu A, Mirzazadeh M. Optical Solitons with Biswas-Milovic Equation by Extended G′/G-expansion Method. Optik (2016) 127(16):6277–90. doi:10.1016/j.ijleo.2016.04.119
11. Kudryashov NA. Model of Propagation Pulses in an Optical Fiber with a New Law of Refractive Indices. Optik (2021) 248:168160. doi:10.1016/j.ijleo.2021.168160
12. Kudryashov NA, Loguinova NB. Extended Simplest Equation Method for Nonlinear Differential Equations. Appl Mathematics Comput (2008) 205(1):396–402. doi:10.1016/j.amc.2008.08.019
13. Miah MM, Ali HMS, Akbar A, Wazwaz MA. Some Applications of the (G′/G, 1/G)-expansion Method to Find New Exact Solutions of NLEEs. The Eur Phys J Plus (2017) 132(6):1–15. doi:10.1140/epjp/i2017-11571-0
14. Dusunceli F. New Exact Solutions for Generalized (3+1) Shallow Water-like (SWL) Equation. Appl Mathematics Nonlinear Sci (2019) 4(2):365–70. doi:10.2478/amns.2019.2.00031
15. Wazwaz A-M. Solitary Wave Solutions of the Generalized Shallow Water Wave (GSWW) Equation by Hirota's Method, Tanh-Coth Method and Exp-Function Method. Appl Mathematics Comput (2008) 202(1):275–86. doi:10.1016/j.amc.2008.02.013
16. Sadaf M, Akram G. Effects of Fractional Order Derivative on the Solution of Time-Fractional Cahn-Hilliard Equation Arising in Digital Image Inpainting. Indian J Phys (2021) 95:891–9. doi:10.1007/s12648-020-01743-1
17. Mahak N, Akram G. Exact Solitary Wave Solutions by Extended Rational Sine-Cosine and Extended Rational Sinh-Cosh Techniques. Phys Scr (2019) 94(11):115212. doi:10.1088/1402-4896/ab20f3
18. Akram G, Sadaf M, Anum N. Solutions of Time-Fractional Kudryashov-Sinelshchikov Equation Arising in the Pressure Waves in the Liquid with Gas Bubbles. Opt Quan Electronics (2017) 49(11):1–16. doi:10.1007/s11082-017-1202-5
19. Ekici M, Zhou Q, Sonmezoglu A, Moshokoa SP, Ullah MZ, Biswas A, et al. Solitons in Magneto-Optic Waveguides by Extended Trial Function Scheme. Superlattices and Microstructures (2017) 107:197–218. doi:10.1016/j.spmi.2017.04.021
20. Vendhan CP. A Study of Berger Equations Applied to Non-linear Vibrations of Elastic Plates. Int J Mech Sci (1975) 17:461–8. doi:10.1016/0020-7403(75)90045-4
21. Tariq H, Akram G. New Traveling Wave Exact and Approximate Solutions for the Nonlinear Cahn-Allen Equation: Evolution of a Nonconserved Quantity. Nonlinear Dyn (2017) 88(1):581–94. doi:10.1007/s11071-016-3262-7
22. Akram G, Sadaf M, Khan MAU. Abundant Optical Solitons for Lakshmanan-Porsezian-Daniel Model by the Modified Auxiliary Equation Method. Optik (2022) 251:168163. doi:10.1016/j.ijleo.2021.168163
23. Sadaf GAM, Khan MAU. Soliton Solutions of Lakshmanan-Porsezian-Daniel Model Using Modified Auxiliary Equation Method with Parabolic and Anti-cubic Law of Nonlinearities. Optik: Int J Light Electron Opt (2022) 252:168372. doi:10.1016/j.ijleo.2021.168372
24. Osman MS, Lu D, Khater MMA, Attia RAM. Complex Wave Structures for Abundant Solutions Related to the Complex Ginzburg-Landau Model. Optik (2019) 192:162927. doi:10.1016/j.ijleo.2019.06.027
Keywords: the generalized shallow water like equation, MAE method, extended (G′/G2)-expansion method, solitary wave solutions, exact solutions
Citation: Akram G, Sadaf M and Khan MAU (2022) Soliton Dynamics of the Generalized Shallow Water Like Equation in Nonlinear Phenomenon. Front. Phys. 10:822042. doi: 10.3389/fphy.2022.822042
Received: 25 November 2021; Accepted: 09 February 2022;
Published: 23 March 2022.
Edited by:
Lev Shchur, Landau Institute for Theoretical Physics, RussiaReviewed by:
Sergey Moiseenko, Space Research Institute (RAS), RussiaSergey Dmitrievich Glyzin, Yaroslavl State University, Russia
Copyright © 2022 Akram, Sadaf and Khan. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Ghazala Akram, toghazala2003@yahoo.com; Maasoomah Sadaf, maasoomah.math@pu.edu.pk; M. Atta Ullah Khan, attaniazi271@gmail.com