Survey on Routing Protocols for Vehicular Ad Hoc Networks Based on Multimetrics
by
 , , and
, , and
Carolina Tripp-Barba
1,* ,
,
Aníbal Zaldívar-Colado
1 ,
,
Luis Urquiza-Aguiar
2 and
and
José Alfonso Aguilar-Calderón
1
1
Facultad de Informática Mazatlán, Universidad Autónoma de Sinaloa, Mazatlán 82107, Mexico
2
Departamento de Electrónica, Telecomunicaciones y Redes de Información, Escuela Politécnica Nacional, Quito 170109, Ecuador
*
Author to whom correspondence should be addressed.
Electronics 2019, 8(10), 1177; https://doi.org/10.3390/electronics8101177
Submission received: 3 August 2019
/
Revised: 4 October 2019
/
Accepted: 9 October 2019
/
Published: 17 October 2019
(This article belongs to the Special Issue Recent Developments on Mobile Ad-Hoc Networks and Vehicular Ad-Hoc Networks)
Abstract
:In the last few years, many routing protocols have been proposed for vehicular ad hoc networks (VANETs) because of their specific characteristics. Protocols that use several metrics have been shown to be the most adequate to VANETs due to their effectiveness in dealing with dynamic environment changes due to vehicle mobility. Metrics such as distance, density, link stability, speed, and position were selected by the authors for the best proposal. Several surveys of routing proposals have been generated to categorize contributions and their application scenarios, but none of them focused on multimetric approaches. In this paper, we present a review of the routing protocols based on more than one metric to select the best route in a VANET. The main objective of this research was to present the contemporary most frequently used metrics in the different proposals and their application scenarios. This review helps in the selection protocols or the creation of metrics when a new protocol is designed.This survey of multimetric VANET routing protocols employed systematic literature-review (SLR) methodology in four well-knownown databases that allowed to analyze current state-of-the-art proposals. In addition, this paper provides a description of these multimetric routing protocols. Our findings indicate that distance and speed are the most popular and versatile metrics. Finally, we define some possible directions for future research related to the use of this class of protocols.
1. Introduction
The constant mobility of people, the increasing number of vehicles on roads, and the need for infrastructure-less communication technology for intelligent transportation systems (ITS) make vehicular ad hoc networks (VANETs) an important research topic in vehicular and wireless technologies.
Over the past few years, improvements in ITS have been focused on mitigating traffic congestion to reduce toxic emissions and fuel consumption, the enhancement of traffic safety, and offering mobile infotainment to passengers by improving on-road communication and making vehicles aware of their surroundings [1]. To achieve the main communication requirements of both safety and non-safety applications in a VANET scenario, there is a need to enhance vehicular communication and smart communications.
A VANET is a subclass of a mobile ad hoc network (MANET), in which vehicles communicate with each other and with nearby fixed roadside equipment. VANET communications include several models, such as vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I). Figure 1 shows a typical VANET scenario where V2I communications can be used to access location services or obtain traffic statistics. V2V could be employed to alert about emergencies or reach out of coverage nodes through multihop communication.
Due to rapid growth in vehicular communications, there are many studies covering all of its aspects, including channel modeling [2], appropriate scalable design of medium-access-layer (MAC) procedures [3], security and privacy policies [4], reliability and latency improvements [5], integration of VANET-LTE [6], and mainly routing protocols aiming to offer good performance and adaptability to changes in network topology.
Routing protocols are extremely important in ad hoc networks because they are responsible for initiating and maintaining routes to facilitate multi-hop communication and extend the service area of the network. Moreover, VANET routing protocols are designed for different scenarios considering the main characteristics and constraints in vehicular networks, such as mobility of nodes, interference, and bandwidth limitations. As we said, VANET has dynamic topology and, at run time, the network may support any kind of application. So, continuous research is in progress to improve routing decisions while considering the restrictions and challenging issues of VANETs [7].
VANET routing protocols can be classified according to their power-aware and predictive mobility capabilities. This classification looks to distinguish protocols with the efficient utilization of limited resources and quality-of-service (QoS) improvement. In this context, cluster-based routing protocols provide centralized control and they can be very useful to avoid saturation in very crowded networks [8]. Other protocols designed for low-latency applications based on topology or position information are presented in [9]. Finally, for reliable QoS routing, there are different approaches to obtain an optimal protocol according to different parameters [10] such as end-to-end delay [11], security, low collision, and interference [12].
Despite the different application-oriented classifications, standard criteria have been used more often to survey and classify them. Depending on if vehicles use infrastructure (e.g., RSUs) or not to forward packets to the final destination, VANET routing protocols can be categorized as V2I and V2V [8,13]. The former can be seen as a special case of V2V routing protocols, so almost no survey distinguishes between them. A typical classification of routing protocols is presented in [14] and it is based on transmission strategies in which a protocol can be unicast, multicast, broadcast, or geocast. This well-accepted classification of routing protocols was used in the survey of [7,8]. Moreover, unicast protocols were further split based on routing information in topology or position-based in [15,16], and cluster-based in [13].
According to a recent survey [17], unicast routing protocols are organized in the categories of topology, geographic, hybrid, clustering, opportunistic, and data fusion. Altayeb et al. [9] presented a routing-protocol survey with both, based on transmission strategies and routing-information classification. It is clear that the second assortment is a subclassification of unicast protocols.
Geographical routing protocols for VANETs are an important subset of unicast protocols into protocol classification based on routing information because they make their forwarding decision by using local information; therefore, this kind of protocol can react fast to frequent topology changes. As a consequence, many surveys specifically target geographical (also known as position-based) protocols in the literature. In [18], the authors explained the importance of a geographic protocol in VANETs and provided an updated survey. More specific reviews of geographical-routing proposals have been published over the years. In [19] only greedy approaches for geographical routing were presented, while [20] reviewed geographical routing for Vehicular Delay-Tolerant Networks (VDTNs) and group proposals according to the geographical knowledge needed for their operation. The traffic-aware classification of geographical-routing protocols proposed in [21] identified protocols that use surrounding information to improve communication performance.
Surveys of VANET routing protocols along years show that the forwarding criteria, especially in geographical protocols, have evolved from using only one metric to more novel proposals that employ several metrics, like vehicle speed and direction. In this paper, we concentrated on unicast routing protocols designed for VANETs using different metrics in hop-by-hop selection to improve vehicular communications. We present the principal metrics, their importance in vehicular scenarios, and which of them are selected by the proposals explained below.
The rest of this paper is organized as follows: Section 2 presents the main characteristics of VANETs that are relevant in the context of the paper. After that, Section 3 presents the systematic literature-review process used in this survey. Section 4 presents the most common metrics used by researchers in their routing protocols and their multimetric proposals. Next, Section 5 discusses our findings, and Section 6 presents conclusions.
2. VANET Characteristics
In VANETs, vehicles equipped with data wireless devices act as mobile hosts and routers for other nodes. Even though VANETs share characteristics with classical mobile ad hoc networks, such as a short transmission range, self-organization and self-management, and low bandwidth, vehicular ad hoc networks have special characteristics that distinguish them from other types of mobile ad hoc networks as follows [7,22]:
- Ability to provide continuous power: the node (vehicle) itself can, via a long-life battery, provide continuous power for computing and communication devices compared to the capabilities of typical MANET nodes.
- High computational capability: operating vehicles can use significantly higher computing, communication, and sensing capabilities compared to other mobile nodes (such as smartphones).
- Predictable mobility: vehicles have more predictable movements than typical MANET nodes. Vehicles only move over roads. Roadway information is available from positioning systems and map-based technologies. The future position of a vehicle could be estimated as a function of speed and road trajectory. The hour of the day or the specific day of the week is also a determinant parameter to predict vehicle mobility.
- Large scale: vehicular networks could cover an entire road network including many participants. Its coverage area can range from a neighborhood to an entire city. In highways, a VANET can easily reach tens of kilometers.
- High mobility: the topology created by vehicles in a VANET is extremely dynamic and includes different configurations. For instance, topology information of a vehicle that leaves an avenue to go to a residential area can dramatically change. In this regard, the density of nodes plays a very important role. If the density of vehicles is very high, as in, during rush hour, topology changes can be minimal. On the other hand, very low vehicle density, such as during week nights, leads to more changes in topology due to high mobility.
- Partitioned network: vehicular networks are frequently partitioned because of the nature of traffic. In residential and rural areas, there are intervehicle gaps because these are sparsely populated scenarios. This forms several isolated clusters of nodes.
- Various communication environments: very related to the mobility and partition ratio of VANETs are the communications environments in which they are typically operated. These scenarios can be, most of the time, highways or urban areas; the former are relatively simple and straightforward, while cities include more signal perturbations because of different types of obstacles, such as buildings, houses, and trees.
- Interaction with on-board sensors: Currently, vehicles are equipped with a good number of on-board sensors that provide information on the vehicle that can be used to make routing decisions (speed, direction) or to monitor surroundings (temperature, wind, humidity, etc.).
All these characteristics should be taken into account when designing a routing protocol or application dedicated to a vehicular network.
3. Systematic Literature Review
We developed a systematic literature-review (SLR) as suggested in [23] to guarantee replicability [24] of this survey in the future. We intend to summarize the information concerning how routing protocols based on multimetrics for VANETs make the best routing decisions. An SLR is a means of identifying, evaluating, and interpreting the available research pertinent to a particular research question, area, subject, or phenomenon of interest; it is composed of six phases: research questions, search process, inclusion and exclusion criteria, quality assessment, data collection, and data analysis.
3.1. Research Questions
According to [23], research questions we had to consider were population, intervention, comparison, and outcomes.
In our case, this survey is useful for VANET researchers who need a robust routing protocol to obtain better results in the development of new emergency- and data-interchange-focused services. More specifically, we targeted the improvement of hop-to-hop decisions in vehicular communications of multimetric routing protocols compared to prior proposals (that usually use one metric for routing decisions). The outcome of our review was to validate how the use of several metrics in a routing protocol improves the decision-making process in vehicular communication.
Based on the mentioned strategy, our Research Questions (RQ) are the following. With them, we aimed to know how important metric selection is in routing protocols for VANETs, and how multimetric use improves path selection.
- Which are the most used metrics in routing protocols for VANETs?
- Which combination of metrics is the most used for improved routing decisions?
- Which are the routing protocols with the most comparatives?
- Which network simulator is most used currently?
3.2. Search Strategy
It is necessary to determine and follow a search strategy to answer our research questions. The research sources we used were the following repositories with restricted access: IEEE, ACM, Scopus, and Science Direct. The construction of the research questions was used as a base to extract some keywords that were then used to search for primary studies. First, we had the following keywords: VANET, routing, multimetric, metrics, and protocol. Nevertheless, to obtain more specific and concrete results, we decided to link the words and use a search string to increase the number of potential pertinent studies: routing protocol VANET, metrics routing protocol VANET, and multimetric routing protocol VANET. The search covered the time period from 2005 to early 2019, but we then decided to reduce the period to 2009 to obtain better and newer results; these results are presented in Table 1. To improve the search, Boolean expressions were used, the results of which are presented in Table 2.
3.3. Inclusion and Exclusion Criteria
Inclusion and exclusion criteria were based on the research questions. These should be taken into account to guarantee that results can be reliably interpreted and to correctly categorize studies.
We selected the following inclusion criteria to find the relevant publications that answered our research questions:
- (i)
- Publication date 1 January 2009–1 January 2019;
- (ii)
- new routing protocol proposal for VANET is presented; and
- (iii)
- the routing decision was based on more than one metric.
For the exclusion criteria, we used:
- (i)
- Only already known compared protocols and
- (ii)
- duplicated documents from the same study.
3.4. Study Quality Assessment
The first search, without any exclusion-criteria, shown in Table 1 and Table 2, returned a high number of documents, several of which were duplicated. After the use of the exclusion/inclusion criteria, many documents were dismissed. All separate authors of this work individually checked the activity of searching for publications to ensure the quality of the place of publication. Quality evaluation was then separately performed to verify the obtained information. After the selection of around 100 documents, only 21 papers fulfilled the requirements of this study (e.g., publication period, new protocol proposal, more than one metrics used in the selection of forwarder nodes) and were selected in this review.
We note that the proposals were presented between 2009 and 2019 and that, between 2013 and 2018, a higher number of proposals were published (see Figure 2a. This figure also shows the simulators used by these proposals.).
We can also observe in Figure 2b that proposals were often evaluated using NS-2, specifically, of the analyzed proposals. NS-2 is a highly accepted network simulator in the research community. In comparison with other well-known network simulation tools, NS-2 has several advantages: (1) the code is open-source, research-community-accepted, and facilitates openness to modify the existing mechanism; (2) extensibility and stability; and (3) it can support large simulation scenarios where the number of nodes can be up to 20,000, making the simulation results more realistic [25]. NS-2 was one of the first simulators with these features. It is important to note that the two other simulators also share these characteristics, although they appeared after NS-2.
A summary of the whole SLR process is presented in Figure 3, from the identification of the articles in the four databases until the final selection going through the different selection filters.
The protocols selected as relevant for this study are presented and analyzed in the following sections.
4. Routing-Protocol Proposals Based on Metrics
In this section, we summarize the selected protocols in this SLR. First, we present the metrics most commonly used in these proposals and explain their utility.
4.1. Metric-Based Routing
This section presents some designing factors and strategies adopted in routing protocols that consider more than one metric into the selection of the best route. This summary aims to help new researchers in the area to analyze existing routing protocols for VANETs.
Currently, there are several metrics to improve routing protocols for vehicular communications. We first explain the metrics that have global importance. This means that the values of this kind of metric provide an idea of closeness or path quality to destination.
- Minimum hop count: counting the number of hops between a source and a destination to a particular path [26].
- Route cost metric (RCM): this metric was proposed in [27]. It is based on packet-delivery ratios, and also includes information on the level of link stability. Is possible to define the RCM of a link from a source to the destination vehicle by the Bellman equation.
- Packet reception rate (PRR): gives information about the efficiency of the dissemination scheme and the reliability of the data forwarding [9]. PRR is a metric highly related to the number of data losses in the network.
So-called local metrics provide information about the candidates to next forwarding nodes. They are usually employed to increase the probability of finding the next suitable hop or to recover from path-creation problems (e.g., broken links).
- Density: In order to find a reliable routing path, traffic density is a c very frequently used metric. Considering the high density in hop-by-hop selection, disconnection could be avoided. Using beacon messages, each node can analyze its own neighboring density based on the number of neighbors and include it to select a more stable route [1]. This is also called the degree of a vehicle, the number of vehicles within the transmission range [28] (see Figure 4).
- Speed: the speed of each node helps to calculate other metrics, such as movement direction, link quality, or link lifetime. It helps to predict link breakage [18].
- Link/route lifetime: it is defined as the shortest period during which two nodes can interchange data packets in a link or route [1,22] (see Figure 5).A stable routing path is provided by a longer link lifetime, which results in a reduction of packet losses. Consider (, ) and (, ) as coordinates of source nodes s and neighbor i, with their corresponding speed given by and , where < . Let R be the receive range. So, the link lifetime between s and i is calculated using Equation (1).
- Movement direction: the movement of vehicles is an important consideration in routing selection. If the source does not take into account the moving direction of the next possible hop, it could make the wrong forwarding decision by sending packets t vehicles that are moving against the direction of the destination [1] (see Figure 6). This is especially important if vehicles implement carry and forwarding. This means that, during the time that the vehicle carries the packet, it just moves packets away from the destination.
- Link quality: select the link with the fewest neighboring transmitting vehicles, buildings, and obstructions that affect link quality between vehicles [18].
4.2. Multimetric-Routing Proposals
Some routing-protocol proposals that use more than one of the previously explained metrics are presented below, applying to a specially developed systematic literature review.
Before we begin with routing-protocol proposals based on several metrics, it is important to mention three main routing protocols for ad hoc networks in general, ad hoc on-demand distance vector (AODV) [26], greedy perimeter stateless routing (GPSR) [28], and GeoNetworking protocol [29].
On the one hand, AODV and GPSR are the base in ad hoc network routing in MANET and VANET, which is our study field. They are the most commonly compared protocols with new proposals. On the other hand, GeoNetworking is the standardization effort from ETSI for VANET routing. In this sense, GeoNetworking must be used as a baseline for future proposals.
4.2.1. AODV
AODV is a routing protocol designed for mobile ad hoc networks. It is a reactive protocol, and routes are created only when a node wants to send a packet. It uses traditional routing tables, one entry per destination, and sequence numbers to determine up-to-date routing information. AODV store the routes (source–destination) while the source requires us to send information while the connectivity between nodes is active.
The principal stage of this protocol is route discovery, which works by the source node broadcasting route request messages (RREQ) to the other nodes to find the destination node. Route reply messages (RREP) are sent back to the RREQ source in unicast communication. The full path is formed storing information in intermediate nodes along the route in local routing tables. It also uses error messages (RERR) to notify when a communication break occurs. In this case, a new route-discovery process should begin.“Hello” messages are permanently used for detecting and monitoring connectivity with neighbors [26].
4.2.2. GPSR
GPSR [28] is an efficient routing protocol for wireless and mobile networks that exploits the geographical routing idea.
GPSR is based on two methods to forward data: greedy forwarding and perimeter forwarding. The first algorithm sends packets to the neighbor node closest to the destination, and this is used by default (see Figure 7a); the second method is selected in cases when greedy forwarding cannot be used (there is no closer node than the current one; see Figure 7b). In perimeter mode, GPSR exploits the idea of the right-hand rule to forward packets around voids where no closest neighbor is found.
4.2.3. GeoNetworking Protocol
The GeoNetworking (GN) protocol [29] is the routing-protocol standard from the European Telecommunications Standards Institute (ETSI); therefore, it is an important geographic-routing standard. GN is a network-layer protocol that provides packet routing in ad hoc networks. It is a VANET geographic-routing protocol where packets are routed by the VANET based on the geographical position of the nodes and the position of the packet destination, assuming the use of GPS to know their location. Packets are forwarded by different intermediate nodes from origin to destination, establishing multihop communication. In the GN protocol, there are two types of main packet delivery: geo-unicast and geobroadcast. The nodes use a location table (LT) that maintains the position of its neighbors and is used to make forwarding decisions; it also has packet buffers for location-service, store-carry-and-forward, and forwarding algorithms [32]. Several evaluations have been presented in [32], where the authors evaluated the performance of six variants of GeoBroadcast forwarding algorithms in ETSI GeoNetworking; in [33], the authors analyzed the performance of the GN protocol by simulation when provided Internet access from VANETs; in [34], the authors compared the behavior of ITS-G5/802.11p-based protocols for ad hoc networks and the available cellular infrastructure, called Cellular-based Vehicular Communication Systems (Cellular-VCS).
Now, we present the routing protocols designed for VANETs that use more than one routing metric.
4.2.4. Analytical Hierarchical Process (AHP)-Based Multimetric Geographical-Routing Protocol (AMGRP)
AMGRP [35] is an efficient routing protocol that considers multiple metrics, such as link lifetime, mobility, density, and node status under an AHP to obtain good protocol performance.
The forwarding decision in this proposal is very dependent on the use of mobility metrics such as distance, speed, and moving direction. This protocol assumes that each node knows its position and the position of the destination. This is important to prevent making wrong forwarding decisions by sending packets to vehicles that are moving against the destination direction. Suppose source vehicle s is at (, ), the destination node is at (, ), and neighbor vehicle i is at (, ); then, the moving angle between source and neighbor i toward destination d can be obtained as shown in Equation (2):
The second metric (link lifetime) is calculated as in Equation (3), where R is the radio range, (, ) and (, ) are the source and neighbor location, respectively, and v are the velocities.
If the queue length is small, the node could be congested because more data packets need to be processed. Before selecting the next hop, node status is obtained by calculating the buffer capacity ((t)) and can be calculated as follows:
where gives the maximum buffer size. is defined as the number of packets in the buffer queue at time t [35]. Density is also computed to minimize the local maximum; using the hello packet, each node calculates node density to select paths with a high number of vehicles and avoid intermittent connectivity.
Between each metric, there is a relative ranking, with the mobility metric as the most important criterion, node density as the second most important, node status as the third, and finally link lifetime as the least important criterion, as we can see in the values of Table 3. It is important to observe that the mobility metric has higher priority and an important role in the decision of the next-hop selection, in contrast with link lifetime that is least important among the four metrics included in decision criteria. Finally, a total score is assigned to each neighbor from the neighbor list considering the relative weights for the deciding factors to establish an optimal multihop routing path selecting an efficient forwarding node; a difference between path selection in AMGRP and GPRS is shown in Figure 8.
4.2.5. AODV with Predicting Node Trend (AODV-PNT)
AODV-PNT is a novel routing protocol proposed in [36], suitable for vehicular networks, which considers VANET topology features. It is an enhanced version of AODV. This proposal includes two main changes: the routing metric improvements and the estimation of the total weight of the route (TWR). This TWR includes analysis of movement direction, acceleration, vehicle speed, and link quality. Due to frequent topology changes, future TWR was included where it was attempted to calculate a relatively stable relay vehicle over a lapse of time in the future.
The authors calculated the TWR from a source node to the next hop, as shown in Equation (5).
where,
- , , : Direction, next-hop node’s speed and acceleration.
- , , : Direction, destination node’s speed and acceleration.
- : Speed weight factor.
- : Acceleration weight factor.
- : Direction weight factor.
- : Link-quality weight factor.
- Q: Link quality between source and next-hop vehicle.
Note that the TWR is defined by differences of link quality, speed, direction, and acceleration. The next-hop node is best with the least TWR and similar acceleration, speed, and direction compared to the destination vehicle and sound link quality between source node and next-hop node, as shown in [36].
4.2.6. AODV with Multi-RREP (AODV-MR)
A new scalable routing scheme, AODV-MR, was proposed in [27]. This proposal focused on link reliability and stability using an anycast approach. To find an optimal and suboptimal path, it uses a combination of route cost metric (RCM) and minimum hop count, and includes the carry and forwarding mechanisms to deal with broken routes.
RCM calculation of a source–destination link is defined by the Bellman Equation (6):
where is a cost of a hyperlink (s, j); s is the vehicle source, and j is a set of hyperlinks. The remaining any-path cost from j to destination node is .
4.2.7. Named Data VANET Protocol (NVP)
NVP was presented in [37], a novel routing protocol for VANET based on the named data network (NDN). The authors enhanced the routing path by using a new distance metric in the protocol, preventing the shortcomings of the hop-count-based metric. It also uses an incremental and adaptive broadcast strategy according to vehicle density.
The authors propose a novel transmission-cost-estimation method as follows (Equation (7)):
Seemingly, the higher the value of the transmission cost is, the worse the link quality is. Due to that, this metric can more accurately calculate link quality between communication nodes compared to the minimum hop-count metric [37]. Taking into account the scenario in Figure 9, we can notice vehicles between the source (s) and destination (D); A, B, and C are the forwarding nodes. However, even when A has the lowest number of hops, that route is not considered due to the block of the building causing packet losses. So path B–C–D was established because it offers better link quality.
Another improvement is the dynamic adjustment of backoff time according to vehicle density due to scenarios in a VANET. The authors separated the scenarios into three categories based on vehicle density: sparse (), normal (), and dense (). The new back-off time could be calculated with the following equation:
In Equation (8), factor represents a waiting factor; represents transmission cost between source and destination. Finally, the authors found the optimal waiting factors of 2.4, 3.6, and 5 in sparse, normal, and dense conditions, respectively.
To evaluate the proposal, virtual urban scenario V-city was designed to generate real-world traffic and set up a coordinative testbed integrating SUMO with NS-3. Simulation results indicated that the proposed protocol was more appropriate for VANET scenarios than AODV.
4.2.8. Multimetric Unicast Data-Dissemination Scheme (MUDDS)
Two important problems were identified in VANETs due to the frequent changes of topology, broadcasting storm (due to high density) and network disconnection (due to velocity). MUDDS was proposed in [38], a new protocol that uses link availability (LA), based on distance, which guarantees fewer hops; and packet reception rate (PRR), which guarantees reliability.
PRR is calculated as shown in Equation (9), where is the quantity of successfully received packets, is the total number of sent packets, and is the number of losses. These lost packets are many due to collisions that can take place in the network. When the network is close to its saturation, the number of collisions increases.
The LA was evaluated as shown in Equation (10), where is the space between actual node and selected forwarder, is the duration of link availability, T total time, and R the maximum achievable transmission range. This metric considers as an indicator of link state and link length (distance between sender and possible forwarder). This metric goal is to minimize network-disconnection problems.
4.2.9. Multimetric Opportunistic Routing (MMOR)
In [39], MMOR was presented, which included multimetrics in the selection of the best opportunistic next forward. To choose the forwarding candidate, it takes into account the distance to the destination, the load of the node, moving direction, velocity, and density. These parameters are key metrics in this proposal when the candidate for the next hop is selected.
After calculating each metric value, the opportunistic forward decision can be computed with these values, combined by Equation (11).
The decides each node’s priority. The node with the highest value among the candidates is selected as the best opportunistic forwarding node.
4.2.10. Multimedia Multimetric Map-Aware Routing Protocol (3MRP)
One of the most important applications in VANETs is the efficient management of accidents. When an accident occurs, a vehicle could transmit a short video about the situation through the VANET and alert the emergencies services or other vehicles in the area. In this context in [10], the proposal was an effective routing protocol to operate video-reporting messages in vehicular ad hoc networks; the proposal provides video-reporting messages over VANETs in smart cities, and is called the multimedia multimetric map-aware routing protocol (3MRP). The proposal included five metrics to improve the selection of the best routing path, distance, density, trajectory, available bandwidth estimation, and MAC losses.
When a sender vehicle receives hello messages (HM) from its neighbors in transmission range, the node updates its neighbors’ list with all those vehicles in line of sight (LOS), only considering the neighbors that sent their HM with enough power. Then, the source evaluates and assigns a total multimetric score to each neighbor as a possible candidate for the next forwarding node. As a first step, the authors considered the same weights (, , , , ) to each metric (, , , , ), respectively, in the multimetric score of each neighbor . Finally, a multimetric score was obtained for each candidate node using Equation (12). The final quantification varied between 0 and 5. The neighbor with the highest multimetric value is selected as the best next forwarding node.
As mentioned before, the authors first considered the same rank of importance to all the used metrics, i.e., = 1/5, 15; as the next improvement, the authors proposed to dynamically actualize the scores of the candidate neighbor vehicles using an algorithm to calculate the self-configured weights of the metrics.
4.2.11. Fuzzy-Control-Based AODV Routing (FCAR)
The basic idea of FCAR [40] is to use the percentage of same-directional vehicles and route lifetime as a routing metric to evaluate a path using the method of fuzzy logic and fuzzy control to make routing decisions under multiple selection criteria. The proposal ensures that the route has better stability and is not easily broken.
The basic idea is made up of a series of “” as conditional declarations. The precursor of the conditional statement is the input, and the consequent is the output. The rule base is very important for the fuzzy-control system; in [40], the authors obtained it through simulation by a mass of tests and adjustments.
Table 4 shows the corresponding six values of the two inputs, there are = 9 rules (R1...R9). From the fuzzy membership functions, only four out of the nine were in simultaneous operation.
4.2.12. Multimetric Next-Hop Vehicle Selection for Geocasting in Vehicular Ad-Hoc Networks
Multimetric next hop vehicle selection for geocasting in VANETs was presented in [41]. The authors proposed to choose an optimal next-hop vehicle (ONHV) based on various metrics divided into link-based and node-based metrics. The link-based metrics were link delay, link jitter, and link lifetime; the node-based metrics were velocity and degree. The metrics were individually evaluated, and objective function was then calculated for every (node) in the routing table. The was calculated as shown in Equation (13).
where , and are weighing factors for corresponding link metrics that act as tuneable parameters for application and =1, the node with highest as ONHV.
4.2.13. Reactive Routing Protocol for VANETs (RRPV)
RRPV [12] was proposed based on the idea of combined metrics as direct-connection reliability, hop count, and cochannel noise. With this selection, it tries to choose an appropriate path which minimizes interference.
When top-count , average best cochannel noise , and average reliability-probability , then the RRPV metric has to be adequately defined as a multiobjective function, as shown in Equation (14).
where p is a considered route, and , , and are three normalized related terms that can be expressed as follows:
where terms in the metric have been normalized in order to be comparable. At this moment, when node has to select among different routes to a destination, the choice of the best path is made by minimizing the following value:
The proposal establishes a time of 60 ms as parameter to update the period of calculation of the metric to select the next hop due to high speed and topology changes. This value is optimal in order to guarantee a correct path refresh.
4.2.14. VANET Routing Based on Real-Time Road-Vehicle Density
The basic idea in a routing protocol is to select the shortest route; in VANET, this could be a road with low vehicle density. To improve this, authors in [30] proposed a vehicular routing protocol that considers real-time road-vehicle-density information. Therefore, not only was position information used by vehicles, but also road-vehicle density was calculated. In this way, each vehicle could establish a reliable route to forward the information, as the reader can see in Figure 10.
In the proposed routing scheme, each node keeps the Road Information (RI) to store the path–vehicle density computed from the information in beacons. RI of a vehicle is generated when the vehicle enters the road and is updated upon receiving a beacon from a vehicle moving in the reverse direction. Each node estimates its own total quantity of reverse cars (TRC), and the value of the reverse car in its RI to calculate road-vehicle density and send signalling messages containing the calculated TRC value to its one-hop neighbors. It is possible to calculate the TRC value as shown in Equation (17):
where is the value of the Reverse Cars field (vehicles moving in the reverse direction), moving distance after entering the road is , and the length of the road. The value of the reverse-car field is increased by one when a vehicle receives a beacon. Then, the value of density of cars (DC) is modified as follows:
where is the TRC value of the vehicle, and the TRC value in the beacon. is the previously calculated , and the weight value.
These values are used in the RREP and RREQ schemes, and it finally selects the route with the highest MinDensity.
4.2.15. Pheromone-Based Vehicle to Vehicle (PBV2V) Routing
PBV2V Routing [25] is a bionic V2V routing scheme that introduces the concept of pheromones. All vehicles frequently exchange their position using beacons to vehicles in the same transmission range, as well as their pheromone densities.
In PBV2V, each vehicle receives and updates one broadcast message from each neighbor in every period, denoted by , and the set of i neighbors is represented by . For every potential destination d, vehicle i finds the set of neighbors that have the highest pheromone densities, i.e., Equation (20), and the highest pheromone value is .
If is not empty and , some neighbors must have higher pheromone density (i.e., closer to target d than i). Therefore, i sets its pheromone as . Otherwise, to simulate evaporation, the pheromone density of d is reduced by 1. So, the selection of the transmission path from source to destination is based on pheromone density. This proposal reduces network overhead and search time.
4.2.16. Adaptive Geographical Routing Based on Quality of Transmission for Urban Vehicular Networks (AGQOT)
In [42], AGQOT was proposed. The authors proposed a metric named quality of transmission (QOT) to measure the performance of each road segment, which combines the connectivity with Packet Delivery Ratio (PDR). They also proposed an improved greedy-forwarding strategy to guarantee fast and reliable packet transmission.
The novel metric, the proposed QOT represents connectivity and PDR together on the path segment, and it was evaluated as shown in Equation (21).
where represents QOT, indicates connectivity, and stands for the corresponding PDR when the path composed of vehicles is connected.
For convenience, the weight of each road segment was defined as the negative logarithm of the corresponding QOT, by which these weights across several road segments can be added, i.e., .
Finally, when a packet arrives at one intersection, several adjacent intersections appear as candidates. The one with larger QOT in the set obtains the higher priorities.
4.2.17. Speed Based on Demand Vector (SODV) Link Routing Protocol
In [43] SODV was presented, an AODV-based routing protocol. SODV improves the routing process and makes the selection of neighboring vehicles incresingly relevant by taking into account vehicle velocity in the packet-transmission process.
The authors selected the geometric average velocity to calculate the vehicle’s average velocity because it is more reliable and better reflects reality than arithmetic average velocity. Geometric average velocity is calculated as shown in Equation (22), and the number of nodes is variable from i to n.
Simulation analysis showed that SODV improved the AODV routing protocol, especially with regard to transmission delay.
4.2.18. Greedy Curvemetric Routing Protocol (GCRP)
GCRP [31] is a new routing protocol designed to select the next hop by using curvemetric distance instead of Euclidean distance. The authors took that each vehicular node acknowledges its position, direction, and velocity using a Global Position System (GPS) receiver, a preloaded digital map of the city that is mainly needed to calculate curvemetric distance. This protocol faces an important challenge in an urban environment due to radio obstacles such as trees and buildings that decrease signal quality and reduce the successful packet reception.
The following expression is used to calculate the curvemetric distance between two nodes:
where can be found by using the Dijkstra algorithm. Considering the situation in which the next-hop selection scope is a local optimum, if the forwarding node does not have any vehicle neighbors closer to the destination than itself, the carry-and-forward method is used, in which the forwarding node holds the packet until a new closer vehicle enters its transmission range. Finally, the proposal was evaluated via simulations in urban environments and compared it with GPSR protocol.
4.2.19. Reliable Intervehicular Routing (RIVER) Protocol
RIVER [11] is a position-based and greedy V2V routing protocol for vehicular ad hoc networks. This proposal choose the forwarding path by using traffic monitoring in real-time. RIVER is a geographic protocol that identifies the neighbor location using signaling messages. It also uses traffic monitoring to avoid routes with a sparse density which do not guarantee information transmission. So, traffic monitoring by RIVER can calculate reliable paths to forward data through the network. This proposal is not a shortest-path routing algorithm in a general sense; its edges are weighted with their reliability rating.
In the RIVER model, each node assigns a weight to every edge in its street graph. These weights are used to determine reliable routes based on first-hand observation (including information that each node sends or receives as messages to and from another node) and knowledge (including passive monitoring of known edge lists stored in beacons, probes, and routing packets). A small weight (the minimum weight is zero) indicates greater reliability; a large weight indicates an unreliable edge, and the maximum weight indicates an edge that is known to not be traversable.
When using reliability as a metric path, distance is still taken into consideration. Dijkstra’s least-weighted-path algorithm finds the least-weighted path based on the sum of the path weights. If two paths and have equal weights on each edge, but has more edges (is a longer path) than , then is chosen because its total weight is less. The shortest path between these two is chosen.
An example of this is demonstrated in Figure 11. In this figure, all edge weights (shown as w) except for → are of equal weight. Shortest path → represents an unreliable path where packets would be dropped if transmission were attempted along this path. The other two paths from to have equal edge weights along each edge, but the paths are different lengths. For path (→→→), the total weight is 3. Each edge of the other remaining path (→→→→→) is equally reliable, but the total weight is 5, so RIVER chooses the shorter path.
4.2.20. Greedy Perimeter Stateless Routing (GPRS)-Modified (GPSR-M)
The general idea of the GPSR forwarding process is to select the neighbor closest to the destination as the next hop. Due to the mobility of VANETs, that idea may not always be optimal. For this reason, in [44] GPSR-M was proposed that included a mechanism based not only on position, but also on speed, direction, and link quality. In the enhancement, two processes were also included, future-position prediction for establishing if nodes are moving in the same road and direction; and next-hop weight calculation.
The improved mechanism also incorporates a future-position prediction process (getFuturePos), a next-hop weight-calculation process (CalculateW) and a novel process that determines if nodes are moving in the same road and direction (inSameRD). Equation (24) shows how the future position is calculated.
where is a mapping function that returns the time from 1.0 up to 4.0 s based on the speed parameter. The returned period decreases if the speed increases.
To review if two vehicles follow the same road and have the same direction, a process calculates the vehicle-velocity vector angle, their dot product, and their line distance. With this information, the algorithm computes if they are moving on the same road. GPSR-M calls a procedure when packet transmission is needed. The best next-hop decision is made through the procedure that unchains the procedure. The resumed process is presented in Figure 12.
4.2.21. Anchor-Based Connectivity-Aware Routing (ACAR)
Position-based routing protocol ACAR for vehicular ad hoc networks was proposed in [45]. This protocol uses the greedy-forwarding approach and store–carry–forwarding to reduce loss of information. ACAR proposes to make routing more efficient in a fully connected scenario based on position and direction; in a network sparse scenario, selection is based on connectivity (density).
The proposal considers two scenarios: if the network is (1) dense or (2) sparse. In the first case, each vehicle knows the position and direction of itself and its neighbors (assuming the use of GPS). The data packet is then transferred from source to destination using this closest path. In the second case, if there is no neighboring vehicle in the range of the node that ensures connectivity, the store–carry–forward mechanism is started. This method introduces a delay, but it is more admissible than dropping the packet; the workflow is described in Figure 13.
4.2.22. Maxduration-Minangle GPSR (MM-GPSR)
GPSR presents some drawbacks because of the frequent communication with vehicles that could be out of range or construct a path with redundancy. To solve the above problems, MM-GPSR routing protocol was proposed in [46]. The enhancement in greedy forwarding first includes determining the allowed communication area, and then computing and comparing the cumulative communication duration of neighbor vehicles; finally, the neighbor with maximum duration is selected as the next hop. When greedy forwarding fails, the perimeter forwarding process is used. Improvements in this case include calculating and comparing angles from source to neighbor nodes and selecting the neighbor with minimum angle as the next hop to forward data.
In order to improve the greedy-forwarding scheme, the cumulative communication duration between the neighbor nodes in the communication range of the source is calculated by using Equation (25).
where is the current cumulative communication duration, is the last cumulative communication duration, is the current time of receiving , is the time of receiving the last . The value is compared with nodes in the communication range of the , and the node with maximum is steady and close to the destination, and is selected as the next hop.
Finally, to solve routing redundancy, enhanced perimeter forwarding takes the positional connection between neighbor and destination nodes into consideration. So, the proposal includes finding a next-hop node that does not deviate from to . To do this, if needed, it draws a line from to , and then draws lines from to any neighbor node. Each line through a neighbor node forms an angle with the line through the , and this angle is named as . By analyzing and comparing the corresponding of all neighbor nodes of the , an optimal next hop is selected.
4.2.23. Connectivity-Aware Intersection-Based Routing (CAIR) Protocol
CAIR [47] is a protocol designed to select a forwarding path as an optimal route that guarantees the best probability of connectivity and lower delay. This is due to constraints of vehicular networks like high mobility, periodic link disconnection, and vehicles with frequently changing density. In this proposal, a vehicle can know its own location and that of its neighbors by sporadically exchanging signalling messages. By using velocity, it is also possible to calculate position prediction, and forwarding nodes can choose the neighbor on the selected path as the next hop whose new predicted position is closest to the destination or the next intersection. CAIR uses a recovery strategy through the idea of store–carry–forward. Equation (26) presents the mechanism for the proposed position prediction.
where (, ) is the neighbors’ current position; (, ) is the previous position; s = (−) · speed, where is current time and is previous beacon time; and and speed are direction and moving velocity, respectively.
4.2.24. Distance and Signal Quality Aware Routing (DSQR)
DSQR protocol [48] bases its forwarding decisions on mid-area node selection; it evaluates the direction and distance of neighbor nodes, and also considers link quality to elect the best next forwarder node toward the destination node. DSQR is based on the following metrics:
- Forwarding region. DSQR uses the distance of nodes and defines the mid (midrea) and border area of the transmission range. To give higher priority to mid-area nodes, it reduces the breaking probability of the next forwarder, packet error, and delay. If there is no vehicle node located within the mid-area, then the source node adopts the carry-and-forward approach; an example is shown in Figure 14.
- Distance and direction. In geographic protocols, distance is a very important parameter for next-hop selection. Node positions are determined through GPS, where the Pythagoras theorem is utilized for distance evaluation between sources with its neighbor node. In this proposal, using a 3D space for distance calculation was considered, focusing on multilevel flyovers, bridges, tunnels, and over- or underpasses.
- Link-quality estimation. DSQR considers channel-quality measurement at the MAC. To evaluate channel quality, DSQR uses received signal strength (RSS) and the average link quality (ALQ), using past and current channel quality.
The DSQR initiates forwarding selection by looking for that vehicle node that is located in the mid-area; if there are no nodes in that area, then the source adopts the carry-and-forward approach to hold the packet for a specific time interval.
A summary of these proposals is presented in Table 5, where we can see the protocol, the year of the presentation, the metrics used to select the optimal path, the area of evaluation (urban or highway), if they use carry-and-forwarding as an alternative to dropping information in order to minimize losses, and, finally, which simulators were used in order to be evaluated and compared (including network simulator and mobility generator).
5. Discussion
As we see in the summary of Table 5, several proposals of routing protocols exist for vehicular networks. Recent improvements include metrics that are focused on the characteristics of this kind of network. An assumption of all proposals is the use of GPS due to the mobility present in them; knowing the localization of each node is very important to make the best choice of route. Distance and speed are preferred metrics, because the former can be seen as a progress rate of destination reachability, and the latter accounts for the behavior of the vehicular networks. Then, link life (also called link stability or link quality) is due to a good choice because it follows the route that guarantees perdurable communication to complete the transmission of data. Vehicle density is another metric commonly selected by authors that guarantees the opportunity to have enough options to select the best path. Moreover, Table 5 includes a rough number of operations that the proposed metrics require for a routing decision. Thus, this number of operations, including the “Metrics used” column, is presented as a function of the number of neighbors n. The provided number includes the effort to send or receive any additional signalling needed for it. From our results, metrics like mobility, trajectory, or link quality need more operations because they aim to predict future information. Of course, instantaneous values of these metrics are also possible to use, and usually only need one retrieve operation. In almost all protocols, a node uses a linear-dependent number of operations to make a forwarding decision by means of a weighted multimetric value for each neighbor. If there are not enough neighbors (low density), then some of the routing protocols use a well-known technique called carry-and-forwarding (maintain the packet until a good route could be selected). Other several important considered metrics exist that are mentioned in the summary, such as mobility, hops, direction, acceleration, and trajectory. It is important to study the scenarios and applications before selecting a protocol or in order to improve.
It is important to highlight that all the protocols in Table 5 have only been evaluated using network simulators in order to review behavior at the moment of selecting the next hop or forwarding path. This is mainly because both in cities and rural areas, communication technology is confronted with challenges, as every car must handle communication in a very short time and ensure quality simultaneously, especially when it comes to a real-time request. Conducting real experimentation about novel proposals could present a risk. The simulation is one of the most often used methods for the performance evaluation of VANETs, but by considering the use of a realistic mobility model for evaluation results to correctly indicate the real-world performance of the system [60,61]. However, as seen in [62] ETSI ITS-G5 (GeoNetworking protocol) was implemented and validated in a real environment in order to demonstrate the performance of the communication devices in real V2V with good results. In addition, [63] introduced functionality tests in two vehicular use cases using an information-centric networking protocol support in the ETSI ITS station protocol stack. Real experiments were made in the last few years to advance the implementation of these technologies in new vehicles in order to bring many benefits, like increasing road safety, improving traffic efficiency, and offering cloud services. The next step for these novel proposals is their experimentation in testbeds.
As we see in Table 5, the majority of the proposals were evaluated in urban areas because, due to the presence of obstacles, it is a greater challenge than highways, as there are quick topology changes. This allows the possibility of deploying most of the elements that make up a realistic road, such as traffic lights, stop, multilane roads, and roundabouts. It is also possible to include generating the movement pattern of vehicles in a different typology to be used by the simulator [64]. An urban zone also enables variation analysis of vehicle speed, density, and distance [65]. In the case of highways, routing protocols are not evaluated so deeply because velocities are mostly constants, and the environment normally represents long, sparse, and clear paths [66,67]; many routing protocols use the carry-and-forward method in these cases. Some evaluation in VANETs in highways focuses on propagation modeling, such as in [68].
Related to the research questions in Section 3.1, we concluded that position, direction, and density are the most used metrics, because these are the ones that consider the main characteristics of vehicle scenarios as movement, and consider the presence of other neighbors to make hop-by-hop communication. About the combination, a good proposal of metrics is one such as that proposed in [45], where the authors used position, direction, and density, obtaining good performance in terms of packet-delivery ratio and delay. These metrics are very frequently used and repeated in other proposals, but this special combination has good results in urban scenarios (that are more restricted by the presence of obstacles) regardless of vehicle density of the scenario due to the adaptability provided in the path selection. This helps for a fast-forwarding process for reaching the destination. On the other side, if the goal is to meet an offered QoS over forwarding speed, link quality and stability are some of the metrics that should be included in path selection. In this analysis, in GPSR results, as the protocol with the higher number of comparatives, more than half of the protocols presented were compared with GPSR because GPSR is the base of geographic protocols that are the angular piece in vehicular routing. Finally, in relation to the used simulator, the most used software for analysis is NS-2. Deploying and testing VANETs imply high cost and intensive labor. For this reason, simulations are a helpful alternative preceding actual implementation [69,70]. Many researchers select NS-2 because it is an open-source simulator, has already had many implementations, and it is easy to edit to their needs. NS-2 also allows the use of several mobility generators, such as VanetMobiSim, MOVE, or SUMO, which improve the scenario design, making evaluations more realistic [71,72]. However, several recent investigations have shown a tendency to use Veins and OMNET [73].
As gaps in this literature review, it is important to mention the importance of evaluating new proposals in the same environments, which can include the same simulator and same area (urban or highway) in order to make a fair comparison.
5.1. Nonfunctional Metrics
The main goals of V2V and V2I communications are to improve safety, reduce road traffic, and reduce accidents. So, the main task of a routing protocol is to improve the opportunity to send a message by the best route, delivering data in a faster mode. Nonetheless, an important issue in vehicular communication is if the shared information is correct. In general, all of the traditional aspects of security–privacy, confidentiality, integrity, nonrepudiation, and others, must be applied to VANET communication to prevent compromising traffic safety and causing material damage or even loss of life [74,75]. So, security aspects could be considered nonfunctional metrics. In [76], the authors proposed a communication model to provide vehicle-location privacy. In case that V2I communication is being established, driver privacy must be guaranteed. Trust management is crucial in VANET routing because interchanging false information could cause much damage. Reliable routing and communication are very important, which are analyzed in [77]. Some of these nonfunctional metrics could be introduced in the routing protocols for VANETs in order to guarantee data reliability, as mentioned below.
- Anonymity/Privacy: the objective is to conceal who communicates to whom to a neighbor who observes the interchange of data of the anonymous communication channel.
- Trust: it is important to incorporate mutual trust between vehicles, mainly in the routing process, because one or more malicious neighbors may attempt to disrupt route discovery or data transmission in the network.
When V2I communication is established, information about the vehicle (location, route, etc.) is shared. So, some proposals to maintain a level of privacy were presented, such as [76] that proposed the Pass and Run protocol that first passes information through the VANET (considered in this case was a delay tolerant network (DTN)) before reaching an RSU to maintain vehicle-location privacy. In the DTN, metrics such as distance and direction are taken into account from vehicle source to RSU. In [78], a protocol was presented based on Crowd [79], an approach where each vehicle probabilistically decides to directly send a message to a common receiver or to forward it to a peer, who is asked to repeat the process. The objective is to offer privacy in V2V communication. The proposal was evaluated jointly with AODV and GPSR as VANET routing protocols. This potentially opens a new set of routing protocols where there is a tradeoff between speed and secure forwarding.
5.2. VANET Integration with Other Technologies
One of the most viable communication standards by the Third Generation Partnership Project for vehicular networking is long-term evolution (LTE). LTE standard offers high throughput and lower latency. Its downlink and uplink data rates are 300 and 75 Mbps, respectively [80]. LTE technology improves cost and performance efficiency due to the simplification in network architecture (fewer network elements) and advanced algorithms for resource utilization [81]. Nowadays, cellular networks such as 3G or LTE have wide communication range and coverage, which are ideal characteristics for vehicular-network scenarios. Combinations of VANET technology with 3G or LTE form a heterogeneous network that is adopted for data collection and dissemination to/from vehicles to manage road traffic. Based on this idea, [82] proposed a solution based on speed, location, direction, destination, and LTE link quality. In [80,83], LTE was used in VANET scenarios. In [83], a hybrid solution was highlighted that integrates LTE-A (4G LTE-Advanced), which is a less complex and more cost-effective solution compared to other options. Each vehicle could use its LTE-A interface for V2I communications, offering a reduction in mobility signalling overhead. In [80], a hybrid architecture was proposed that combined IEEE 802.11p-based multihop clustering and LTE called VMaSC-LTE. The principal goals in these heterogeneous network proposals are to achieve a high data-packet-delivery ratio and low delay while keeping the usage of the cellular infrastructure. However, they are not focused on routing design because these proposals use infrastructure-based LTE without direct communication among vehicles, so messages pass through the infrastructure.
The development of Fifth Generation (5G) networks made the internet ubiquitous Internet and the growth of new applications possible. This is also possible in VANET by internet of vehicles (IoV) communication that uses network infrastructure to allow cars to be connected to new radio technologies [84]. It is worth noting that the proposals reviewed in this article have tested by using DSRC framework. However, thanks to LTE device-to-device technology [85] that can be implemented in a decentralized fashion, the performance of all proposals could be significantly improved. LTE D2D has been the perfect candidate to improve communication in VANETs. Since LTE D2D offers improvements in terms of capacity, cost reaction, and spectral efficiency, some car manufacturers are using it to provide applications such as remote monitoring, assisted driving, and infotainment. Thus, extensive simulation tests should be performed for routing proposals under the decentralized LTE device-to-device umbrella. This would help VANET communication meet the 5G requirement in terms of throughput and latency [86] because current performance (under DSRC umbrella) is far from this according to the presented results.
5.3. Dissemination
The other insensitive study routing application is dissemination. The goal of data-dissemination algorithms in VANETs is to deliver information to drivers, passengers, and vehicles, typically in emergency situations. So, it is important to consider that information has to be distributed to all the vehicles in the interest area [87,88]. The main challenge when dissemination is used is how information should be distributed, taking into account characteristics in a VANET like mobility. In VANET, communication V2V, V2I, and Vehicle to Roadside (V2R) are allowed, and information dissemination is important. Flooding is the easiest mechanism but generates the known storm problem in dense scenarios. To reduce this problem, protocols were designed based on smart dissemination. The objective in [89] was to define a distributed dissemination protocol that supports high-rate message flows and does not use beacon messages. This proposal took into account metrics like distance, density, and the number of hops, and it is called timer-based distributed dissemination protocol for VANETs. The authors in [90] proposed a warning service to prevent accidents by alerting drivers about accidents and dangerous road conditions using a dissemination mechanism. The proposal used several metrics in the broadcast-dissemination mechanism, such as density, weighted moving average, and vehicle direction. The investigation in [91] presented a decentralized stochastic proposal called Adaptive Distributed Dissemination (ADD), for the data-dissemination problem using two game-theoretical mechanisms. The goal was to disseminate warning messages to all vehicles inside the region of interest (ROI). Metrics like vehicle location, direction, and velocity were also included. The mechanism to carry the stored message was also used in cases of sparse traffic zones.
The dissemination approach can also function as a technique of information distribution in a vehicular network. This method deals with the avoidance of the storm problem in order to accurately send information. Even though it is a novel and challenging topic in VANETs, we did not consider it with deeper analysis because it is out of the focus of our topic, which is routing protocols that select a path hop-by-hop by using several metrics. As future work, it would be interesting to compare between the two approaches, routing and dissemination.
6. Conclusions
VANETs are the main component of communication framework intelligent transportation systems; therefore, they have been extensively studied from both industry and academia in the last twenty years.
It is expected that vehicles will be equipped with advanced onboard units, multiple communication technologies, and sensor platforms. VANETs provide important information to drivers by using vehicle-to-vehicle communications. Since VANETs are a distributed, self-organized network, a key component in their operation to guarantee their minimal dependence in fixed infrastructure routing plays a crucial role.
In this article, we discussed the importance of developing routing protocols in VANETs and summarized some that are especially proposed for this kind of wireless networks. More precisely, we focused on proposals that use several metrics to select the forwarding path, presenting the importance of these metrics in the behavior of vehicular networks, and how their selection can improve in vehicle communication. We presented the characteristics of these routing protocols (i.e., year of release, area of evaluation, metrics used) and how they are evaluated (i.e., simulators and mobility generators).
In general, after analyzing the contents of Table 5, we concluded that link stability (or link lifetime or stability), position, density, and speed are the more promising metrics in routing protocols for VANETs because of geographical constraints. However, the performance of a routing protocol in vehicles’ networks is very related with the mobility model, for that reason, other metrics that provide good performance are direction, trajectory or acceleration that are very related to the mobility of the network.
In a nutshell, depending on the application of VANETs, it is necessary to design specific routing protocols and consider the mobility model to fulfil its requirements. Even though routing in VANETs has received more attention in the wireless-network community, there are still quite a few challenges that have not yet been carefully investigated. New directions in the development of VANET routing protocols include artificial intelligence [92] or trust in communications [93]. As future work, we are gathering statistics of VANET routing protocols reported in the literature to carry out meta-analysis of VANET performance.
Author Contributions
C.T.-B. developed the proposal of the study, carried out the information search and analysis of the investigation, and did most of the writing. L.U.-A. wrote several sections, made corrections, and edited the paper. A.Z.-C. and J.A.A.-C. made corrections throughout the manuscript and guided the entire process. All authors contributed to the selection of papers to be analyzed from the searching results in order to provide a more comprehensible final version.
Funding
This work has partially been supported by the “Universidad Autónoma de Sinaloa” (UAS, México) by PRODEP.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Dimitrakopoulos, G.; Demestichas, P. Intelligent Transportation Systems. IEEE Veh. Technol. Mag. 2010, 5, 77–84. [Google Scholar] [CrossRef]
- Boeglen, H.; Hilt, B.; Lorenz, P.; Ledy, J.; Poussard, A.; Vauzelle, R. A survey of V2V channel modeling for VANET simulations. In Proceedings of the 2011 Eighth International Conference on Wireless On-Demand Network Systems and Services, Bardonecchia, Italy, 26–28 January 2011; pp. 117–123. [Google Scholar] [CrossRef]
- Shahen Shah, A.F.M.; Ilhan, H.; Tureli, U. CB-MAC: A novel cluster-based MAC protocol for VANETs. IET Intell. Transp. Syst. 2019, 13, 587–595. [Google Scholar] [CrossRef]
- Schoch, E.; Kargl, F.; Leinmüller, T.; Schlott, S.; Papadimitratos, P. Impact of Pseudonym Changes on Geographic Routing in VANETs. In Security and Privacy in Ad-Hoc and Sensor Networks; Lecture Notes in Computer Science; Buttyán, L., Gligor, V.D., Westhoff, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4357, pp. 43–57. [Google Scholar] [CrossRef]
- Abbas, F.; Fan, P.; Khan, Z. A novel reliable low-latency multipath routing scheme for vehicular ad hoc networks. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 1–19. [Google Scholar] [CrossRef]
- Sivaraj, R.; Gopalakrishna, A.K.; Chandra, M.G.; Balamuralidhar, P. QoS-enabled group communication in integrated VANET-LTE heterogeneous wireless networks. In Proceedings of the 2011 IEEE 7th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Wuhan, China, 10–12 October 2011; pp. 17–24. [Google Scholar] [CrossRef]
- Li, F.; Wang, Y. Routing in vehicular ad hoc networks: A survey. IEEE Veh. Technol. Mag. 2007, 2, 12–22. [Google Scholar] [CrossRef]
- Wahid, I.; Ikram, A.A.; Ahmad, M.; Ali, S.; Ali, A. State of the Art Routing Protocols in VANETs: A Review. Procedia Comput. Sci. 2018, 130, 689–694. [Google Scholar] [CrossRef]
- Altayeb, M.; Mahgoub, I. A Survey of Vehicular Ad hoc Networks Routing Protocols. Int. J. Innov. Appl. Stud. 2013, 3, 829–846. [Google Scholar]
- Mezher, A.M.; Igartua, M.A. Multimedia Multimetric Map-Aware Routing Protocol to Send Video-Reporting Messages over VANETs in Smart Cities. IEEE Trans. Veh. Technol. 2017, 66, 10611–10625. [Google Scholar] [CrossRef]
- Bernsen, J. A Reliability-Based Routing Protocol for Vehicular Ad-Hoc Networks Title of Thesis. Master’s Thesis, College of Engineering, University of Kentuck, Lexington, KY, USA, 2011. [Google Scholar]
- Sottile, C.; Santamaria, A.F.; Marano, S. A reactive routing protocol for VANETs based on composite metric concept. In Proceedings of the International Symposium on Performance Evaluation of Computer and Telecommunication Systems (SPECTS 2014), Monterey, CA, USA, 6–10 July 2014; pp. 642–646. [Google Scholar] [CrossRef]
- Sharef, B.T.; Alsaqour, R.A.; Ismail, M. Vehicular communication ad hoc routing protocols: A survey. J. Netw. Comput. Appl. 2014, 40, 363–396. [Google Scholar] [CrossRef]
- Stallings, W. Data and Computer Communications; Prentice Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Lee, K.; Lee, U.; Gerla, M. Survey of Routing Protocols in Vehicular Ad Hoc Networks. In Advances in Vehicular Ad-Hoc Networks: Developments and Challenges; IGI Global: Hershey, PA, USA, 2009; pp. 149–170. [Google Scholar]
- Gaikwad, D.S.; Zaveri, M. VANET Routing Protocols and Mobility Models: A Survey. In Trends in Network and Communications; Wyld, D.C., Wozniak, M., Chaki, N., Meghanathan, N., Nagamalai, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 334–342. [Google Scholar]
- Dua, A.; Kumar, N.; Bawa, S. A systematic review on routing protocols for Vehicular Ad Hoc Networks. Veh. Commun. 2014, 1, 33–52. [Google Scholar] [CrossRef]
- Boussoufa-Lahlah, S.; Semchedine, F.; Bouallouche-Medjkoune, L. Geographic routing protocols for Vehicular Ad hoc NETworks (VANETs): A survey. Veh. Commun. 2018, 11, 20–31. [Google Scholar] [CrossRef]
- Cha, S.H. A Survey of Greedy Routing Protocols for Vehicular Ad Hoc Networks. Smart Comput. Rev. 2002, 2, 125–137. [Google Scholar] [CrossRef]
- Tornell, S.M.; Calafate, C.T.; Cano, J.C.; Manzoni, P. DTN Protocols for Vehicular Networks: An Application Oriented Overview. IEEE Commun. Surv. Tutor. 2015, 17, 868–887. [Google Scholar] [CrossRef]
- Liu, J.; Wan, J.; Wang, Q.; Deng, P.; Zhou, K.; Qiao, Y. A survey on position-based routing for vehicular ad hoc networks. Telecommun. Syst. 2015. [Google Scholar] [CrossRef]
- Tripp-Barba, C. Contribution to Design a Communication Framework for Vehicular Ad hoc Networks in Urban Scenarios. Ph.D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2013. [Google Scholar]
- Kitchenham, B. Procedures for Performing Systematic Reviews; Technical Report tr/se-0401; Department of Computer Science, Keele University: Keele, UK, 2004. [Google Scholar]
- Patil, P.; Peng, R.D.; Leek, J.T. A visual tool for defining reproducibility and replicability. Nat. Hum. Behav. 2019, 3, 650–652. [Google Scholar] [CrossRef]
- Kuo, W.; Dong, S.; Huang, J. Pheromone-Based V2V unicast routing scheme in VANETs. In Proceedings of the 2013 International Conference on Connected Vehicles and Expo (ICCVE), Las Vegas, NV, USA, 2–6 December 2013; pp. 783–784. [Google Scholar] [CrossRef]
- Perkins, C.E.; Royer, E.M. Ad-hoc on-demand distance vector routing. In Proceedings of the Second IEEE Workshop on Mobile Computing Systems and Applications, Proceedings WMCSA’99, New Orleans, LA, USA, 25–26 February 1999; pp. 90–100. [Google Scholar] [CrossRef]
- Peng, X.; Wu, Y.; Xu, Z.; Lin, X. AODV-MR: AODV with multi-RREP for VANET. In Proceedings of the 7th IEEE/International Conference on Advanced Infocomm Technology, Fuzhou, China, 14–16 November 2014; pp. 172–176. [Google Scholar] [CrossRef]
- Karp, B.; Kung, H.T. GPSR: Greedy Perimeter Stateless Routing for Wireless Networks. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, MobiCom ’00, Boston, MA, USA, 6–11 August 2000; ACM: New York, NY, USA, 2000; pp. 243–254. [Google Scholar] [CrossRef]
- European Telecommunications Standards Institute (ETSI). ETSI TS 102 636-4-1 v1.2.1; Intelligent Transport Systems (ITS); Vehicular Communications; GeoNetworking; Part 4: Geographical Addressing and Forwarding for Point-to-Point and Point-to-Multipoint Com-munications; Sub-Part 1: Media-Independent Functionality; European Telecommunications Standards Institute (ETSI): Sophia Antipolis, France, 2014. [Google Scholar]
- Yu, H.; Yoo, J.; Ahn, S. A VANET routing based on the real-time road vehicle density in the city environment. In Proceedings of the 2013 Fifth International Conference on Ubiquitous and Future Networks (ICUFN), Da Nang, Vietnam, 2–5 July 2013; pp. 333–337. [Google Scholar] [CrossRef]
- Nebbou, T.; Lehsaini, M. Greedy Curvemetric-based Routing Protocol for VANETs. In Proceedings of the 2018 International Conference on Selected Topics in Mobile and Wireless Networking (MoWNeT), Tangier, Morocco, 20–22 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Kuhlmorgen, S.; Llatser, I.; Festag, A.; Fettweis, G. Performance Evaluation of ETSI GeoNetworking for Vehicular Ad Hoc Networks. In Proceedings of the 2015 IEEE 81st Vehicular Technology Conference (VTC Spring), Glasgow, UK, 11–14 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Sandonis, V.; Soto, I.; Calderon, M.; Urueña, M. Vehicle to Internet Communications Using the ETSI ITS GeoNetworking Protocol. Trans. Emerg. Telecommun. Technol. 2016, 27, 373–391. [Google Scholar] [CrossRef]
- Kuehlmorgen, S.; Schmager, P.; Festag, A.; Fettweis, G. Simulation-Based Evaluation of ETSI ITS-G5 and Cellular-VCS in a Real-World Road Traffic Scenario. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Kumari, N.D.; Shylaja, B. AMGRP: AHP-based Multimetric Geographical Routing Protocol for Urban environment of VANETs. J. King Saud Univ. Comput. Inf. Sci. 2019, 31, 72–81. [Google Scholar] [CrossRef]
- Shen, X.; Wu, Y.; Xu, Z.; Lind, X. AODV-PNT: An improved version of AODV routing protocol with predicting node trend in VANET. In Proceedings of the 7th IEEE/International Conference on Advanced Infocomm Technology, Fuzhou, China, 14–16 November 2014; pp. 91–97. [Google Scholar] [CrossRef]
- Wang, X.; Liu, W.; Yang, L.; Zhang, W.; Peng, C. A new content-centric routing protocol for Vehicular Ad Hoc Networks. In Proceedings of the 2016 22nd Asia-Pacific Conference on Communications (APCC), Yogyakarta, Indonesia, 25–27 August 2016; pp. 552–558. [Google Scholar] [CrossRef]
- Chakroun, O.; Cherkaoui, S.; Rezgui, J. MUDDS: Multi-metric Unicast Data Dissemination Scheme for 802.11p VANETs. In Proceedings of the 2012 8th International Wireless Communications and Mobile Computing Conference (IWCMC), Yogyakarta, Indonesia, 25–27 August 2012; pp. 1074–1079. [Google Scholar] [CrossRef]
- Chen, Q.; Cheng, N.; Wang, X.; Liu, F. Multi-metric Opportunistic Routing for VANETs in Urban Scenario. In Proceedings of the 2011 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery, Limassol, Cyprus, 27–31 August 2011; pp. 118–122. [Google Scholar] [CrossRef]
- Wang, X.; Yang, Y.; An, J. Multi-metric Routing Decisions in VANET. In Proceedings of the 2009 Eighth IEEE International Conference on Dependable, Autonomic and Secure Computing, Beijing, China, 10–12 October 2009; pp. 551–556. [Google Scholar] [CrossRef]
- Kasana, R.; Kumar, S. Multimetric Next Hop Vehicle Selection for Geocasting in Vehicular Ad-hoc Networks. In Proceedings of the 2015 IEEE International Conference on Computational Intelligence Communication Technology, Chengdu, China, 12–14 December 2015; pp. 400–405. [Google Scholar] [CrossRef]
- Li, X.; Chen, C.; Wang, Z.; Liu, L.; Lv, J. An Adaptive Geographic Routing Protocol Based on Quality of Transmission in Urban VANETs. In Proceedings of the 2018 IEEE International Conference on Smart Internet of Things (SmartIoT), Ghaziabad, India, 13–14 February 2018; pp. 52–57. [Google Scholar] [CrossRef]
- Manel, K.; Lamia, C. SODV speed based ad hoc on demand vector link routing protocol: A routing protocol for VANET networks. In Proceedings of the 2017 Sixth International Conference on Communications and Networking (ComNet), Xi’an, China, 17–19 August 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Bouras, C.; Kapoulas, V.; Tsanai, E. A GPSR Enhancement Mechanism for Routing in VANETs. In Wired/Wireless Internet Communications; Aguayo-Torres, M.C., Gómez, G., Poncela, J., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 94–107. [Google Scholar] [Green Version]
- Ghafoor, H.; Koo, I.; ud Din Gohar, N. Neighboring and Connectivity-Aware Routing in VANETs. Sci. World J. 2014, 2014, 1–10. [Google Scholar] [CrossRef]
- Yang, X.; Li, M.; Qian, Z.; Di, T. Improvement of GPSR Protocol in Vehicular Ad Hoc Network. IEEE Access 2018, 6, 39515–39524. [Google Scholar] [CrossRef]
- Chen, C.; Jin, Y.; Pei, Q.; Zhang, N. A connectivity-aware intersection-based routing in VANETs. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 42. [Google Scholar] [CrossRef]
- Qureshi, K.N.; Bashir, F.; Abdullah, A.H. Distance and signal quality aware next hop selection routing protocol for vehicular ad hoc networks. Neural Comput. Appl. 2019. [Google Scholar] [CrossRef]
- OpenStreetMap. Available online: https://www.openstreetmap.org/ (accessed on 3 March 2019).
- SUMO—Simulation of Urban Mobility. Available online: http://sumo.sourceforge.net/ (accessed on 4 March 2019).
- OMNeT++. Available online: https://omnetpp.org/ (accessed on 8 April 2019).
- The Network Simulator NS-2. Available online: https://www.isi.edu/nsnam/ns/ (accessed on 8 April 2019).
- NS3 Network Simulator. Available online: https://www.nsnam.org/ (accessed on 8 April 2019).
- Mezher, A.M.; Oltra, J.J.; Aguiar, L.U.; Paredes, C.I.; Barba, C.T.; Igartua, M.A. Realistic Environment for VANET Simulations to Detect the Presence of Obstacles in Vehicular Ad Hoc Networks. In Proceedings of the 11th ACM Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, & Ubiquitous Networks, PE-WASUN ’14, Montreal, QC, Canada, 21–26 September 2014; ACM: New York, NY, USA, 2014; pp. 77–84. [Google Scholar] [CrossRef]
- MOVE. Available online: http://www.csie.ncku.edu.tw/~klan/data/materials/mobicom2005.pdf (accessed on 22 May 2019).
- VanetMobiSim. Available online: http://vanet.eurecom.fr/ (accessed on 27 May 2019).
- JOSM. Available online: https://josm.openstreetmap.de/ (accessed on 28 May 2019).
- BonnMotion. Available online: http://sys.cs.uos.de/bonnmotion/ (accessed on 28 May 2019).
- MatLab. Available online: https://www.mathworks.com/products/matlab.html (accessed on 29 May 2019).
- Cabarkapa, D.; Milicevic, M. Importance of Realistic Mobility Software Models for VANETs Simulations. In Proceedings of the International Conference on Information Technology and Development of Education, ITRO’16, Zrenjanin, Serbia, June 2016; pp. 306–311. Available online: http://www.tfzr.rs/itro/Zbornik%20ITRO%202016.pdf (accessed on 3 June 2019).
- Boukenadil, B. Importance of Realistic Mobility Models for Vanet Network Simulation. Int. J. Comput. Netw. Commun. 2014, 6. [Google Scholar] [CrossRef]
- Talavera, E.; Anaya, J.J.; Gómez, O.; Jiménez, F.; Naranjo, J.E. Performance Comparison of Geobroadcast Strategies for Winding Roads. Electronics 2018, 7, 32. [Google Scholar] [CrossRef]
- Tan, A. Prototype Implementation of a Wireless Vehicular Information-Centric Testbed. Master’s Thesis, University of Applied Sciences Munich, Bavaria, Germany, 2017. [Google Scholar]
- Fuentes, E.; Valencia, A.; Ramos Valencia, V.; Flores Pulgar, T. Estudio de las VANET para Control Vehicular en las Calles de Riobamba: Primeros Desarrollos. In Proceedings of the X Conferencia Científica en Telecomunicaciones, Tecnologías de la Información y Comunicaciones, Quito, Ecuador, 17–20 October 2016. [Google Scholar]
- Palaguachi, D.A.A.; Tenempaguay, E.E.E. Diseno De Una Red De Comunicacion Vehicular Inteligente, Integrando La Tecnologia Ad-Hoc Con Lte, Para La Movilidad En La Zona Urbana De La Ciudad De Cuenca. Master’s Thesis, Universidad Politecnica Salesiana, Cuenca, Ecuador, 2015. [Google Scholar]
- Leiva, R.S. Simulacion de VANETS (Vehicular Ad-Hoc Networks). Master’s Thesis, Universitat Politecnica de Catalunya, Barcelona, Spain, 2007. [Google Scholar]
- Wei, X.; Qing-Quan, L. Performance evaluation of data disseinations for vehicular ad hoc networks in highway scenarios. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2008, 37 Pt B1, 1015–1020. [Google Scholar]
- Schumacher, H.; Tchouankem, H. Highway propagation modeling in VANETS and its impact on performance evaluation. In Proceedings of the 2013 10th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Banff, AB, Canada, 18–20 March 2013; pp. 178–185. [Google Scholar] [CrossRef]
- Martinez, F.; Toh, C.; Cano, J.C.; Calafate, C.; Manzoni, P. A survey and comparative study of simulators for vehicular ad hoc networks (VANETs). Wirel. Commun. Mob. Comput. 2011, 11, 813–828. [Google Scholar] [CrossRef]
- Doumenc, H. Estudio Comparatio de Protocolos de Encaminamiento en Redes VANET. Master’s Thesis, Universidad Politecnica de Madrid, Madrid, Spain, 2008. [Google Scholar]
- Poonia, R.C. Integration of traffic and network simulators for vehicular ad-hoc networks. J. Inf. Optim. Sci. 2018, 39, 1583–1589. [Google Scholar] [CrossRef]
- Services and simulation frameworks for vehicular cloud computing: A contemporary survey. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 4. [CrossRef]
- Sommer, C.; Eckhoff, D.; Brummer, A.; Buse, D.S.; Hagenauer, F.; Joerer, S.; Segata, M. Veins: The Open Source Vehicular Network Simulation Framework. In Recent Advances in Network Simulation: The OMNeT++ Environment and Its Ecosystem; Virdis, A., Kirsche, M., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 215–252. [Google Scholar] [CrossRef]
- Biswas, S.; Haque, M.M.; Misic, J.V. Privacy and Anonymity in VANETs: A Contemporary Study. Ad Hoc Sens. Wirel. Netw. 2010, 10, 177–192. [Google Scholar]
- Dötzer, F. Privacy Issues in Vehicular Ad Hoc Networks. In Privacy Enhancing Technologies; Danezis, G., Martin, D., Eds.; Springer: Berlin/Heidelberg, Germnay, 2006; pp. 197–209. [Google Scholar]
- Dunbar, C.; Gao, M.; Qu, G. Pass and run: A privacy preserving delay tolerant network communication protocol for CyberVehicles. In Proceedings of the 2013 International Conference on Connected Vehicles and Expo (ICCVE), Las Vegas, NV, USA, 2–6 December 2013; pp. 840–841. [Google Scholar] [CrossRef]
- Patel, N.J.; Jhaveri, R.H. Trust Based Approaches for Secure Routing in VANET: A Survey. Procedia Comput. Sci. 2015, 45, 592–601. [Google Scholar] [CrossRef] [Green Version]
- Tripp Barba, C.; Urquiza Aguiar, L.; Aguilar Igartua, M.; Parra-Arnau, J.; Rebollo-Monedero, D.; Forné, J.; Pallarès, E. A Collaborative Protocol for Anonymous Reporting in Vehicular Ad Hoc Networks. Comput. Stand. Interfaces 2013, 36, 188–197. [Google Scholar] [CrossRef]
- Reiter, M.K.; Rubin, A.D. Crowds: Anonymity for Web Transactions; Technical Report; Center for Discrete Mathematics & Theoretical Computer Science: Princeton, NJ, USA, 1997. [Google Scholar]
- Ucar, S.; Ergen, S.C.; Ozkasap, O. Multihop-Cluster-Based IEEE 802.11p and LTE Hybrid Architecture for VANET Safety Message Dissemination. IEEE Trans. Veh. Technol. 2016, 65, 2621–2636. [Google Scholar] [CrossRef]
- Hameed Mir, Z.; Filali, F. LTE and IEEE 802.11p for vehicular networking: A performance evaluation. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 89. [Google Scholar] [CrossRef]
- Ahmad, I.; Noor, R.M.; Ahmedy, I.; Shah, S.A.A.; Yaqoob, I.; Ahmed, E.; Imran, M. VANET–LTE based heterogeneous vehicular clustering for driving assistance and route planning applications. Comput. Netw. 2018, 145, 128–140. [Google Scholar] [CrossRef]
- Chekkouri, A.S.; Ezzouhairi, A.; Pierre, S. A new integrated VANET-LTE-A architecture for enhanced mobility in small cells HetNet using dynamic gateway and traffic forwarding. Comput. Netw. 2018, 140, 15–27. [Google Scholar] [CrossRef]
- Storck, C.R.; Duarte-Figueiredo, F. A 5G V2X Ecosystem Providing Internet of Vehicles. Sensors 2019, 19, 550. [Google Scholar] [CrossRef] [PubMed]
- Gallo, L.; Haerri, J. Unsupervised Long- Term Evolution Device-to-Device: A Case Study for Safety-Critical V2X Communications. IEEE Veh. Technol. Mag. 2017, 12, 69–77. [Google Scholar] [CrossRef]
- Series, M. IMT Vision–Framework and Overall Objectives of the Future Development of IMT for 2020 and Beyond; ITU Publications: Geneva, Switzerland, 2015. [Google Scholar]
- Baiocchi, A.; Salvo, P.; Cuomo, F.; Rubin, I. Understanding Spurious Message Forwarding in VANET Beaconless Dissemination Protocols: An Analytical Approach. IEEE Trans. Veh. Technol. 2016, 65, 2243–2258. [Google Scholar] [CrossRef]
- Ali, M.; Malik, A.W.; Rahman, A.U.; Iqbal, S.; Hamayun, M.M. Position-based emergency message dissemination for Internet of vehicles. Int. J. Distrib. Sens. Netw. 2019, 15, 1–12. [Google Scholar] [CrossRef]
- Salvo, P.; De Felice, M.; Baiocchi, A.; Cuomo, F.; Rubin, I. Timer-Based Distributed Dissemination Protocols for VANETs and Their Interaction with MAC Layer. In Proceedings of the 2013 IEEE 77th Vehicular Technology Conference (VTC Spring), Dresden, Germany, 2–5 June 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Garcia-Lozano, E.; Barba, C.T.; Igartua, M.A.; Campo, C. A distributed, bandwidth-efficient accident prevention system for interurban VANETs. In Proceedings of the 2013 International Conference on Smart Communications in Network Technologies (SaCoNeT), Paris, France, 17–19 June 2013; Volume 1, pp. 1–5. [Google Scholar] [CrossRef]
- Iza-Paredes, C.; Mezher, A.A.I.M.F.J. Game-Theoretical Design of an Adaptive Distributed Dissemination Protocol for VANETs. Sensors 2018, 18, 294. [Google Scholar] [CrossRef]
- Tong, W.; Hussain, A.; Bo, W.X.; Maharjan, S. Artificial Intelligence for Vehicle-to-Everything: A Survey. IEEE Access 2019, 7, 10823–10843. [Google Scholar] [CrossRef]
- Xia, H.; Zhang, S.S.; Li, B.x.; Li, L.; Cheng, X.G. Towards a Novel Trust-Based Multicast Routing for VANETs. Secur. Commun. Netw. 2018, 2018, 1–12. [Google Scholar] [CrossRef]
Figure 1.
Example of a vehicular ad hoc network (VANET) scenario: accident-information dissemination using vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) to send data to emergencies services.
Figure 1.
Example of a vehicular ad hoc network (VANET) scenario: accident-information dissemination using vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) to send data to emergencies services.

Figure 2.
Multimetric routing protocols proposed for VANETs along time. (a) Bars account for multimetric routing proposals grouped by network simulator. All routing proposals for VANETs over the years are plotted in lines for different network simulators. (b) Distribution of network simulator that used multimetric routing proposals.
Figure 2.
Multimetric routing protocols proposed for VANETs along time. (a) Bars account for multimetric routing proposals grouped by network simulator. All routing proposals for VANETs over the years are plotted in lines for different network simulators. (b) Distribution of network simulator that used multimetric routing proposals.

Figure 3.
Systematic literature-review (SLR) selection process.

Figure 4.
Density example.

Figure 5.
In this scenario node, s should select neighbor a as next hop, but even if that is not the closest to destination D, b ensures a better link lifetime than a.
Figure 5.
In this scenario node, s should select neighbor a as next hop, but even if that is not the closest to destination D, b ensures a better link lifetime than a.

Figure 6.
Node s should select the green vehicle that is moving toward destination D, thus being the node with the correct movement direction in this example.
Figure 6.
Node s should select the green vehicle that is moving toward destination D, thus being the node with the correct movement direction in this example.

Figure 7.
Greedy perimeter stateless routing (GPSR) operation. (a) greedy-forwarding example. b is the x’s closest neighbor to D. (b) In perimeter mode, node x is void with respect to destination D.
Figure 7.
Greedy perimeter stateless routing (GPSR) operation. (a) greedy-forwarding example. b is the x’s closest neighbor to D. (b) In perimeter mode, node x is void with respect to destination D.

Figure 8.
Path considered by source in analytical hierarchical process (AHP)-based multimetric geographical-routing protocol (AMGRP) and in GPSR to reach destination [35].
Figure 8.
Path considered by source in analytical hierarchical process (AHP)-based multimetric geographical-routing protocol (AMGRP) and in GPSR to reach destination [35].

Figure 9.
Hop-count-based metric without line of sight (LOS) [37].
Figure 9.
Hop-count-based metric without line of sight (LOS) [37].

Figure 10.
Example with various road-vehicle densities [30].
Figure 10.
Example with various road-vehicle densities [30].

Figure 11.
Example of three potential paths in reliable intervehicular routing (RIVER).

Figure 12.
Mechanism procedure of greedy perimeter stateless routing (GPRS)-modified (GPSR-M) [44].
Figure 12.
Mechanism procedure of greedy perimeter stateless routing (GPRS)-modified (GPSR-M) [44].

Figure 13.
Workflow for anchor-based connectivity-aware routing (ACAR) [45].
Figure 13.
Workflow for anchor-based connectivity-aware routing (ACAR) [45].

Figure 14.
Mid-area and border-area example [48].
Figure 14.
Mid-area and border-area example [48].


{kind=link}
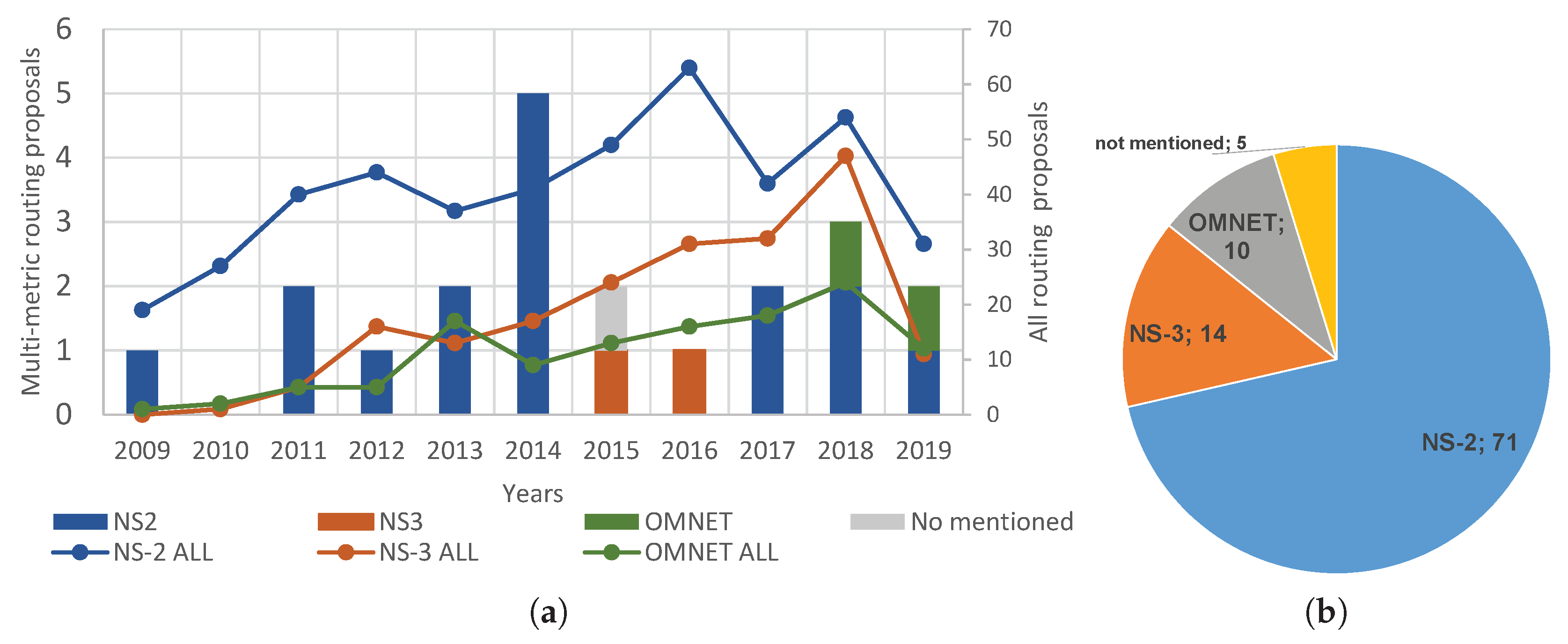{kind=link}
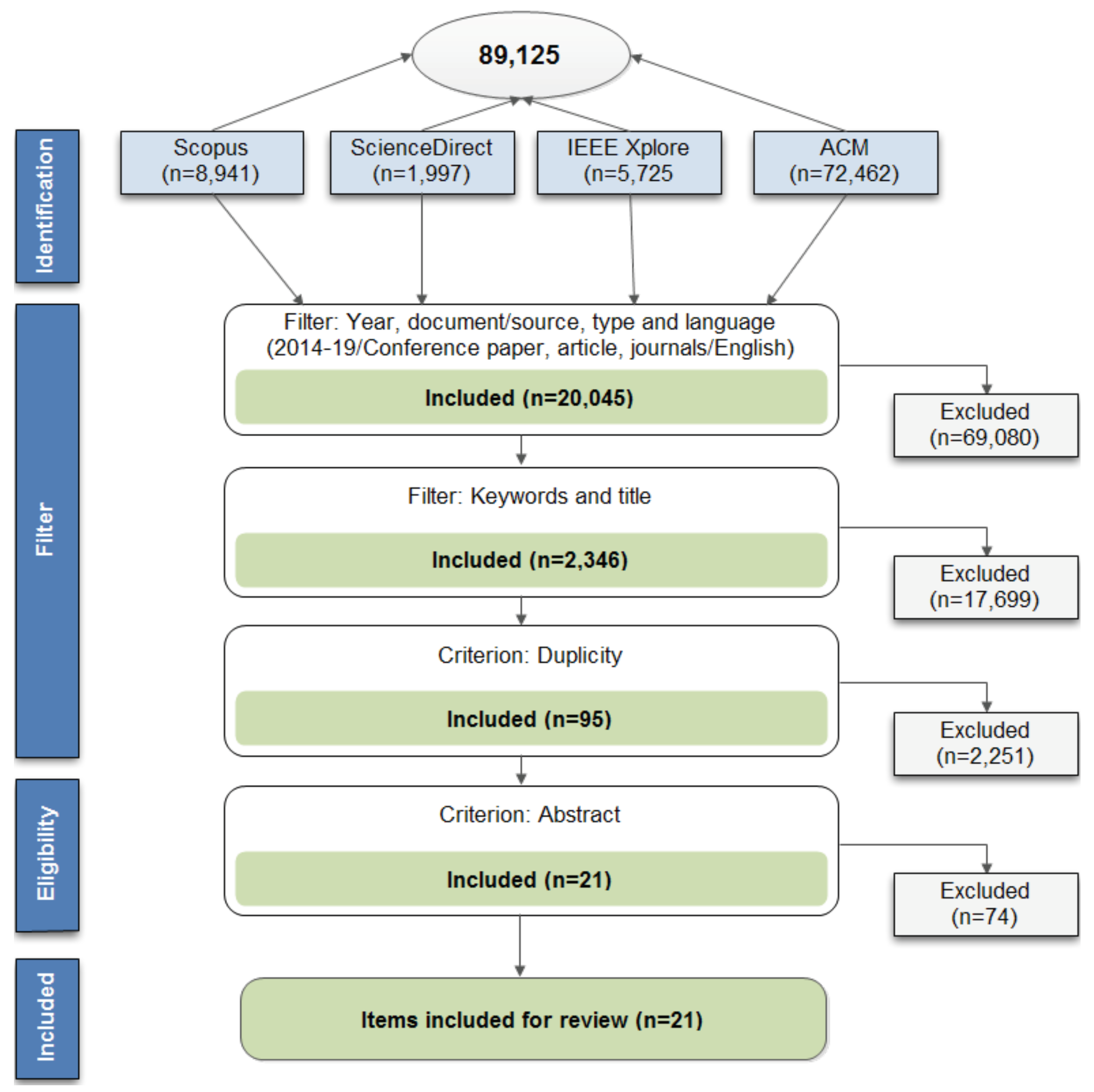{kind=link}
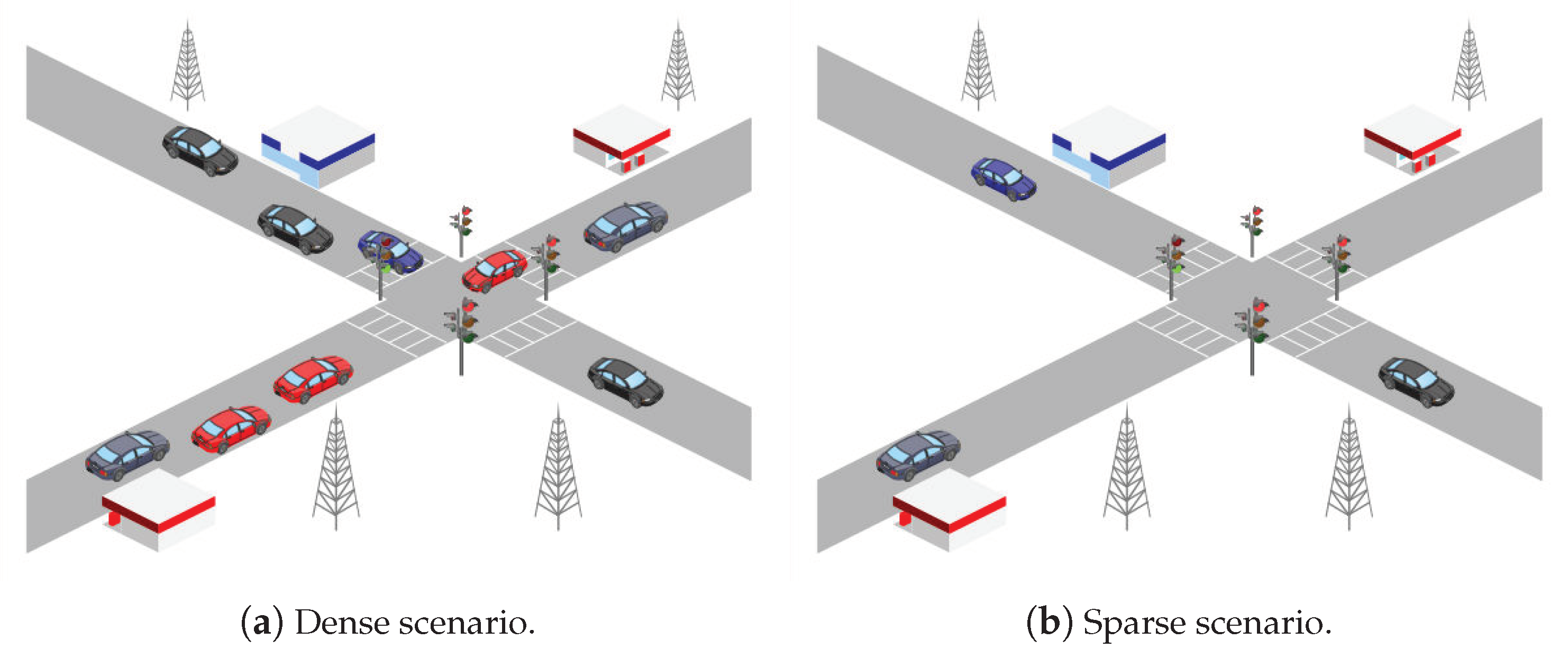{kind=link}
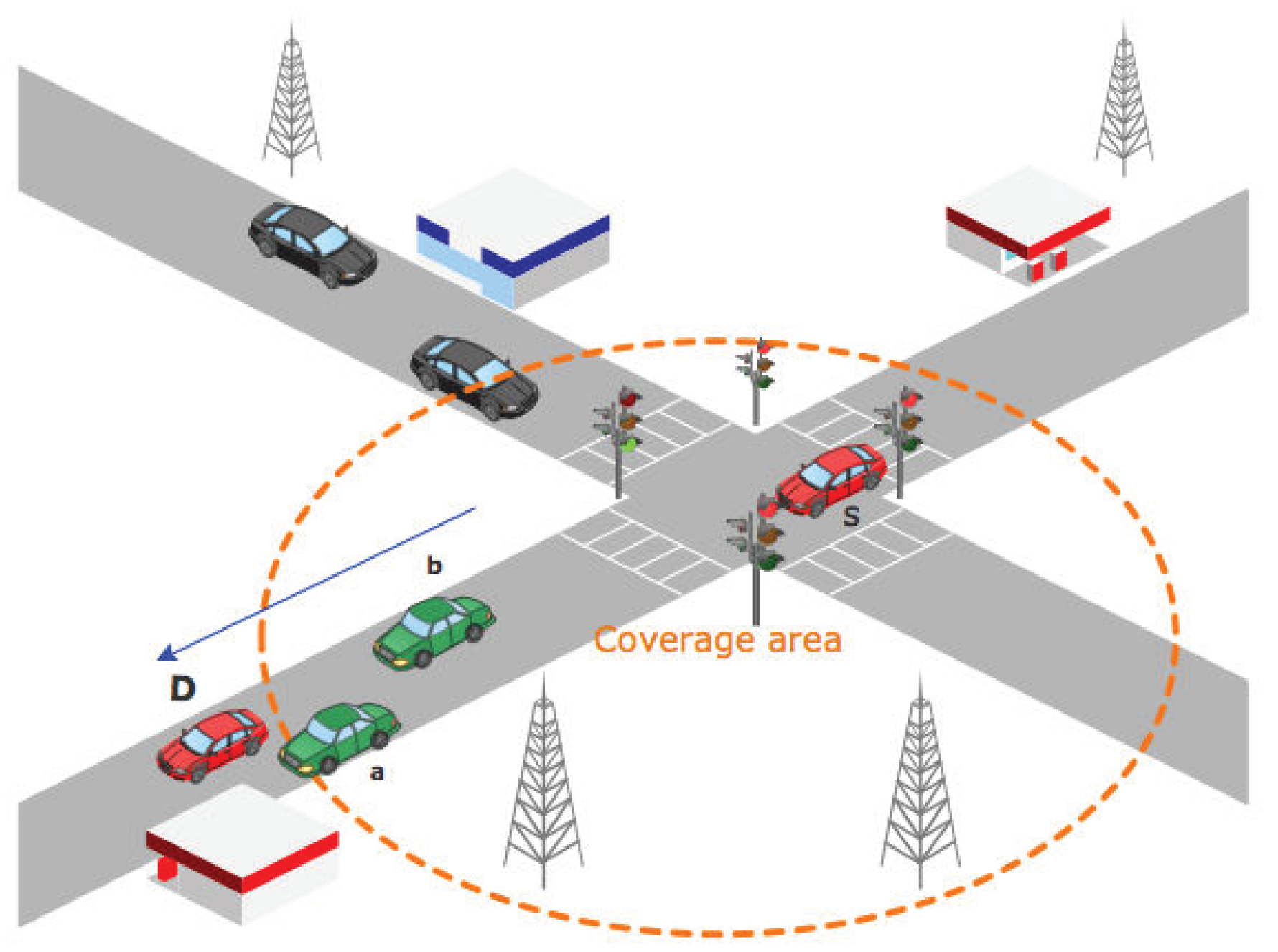{kind=link}
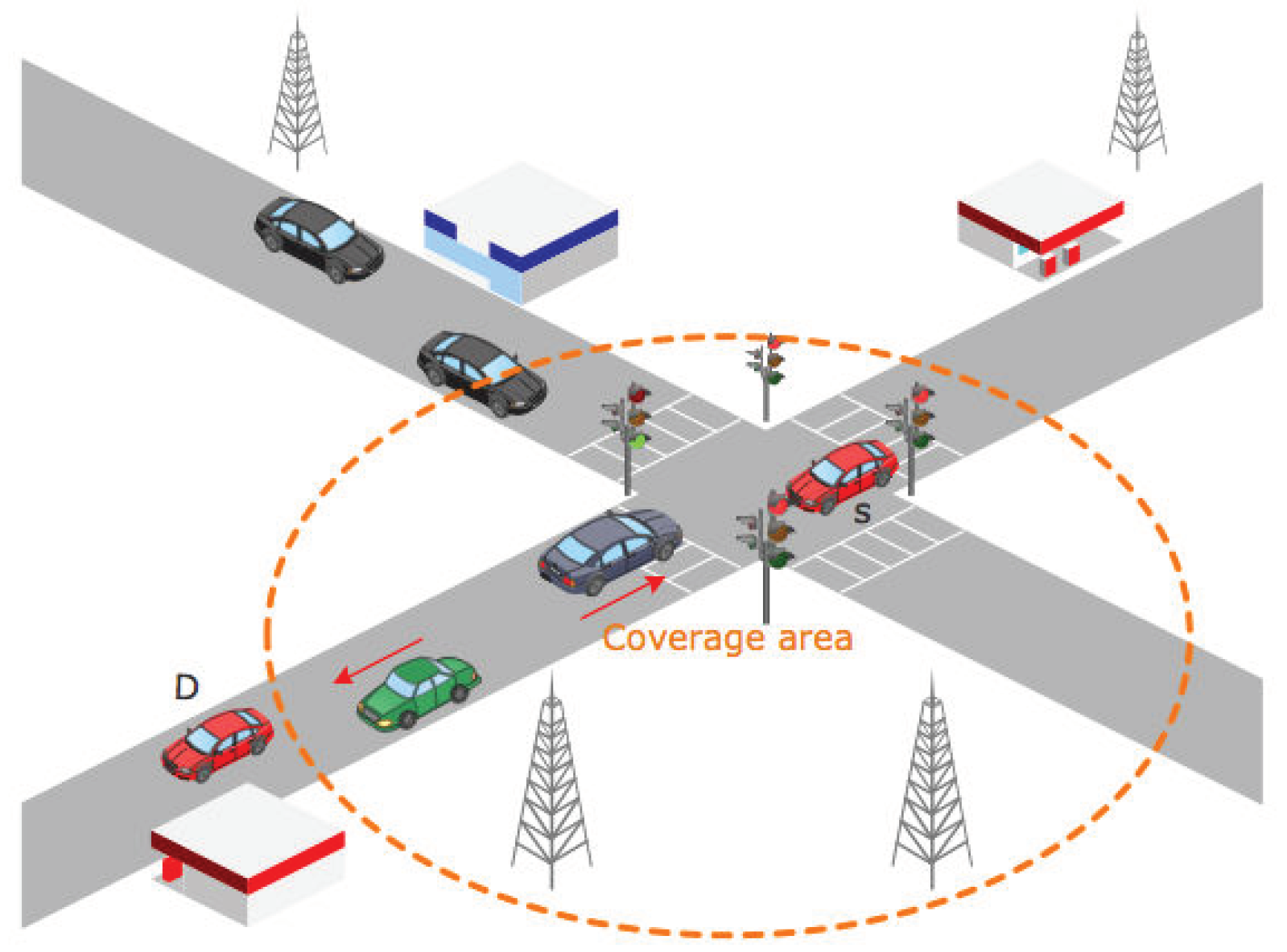{kind=link}
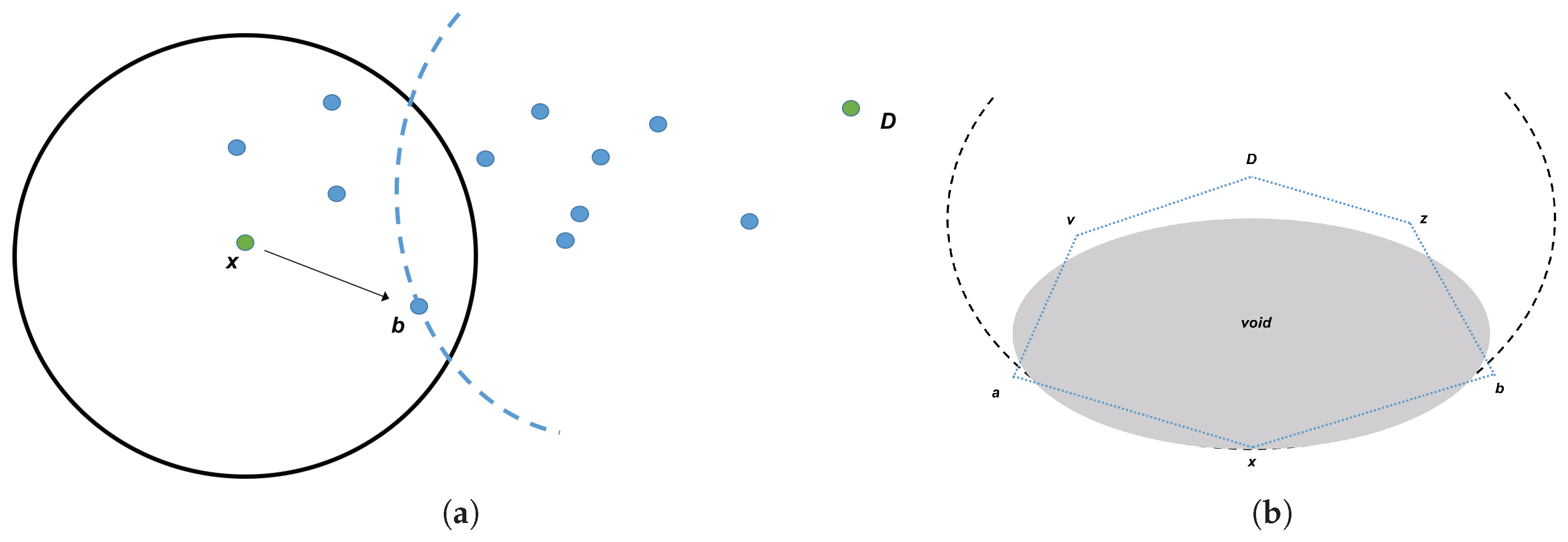{kind=link}
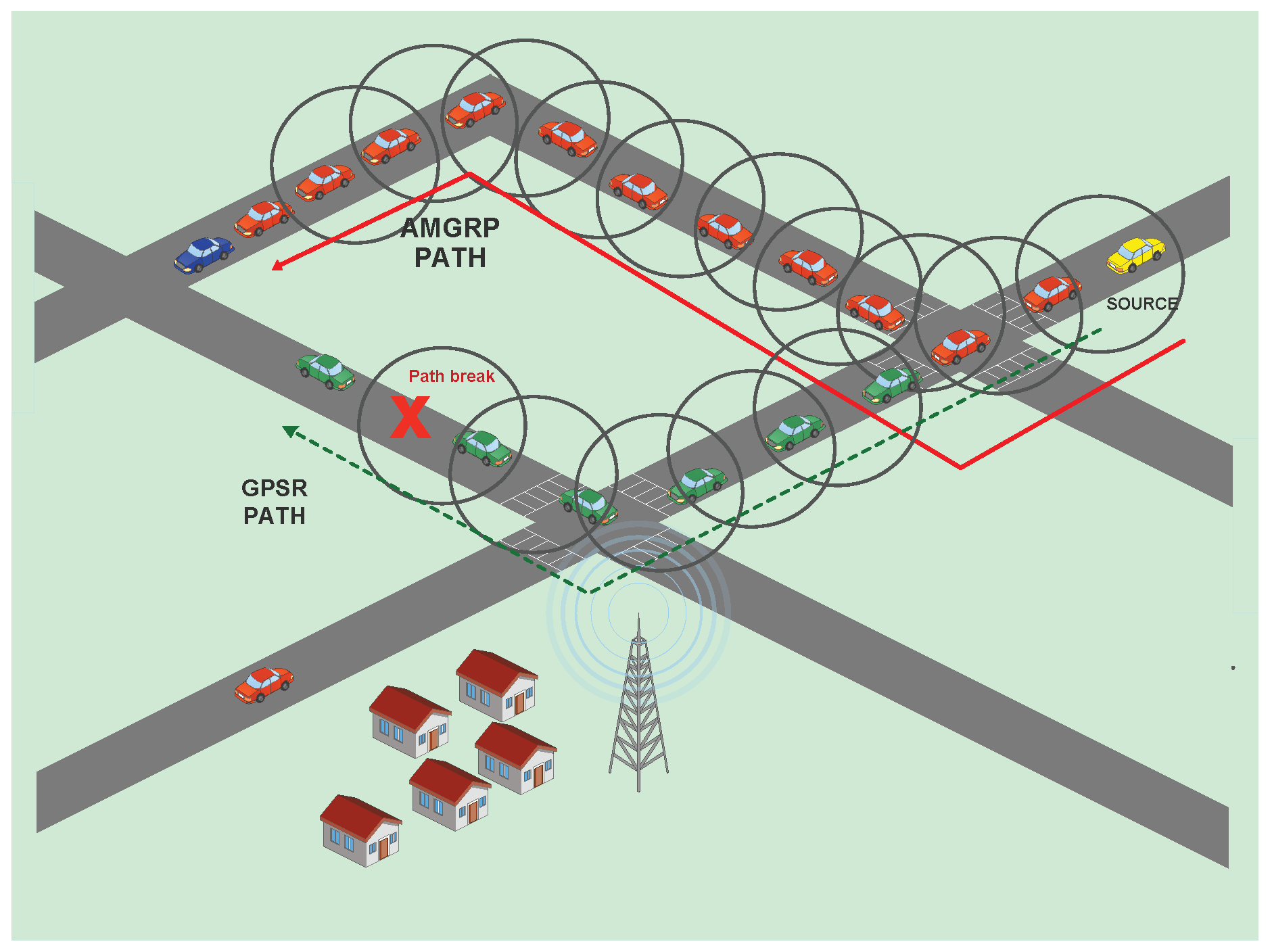{kind=link}
{kind=link}
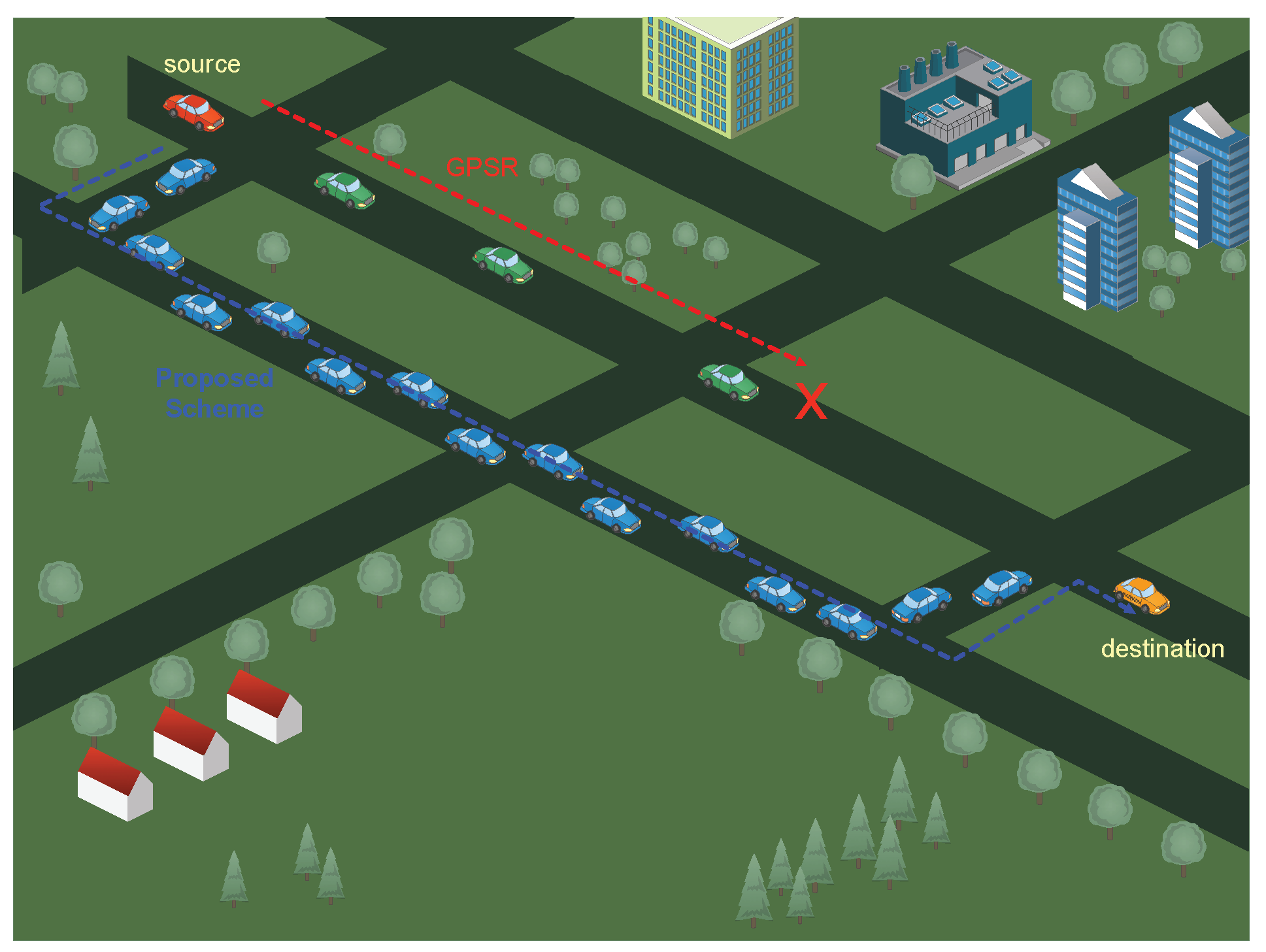{kind=link}
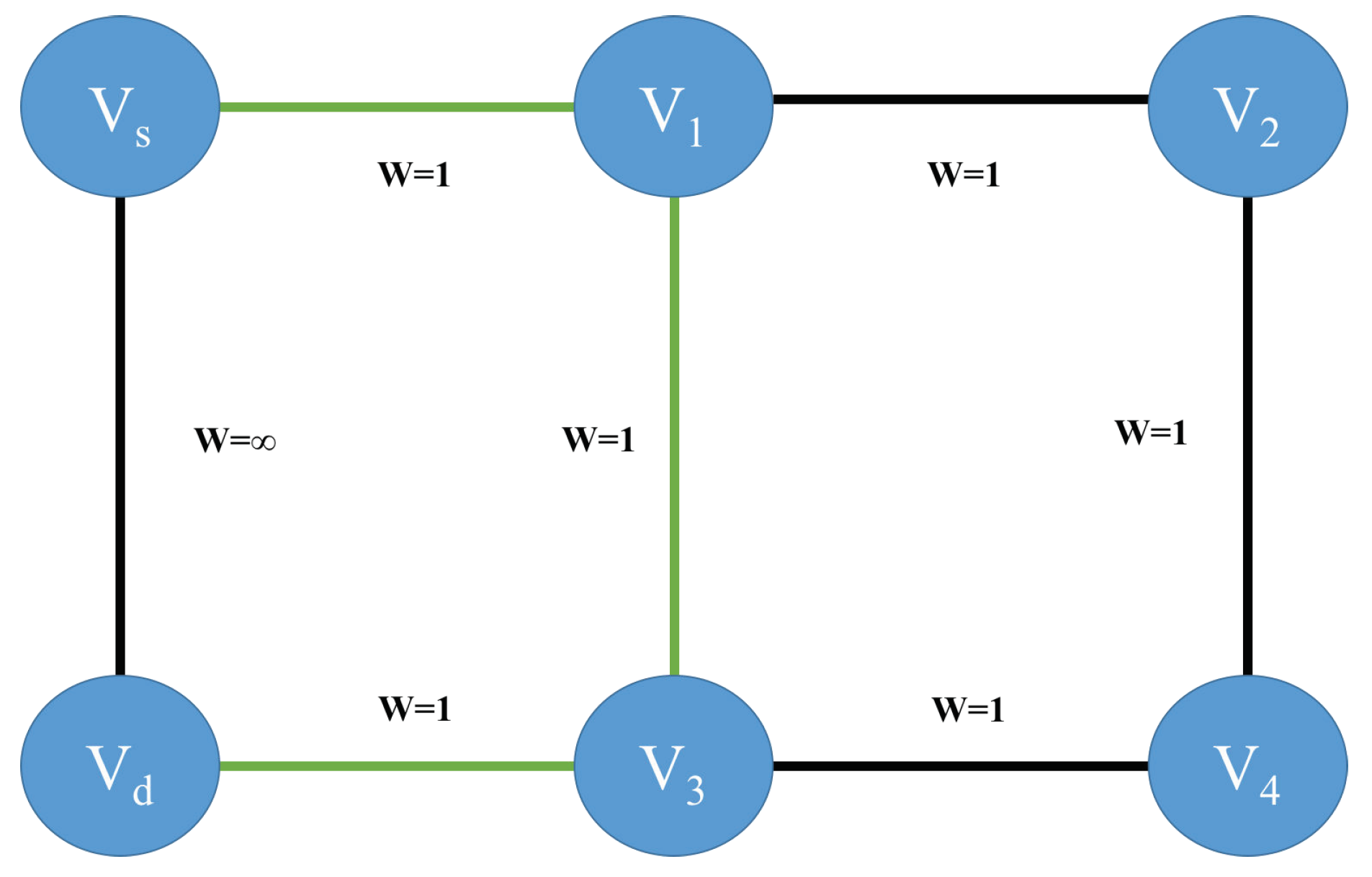{kind=link}
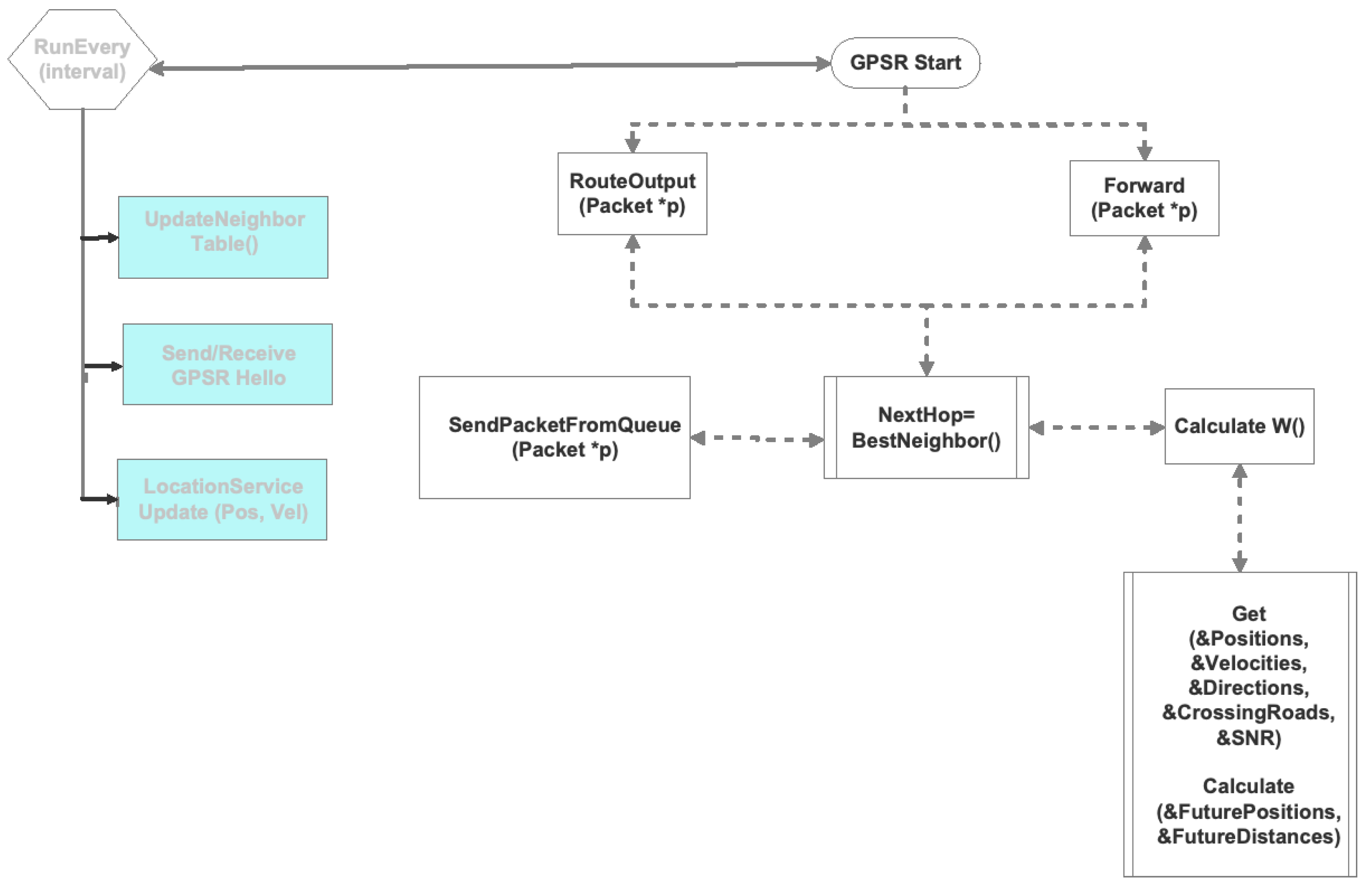{kind=link}
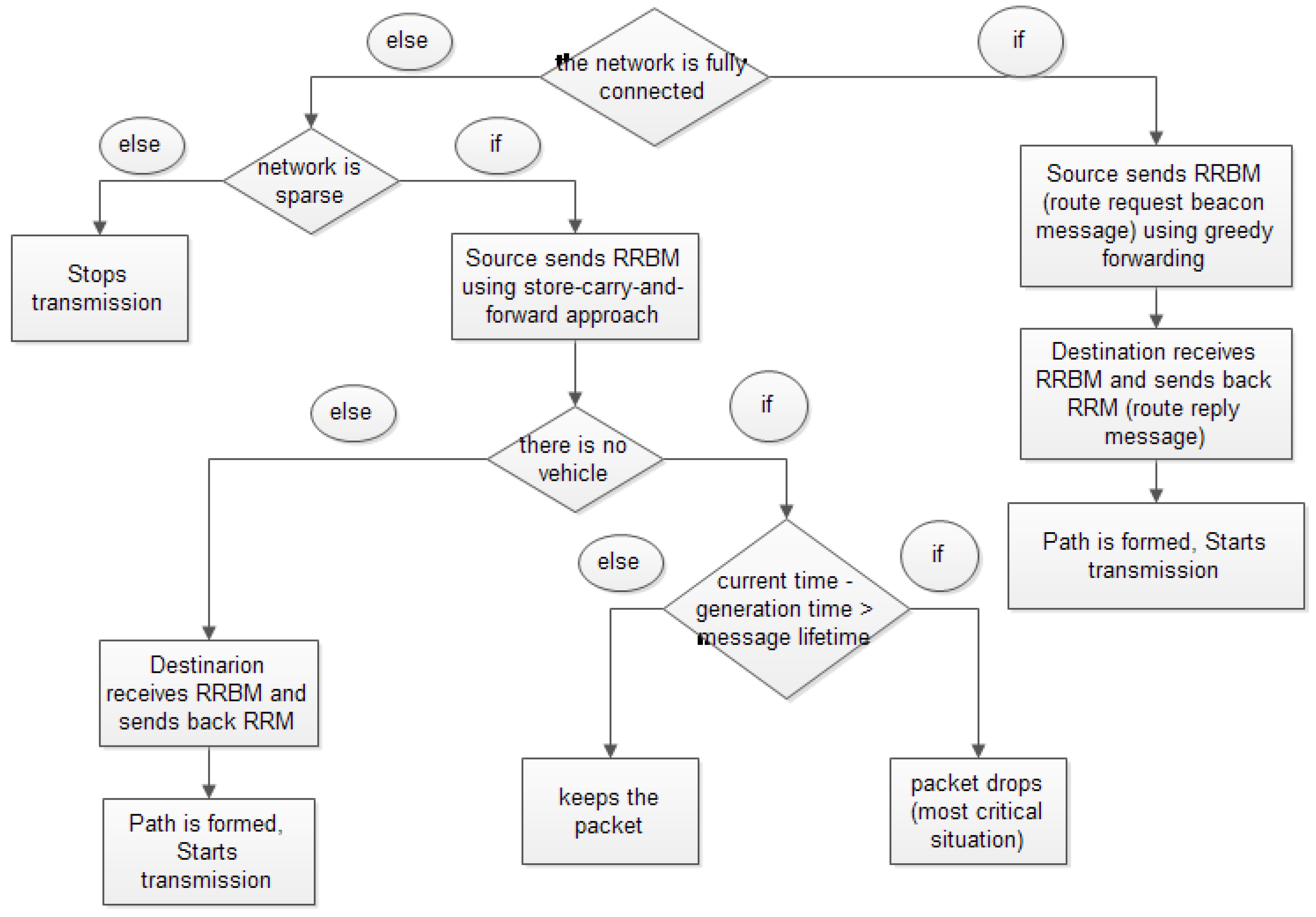{kind=link}
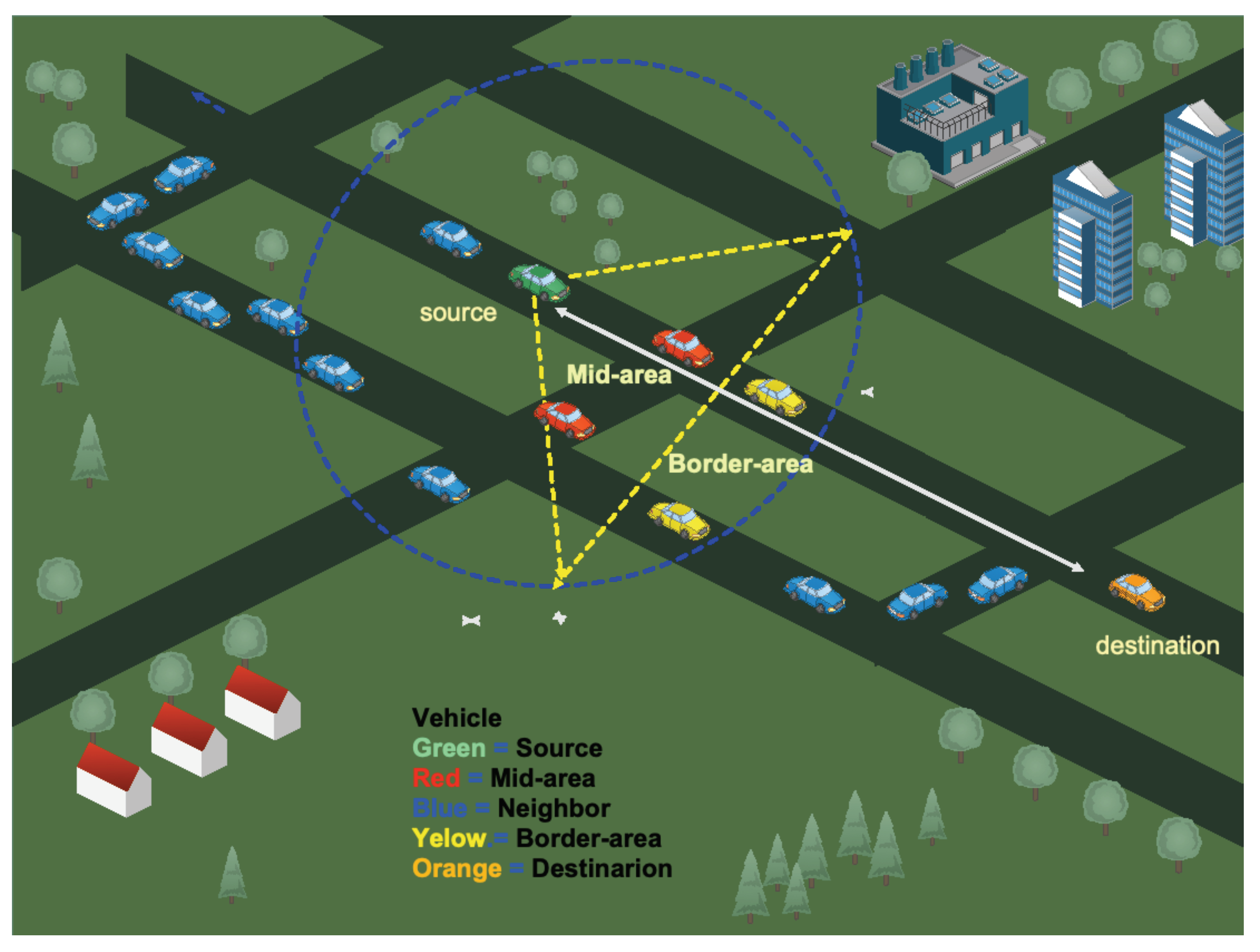{kind=link}
Table 1.
Research results using search string.
| Digital Libraries | IEEE | Scopus | ACM | ScienceDirect |
|---|---|---|---|---|
| routing protocol vanet | 1316 | 1598 | 34,411 | 1153 |
| metrics routing vanet | 223 | 273 | 18,407 | 4 |
| metrics routing protocol vanet | 204 | 231 | 28,592 | 761 |
| multi-metric routing protocol | 47 | 65 | 52,035 | 75 |
| multimetric routing protocol vanet | 7 | 1 | 18,206 | 4 |
Table 2.
Rresearch results using Boolean expressions.
| Digital Libraries | IEEE | Scopus | ACM | ScienceDirect |
|---|---|---|---|---|
| “routing” and “protocol” and “VANET” | 3874 | 7147 | 92 | 1153 |
| “multimetric” and “routing” and “protocol” and “VANET” | 19 | 51 | 7612 | 4 |
| “metrics” and “routing” and “protocol” and “VANET” | 1790 | 1365 | 28,592 | 761 |
| “multimetrics” and “routing” and “protocol" | 42 | 328 | 17,960 | 75 |
| “multimetric” and “routing” and “protocol” and “VANET” | 1 | 50 | 18,206 | 4 |
Table 3.
Relative ranking of criteria.
| Metric | Value |
|---|---|
| Mobility metric | 0.413846 |
| Node density | 0.256923 |
| Node status | 0.216923 |
| Link lifetime | 0.112308 |
Table 4.
Rule base for fuzzy-control-based ad hoc on-demand distance vector (AODV) routing (FCAR) protocol [40].
Table 4.
Rule base for fuzzy-control-based ad hoc on-demand distance vector (AODV) routing (FCAR) protocol [40].
| Route Lifetime (Input) | Percentage of Same-Directional Vehicles (Input) | Route Select Probability (Output) | |
|---|---|---|---|
| R1 | Short | Low | Weakest |
| R2 | Medium | Low | Weakest |
| R3 | Long | Low | Weak |
| R4 | Short | Medium | Weakest |
| R5 | Medium | Medium | Weak |
| R6 | Long | Medium | Normal |
| R7 | Short | High | Normal |
| R8 | Medium | High | Strong |
| R9 | Long | High | Strongest |
Table 5.
Multimetric routing protocols in a vehicular ad hoc network (VANET). Number of operations shown with each metric was approximated and based on number of neighbors n, which does not consider any other phase, such as protocol initialization or generation overhead.
Table 5.
Multimetric routing protocols in a vehicular ad hoc network (VANET). Number of operations shown with each metric was approximated and based on number of neighbors n, which does not consider any other phase, such as protocol initialization or generation overhead.
| Protocol | Year | Metrics Used | Area Evaluated | Carry and Forwarding | Simulators for Evaluation | Delay | % Delivery Ratio |
|---|---|---|---|---|---|---|---|
| AHP-based Multimetric Geographical Routing Protocol (AMGRP) [35] | 2019 | Link lifetime (), mobility (), node status (), and node density (n). Total () | Urban | no | OpenStreetMap (OSM) [49], SUMO [50], OMNET++ (INET) [51] | 0.35 s (250 nodes); 1 s (50 nodes) | 78% |
| AODV with predicting node trend (AODV-PNT) [36] | 2014 | Speed (), acceleration (), movement direction (), and link quality between vehicles (). Total () | Urban | no | SUMO [50], NS-2 [52] | 0.6 s (55 nodes) | 66% |
| AODV with multi-RREP (AODV-MR) [27] | 2014 | Link reliability, link stability and number of hops. | Urban | yes | SUMO [50], NS-2 [52] | 0.6 s (50 nodes) | 80% |
| Named Data VANET protocol (NVP) [37] | 2016 | Distance (TXC) (), number hops (n) and density (n). Total () | Urban | no | SUMO [50], NS-3 [53] | 2.04 s (500 nodes) | 78% |
| Multimetric Unicast Data Dissemination Scheme (MUDDS) [38] | 2012 | Link availability (n), distances () and Packets Reception Rate PRR (). Total () | Highway | no | NS-2 [52] | 0.15 s (10–100 nodes) | - |
| Multimetric Opportunistic Routing (MMOR) [39] | 2011 | Distance (), moving direction (), velocity (), load () and neighbors’ density (). Total () | Urban | no | NS-2 [52] | - | - |
| Multimedia Multimetric Map-aware Routing Protocol (3MRP) [10] | 2017 | Distance (), density (n), trajectory (), available bandwidth estimation (ABE) () and MAC layer losses (n). Total () | Urban | yes (local buffer) | OSM [49], SUMO C4R [50], RevSim [54], NS-2 [52] | 1.4 s (50 nodes); 1 s (100 nodes) | 40% (50 nodes); 29% (100 nodes) |
| Multimetric next-hop vehicle selection for geocasting in vehicular ad-hoc networks [41] | 2015 | Link delay (), jitter (), link lifetime (), velocity () and degree (). Total () | Urban | no | - | - | - |
| Fuzzy control based AODV routing (FCAR) [40] | 2009 | Route lifetime () and direction (). Total () | Urban | no | SUMO [50], MOVE [55], NS-2 [52] | 0.17 s (50 nodes); 0.21 (250 nodes) | - |
| Reactive routing protocol for VANETs (RRPV) [12] | 2014 | Number of hops (n), link reliability () and co-channel noise (). Total () | Urban | no | SUMO [50], NS-2 [52] | 1 s (50 nodes) | - |
| VANET Routing based on real-time road vehicle density [30] | 2013 | Position (n), direction (n) and density (). Total () | Urban | no | NS-2 [52] | - | 35% |
| Pheromone-based vehicle to vehicle (PBV2V) routing [25] | 2013 | Position () and pheromone density (). Total () | Urban | no | MOVE [55], NS-2 [52] | - | - |
| Speed based on demand vector link routing protocol (SODV) [43] | 2017 | Velocity () and number of hops (n). Total () | Urban | no | VanetMobiSim [56], NS-2 [52] | 0.3 s (40 nodes) | 26% (40 nodes) |
| Adaptive geographical routing based on Quality of transmission for urban vehicular networks (AGQOT) [42] | 2018 | Distance () and link connection time (). Total ()k number of intervals to approximate an integral | Urban | yes | VanetMobiSim [56], NS-2 [52] | 1 s (100 nodes); 0.05 s (140 nodes) | 25% (100 nodes); 34% (140 nodes) |
| Greedy curvemetric routing protocol (GCRP) [31] | 2018 | Position (n), velocity (n), direction (n) and curvemetric distance (). Total ()k number of vehicles in the forward path | Urban | yes | SUMO [50], OMNET [51] | 1 s (100 nodes); 0.05 s (140 nodes) | 25% (100 nodes); 34% (140 nodes) |
| Reliable intervehicular routing (RIVER) [11] | 2011 | Hops (n) and reliability (n). Total () | Urban | no | NS-2 [52] | - | - |
| GPRS-modified (GPRS-M) [44] | 2015 | Distance, speed, direction for future position () and link quality (). Total () | Urban and highway | no | JOSM [57], SUMO [50], Bonmotion [58], NS-3 [53] | 0.02 s (100 nodes) | 79% |
| Anchor-based connectivity-aware routing (ACAR) [45] | 2014 | Position (), direction () and density (n). Total () | Urban | yes | NS-2 [52,52] | 0.04 s (100 nodes); 0.02 s (400 nodes) | 50% (100 nodes); 100% (400 nodes) |
| Maxduration- Minangle GPSR (MM-GPSR) [46] | 2018 | Maximum cumulative communication duration () and minimum angle (). Total () | Urban | no | VanetMobiSim [56], NS-2 [52] | - | - |
| Connectivity-aware intersection-based routing (CAIR) [47] | 2014 | Position (), speed (n) and density (n). Total () | Urban | no | VanetMobiSim [56], IDM-LC, Matlab [59], NS-2 [52] | 0.75 s (80 nodes) | 70% (80 nodes) |
| Distance and signal quality routing (DSQR) [48] | 2019 | Link quality estimation (), and distance (). Total () | Urban and highway | yes | NS-2 [52], MOVE [55] | 0.0031 s (100 nodes) (500 nodes) | 65% (100 nodes); 60% (500 nodes) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Tripp-Barba, C.; Zaldívar-Colado, A.; Urquiza-Aguiar, L.; Aguilar-Calderón, J.A. Survey on Routing Protocols for Vehicular Ad Hoc Networks Based on Multimetrics. Electronics 2019, 8, 1177. https://doi.org/10.3390/electronics8101177
AMA Style
Tripp-Barba C, Zaldívar-Colado A, Urquiza-Aguiar L, Aguilar-Calderón JA. Survey on Routing Protocols for Vehicular Ad Hoc Networks Based on Multimetrics. Electronics. 2019; 8(10):1177. https://doi.org/10.3390/electronics8101177
Chicago/Turabian StyleTripp-Barba, Carolina, Aníbal Zaldívar-Colado, Luis Urquiza-Aguiar, and José Alfonso Aguilar-Calderón. 2019. "Survey on Routing Protocols for Vehicular Ad Hoc Networks Based on Multimetrics" Electronics 8, no. 10: 1177. https://doi.org/10.3390/electronics8101177
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.