
Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions

 ,
,  ,
,  ,
,  and
and 
Abstract
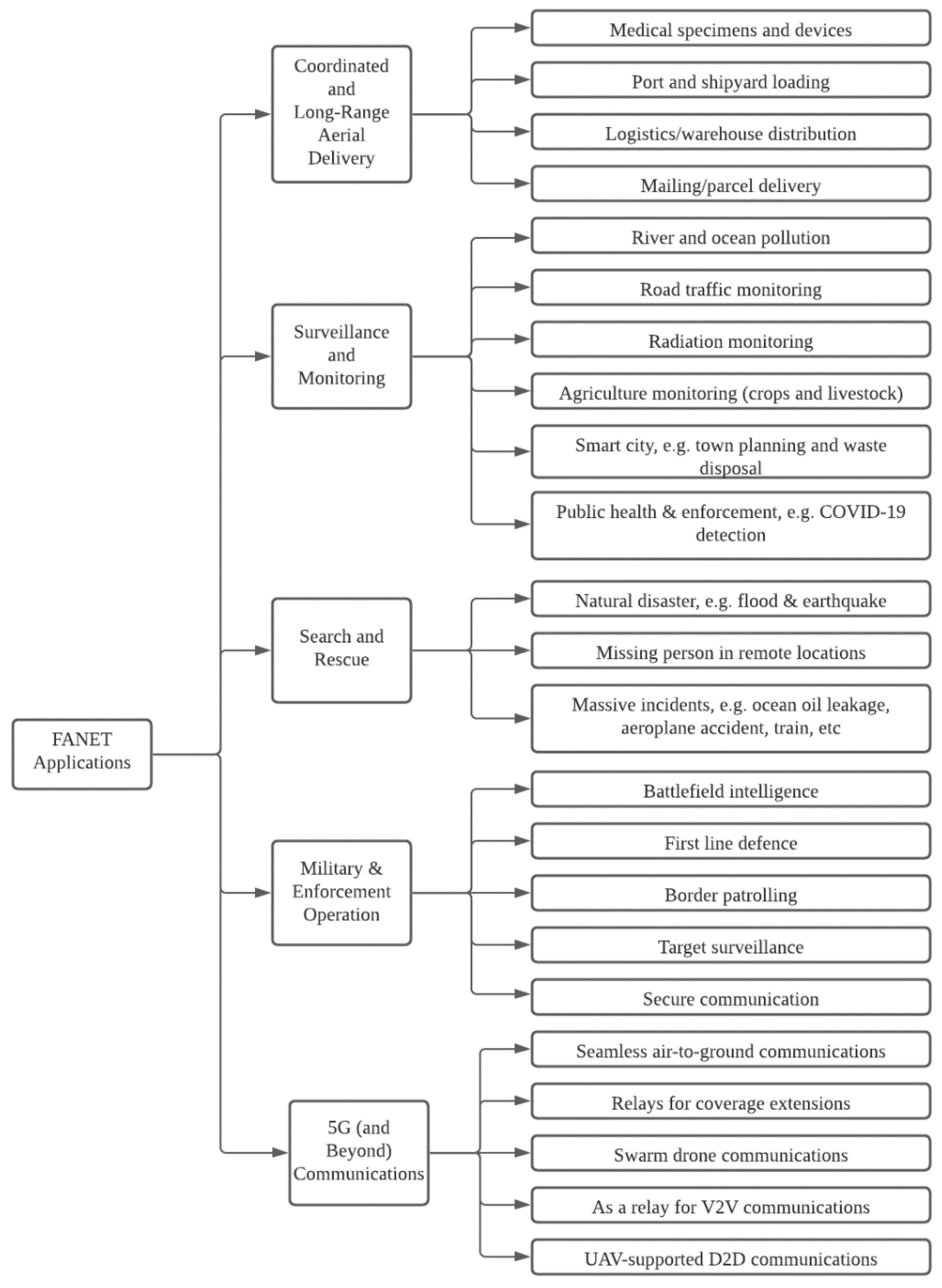
:1. Introduction
- An in-depth look into existing topology-based routing protocols in FANETs. A review and comparison of topology-aware routing protocols explicitly designed for FANETs with other studies considering classical rioting protocols is presented.
- Topology-based routing protocols classification for FANETs using the fundamental routing mechanisms. There are 22 topology-based routing protocols studied and described, both existing and recent.
- The reviewed topology-based routing protocols are compared qualitatively on the main features, routing mechanism, limitations, mobility models, simulation tools, performance parameters, and application scenarios. Existing studies do not consider all these parameters in comparative analysis. Moreover, engineers and researchers may find this comparison useful in deciding which topology-based routing protocol is appropriate for their needs.
- The most critical research challenges and issues in developing a topology-based routing technique for FANETs are updated based on this field’s current active research progress.
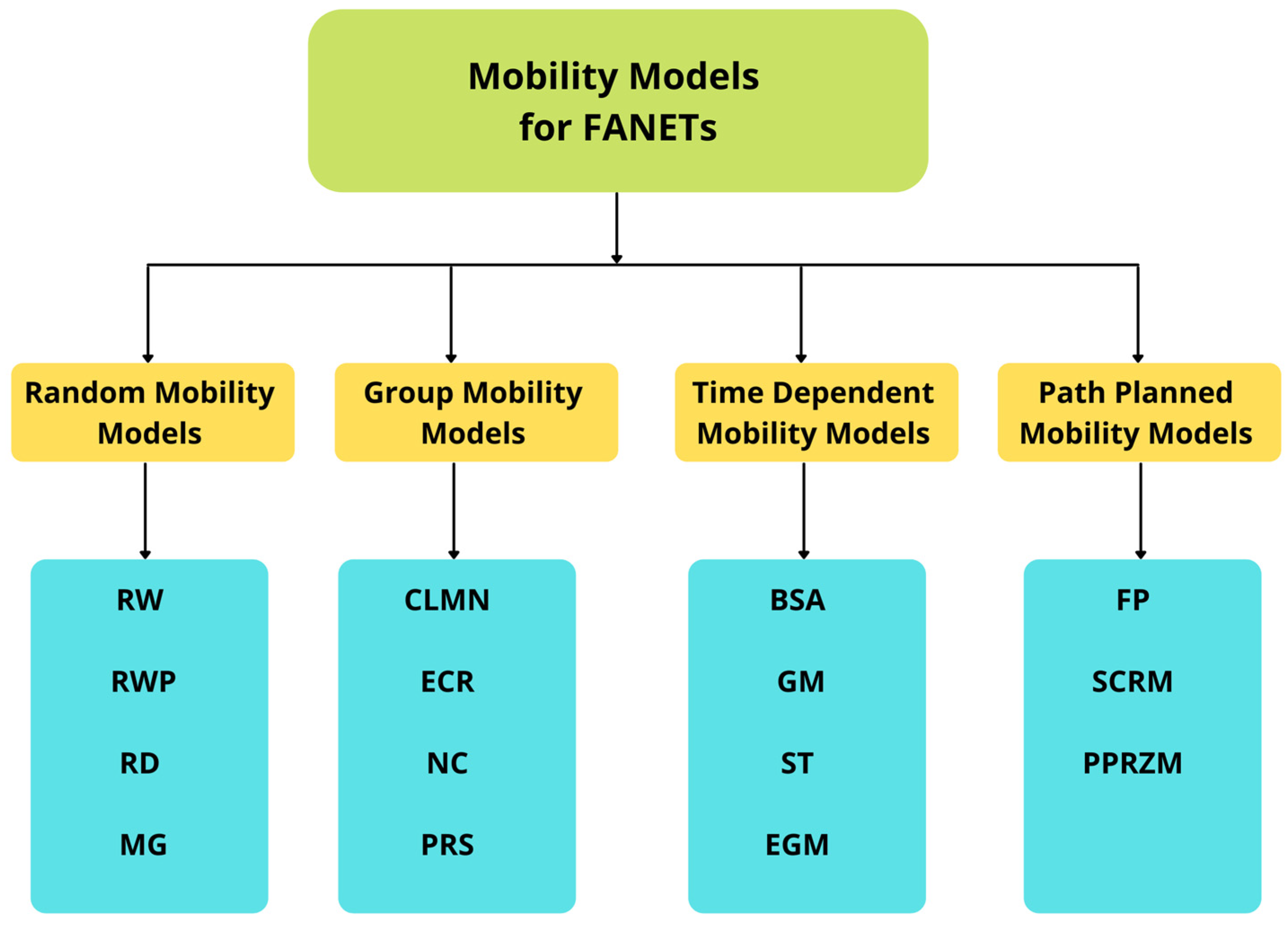
2. Mobility Models in FANETs
2.1. Random Mobility Models
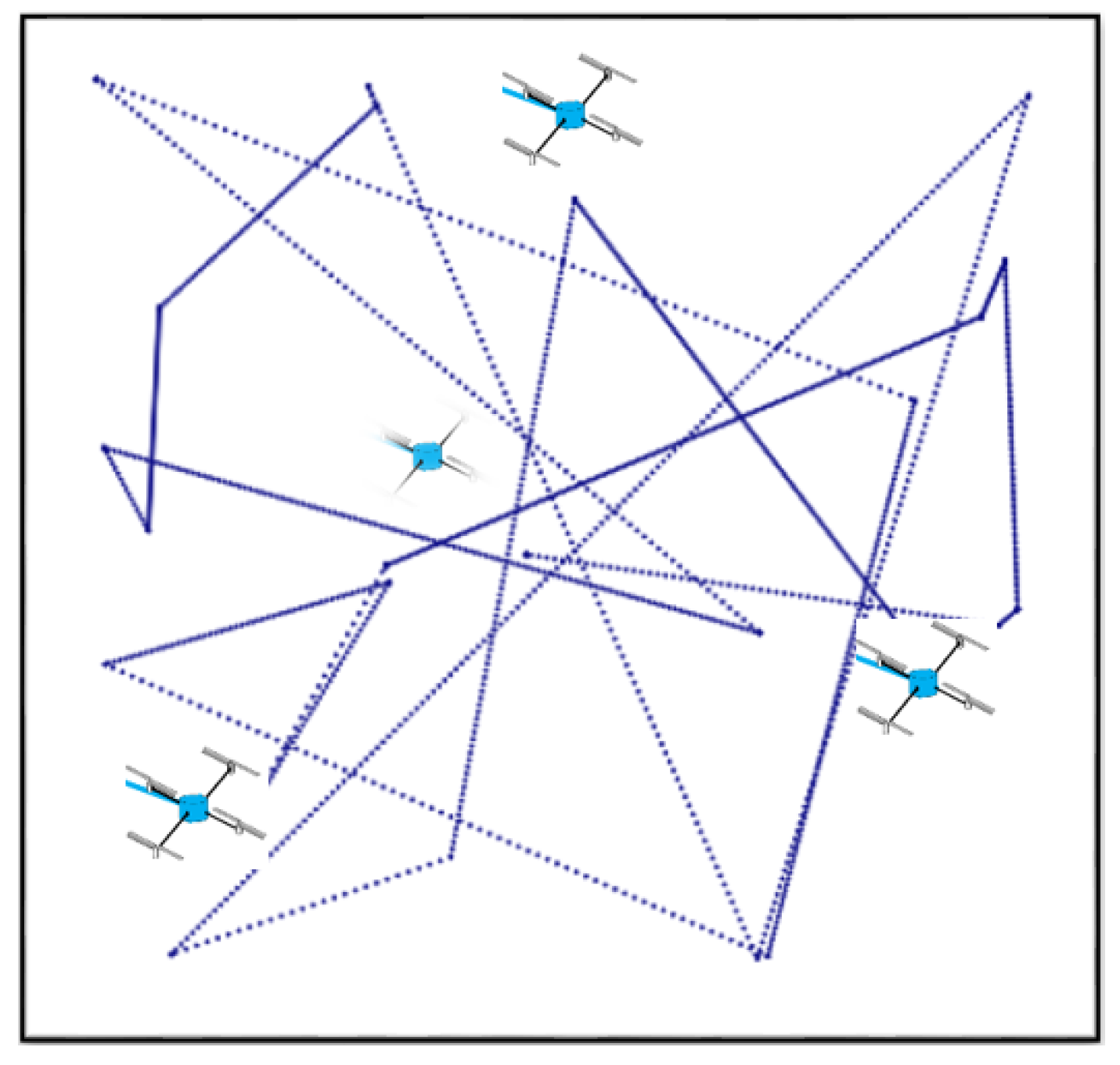
2.1.1. Random Walk
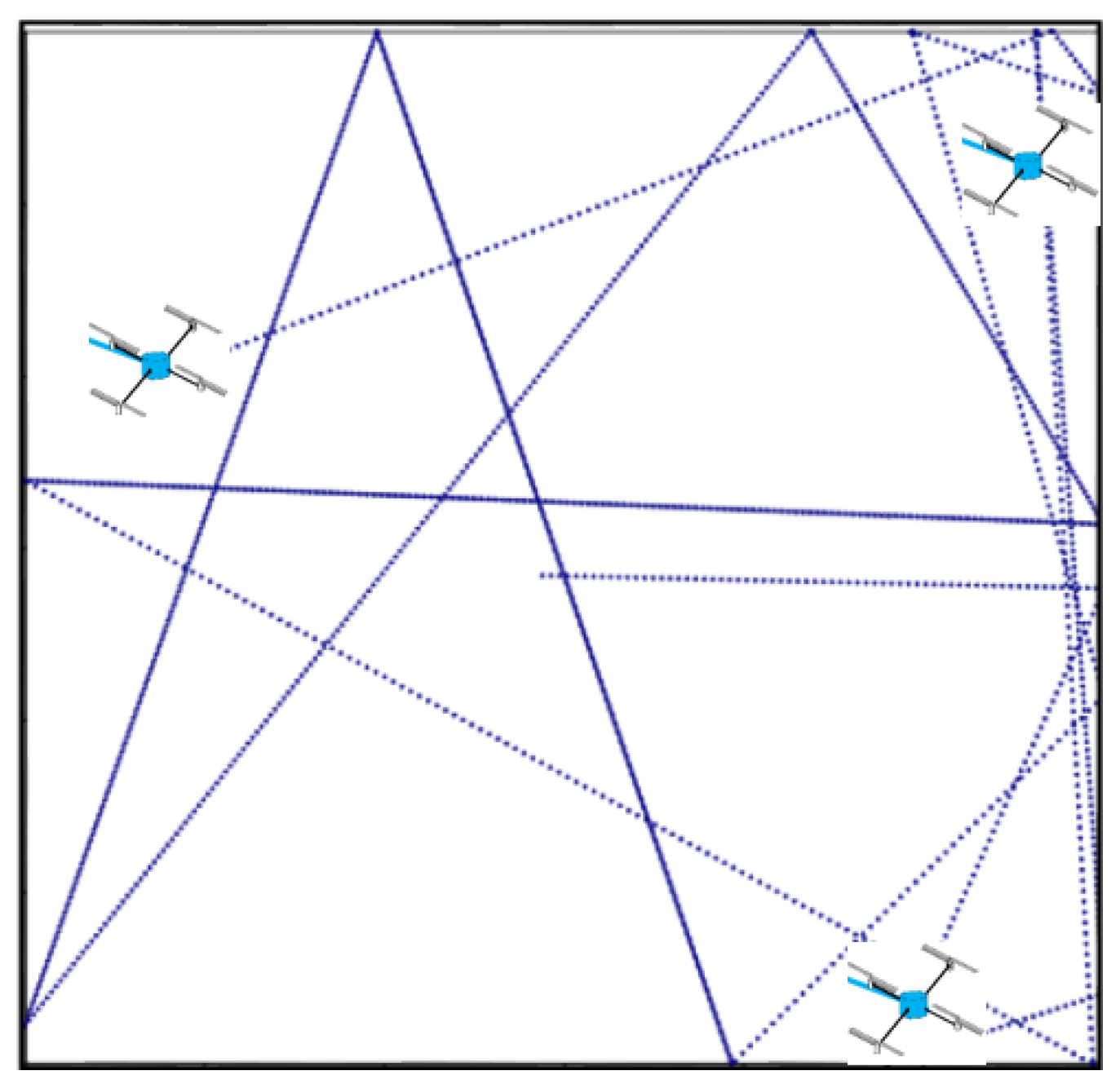
2.1.2. Random Waypoint
2.1.3. Random Direction
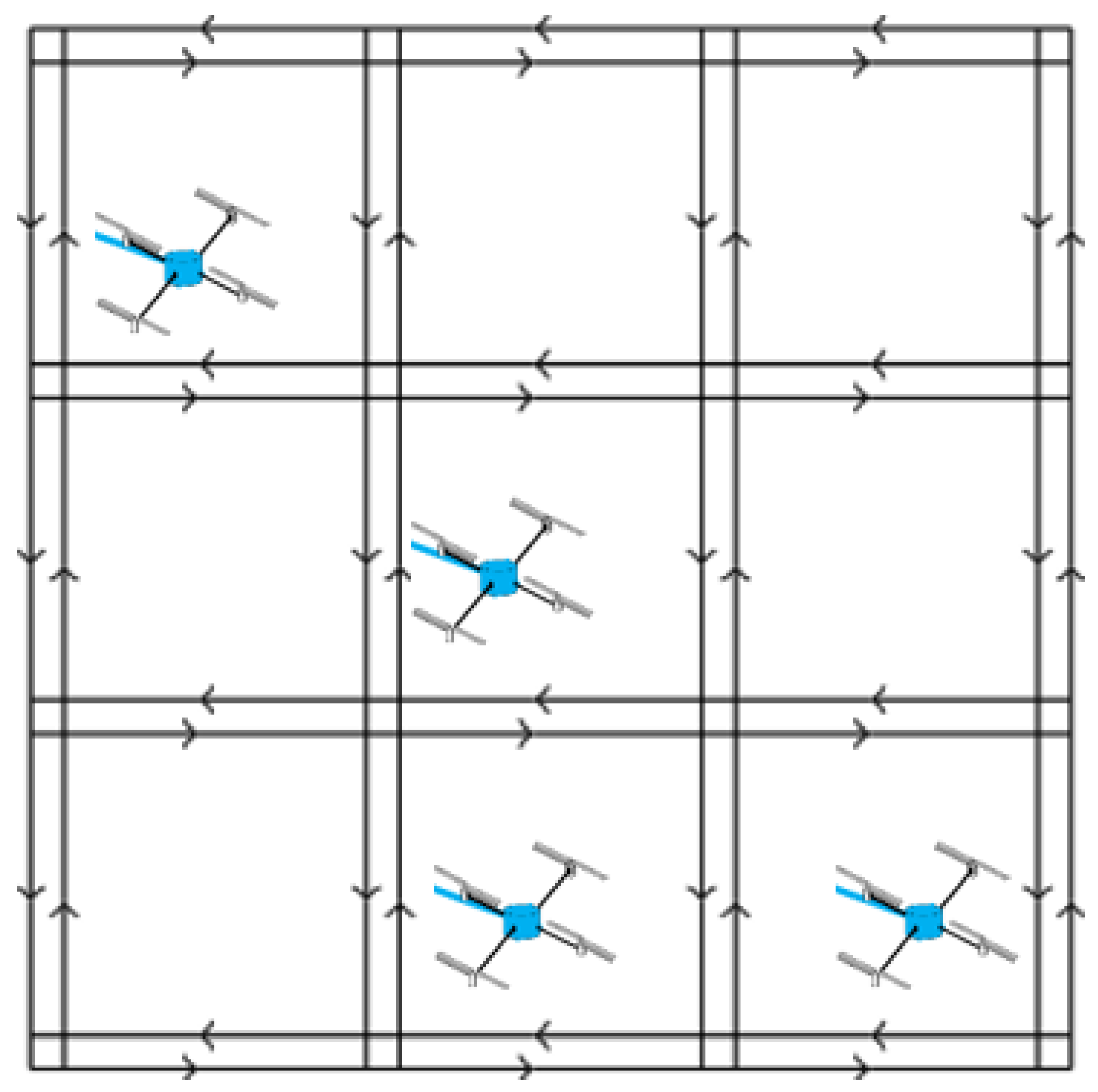
2.1.4. Manhattan Grid
2.2. Group Mobility Models
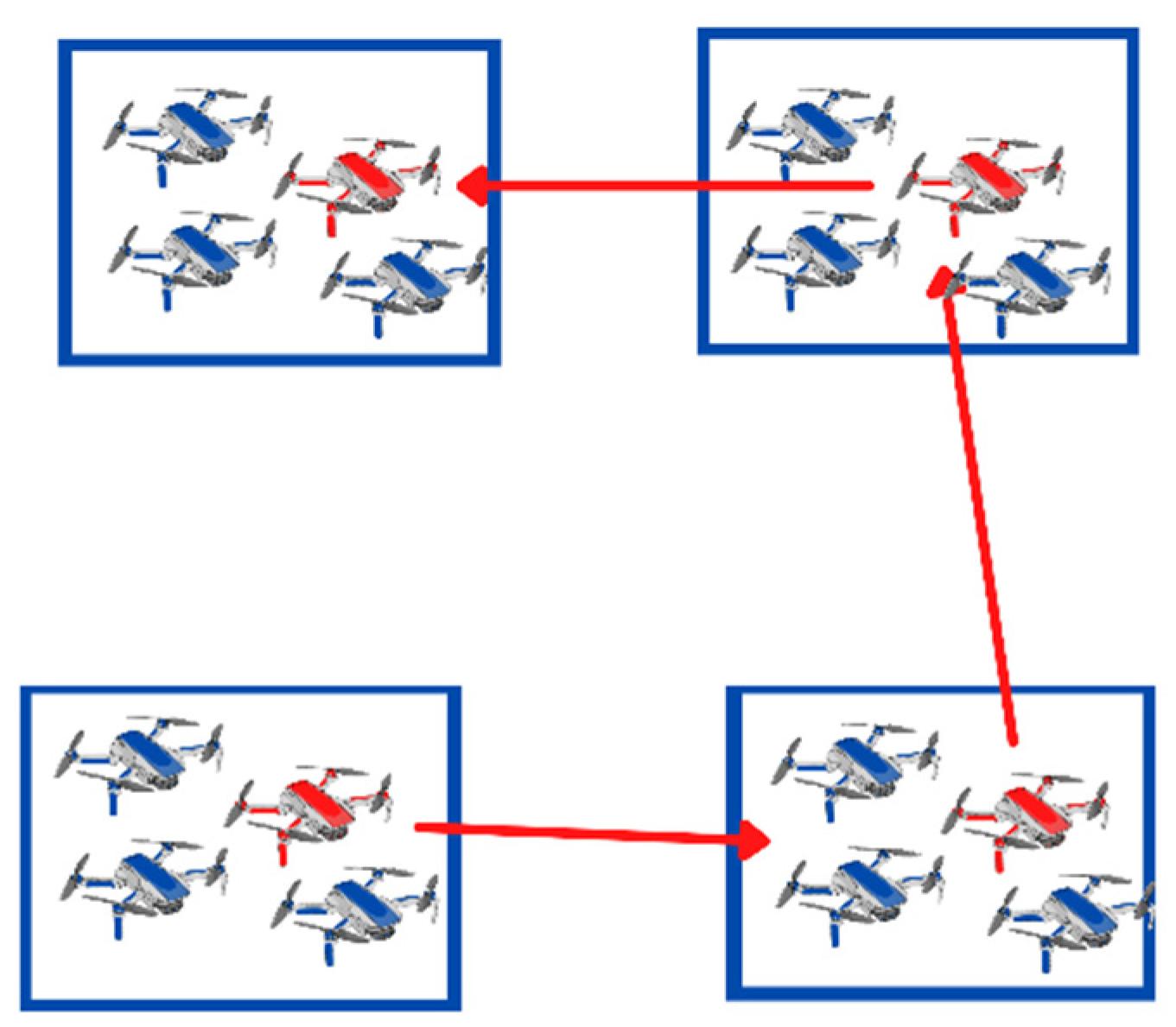
2.2.1. Column Mobility Model
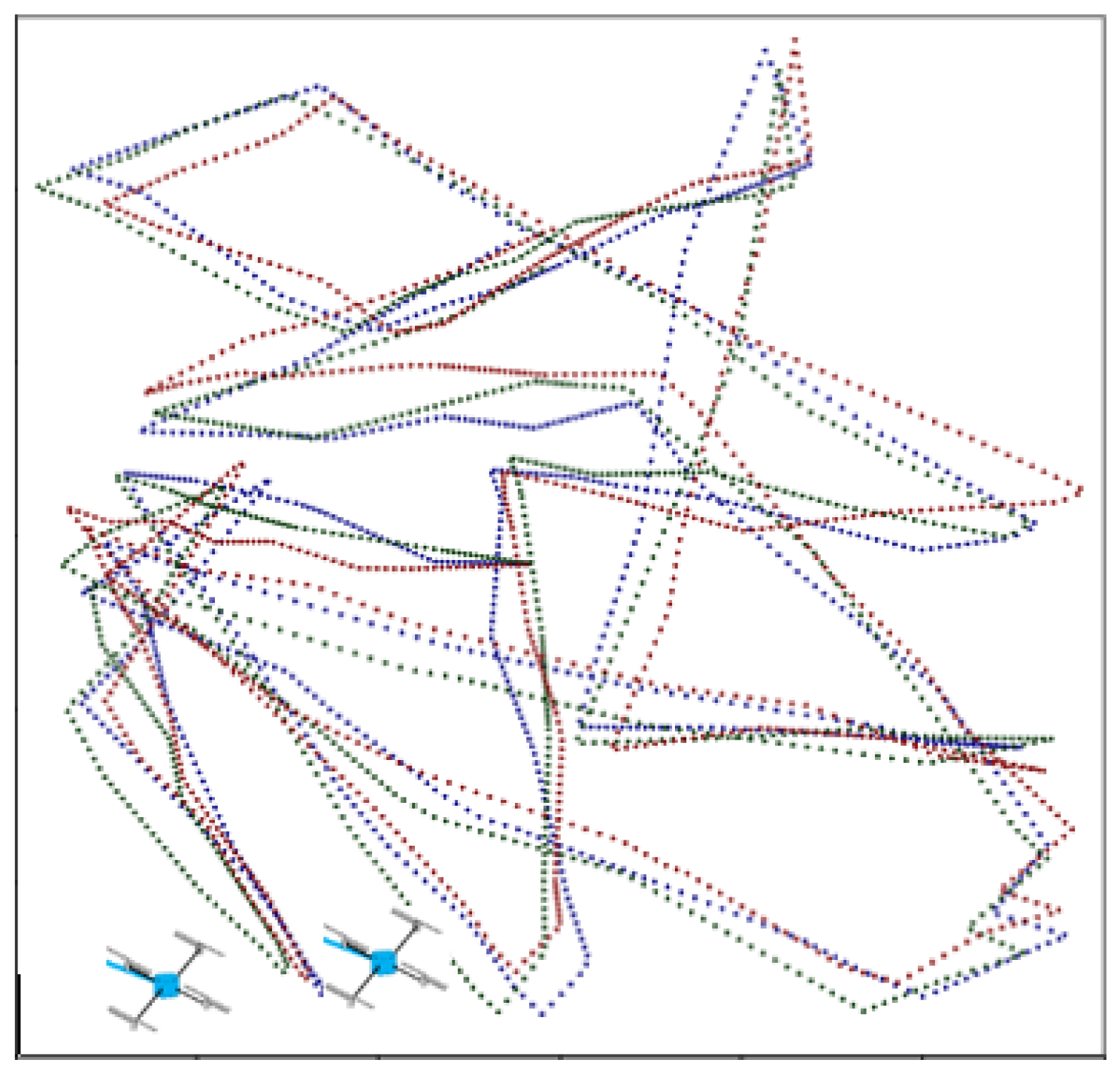
2.2.2. Exponential Correlated Random
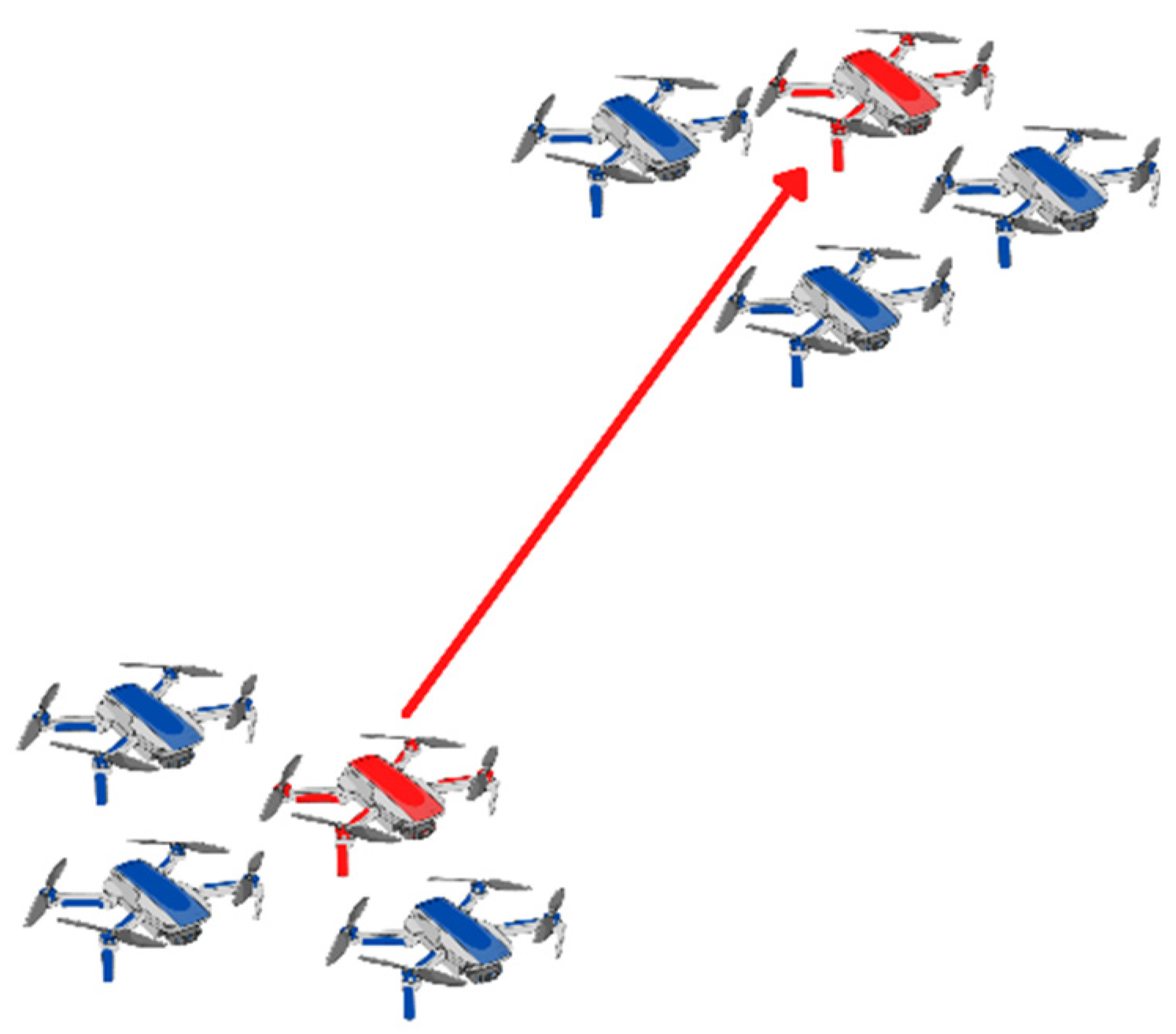
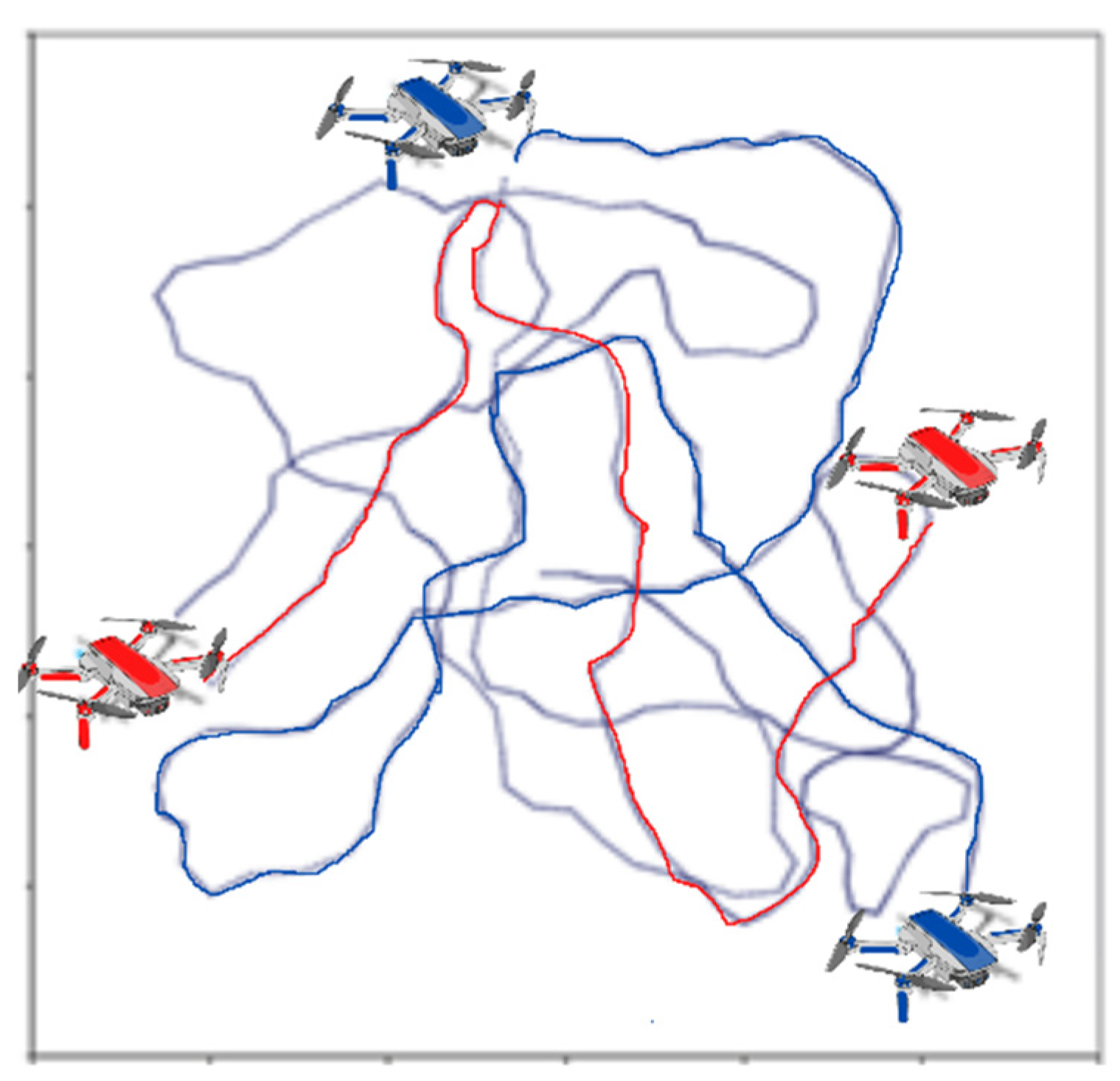
2.2.3. Nomadic Community
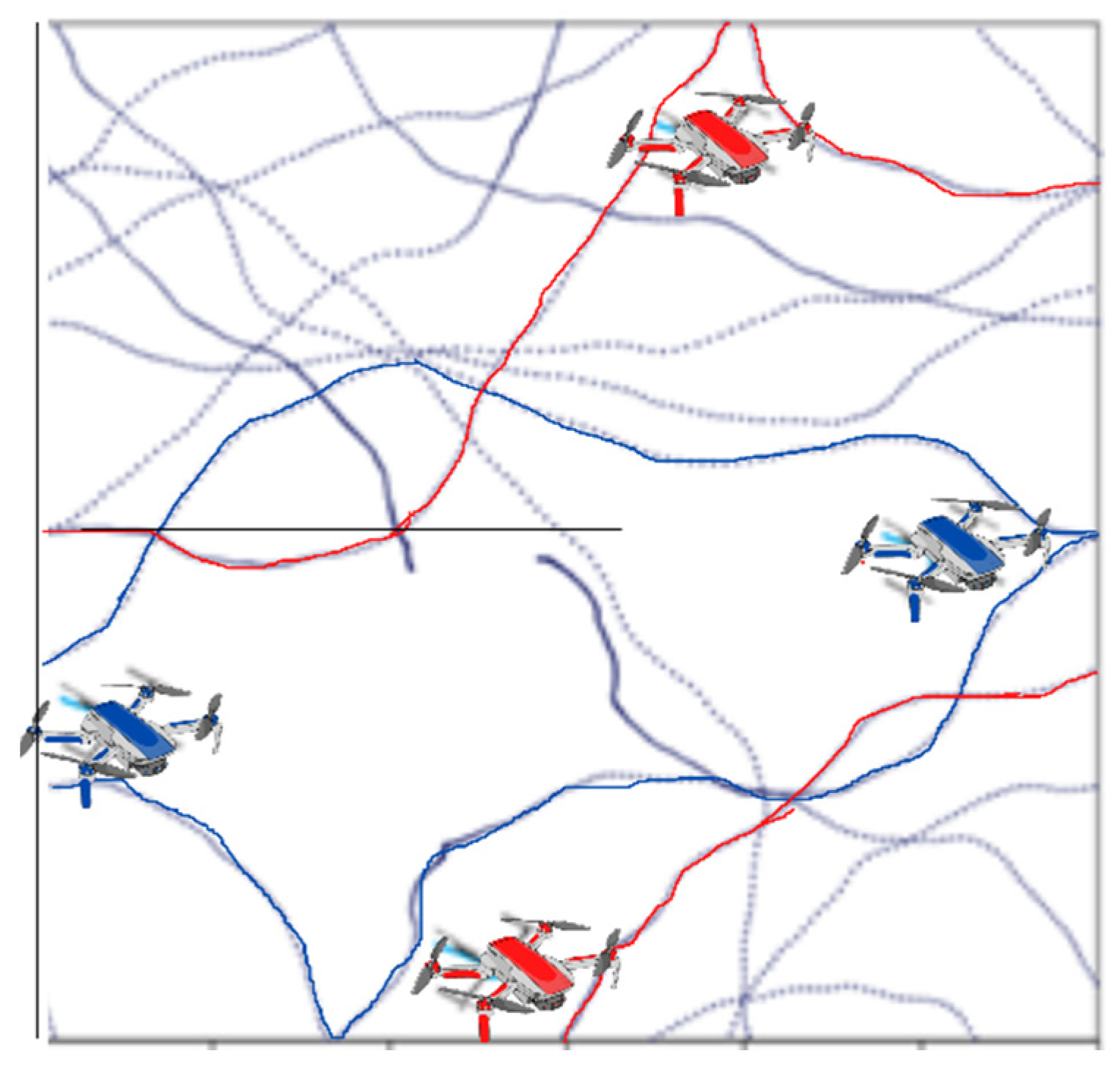
2.2.4. Pursue Mobility Model
2.3. Time-Dependent Mobility Model
2.3.1. Boundless Simulation Area
2.3.2. Gauss Markov
2.3.3. Smooth Turn
2.3.4. Enhanced Gauss Markov
2.4. Path Planned Mobility Models
2.4.1. Flight Plan
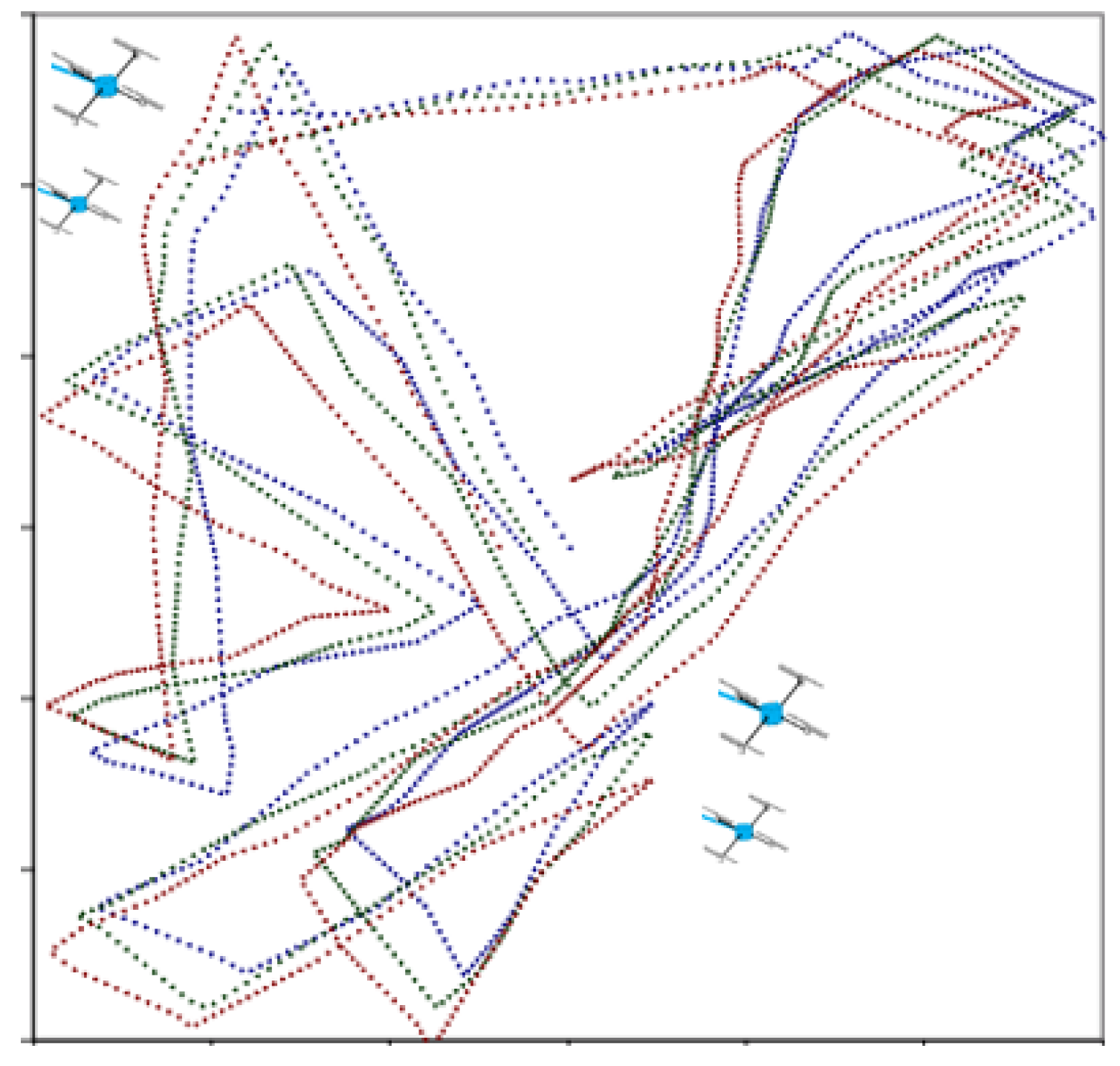
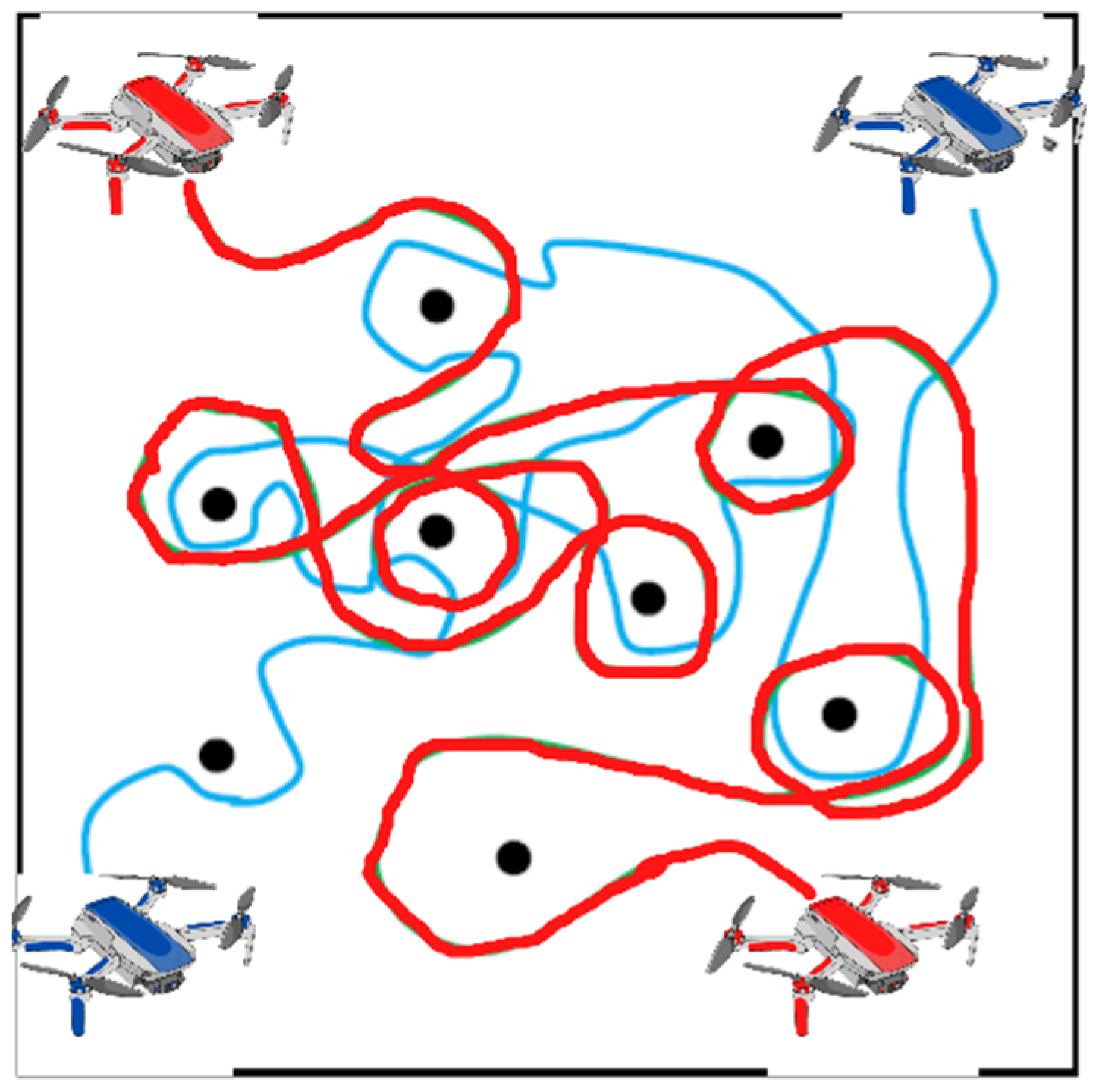
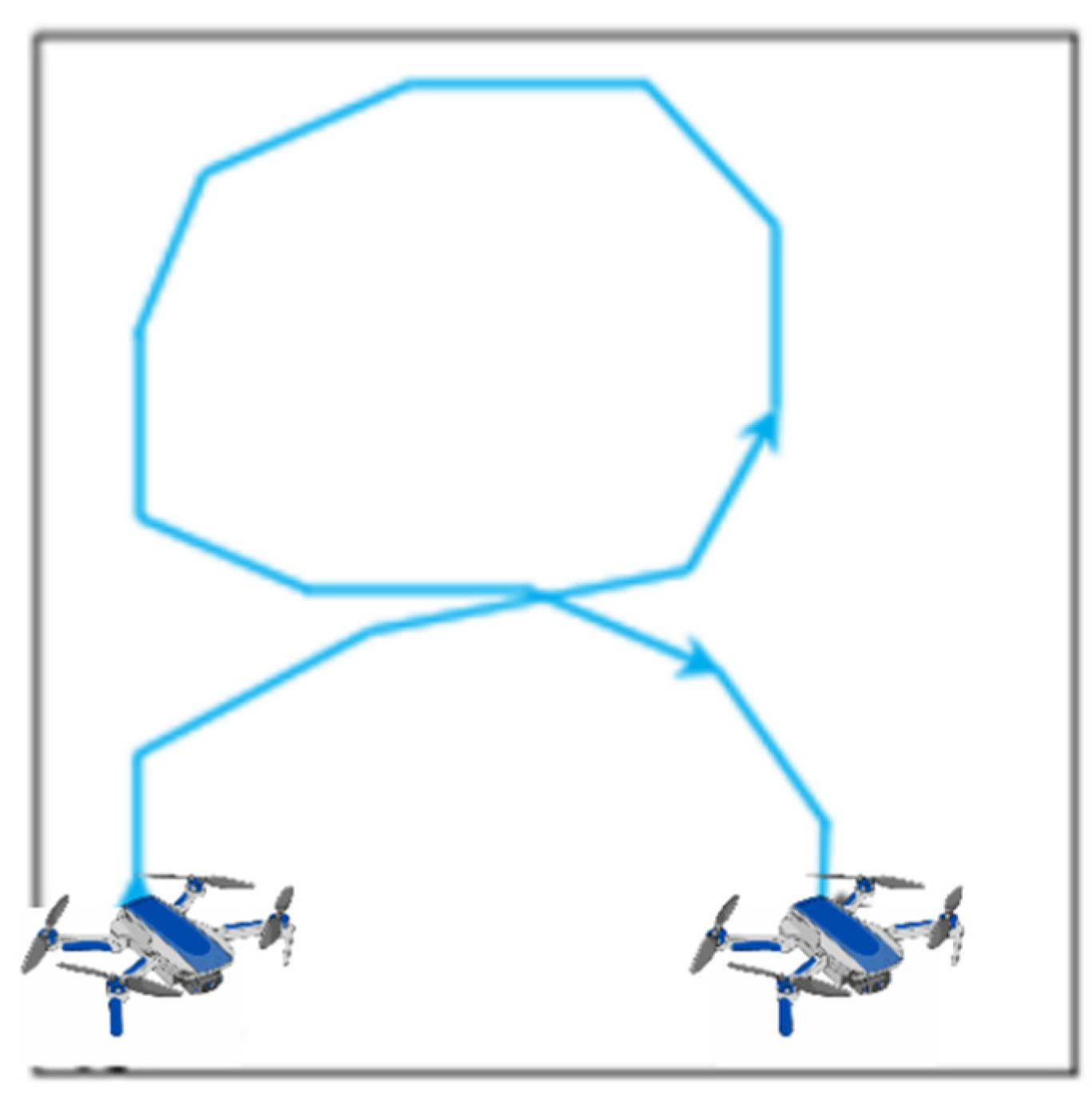
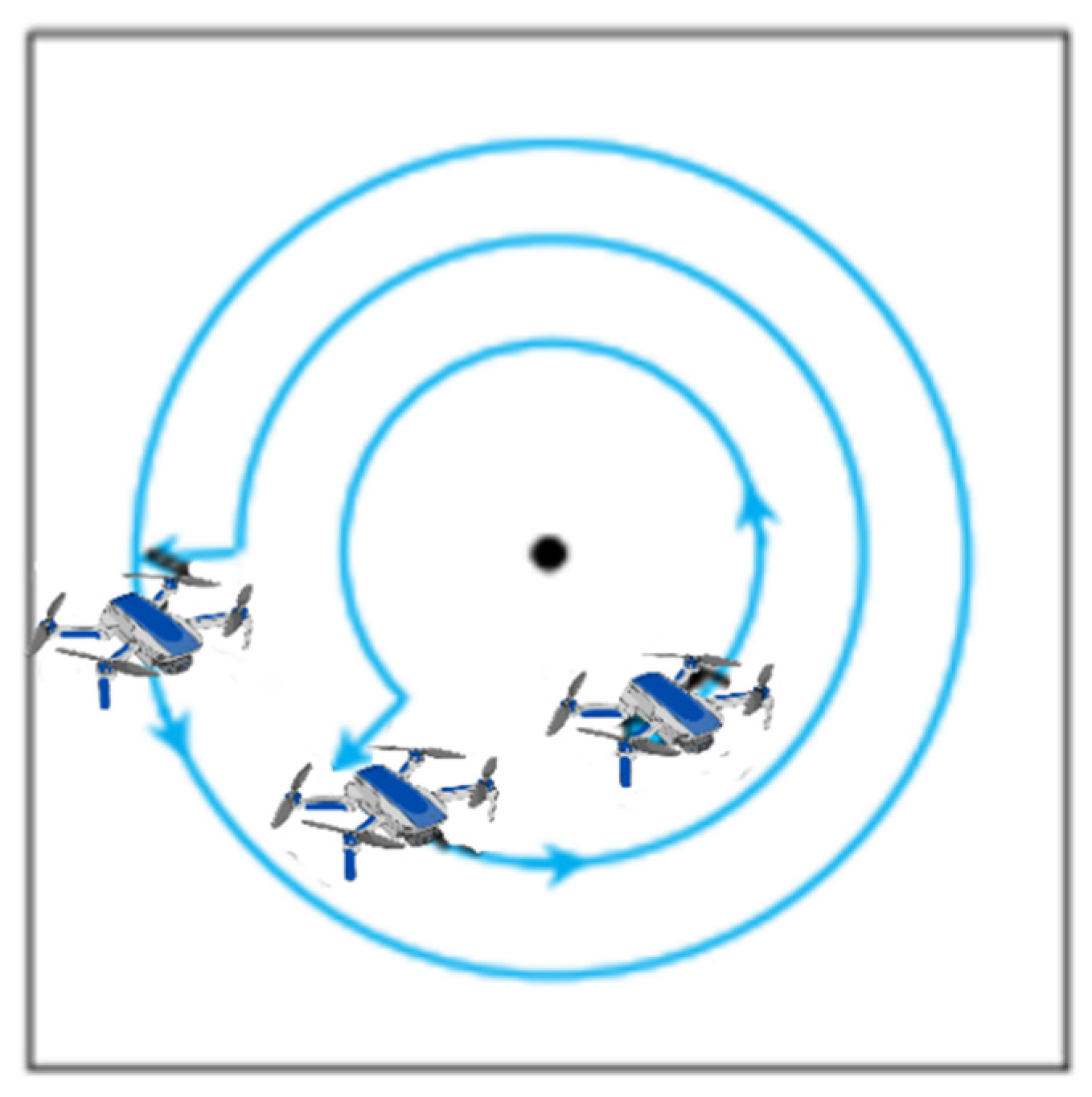
2.4.2. Semi Random Circular Movement
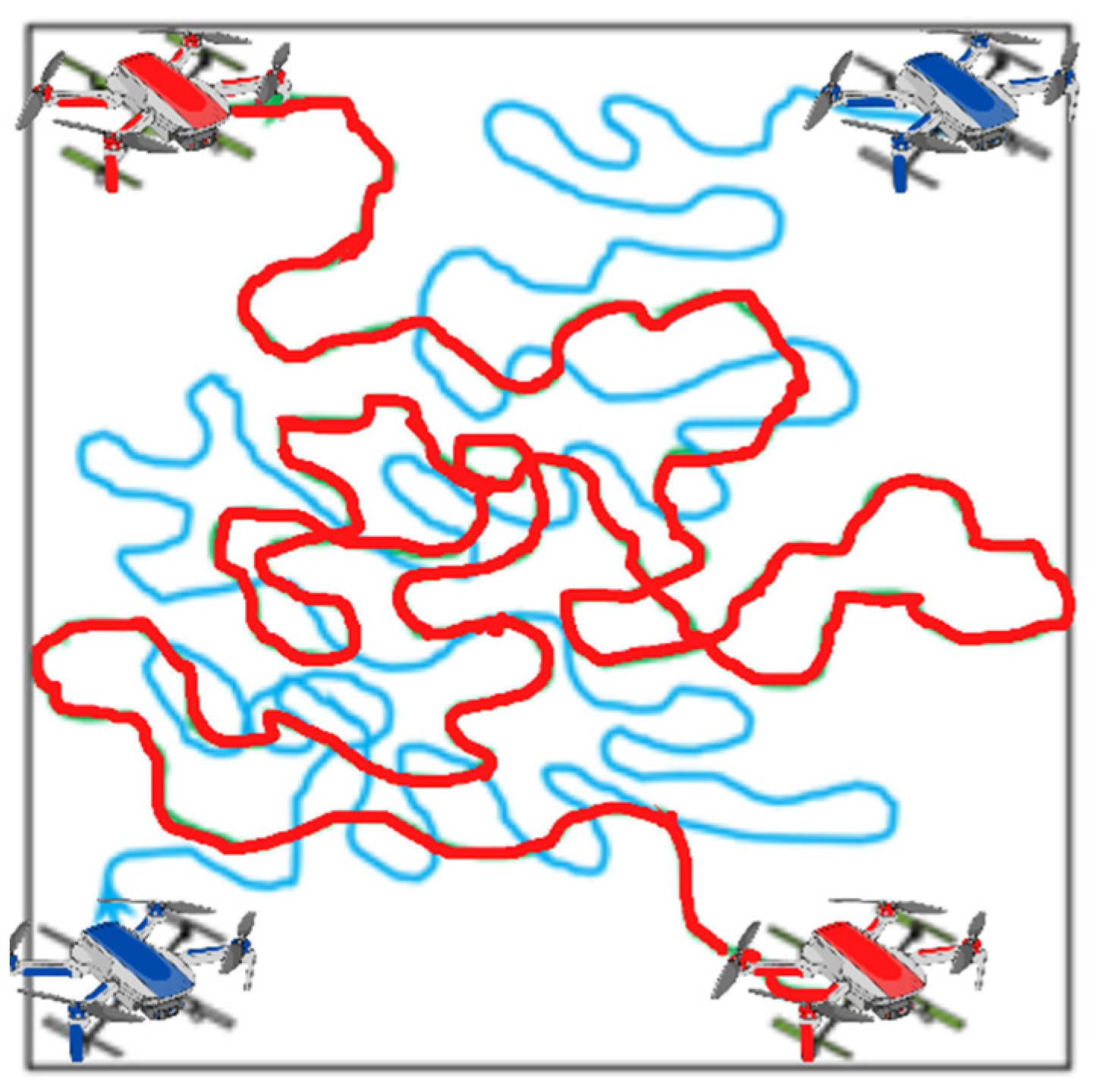
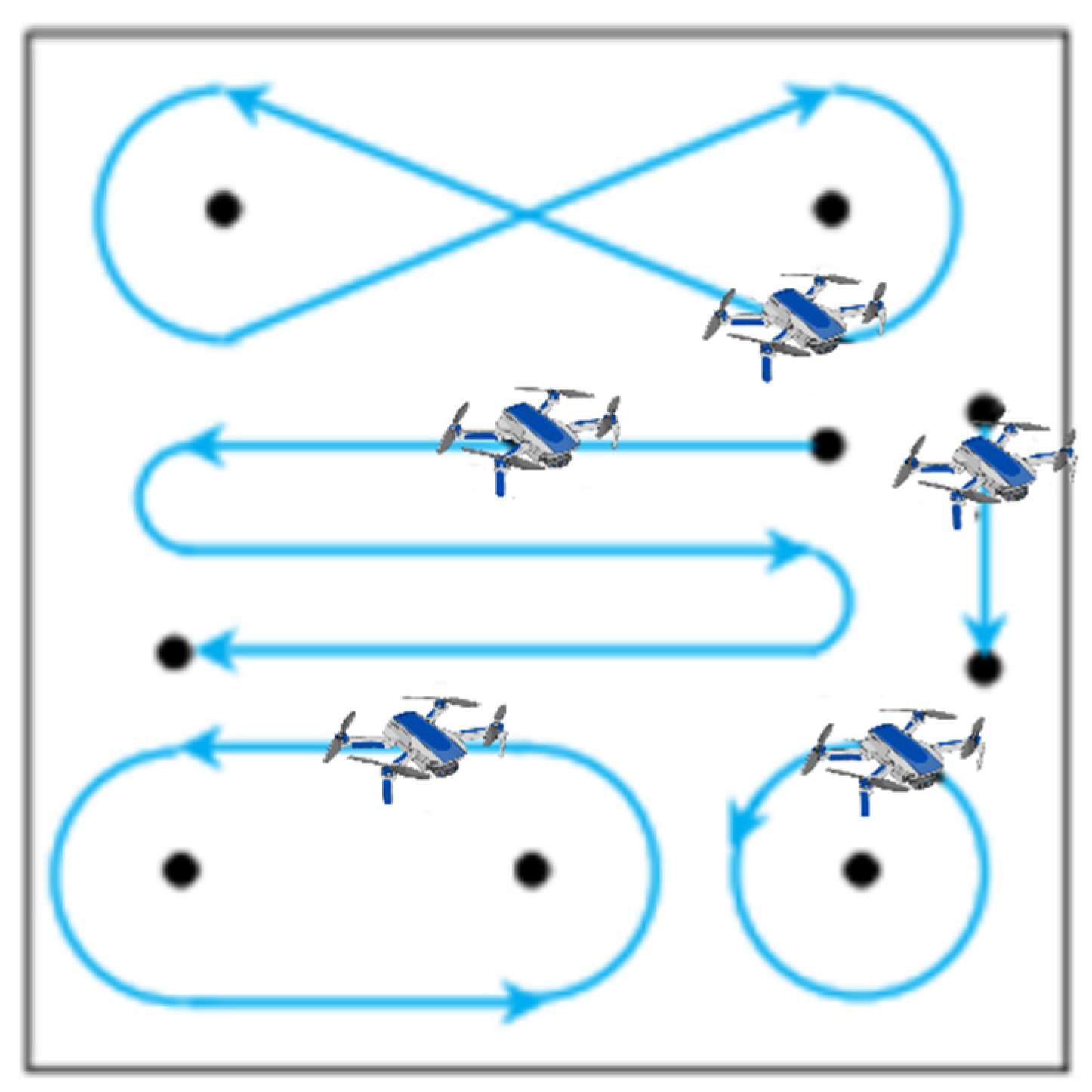
2.4.3. Paparazzi
2.5. Comparison of Existing Mobility Models for FANETs
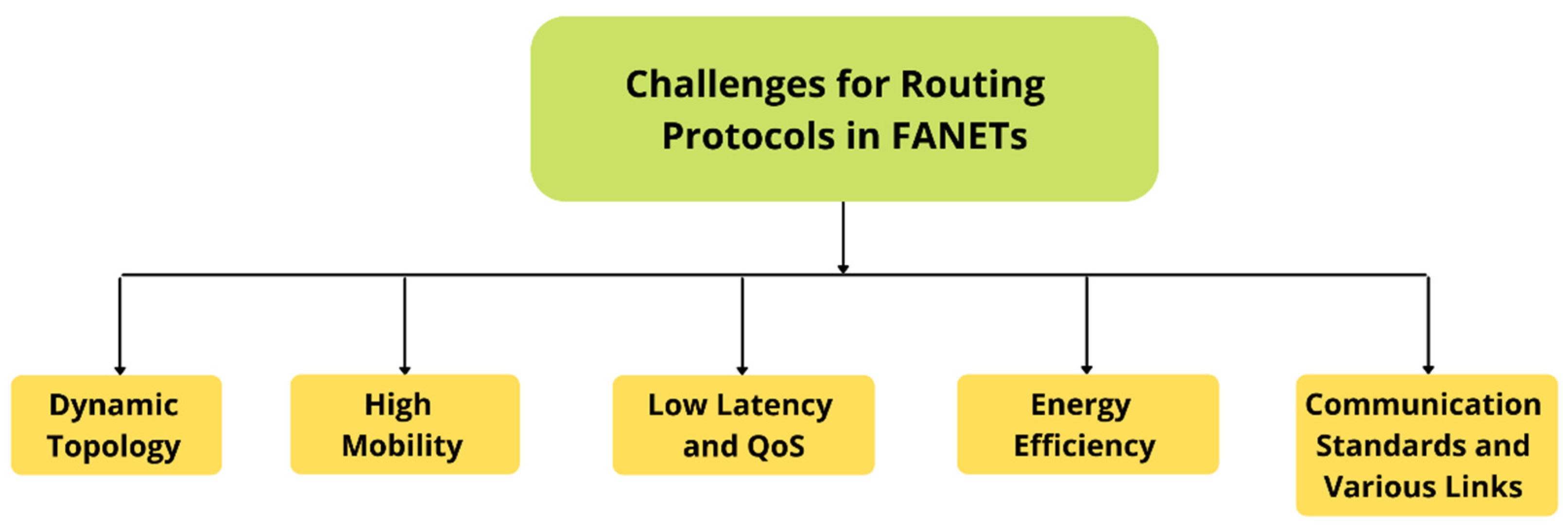
3. Challenges for Routing Protocols in FANETs
3.1. High Mobility
3.2. High Dynamic Topology
3.3. Low Latency and Enhanced QoS
3.4. Energy Efficiency
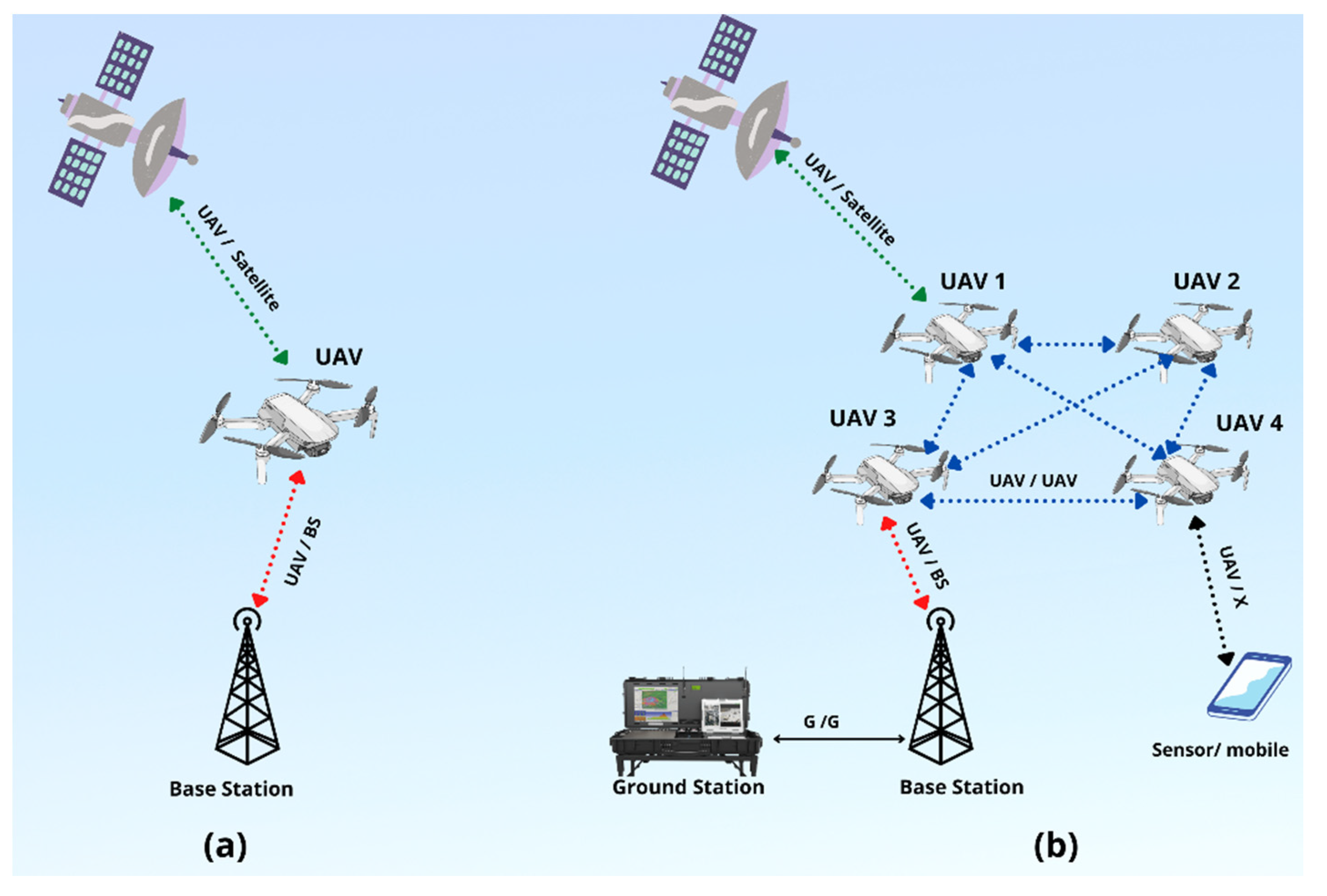
3.5. Communication Standards and Various Links
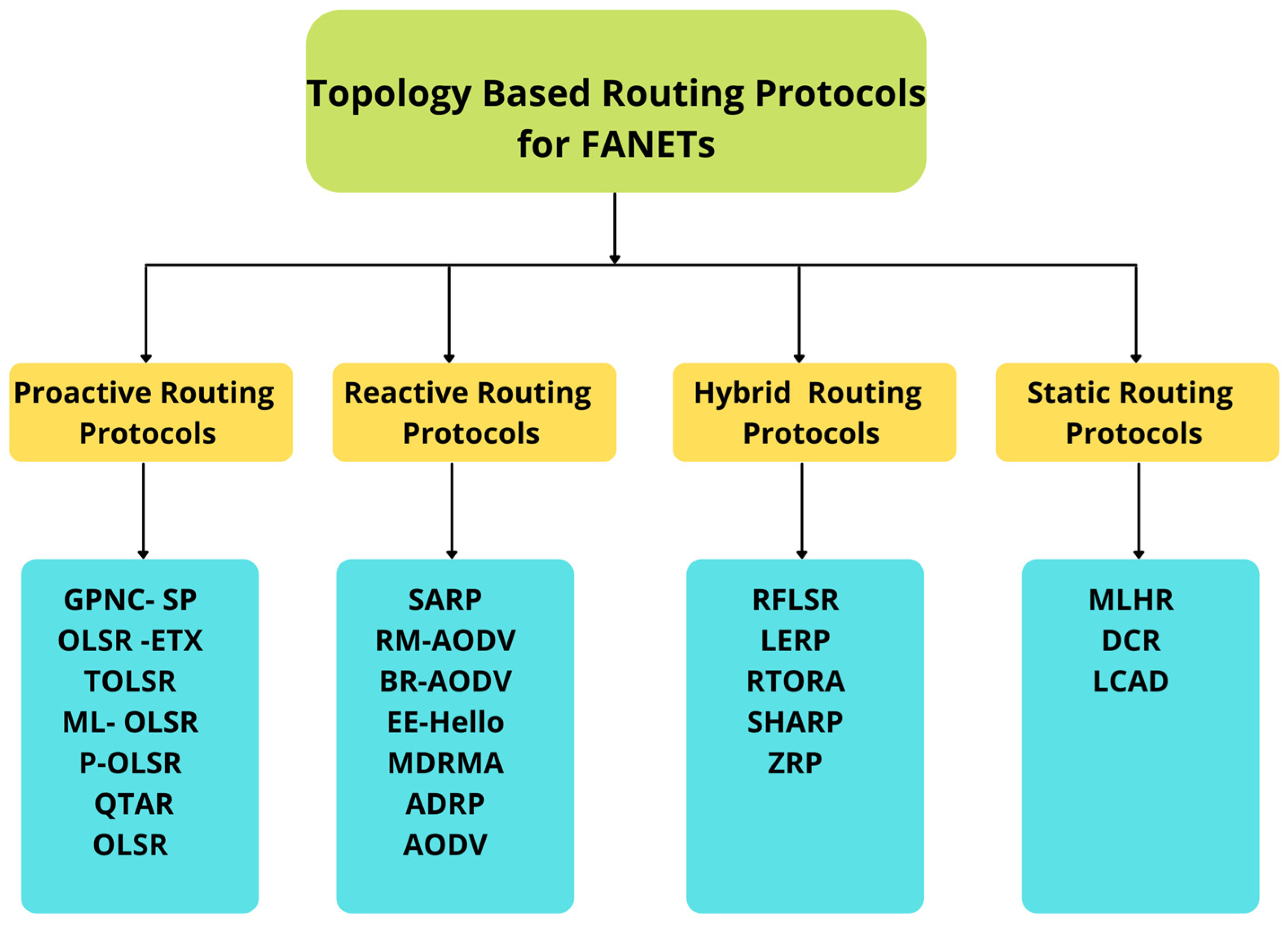
4. Topology-Based Routing Protocols in FANETs
4.1. Proactive Routing Protocol
4.2. Reactive Routing Protocol
4.3. Hybrid Routing Protocol
4.4. Static Routing Protocol
5. Comparison of Topology Based Routing Protocol
6. Open Issues and Future Research Directions
6.1. Network Dynamicity and Link Failures
6.2. Various Quality of Service (QoS) Requirements
6.3. Simulation Tools
6.4. Energy Consumption
6.5. Coordination and Collaboration between UAVs
6.6. 3D Scenarios
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Z.; Duan, L. Chase or Wait: Dynamic UAV Deployment to Learn and Catch Time-Varying User Activities. IEEE Trans. Mob. Comput. 2021, 1233, 1–15. [Google Scholar] [CrossRef]
- Stecz, W.; Gromada, K. UAV Mission Planning with SAR Application. Sensors 2020, 20, 1080. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khan, N.A.; Jhanjhi, N.Z.; Brohi, S.N.; Nayyar, A. Emerging use of UAV’s: Secure communication protocol issues and challenges. In Drones in Smart-Cities; Elsevier Inc.: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Chowdhury, S.; Emelogu, A.; Marufuzzaman, M.; Nurre, S.G.; Bian, L. Drones for disaster response and relief operations: A continuous approximation model. Int. J. Prod. Econ. 2017, 188, 167–184. [Google Scholar] [CrossRef]
- Lygouras, E.; Santavas, N.; Taitzoglou, A.; Tarchanidis, K.; Mitropoulos, A.; Gasteratos, A. Unsupervised Human Detection with an Embedded Vision System on a Fully Autonomous UAV for Search and Rescue Operations. Sensors 2019, 19, 3542. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, X.; Savkin, A. Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey. Futur. Internet 2021, 13, 174. [Google Scholar] [CrossRef]
- Jin, Y.; Qian, Z.; Yang, W. UAV Cluster-Based Video Surveillance System Optimization in Heterogeneous Communication of Smart Cities. IEEE Access 2020, 8, 55654–55664. [Google Scholar] [CrossRef]
- Castiglioni, C.A.; Rabuffetti, A.S.; Chiarelli, G.P.; Brambilla, G.; Georgi, J. Unmanned aerial vehicle (UAV) application to the structural health assessment of large civil engineering structures. Int. Soc. Opt. Photonics 2017, 188, 167–184. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Munawar, H.S.; Inam, H.; Ullah, F.; Qayyum, S.; Kouzani, A.Z.; Mahmud, M.A.P. Towards Smart Healthcare: UAV-Based Optimized Path Planning for Delivering COVID-19 Self-Testing Kits Using Cutting Edge Technologies. Sustainability 2021, 13, 10426. [Google Scholar] [CrossRef]
- Khosravi, M.; Pishro-Nik, H. Unmanned Aerial Vehicles for Package Delivery and Network Coverage. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, H.; Hou, S.; Zhao, Z.; Xu, H.; Wu, X.; Wu, Q.; Zhang, R. A Survey on 5G Millimeter Wave Communications for UAV-Assisted Wireless Networks. IEEE Access 2019, 7, 117460–117504. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, Y.; Sun, H.; Chu, Z. UAV-Enabled mobile edge computing: Offloading optimization and trajectory design. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Perz, R.; Wronowski, K. UAV application for precision agriculture. Aircr. Eng. Aerosp. Technol. 2019, 91, 257–263. [Google Scholar] [CrossRef]
- Senthilnath, J.; Kandukuri, M.; Dokania, A.; Ramesh, K.N. Application of UAV imaging platform for vegetation analysis based on spectral-spatial methods. Comput. Electron. Agric. 2017, 140, 8–24. [Google Scholar] [CrossRef]
- Tucci, G.; Parisi, E.I.; Castelli, G.; Errico, A.; Corongiu, M.; Sona, G.; Viviani, E.; Bresci, E.; Preti, F. Multi-sensor UAV application for thermal analysis on a dry-stone terraced vineyard in rural tuscany landscape. ISPRS Int. J. Geo-Inf. 2019, 8, 87. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, A.; Prakash, J. Future FANET with application and enabling techniques: Anatomization and sustainability issues. Comput. Sci. Rev. 2021, 39, 100359. [Google Scholar] [CrossRef]
- Zafar, W.; Khan, B.M. Flying Ad-Hoc Networks: Technological and Social Implications. IEEE Technol. Soc. Mag. 2016, 35, 67–74. [Google Scholar] [CrossRef]
- Tareque, M.H.; Hossain, M.S.; Atiquzzaman, M. On the routing in flying ad hoc networks. In Proceedings of the 2015 Federated Conference on Computer Science and Information Systems (FedCSIS), Lodz, Poland, 13–16 September 2015. [Google Scholar] [CrossRef] [Green Version]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Alsamhi, S.H.; Hawbani, A. Multi- UAV and SAR collaboration model for disaster management in B5G networks. Internet Technol. Lett. 2021, e310. [Google Scholar] [CrossRef]
- Pu, C. Jamming-Resilient Multipath Routing Protocol for Flying Ad Hoc Networks. IEEE Access 2018, 6, 68472–68486. [Google Scholar] [CrossRef]
- Munshi, A.A.; Sharma, S.; Kang, S.S. A Review on Routing Protocols for Flying Ad-Hoc Networks. In Proceedings of the 2018 International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 11–12 July 2018; pp. 1270–1274. [Google Scholar] [CrossRef]
- Fatemidokht, H.; Rafsanjani, M.K.; Gupta, B.B.; Hsu, C.-H. Efficient and Secure Routing Protocol Based on Artificial Intelligence Algorithms With UAV-Assisted for Vehicular Ad Hoc Networks in Intelligent Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4757–4769. [Google Scholar] [CrossRef]
- Tan, H.; Chung, I. RSU-Aided Remote V2V Message Dissemination Employing Secure Group Association for UAV-Assisted VANETs. Electronics 2021, 10, 548. [Google Scholar] [CrossRef]
- Khan, I.U.; Qureshi, I.M.; Aziz, M.A.; Cheema, T.A.; Shah, S.B.H. Smart IoT Control-Based Nature Inspired Energy Efficient Routing Protocol for Flying Ad Hoc Network (FANET). IEEE Access 2020, 8, 56371–56378. [Google Scholar] [CrossRef]
- Khan, M.A.; Khan, I.U.; Safi, A.; Quershi, I.M. Dynamic Routing in Flying Ad-Hoc Networks Using Topology-Based Routing Protocols. Drones 2018, 2, 27. [Google Scholar] [CrossRef] [Green Version]
- Sahingoz, O.K. Networking Models in Flying Ad-Hoc Networks (FANETs): Concepts and Challenges. J. Intell. Robot. Syst. Theory Appl. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Yagoubi, M.B. A survey on position-based routing protocols for Flying Ad hoc Networks (FANETs). Veh. Commun. 2017, 10, 29–56. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. A Survey on Cluster-Based Routing Protocols for Unmanned Aerial Vehicle Networks. IEEE Access 2019, 7, 498–516. [Google Scholar] [CrossRef]
- Mukherjee, A.; Keshary, V.; Pandya, K.; Dey, N.; Satapathy, S.C. Flying ad hoc networks: A comprehensive survey. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2018; Volume 701, pp. 569–580. [Google Scholar] [CrossRef]
- Malhotra, A.; Kaur, S. A comprehensive review on recent advancements in routing protocols for flying ad hoc networks. Trans. Emerg. Telecommun. Technol. 2019, 1–32. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Routing Protocols for Unmanned Aerial Vehicle Networks: A Survey. IEEE Access 2019, 7, 99694–99720. [Google Scholar] [CrossRef]
- Khan, M.F.; Yau, K.-L.A.; Noor, R.M.; Imran, M.A. Routing Schemes in FANETs: A Survey. Sensors 2020, 20, 38. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sang, Q.; Wu, H.; Xing, L.; Xie, P. Review and Comparison of Emerging Routing Protocols in Flying Ad Hoc Networks. Symmetry 2020, 12, 971. [Google Scholar] [CrossRef]
- Agrawal, J.; Kapoor, M. A comparative study on geographic-based routing algorithms for flying ad-hoc networks. Concurr. Comput. Pr. Exp. 2021, e6253. [Google Scholar] [CrossRef]
- Chiang, K.-H.; Shenoy, N. A 2-D Random-Walk Mobility Model for Location-Management Studies in Wireless Networks. IEEE Trans. Veh. Technol. 2004, 53, 413–424. [Google Scholar] [CrossRef] [Green Version]
- Cheng, X.; Dong, C.; Dai, H.; Chen, G. MOOC: A Mobility Control Based Clustering Scheme for Area Coverage in FANETSs. In Proceedings of the 2018 IEEE 19th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Chania, Greece, 12–15 June 2018; pp. 14–22. [Google Scholar] [CrossRef]
- Filho, J.A.; Rosário, D.; Rosário, D.; Santos, A.; Gerla, M. Satisfactory video dissemination on FANETs based on an enhanced UAV relay placement service. Ann. Telecommun. Telecommun. 2018, 73, 601–612. [Google Scholar] [CrossRef]
- Yoon, J.; Liu, M.; Noble, B. Random waypoint considered harmful. In Proceedings of the IEEE INFOCOM 2003, Twenty-second Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE Cat. No.03CH37428), San Francisco, CA, USA, 30 March–3 April 2003; Volume 2, pp. 1312–1321. [Google Scholar] [CrossRef] [Green Version]
- Leonov, A.; Litvinov, G.A. About Applying AODV and OLSR Routing Protocols to Relaying Network Scenario in FANET with Mini-UAVs. In Proceedings of the 2018 XIV International Scientific-Technical Conference on Actual Problems of Electronics Instrument Engineering (APEIE), Novosibirsk, Russia, 2–6 October 2018; pp. 220–228. [Google Scholar] [CrossRef]
- Liu, M.; Wan, Y.; Lewis, F.L. Analysis of the Random Direction Mobility Model with a Sense-and-Avoid Protocol. In Proceedings of the 2017 IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Bai, F.; Sadagopan, N.; Helmy, A. The IMPORTANT framework for analyzing the Impact of Mobility on Performance of RouTing protocols for Adhoc NeTworks. Ad Hoc Netw. 2003, 1, 383–403. [Google Scholar] [CrossRef]
- Kalyanam, K.; Casbeer, D.; Pachter, M. Graph search of a moving ground target by a UAV aided by ground sensors with local information. Auton. Robot. 2020, 44, 831–843. [Google Scholar] [CrossRef]
- Khosravi, Z.; Gerasimenko, M.; Andreev, S.; Koucheryavy, Y. Performance Evaluation of UAV-Assisted mmWave Operation in Mobility-Enabled Urban Deployments. In Proceedings of the 2018 41st International Conference on Telecommunications and Signal Processing (TSP), Athens, Greece, 4–6 July 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Ding, W.; Xu, R.; Xu, B.; Xiao, C.; Zhao, L. A Performance Comparison of Routing Protocols for Tramcars in Mining Industry. In Proceedings of the 2019 International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Atlanta, GA, USA, 14–17 July 2019; pp. 1148–1153. [Google Scholar] [CrossRef]
- Li, X.; Zhang, T.; Li, J. A particle swarm mobility model for flying ad hoc networks. In Proceedings of the GLOBECOM 2017–2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Prabhakaran, P.; Sankar, R. Impact of Realistic Mobility Models on Wireless Networks Performance. In Proceedings of the 2006 IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Montreal, QC, Canada, 19–21 June 2006; pp. 329–334. [Google Scholar] [CrossRef]
- Bujari, A.; Palazzi, C.E.; Ronzani, D. FANET Application Scenarios and Mobility Models. In Proceedings of the 3rd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, New York, NY, USA, 23 June 2017; pp. 43–46. [Google Scholar] [CrossRef]
- Adya, A.; Sharma, K.P. Nonita A Comparative Analysis of Mobility Models for Network of UAVs. In Proceedings of the international Conference on Information, Communication and Computing Technology, New Delhi, India, 11 May 2019; pp. 128–143. [Google Scholar] [CrossRef]
- Kuiper, E.; Nadjm-Tehrani, S. Mobility Models for UAV Group Reconnaissance Applications. In Proceedings of the 2006 International Conference on Wireless and Mobile Communications (ICWMC’06), Bucharest, Romania, 29–31 July 2006; pp. 2–8. [Google Scholar] [CrossRef]
- Guillen-Perez, A.; Cano, M.-D. Flying Ad Hoc Networks: A New Domain for Network Communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef] [Green Version]
- Tabassum, H.; Salehi, M.; Hossain, E. Fundamentals of Mobility-Aware Performance Characterization of Cellular Networks: A Tutorial. IEEE Commun. Surv. Tutor. 2019, 21, 2288–2308. [Google Scholar] [CrossRef]
- Dalu, S.S.; Naskar, M.K.; Sarkar, C.K. Implementation of a Topology Control Algorithm for MANETs Using Nomadic Community Mobility Model. In Proceedings of the 2008 IEEE Region 10 and the Third international Conference on Industrial and Information Systems, Kharagpur, India, 8–10 December 2008; pp. 8–12. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Lorenz, P.; Tareque, H.; Hossain, S. Routing in Flying Ad Hoc Networks: Survey, Constraints, and Future Challenge Perspectives. IEEE Access 2019, 7, 81057–81105. [Google Scholar] [CrossRef]
- Singh, K.; Verma, A.K. Adaptability of Various Mobility Models for Flying AdHoc Networks—A Review. Netw. Commun. Data Knowl. Eng. 2017, 51–63. [Google Scholar] [CrossRef]
- Atsan, E.; Özkasap, Ö. A Classification and Performance Comparison of Mobility Models for Ad Hoc Networks. Lect. Notes Comput. Sci. Incl. Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinform. 2006, 4104, 444–457. [Google Scholar] [CrossRef] [Green Version]
- Tolety, V.; Camp, T. Load Reduction in Ad Hoc Networks Using Mobile Servers. Maeter’s Thesis, Colorado School of Mines, Golden, CO, USA, 1999; pp. 8–40. [Google Scholar]
- Li, Y.; Wang, W.; Gao, H.; Wu, Y.; Su, M.; Wang, J.; Liu, Y. Air-to-ground 3D channel modeling for UAV based on Gauss-Markov mobile model. AEU-Int. J. Electron. Commun. 2020, 114, 152995. [Google Scholar] [CrossRef]
- Korneev, D.A.; Leonov, A.; Litvinov, G.A. Estimation of Mini-UAVs Network Parameters for Search and Rescue Operation Scenario with Gauss-Markov Mobility Model. In Proceedings of the 2018 Systems of Signal Synchronization, Generating and Processing in Telecommunications (SYNCHROINFO), Minsk, Belarus, 4–5 July 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Dong, Y.; Wu, M. A smooth-trajectory mobility model for airborne networks. In Proceedings of the 2017 20th International Symposium on Wireless Personal Multimedia Communications (WPMC), Bali, Indonesia, 17–20 December 2017; pp. 398–403. [Google Scholar] [CrossRef]
- Jo, Y.-I.; Lee, S.; Kim, K.H. Overlap Avoidance of Mobility Models for Multi-UAVs Reconnaissance. Appl. Sci. 2020, 10, 4051. [Google Scholar] [CrossRef]
- Martinez-Caro, J.-M.; Cano, M.-D. IoT System Integrating Unmanned Aerial Vehicles and LoRa Technology: A Performance Evaluation Study. Wirel. Commun. Mob. Comput. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Biomo, J.-D.M.M.; Kunz, T.; St-Hilaire, M. An enhanced Gauss-Markov mobility model for simulations of unmanned aerial ad hoc networks. In Proceedings of the 2014 7th IFIP Wireless and Mobile Networking Conference (WMNC), Vilamoura, Portugal, 20–22 May 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Alvear, O.; Zema, N.R.; Natalizio, E.; Calafate, C.T. Using UAV-Based Systems to Monitor Air Pollution in Areas with Poor Accessibility. J. Adv. Transp. 2017, 2017, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Anjum, N.; Wang, H. Mobility Modeling and Stochastic Property Analysis of Airborne Network. IEEE Trans. Netw. Sci. Eng. 2020, 7, 1282–1294. [Google Scholar] [CrossRef]
- Tiwari, A.; Ganguli, A.; Sampath, A.; Anderson, D.S.; Shen, B.H.; Krishnamurthi, N.; Yadegar, J.; Gerla, M.; Krzysiak, D. Mobility aware routing for the airborne network backbone. In Proceedings of the MILCOM 2008–2008 IEEE Military Communications Conference, San Diego, CA, USA, 16–19 November 2008; pp. 1–7. [Google Scholar]
- Lancovs, D. Building, Verifying and Validating a Collision Avoidance Model for Unmanned Aerial Vehicles. Procedia Eng. 2017, 178, 155–161. [Google Scholar] [CrossRef]
- Georgiou, H.; Pelekis, N.; Sideridis, S.; Scarlatti, D.; Theodoridis, Y. Semantic-aware aircraft trajectory prediction using flight plans. Int. J. Data Sci. Anal. 2020, 9, 215–228. [Google Scholar] [CrossRef]
- Wang, W.; Guan, X.; Wang, B.; Wang, Y. A novel mobility model based on semi-random circular movement in mobile ad hoc networks. Inf. Sci. 2010, 180, 399–413. [Google Scholar] [CrossRef]
- Zheng, X.; Yan, X.; Wang, K.; Zhou, Q. Research on the mission oriented mobile model of aviation network. Int. Soc. Opt. Photonics 2021, 11763, 117635M. [Google Scholar] [CrossRef]
- Zhen, Z.; Zhu, P.; Xue, Y.; Ji, Y. Distributed intelligent self-organized mission planning of multi-UAV for dynamic targets cooperative search-attack. Chin. J. Aeronaut. 2019, 32, 2706–2716. [Google Scholar] [CrossRef]
- Bouachir, O.; Abrassart, A.; Garcia, F.; Larrieu, N. A mobility model for UAV ad hoc network. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 383–388. [Google Scholar] [CrossRef] [Green Version]
- Cumino, P.; Maciel, K.; Tavares, T.; Oliveira, H.; Rosário, D.; Cerqueira, E. Cluster-Based Control Plane Messages Management in Software-Defined Flying Ad-Hoc Network. Sensors 2020, 20, 67. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Cumino, P.; Souza, A.; Rosário, D.; Braun, T.; Cerqueira, E.; Gerla, M. Software-defined unmanned aerial vehicles networking for video dissemination services. Ad Hoc Netw. 2018, 83, 68–77. [Google Scholar] [CrossRef]
- Mariyappan, K.; Christo, M.S.; Khilar, R. Implementation of FANET energy efficient AODV routing protocols for flying ad hoc networks [FEEAODV]. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Al-Absi, M.A.; Al-Absi, A.A.; Sain, M.; Lee, H. Moving ad hoc networks—A comparative study. Sustainability 2021, 13, 6187. [Google Scholar] [CrossRef]
- Zafar, W.; Khan, B.M. A reliable, delay bounded and less complex communication protocol for multicluster FANETs. Digit. Commun. Netw. 2017, 3, 30–38. [Google Scholar] [CrossRef] [Green Version]
- Usman, Q.; Chughtai, O.; Nawaz, N.; Kaleem, Z.; Khaliq, K.A.; Nguyen, L.D. Lifetime Improvement Through Suitable Next Hop Nodes Using Forwarding Angle in FANET. In Proceedings of the 2020 4th International Conference on Recent Advances in Signal Processing, Telecommunications & Computing (SigTelCom), Hanoi, Vietnam, 28–29 August 2020; pp. 50–55. [Google Scholar] [CrossRef]
- Tazibt, C.Y.; Bekhti, M.; Djamah, T.; Achir, N.; Boussetta, K. Wireless sensor network clustering for UAV-based data gathering. In Proceedings of the 2017 Wireless Days, Porto, Portugal, 29–31 March 2017; pp. 245–247. [Google Scholar] [CrossRef]
- Khudayer, B.H.; Anbar, M.; Hanshi, S.M.; Wan, T.-C. Efficient Route Discovery and Link Failure Detection Mechanisms for Source Routing Protocol in Mobile Ad-Hoc Networks. IEEE Access 2020, 8, 24019–24032. [Google Scholar] [CrossRef]
- Sun, F.; Deng, Z.; Wang, C.; Li, Z. A Networking Scheme for FANET Basing on SPMA Protocol. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; pp. 182–187. [Google Scholar] [CrossRef]
- Sharma, V.; Kumar, R.; Kumar, N. DPTR: Distributed priority tree-based routing protocol for FANETs. Comput. Commun. 2018, 122, 129–151. [Google Scholar] [CrossRef]
- Wheeb, A.H.; Kanellopoulos, D.N. Simulated Performance of SCTP and TFRC over MANETs: The impact of traffic load and nodes mobility. Int. J. Bus. Data Commun. Netw. 2020, 16, 69–83. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Mozaffari, M.; Chaib, N.; Lorenz, P.; Atiquzzaman, M.; Jamalipour, A. ECaD: Energy-efficient routing in flying ad hoc networks. Int. J. Commun. Syst. 2019, 32. [Google Scholar] [CrossRef] [Green Version]
- Yang, Q.; Jang, S.-J.; Yoo, S.-J. Q-Learning-Based Fuzzy Logic for Multi-objective Routing Algorithm in Flying Ad Hoc Networks. Wirel. Pers. Commun. 2020, 113, 115–138. [Google Scholar] [CrossRef]
- Xu, C.; Xu, M.; Yin, C. Optimized multi-UAV cooperative path planning under the complex confrontation environment. Comput. Commun. 2020, 162, 196–203. [Google Scholar] [CrossRef]
- Nekrasov, M.; Ginier, M.; Allen, R.; Artamonova, I.; Belding, E. Impact of 802.15.4 Radio Antenna Orientation on UAS Aerial Data Collection. In Proceedings of the 29th International Conference on Computer Communications and Networks (ICCCN), Honolulu, HI, USA, 3–6 August 2020. [Google Scholar] [CrossRef]
- Abdalla, A.S.; Marojevic, V. Communications Standards for Unmanned Aircraft Systems: The 3GPP Perspective and Research Drivers. IEEE Commun. Stand. Mag. 2021, 5, 70–77. [Google Scholar] [CrossRef]
- Lin, Q.; Song, H.; Gui, X.; Wang, X.; Su, S. A shortest path routing algorithm for unmanned aerial systems based on grid position. J. Netw. Comput. Appl. 2018, 103, 215–224. [Google Scholar] [CrossRef]
- Xie, P. An Enhanced OLSR Routing Protocol based on Node Link Expiration Time and Residual Energy in Ocean FANETS. In Proceedings of the 2018 24th Asia-Pacific Conference on Communications (APCC), Ningbo, China, 12–14 November 2018; pp. 598–603. [Google Scholar] [CrossRef]
- Hou, C.; Xu, Z.; Jia, W.-K.; Cai, J.; Li, H. Improving aerial image transmission quality using trajectory-aided OLSR in flying ad hoc networks. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 1–21. [Google Scholar] [CrossRef]
- Zheng, Y.; Jiang, Y.; Dong, L.; Wang, Y.; Li, Z.; Zhang, H. A mobility and load aware OLSR routing protocol for UAV mobile ad-hoc networks. IET Conf. Publ. 2014, 2014. [Google Scholar] [CrossRef]
- Rosati, S.; Kruzelecki, K.; Traynard, L.; Rimoldi, B. Speed-aware routing for UAV ad-hoc networks. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1367–1373. [Google Scholar]
- Arafat, M.Y.; Moh, S. A Q-Learning-Based Topology-Aware Routing Protocol for Flying Ad Hoc Networks. IEEE Internet Things J. 2021, 1. [Google Scholar] [CrossRef]
- Clausen, T.; Jacquet, P.; Adjih, C.; Laouiti, A.; Minet, P.; Muhlethaler, P.; Qayyum, A.; Viennot, L. Optimized link state routing protocol (OLSR). RFC3626. Technol. Rep. 2003, 1, 1–75. [Google Scholar]
- Zheng, X.; Qi, Q.; Wang, Q.; Li, Y. A Stable Ant-based Routing Protocol for Flying Ad Hoc Networks. In Proceedings of the 4th International Conference on Machinery, Materials and Computer (MACMC 2017), Xi’an, China, 27–29 November 2017; pp. 410–416. [Google Scholar] [CrossRef] [Green Version]
- Katila, C.J.; Di Gianni, A.; Buratti, C.; Verdone, R. Routing protocols for video surveillance drones in IEEE 802.11s Wireless Mesh Networks. In Proceedings of the 2017 European Conference on Networks and Communications (EuCNC), Oulu, Finland, 12–15 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Bahloul, N.E.H.; Boudjit, S.; Abdennebi, M.; Boubiche, D.E. Bio-Inspired on Demand Routing Protocol for Unmanned Aerial Vehicles. In Proceedings of the 2017 26th International Conference on Computer Communication and Networks (ICCCN), Vancouver, BC, Canada, 31 July–3 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Mahmud, I.; Cho, Y.-Z. Adaptive Hello Interval in FANET Routing Protocols for Green UAVs. IEEE Access 2019, 7, 63004–63015. [Google Scholar] [CrossRef]
- Darabkh, K.A.; Alfawares, M.G.; Althunibat, S. MDRMA: Multi-data rate mobility-aware AODV-based protocol for flying ad-hoc networks. Veh. Commun. 2019, 18. [Google Scholar] [CrossRef]
- Zheng, X.; Qi, Q.; Wang, Q.; Li, Y. An adaptive density-based routing protocol for flying Ad Hoc networks. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2017; Volume 1890, p. 040113. [Google Scholar] [CrossRef] [Green Version]
- Wheeb, A.H.; Naser, M.T. Simulation based comparison of routing protocols in wireless multihop adhoc networks. Int. J. Electr. Comput. Eng. 2021, 11, 3186–3192. [Google Scholar] [CrossRef]
- Tropea, M.; Santamaria, A.F.; De Rango, F.; Potrino, G. Reactive Flooding versus Link State Routing for FANET in Precision Agriculture. In Proceedings of the 2019 16th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Li, X.; Yan, J. LEPR: Link Stability Estimation-based Preemptive Routing protocol for Flying Ad Hoc Networks. In Proceedings of the 2017 IEEE Symposium on Computers and Communications (ISCC), Heraklion, Greece, 3–6 July 2017; pp. 1079–1084. [Google Scholar] [CrossRef]
- Zhai, Z.; Du, J.; Ren, Y. The Application and Improvement of Temporally Ordered Routing Algorithm in Swarm Network with Unmanned Aerial Vehicle Nodes. In Proceedings of the ICWMC 2013: The Ninth International Conference on Wireless and Mobile Communications, Nice, France, 21–26 July 2013; pp. 7–12. [Google Scholar]
- Ramasubramanian, V.; Haas, Z.J.; Sirer, E.G. SHARP: A hybrid adaptive routing protocol for mobile ad hoc networks. In Proceedings of the 4th ACM international symposium on Mobile ad hoc networking & computing, Annapolis, MD, USA, 1–3 June 2003; pp. 303–314. [Google Scholar]
- Beijar, N. Zone Routing Protocol (ZRP). In Networking Laboratory; Helsinki University of Technology: Espoo, Finland, 2002; pp. 1–12. [Google Scholar]
- Danoy, G.; Brust, M.R.; Bouvry, P. Connectivity Stability in Autonomous Multi-level UAV Swarms for Wide Area Monitoring. In Proceedings of the 5th ACM Symposium on Development and Analysis of Intelligent Vehicular Networks and Applications, Cancun, Mexico, 2–6 November 2015; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Safi, A.; Qureshi, I.M.; Khan, I.U. Flying ad-hoc networks (FANETs): A review of communication architectures, and routing protocols. In Proceedings of the 2017 First International Conference on Latest trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 15–16 November 2017; pp. 1–9. [Google Scholar] [CrossRef]
- Cheng, C.-M.; Hsiao, P.-H.; Kung, H.T.; Vlah, D. Maximizing Throughput of UAV-Relaying Networks with the Load-Carry-and-Deliver Paradigm. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 4417–4424. [Google Scholar] [CrossRef] [Green Version]
- Hameed, S.; Alyahya, S.; Minhas, Q.-A.; Habib, S.; Nawaz, A.; Ahmed, S.; Ishtiaq, A.; Islam, M.; Khan, S. Link and Loss Aware GW-COOP Routing Protocol for FANETs. IEEE Access 2021, 9, 110544–110557. [Google Scholar] [CrossRef]
- Kanellopoulos, D.N.; Wheeb, A.H. Simulated Performance of TFRC, DCCP, SCTP, and UDP Protocols Over Wired Networks. Int. J. Interdiscip. Telecommun. Netw. 2020, 12, 88–103. [Google Scholar] [CrossRef]
- Ahmed, A. Performance Analysis of VoIP in Wireless Networks. Int. J. Comput. Netw. Wirel. Commun. 2017, 174, 9–13. [Google Scholar] [CrossRef]
- Pandey, A.; Shukla, P.K.; Agrawal, R. An adaptive Flying Ad-hoc Network (FANET) for disaster response operations to improve quality of service (QoS). Mod. Phys. Lett. B 2020, 34, 1–25. [Google Scholar] [CrossRef]
- Arsheen, S.; Wahid, A.; Ahmad, K.; Khalim, K. Flying Ad hoc Network Expedited by DTN Scenario: Reliable and Cost-effective MAC Protocols Perspective. In Proceedings of the 2020 IEEE 14th International Conference on Application of Information and Communication Technologies (AICT), Tashkent, Uzbekistan, 7–9 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Marconato, E.A.; Rodrigues, M.; Pires, R.D.M.; Pigatto, D.F.; Filho, L.C.Q.; Pinto, A.R.; Branco, K.R.L.J.C. AVENS—A Novel Flying Ad Hoc Network Simulator with Automatic Code Generation for Unmanned Aircraft System. Wirel. Netw. 2017. [Google Scholar] [CrossRef] [Green Version]
- Aadil, F.; Raza, A.; Khan, M.F.; Maqsood, M.; Mehmood, I.; Rho, S. Energy Aware Cluster-Based Routing in Flying Ad-Hoc Networks. Sensors 2018, 18, 1413. [Google Scholar] [CrossRef] [Green Version]
- Bharany, S.; Sharma, S.; Badotra, S.; Khalaf, O.I.; Alotaibi, Y.; Alghamdi, S.; Alassery, F. Energy-Efficient Clustering Scheme for Flying Ad-Hoc Networks Using an Optimized LEACH Protocol. Energies 2021, 14, 6016. [Google Scholar] [CrossRef]
- Liu, C.; Feng, W.; Chen, Y.; Wang, C.-X.; Ge, N. Cell-Free Satellite-UAV Networks for 6G Wide-Area Internet of Things. IEEE J. Sel. Areas Commun. 2021, 39, 1116–1131. [Google Scholar] [CrossRef]
- Deb, P.K.; Mukherjee, A.; Misra, S. XiA: Send-it-Anyway Q-Routing for 6G-Enabled UAV-LEO Communications. IEEE Trans. Netw. Sci. Eng. 2021, 1. [Google Scholar] [CrossRef]
- Lin, N.; Gao, F.; Zhao, L.; Al-Dubai, A.; Tan, Z. A 3D smooth random walk mobility model for FANETSs. In Proceedings of the 2019 IEEE 21st International Conference on High Performance Computing and Communications; IEEE 17th International Conference on Smart City; IEEE 5th International Conference on Data Science and Systems (HPCC/SmartCity/DSS), Zhangjiajie, China, 10–12 August 2019; pp. 460–467. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference/ Year of Publication | Routing Protocols | Comparison Analysis of Routing Protocols | Routing Challenges | Taxonomy of Mobility Models | Comparison Analysis of Mobility Models | Communication Links of FANET | Open Issues |
|---|---|---|---|---|---|---|---|
| Ref. [27]/2014 | √ | X | X | X | X | √ | √ |
| Ref. [28] 2017 | √ | √ | X | X | X | √ | √ |
| Ref. [29] 2019 | √ | √ | √ | X | X | √ | √ |
| Ref. [30]/2018 | √ | X | X | X | X | √ | √ |
| Ref. [31]/2019 | √ | √ | √ | X | X | X | √ |
| Ref. [32]/2019 | √ | √ | X | X | X | √ | √ |
| Ref. [33]]/2020 | √ | X | √ | X | X | √ | √ |
| Ref. [34]/2020 | √ | √ | X | X | X | √ | √ |
| Ref. [35]/2021 | √ | √ | X | X | X | X | √ |
| This review | √ | √ | √ | √ | √ | √ | √ |
| Mobility Model | Reference | Categories | Randomness | Smooth Curves | Connectivity | Collision Avoidance | Deployment Area |
|---|---|---|---|---|---|---|---|
| RW | Ref. [36] | Random | √ | × | × | × | 2D |
| RWP | Ref. [39] | Random | √ | × | × | × | 2D |
| RD | Ref. [41] | Random | √ | × | × | × | 2D |
| MG | Ref. [43] | Random | √ | × | × | × | 2D |
| CLMN | Ref. [47] | Group | × | × | √ | √ | 3D |
| ECR | Ref. [50] | Group | √ | × | √ | × | 3D |
| NC | Ref. [53] | Group | √ | × | √ | × | 3D |
| PRS | Ref. [55] | Group | × | × | √ | √ | 3D |
| BSA | Ref. [56] | Time-Dependent | × | √ | × | × | 3D |
| GM | Ref. [57] | Time-Dependent | × | √ | × | × | 3D |
| ST | Ref. [60] | Time-Dependent | √ | × | × | × | 3D |
| EGM | Ref. [63] | Time-Dependent | × | √ | × | × | 3D |
| FP | Ref. [66] | Path-Planned | × | √ | × | √ | 3D |
| SRCM | Ref. [69] | Path-Planned | √ | √ | × | √ | 2D |
| PPRZM | Ref. [72] | Path-Planned | × | √ | × | × | 2D |
| Protocol Type | Protocol Name | Reference | Main Feature |
|---|---|---|---|
| Proactive | OLSR | Ref. [95] | MPRs technique and use link quality extension |
| P-OLSR | Ref. [93] | Fast response to Network topology changes | |
| ML-OLSR | Ref. [92] | Reduce the time required for MPRs selection and path disconnections | |
| GPNC-SP | Ref. [89] | Reduce the overhead in the network | |
| OLSR-ETX | Ref. [90] | Support high-mobility networks | |
| TOLSR | Ref. [91] | Improve image quality during transmission in FANETs | |
| QTAR | Ref. [94] | Considers two-hop neighbor nodes while making routing decisions, broadening the local perspective of the network architecture. | |
| Reactive | AODV | Ref. [102] | Utilize network bandwidth efficiently |
| ADRP | Ref. [101] | Optimize messages of route discovery based on probability of adaptive forward | |
| RM-AODV | Ref. [97] | Suitable for video surveillance and can handle an increase in bandwidth | |
| BR-AODV | Ref. [98] | Suitable for surveillance mission and forest fire | |
| SARP | Ref. [96] | Reduce the rebroadcasting of control message of route request | |
| EE-Hello | Ref. [99] | Enhanced routing process by reducing the number of hello messages and reducing energy consumption for UAVs | |
| MDRMA | Ref. [100] | Provide a new routing mechanism by controlling the date rate with respect to the mobility of UAVs | |
| Hybrid | ZRP | Ref. [107] | Enhance the efficiency of route query and reply for reactive nature |
| SHARP | Ref. [106] | Reduce the number of zones to decrease the overhead | |
| RTORA | Ref. [105] | Support several routing techniques and loop-free | |
| LERP | Ref. [104] | Support breakages in low link | |
| RFLSR | Ref. [103] | Enhance energy efficiency based on link-state routing | |
| Static | LCAD | Ref. [110] | Enhance routing security and achieve maximum throughput |
| MLHR | Ref. [108] | Suitable for large FANETs | |
| DCR | Ref. [109] | Transmit data from one UAV to many UAVs in FANETs |
| Protocol Type | Protocol Name | Year | Route Type | Mobility Model | Simulation Tool | Performance Metrics * | Application Scenario |
|---|---|---|---|---|---|---|---|
| Proactive | OLSR | 2003 | Dynamic | RWP | NS-2 | RO | FANETs |
| P-OLSR | 2013 | Dynamic | PPRZM | Test bed | DL | Relay, Open area coverage | |
| ML-OLSR | 2014 | Dynamic | RWP | QualNet | PD, ED | FANETs | |
| GPNC-SP | 2018 | Dynamic | GM | MATLAB | RO, LS | FANETs | |
| OLSR-ETX | 2018 | Dynamic | RWP | NS-3 | ED, PD, RO | Ocean FANETs | |
| TOLSR | 2020 | Dynamic | PPRZM | MATLAB | ED, PD | Search and rescue | |
| QTAR | 2021 | Dynamic | GM | MATLAB | PD, ED, RO, EC | Monitoring applications. | |
| Reactive | AODV | 2003 | On demand | RWP | NS-2 | PD, ED | FANETs |
| ADRP | 2017 | On demand | RWP | NS-2 | PD, ED, NR, TH | FANETs | |
| RM-AODV | 2017 | On demand | MG | NS-3 | ED, PD, RO, PS | Video Surveillance | |
| BR-AODV | 2017 | On demand | N/A | NS-2 | GO, DR, ED | Surveillance | |
| SARP | 2018 | On demand | RWP | NS-2 | PD, TH, NR, | FANETs | |
| EE-Hello | 2019 | On demand | GM | NS-3 | PD, TH, RO, EC | Green UAVs | |
| MDRMA | 2019 | On demand | RWP | NS-3 | ED, RO, PD, | FANETs | |
| Hybrid | ZRP | 2002 | Hybrid | RWP | GloMoSim | ED | FANETs |
| SHARP | 2003 | Hybrid | RWP | GloMoSim | PO, LR, DJ | FANETs | |
| RTORA | 2013 | Hybrid | RWP | OPNET | RO, ED | Swarm Network | |
| LERP | 2017 | Hybrid | RWP | NS-3 | PD | FANETs | |
| RFLSR | 2019 | Hybrid | PPRZM | Others | EC, NK, TB | Agriculture | |
| Static | MLHR | 2000 | Static | RWP | GloMoSim | RO | FANETs |
| DCR | 2005 | Static | RWP | Others | ED | FANETs | |
| LCAD | 2007 | Static | FP | Test bed | PD, TH | FANETs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wheeb, A.H.; Nordin, R.; Samah, A.A.; Alsharif, M.H.; Khan, M.A. Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions. Drones 2022, 6, 9. https://doi.org/10.3390/drones6010009
Wheeb AH, Nordin R, Samah AA, Alsharif MH, Khan MA. Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions. Drones. 2022; 6(1):9. https://doi.org/10.3390/drones6010009
Chicago/Turabian StyleWheeb, Ali H., Rosdiadee Nordin, Asma’ Abu Samah, Mohammed H. Alsharif, and Muhammad Asghar Khan. 2022. "Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions" Drones 6, no. 1: 9. https://doi.org/10.3390/drones6010009