Improved Krill Herd Algorithm with Novel Constraint Handling Method for Solving Optimal Power Flow Problems

1
Key Laboratory of Network Control & Intelligent Instrument, Chongqing University of Posts and Telecommunications, Ministry of Education, Chongqing 400065, China
2
Research Center on Complex Power System Analysis and Control, Chongqing University of Posts and Telecommunications, Chongqing 400065, China
3
Key Laboratory of Communication Network and Testing Technology, Chongqing University of Posts and Telecommunications, Chongqing 400065, China
*
Author to whom correspondence should be addressed.
Energies 2018, 11(1), 76; https://doi.org/10.3390/en11010076
Submission received: 17 October 2017
/
Revised: 6 December 2017
/
Accepted: 22 December 2017
/
Published: 1 January 2018
(This article belongs to the Section F: Electrical Engineering)
Abstract
:As one of the most important tools used in operation and planning of power systems, the optimal power flow (OPF) problem considering the economy and security is large-scale, complex and hard to solve. In this paper, an improved krill herd algorithm (IKHA) has been proposed. In IKHA, the onlooker search mechanism is introduced to reduce the probability of falling into local optimum; and the parameter values of the proposed algorithm including inertia weight and step-length scale factor are varied according to the iteration of evolutionary process, which improves the exploration and exploitation capabilities. Moreover, a novel constraint handling method is proposed to guide the individual to the feasible space and ensure that the optimal solution satisfies the security constraints. Then, IKHA is combined with the novel constraint handling method to solve the multi-constrained OPF problem, and its performance is tested on the IEEE 30 bus, IEEE 57 bus and IEEE 118 bus systems for 10 different simulation cases containing linear and non-linear objective functions. The simulation results demonstrate that the proposed method can solve the OPF problem successfully and obtain better solutions compared with other methods reported in the recent literatures, which prove the feasibility and effectiveness of the improvements in this work.
1. Introduction
Electricity is the main driving force of national economies and life, so it is particularly important to improve the properties of power systems, such as the safety, the reliability and the economy. Today’s electric power system is a changeable and sophisticated system due to its large scale and complicated components, including the power generation, the substations, the transmission, the power distribution and the consumption of electricity [1]. The whole society, even the whole world, should attach importance to the operation and planning of energy systems for realizing safe, reliable power system economic operation.
The optimal power flow (OPF) problem considering the economy and security is one of the most important tools used in operation and planning for energy systems [2]. The aim of OPF is to provide the optimal settings of control variables for optimizing a specific objective function, such as the generation cost function, transmission real power losses and voltage deviation, while satisfying some equality and inequality constraints. The equality constraints are power flow equations, and the inequality constraints include many limits on power system variables and operating constrains.
Initially, some traditional mathematical methods have been used to solve OPF problem, such as interior-point method [3], linear programming method [4], nonlinear programming method [5] and simplified gradient method [6]. Usually, these methods have fast calculation speed and good convergence characteristics with some restrictions on variables and objective functions. The restrictions refer to convexity, smoothness, continuity and differentiability. In fact, OPF is a large-scale, multi-constrained, non-linear and non-convex problem which contains the discrete and continuous variables. Therefore, to a certain extent, the traditional methods cannot solve the OPF problem successfully. With the development of computers, the intelligent optimization methods based on the combination of computer technology and biological simulation are proposed to overcome many drawbacks of the traditional methods; and these heuristic algorithms include artificial bee colony algorithm (ABC) [7], particle swarm optimization (PSO) [8], differential search algorithm (DSA) [9], differential evolution algorithm (DE) [10], gravitational search algorithm (GSA) [11], etc. Numerous studies indicate that each algorithm has different performance, pros and cons in different cases, so there are more and more modified methods based on intelligent algorithms to solve the OPF problem effectively. For example, the authors in [12] proposed an improved colliding bodies optimization algorithm (ICBO) which considered three mechanisms in parallel-based colliding bodies optimization (CBO), and the proposed ICBO has been proved to yield better optimization efficacy over CBO. In [9], an efficient inspired search method based on differential search algorithm (DSA) could provide better results compared with DSA for handling OPF problem. A particle swarm optimization with an aging leader and challengers (ALC-PSO) was successfully applied for the solution of OPF problem in [13]. Applications of modified methods seem like a good way to solve the OPF problem. However, it is still not an easy task to guarantee the optimal results obtained by these methods meet security constraints in larger systems. Thus, for solving OPF problem, it is greatly significant to improve the current methods and handle constraints on variables well simultaneously. Actually, in order to more efficiently contribute to the power system engineering, the academia contribution should consider the requirements of the overall OPF solution methodology as much as possible [14].
In 2012, Gandomi and Alavi proposed a new bio-inspired intelligent optimization method according to the simulation of Antarctic krill swarms’ living environment and habits, named as krill herd algorithm (KHA) [15]. This method has a strong ability of diversity and few parameters for adjustment, which is suitable for engineering optimization. However, the search precision and convergence speed of KHA can’t be guaranteed due to excessive dependence on random steps, which is easy to fall into local optimal. So far, many modified krill herd algorithms have been proposed to overcome the shortcomings. In [16], Logistic map was considered in chaotic krill herd algorithm (CKHA) to improve the performance of the basic KHA, and the proposed method yielded better optimization efficacy over some other recent popular techniques. The authors in [17] made certain modifications to increase the performance of the standard KHA, and the simulation results of the proposed method (MKHA) considerably outperformed the results obtained in the cited literature. The opposition based learning (OBL) concept was integrated with krill herd algorithm (KHA) for improving the convergence speed and simulation results in [18]. In [19], the proposed approach utilizes opposition-based learning (OBL), position clamping (PC) and Cauchy mutation (CM) to enhance the performance of basic KH. In nature, the survival of the individual is often influenced by the outside world, such as weather, food and natural enemies. Therefore, the individual should be renewed again with a certain probability. For example, in the cuckoo search algorithm, cuckoo birds re-establish new nests according to the probability that the eggs of cuckoo birds are found by other birds [20]. So far, there is no improved algorithm based on KHA that considers the impact of the external environment. In this paper, onlooker search mechanism, which is based on the behavior of onlooker bees of artificial bee colony (ABC) algorithm [21], is proposed to simulate the external factors. A certain number of bees will interfere with the evolution of krill individuals according to a probability value. Furthermore, the improvement of parameters is also considered in the proposed method.
As to the problem of constraints, in many literatures, evolutionary algorithms choose the penalty function method to handle the inequality constraints of dependent variables [12,22,23,24]. However, the method requires many penalty factors, and the setting and adjustment of these parameters may increase the complexity of the algorithm. Besides, in larger systems, the penalty function does not necessarily lead the algorithm to obtain a solution that satisfies the security constraints. Therefore, a novel constraint handling method is proposed to overcome the drawbacks. For state variables constraints, the constraint evaluation value Constraint(Xi) considered as the conditions of selecting optimal individual has fewer parameters to set and adjusted in larger system, and the non-greedy selection is aimed to guide the individual to the feasible space. The constraint method also presents a new mechanism for self-constrained control variables, which makes the variable closer to the optimal direction. Briefly, the contributions of this paper can be summarized as follows:
- An improved krill herd algorithm is proposed, namely IKHA, which introduces the onlooker search mechanism to reduce the probability of falling into local optimum. Moreover, the parameter values of the proposed algorithm including inertia weight ω and step-length scale factor Ct are varied according to the iteration of evolutionary process.
- A novel constraint handling method, which contains two parts of control variable constraint and state variable constraint, is proposed to guide the individual to the feasible space and ensure the optimal solutions satisfy the security constraints, especially in larger systems.
- The OPF problem is successfully implemented on standard IEEE 30 bus, IEEE 57 bus and IEEE 118 bus systems to solve 10 different cases by using the proposed method.
Finally, the KHA and IKHA are tested on standard IEEE 30 bus, IEEE 57 bus and IEEE 118 bus systems; and different objective functions, such as quadratic fuel cost, voltage magnitude deviation, fuel cost emission and quadratic fuel cost considering voltage magnitude deviation, are considered to verify the efficiency of IKHA for solving OPF problem. The simulation results demonstrate that IKHA can solve the OPF problem successfully and obtain better solutions compared with KHA and other methods reported in the recent literatures.
The rest of the paper is organized as follows: Section 2 describes the mathematical formulation of the OPF problem. Section 3 proposes an improved krill herd algorithm. Section 4 introduces a novel constraint method. Section 5 presents simulation cases and results. Finally, the conclusion is drawn in Section 6.
2. OPF Problem Formulation
As previously mentioned, the OPF problem can be mathematically formulated as follows:
Subject to:
where x and u are the vector of state variables and the vector of control variables, respectively. F(x, u) is the objective function to be minimized. g(x, u) is the set of equality constraints and h(x, u) is the set of inequality constraints. In actual operation of power systems, there are many types of objective function which is non-linear, non-convex or non-differential.
2.1. Control Variable
The control variables of this model include active power generation PG at PV buses except the slack bus, voltage magnitude VG at PV buses, transformer tap settings T and shunt reactive compensation QC, which can be expressed as:
where NG, NT and NC represent the number of generator buses, the number of regulating transformers and the number of shunt compensators, respectively. Commonly, the transformer tap settings T and shunt reactive compensation QC have been considered as discrete variables.
2.2. State Variable
The state variables of this model are active power generation PG1 at the slack bus, voltage magnitude VL at PQ buses, reactive power output QG at PV buses and transmission line loadings (or line flow) Sl, which can be represented as:
where NL is the number of load buses and NTL is the number of transmission lines; PG1 as the state variable is the active power generation at the slack bus.
2.3. Equality Constraint
The power balance are considered as basic equality constraints and reflect the physics of power systems, which are defined as follows:
where δij = δi − δj, which are voltage angles at bus i and j, respectively. Ni is the number of buses which are adjacent to bus i, including bus i. NPQ is the number of PQ buses and NS is the number of system buses excluding slack bus. QGi and PGi represent the reactive power output and the active power generation at bus i which belongs PV buses, respectively. QLi and PLi represent the reactive load demand and active load demand at bus i, respectively. Gij and Bij are the conductance and susceptance between bus i and bus j, respectively. Vi is the voltage magnitude at bus i. It is noted that the equality constraints are satisfied because they are considered as the termination conditions when calculating Jacobian matrix in Newton Raphson load flow calculation [11].
2.4. Inequality Constraint
The operating limits of power systems are considered as inequality constraints which guarantee the system security.
- Generator constraints:
- Transformer constraints:
- Shunt reactive compensator constraints:
- Security constraints:
3. Improved Krill Herd Algorithm (IKHA)
3.1. Brief on Krill Herd Algorithm (KHA)
As one of the marine species studied by humans, krill swarms have a habit of clustering. When krill swarms encounter natural enemies, some of them will be killed or forced to change the position, resulting in a decrease in population density. In order to restore the original state, krill swarms will be gathered towards two main goals: increasing population density and finding food. Based on the two behaviors in the process of krill clustering, some scholars have proposed a new heuristic algorithm to solve the global optimal problem—krill herd algorithm (KHA).
In KHA, each krill individual represents a feasible solution for the optimization problem. The above two goals are considered as forward direction of the optimization problem, then the process of individual re-aggregation of krill is the process of the algorithm to search for the optimal solution. The location of each krill will change over time and its changes are mainly affected by the following three factors:
- Movement induced by other krill individuals
- Foraging motion
- Random diffusion
For an n dimensional decision problem, the Lagrangian model is used in KHA:
where Ni is the induced motion of other krill individuals; Fi is the Foraging activity and Di is the physical diffusion.
3.1.1. Movement Induced by Other Krill Individuals
In order to achieve the overall migration of the population, each krill individual will interact with each other, making the population remain highly intensive. The direction αi of movement is influenced by the effects of neighboring individuals (local effect), the optimal individual (target effect), and population exclusion (repulsive effect). For a krill, the movement Ni induced by other krill individuals can be defined as:
where Nmax and Niold are the maximum induced speed and the last motion induced, respectively. ωn ∈ [0, 1] is the inertia weight of the motion. αilocal and αitarget represent the local effect and target effect, respectively. The local effect induced by neighbors can be assumed as an attractive/repulsive tendency and determined as follows:
where NN is the number of neighbors, X and K represent the related position and fitness, respectively. Kworst and Kbest are the worst and the best value of the krill herds so far; ε is a small positive value to avoid singularities. Furthermore, the sensing distance of krill individuals should be proposed to define the local effect, which determines the neighbors of a krill individual using the following formula:
where NP represents the population size.
The global optimal solution as target direction will affect the motion of each krill which is defined as:
where rand1 is uniformly distributed random variable between 0 and 1, g and gmax represent the actual iteration and the maximum iteration numbers.
3.1.2. Foraging Motion
In the foraging motion, the “food” searched by the population is estimated according to the fitness distribution of the krill individuals, and its position is determined by the definition of “center of mass” in physics:
The foraging activity of the krill is affected by two main factors: the current and the previous location of the food source which can be expressed as follows:
where Vf is the foraging speed, ωf is the inertia weight between 0 and 1, Fiold is the previous foraging motion, βifood and βiibest represent the food attraction and the effect of the best fitness of the ith krill so far which are defined as:
where Cfood is the food coefficient and varied by the iteration as:
where rand2 is uniformly distributed random variable between 0 and 1.
3.1.3. Random Diffusion
The physical diffusion of krill individuals can be expressed with the maximum diffusion speed and a random directional vector as:
where Dmax represents the maximum diffusion speed and δ is random vector whose arrays are random values generated according to uniform distribution between −1 and 1.
3.1.4. Position Update
The above three factors will make each krill individual change its position in the optimal direction. The position of the individual during the interval t + ∆t is updated as follows:
∆t is one of the most important constants and completely depends on the search space which can be expressed as:
where Ct is a constant number between [0, 2], NV is the total number of control variables, UBj and LBj represent the upper and lower bounds of the jth variable, respectively.
3.1.5. Genetic Operators
The crossover and mutation strategies of Genetic algorithm are incorporated into KH to improve the performance of the algorithm. The crossover is formulated as [15]:
where D is the dimension of the optimal problem, rand3 is uniformly distributed random variable between 0 and 1, Xr1 (r1 ≠ i) is randomly chosen from the current population, CR is the crossover probability which is equal to zero for the global best solution. The mutation is defined as [15]:
where Xbest is the global best position of the whole swarm, μ ∈ [0, 1] is the mutant factor, rand4 is uniformly distributed random variable between 0 and 1, Xr2 and Xr3 (r2 ≠ r3 ≠ i) are randomly chosen from the current population, Mu is the mutant probability which is also equal to zero for the global best solution.
3.1.6. The Process of Krill Herd Algorithm
Generally, the KHA can be described by the following steps:
- Step 1:
- Initialization: The algorithm parameters, the power system data, limits of variables.
- Step 2:
- The generation of initial population: The individual is randomly generated in the search space of the optimization problem. Random values are assigned to each D-dimensional individual according to:where Xj,min and Xj,max represent the lower and upper bounds of the jth decision variable, NP is the population size, rand5 is uniformly distributed random variable between 0 and 1.
- Step 3:
- Fitness evaluation: Evaluate each krill individual according to its position and memorise the global best solution.
- Step 4:
- Motion calculation:
- Movement induced by other krill individuals
- Foraging motion
- Random diffusion
- Step 5:
- Perform the genetic operators including crossover and mutation.
- Step 6:
- Update the population and repeat the Step 3.
- Step 7:
- Stop and display the final solution if the stop criteria is reached, else go back to Step 4.
3.2. Onlooker Search Mechanism
The above three factors will make each krill individual to change the direction of own position according krill swarms. In the evolutionary process, the difference among individuals will gradually decrease as the number of iterations increases, which makes KHA is prone to fall into local optimum. Therefore, the onlooker search mechanism based on the behavior of onlooker bees of artificial bee colony (ABC) algorithm [21] is introduced to overcome this shortcoming. All onlookers select individuals to be updated again according to the probability (Pi) value which is based on the roulette method [25]:
where i ∈ {1, 2, …, NP}, NP represents the number of the population size. fiti is associated with the fitness value fi of the ith krill calculated as follows:
The individual with better fitness will attract more onlooker bees and be updated by the following formula:
where Xr1,g and Xr2,g (r1 ≠ r2 ≠ i) are randomly chosen from the current population, Xbest is the global best position of the whole swarm, rand1 is uniformly distributed random variable between 0 and 1. Then the selection combined with novel constraint method is utilized to choose a better vector between the trial vector X″i and the target vector Xi which is explained in detail in Section 4. Moreover, the number of onlooker bees influences the convergence speed and it is usually to be 1/3 of the number of the population size.
3.3. Parameter Improvement
Generally, ωn and ωf are defined as ω called inertia weight. When ω takes bigger value, the algorithm can perform better globally and diversify the solution. Smaller ω is aimed to perform the local search. An excellent algorithm should have the two capabilities: exploration and exploitation. The former is the ability to avoid the possibility of finding the global optimal solution quickly by falling into local minimum. The latter refers to the ability to explore potential better solutions near the existing optimal value. Ct is step-length scale factor. The larger the value of Ct is, the stronger the exploration capability will be, which may lead to slower convergence. On the contrary, the exploitation capability will be stronger, which may lead to premature convergence. Therefore, the improvement of the parameters should be implemented, which directly affects the search precision and convergence speed.
In the proposed method, inertia weight ω is gradually decreased as:
where g and gmax represent the number of the iteration and maximum iteration number, respectively. The way of non-linear decline is to ensure that the motion can get a greater range of exploration in the early and accelerate the convergence of particles in the later.
The step-length scale factor Ct is changed according to the number of iterations of the algorithm:
3.4. Implementation of IKHA Algorithm
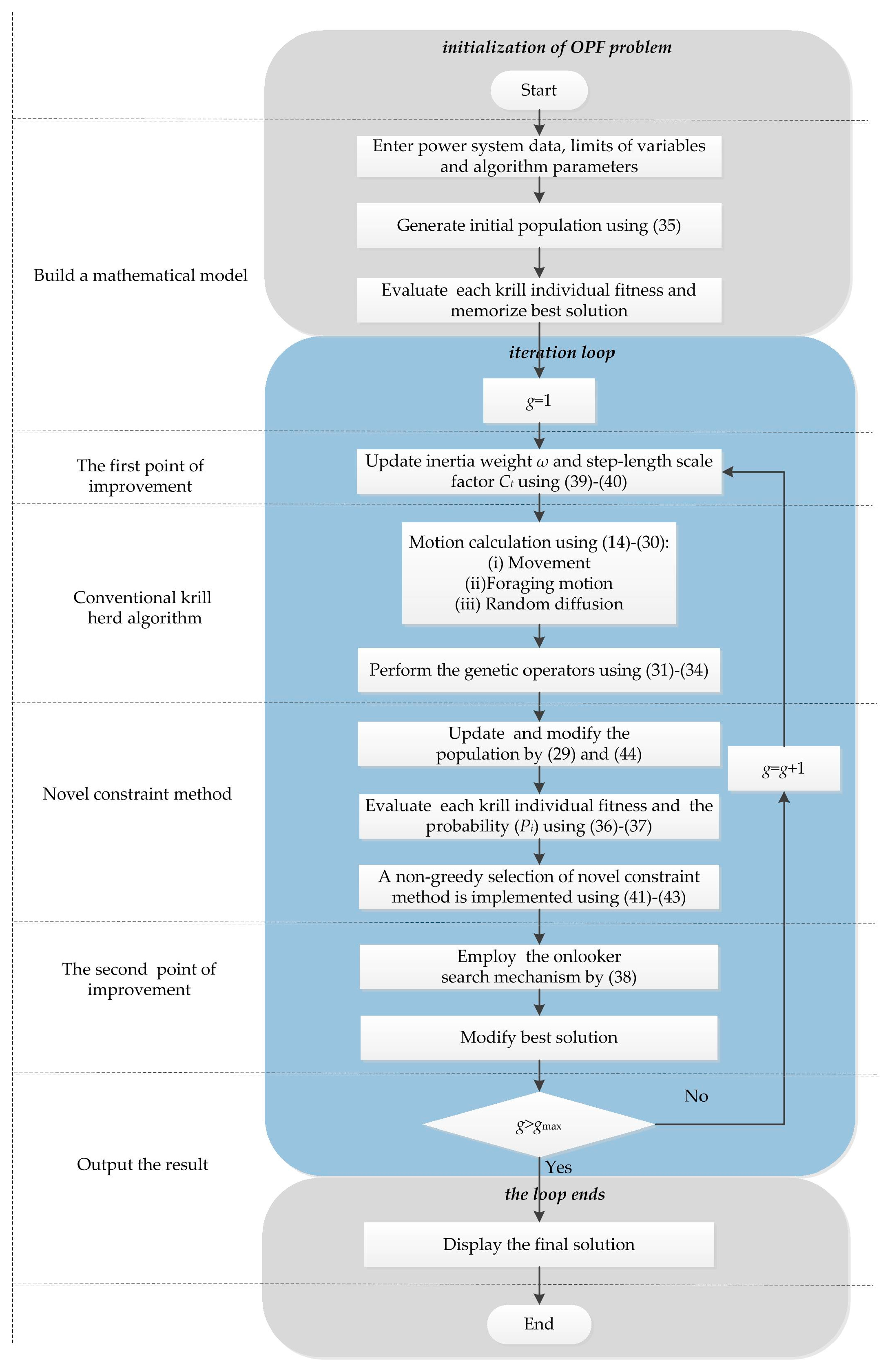
Some steps involved to solve the OPF problem by IKHA algorithm are presented in the flowchart shown in Figure 1.
4. Novel Constraint Handling Method
The non-linear, non-convex constrained optimization problem can be solved by indirect and direct methods. The indirect method means that constraints are incorporated in an explicit manner and the direct method means that constrained optimization problem is converted into unconstrained optimization problem [26]. In this paper, an indirect method combined with a non-greedy selection is proposed, which is divided into two parts as follows.
4.1. State Variable Constraint
In this method, the inequality constraints of state variables which contain real power generation at slack bus PG1, reactive power generation at PV buses QG, load bus voltage magnitude VL and line loading Sl are considered as the conditions of selecting optimal individual and mathematically formulated as:
where Constraint(Xi) is the constraint evaluation value of Xi. CV、 CQ、 CP and CS are constraint coefficients of state variables, respectively. Cos(VLi), Cos(QGi), Cos(PG1) and Cos(Sli) respect the constraint value of the state variable VL, QG, PG1, Sl at the current operating state Xi, and each one can be expressed as follows:
where xi represents ith state variable of VL, QG, PG1 and Sl. ximin and ximax are lower and upper bounds of the state variable, respectively. Constraint coefficients are usually 1, but in large systems, if some state variable is easy to violate constraints, the value of its corresponding constraint coefficient can be increased.
A non-greedy selection based on constraint evaluation value Constraint(Xi) is introduced to pick out qualified solutions, mathematically formulated as:
The selection is applied in the algorithm to guide the individual to the feasible space.
4.2. Control Variable Constraint
On the other hand, the control variable is self-constrained. When the independent variable violates limits then the position of it will be adjusted as follows:
where Xj,best is the corresponding variable of the best individual, r1 and r2 are uniformly distributed random variables between 0 and 1.
5. Application and Simulation Results
To verify the efficiency of the proposed algorithm, 3 different types of test system and 10 different cases are considered for simulation, which are summarized in Table 1. For each case, 30 runs are conducted to get the solution quality. In addition, Table 2 shows some parameter values of IKHA and KHA. The choices of these values which are obtained from multiple experiments can make the method have better search efficiency.
The simulations were performed in Matlab 2014 on a 3.30 GHz personal computer with 8.00 GB for random access memory (RAM) and the optimization results obtained by IKHA are compared with the results of KHA and other methods presented in the recent literatures. All of constraint coefficients of the novel constraint method are set to be 1 in IEEE 30 bus system, but CV and CQ are set to be 500 in IEEE 57 bus and IEEE 118 bus systems. Besides, KHA employs the penalty function to handle the constraints on state variables, and all of the penalty factors are set to be 500.
5.1. IEEE 30 Bus System
The system has 6 generators, 41 branches, 9 shunt reactive compensations and 4 transformers, which also has 2.834 p.u. for the active power demand and 1.262 p.u. for the reactive power demand on base of 100 MVA. In addition, the detailed line date, the bus date and the cost coefficients are given in [27,28]. The transformer tap settings are divided into 20 discrete steps. The minimum and maximum limits are 0.9 p.u. and 1.1 p.u., and the step size is 0.01 p.u. The shunt reactive compensation is divided into 50 discrete steps with a step of 0.001 p.u.; and the lower and upper limits are 0.0 p.u. and 0.05 p.u., respectively. Furthermore, the voltage magnitudes of generator buses are assumed to vary in the range [0.95, 1.1] p.u., and the lower and upper limits of load buses are considered to be 0.95 p.u. and 1.05 p.u., respectively.
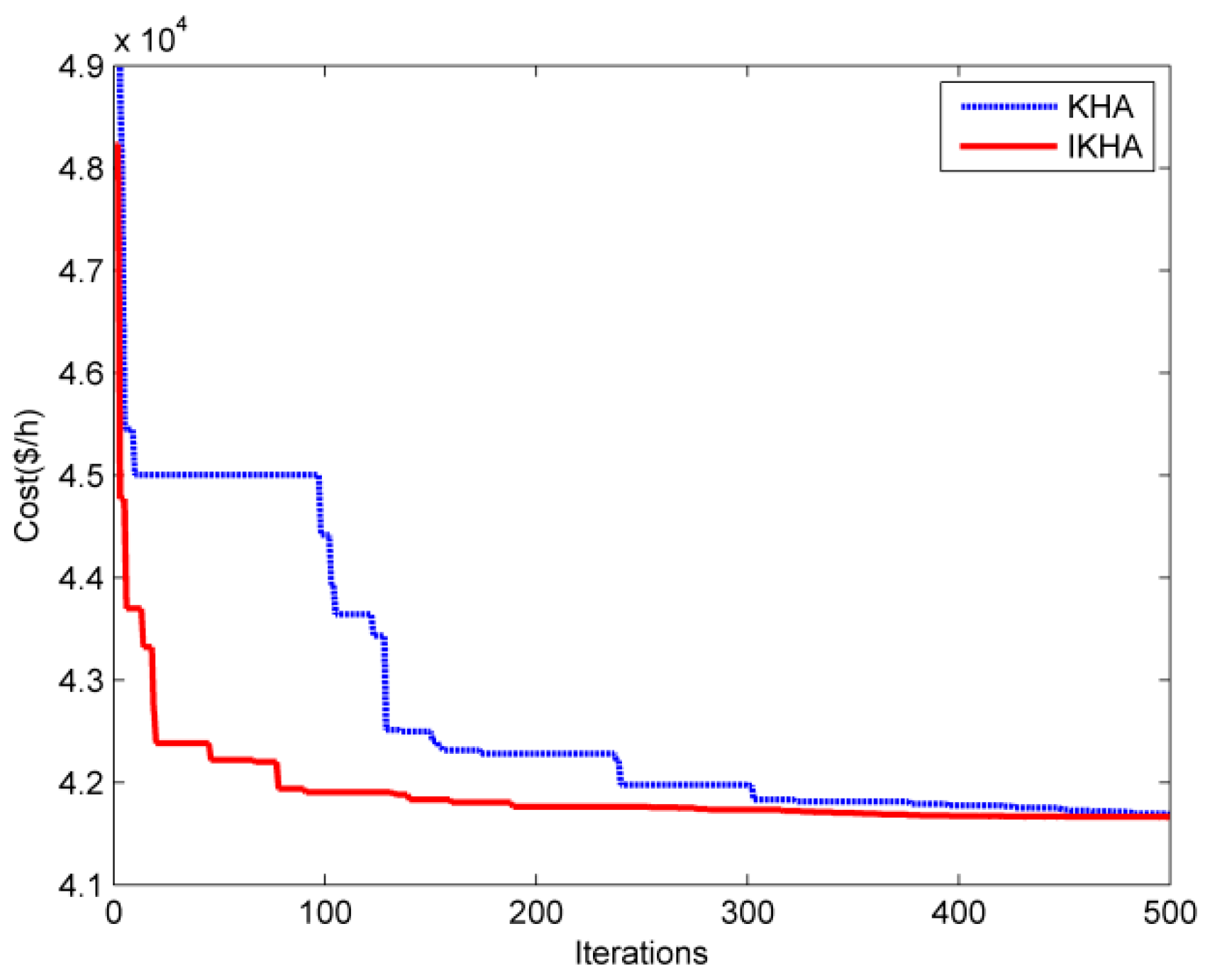
5.1.1. Case 1: Minimization of Quadratic Fuel Cost Function
The objective of the total fuel cost is widely used and it can be formulated by a quadratic curve as follows:
where ai, bi and ci are the cost coefficients of the ith generator.
In actual operation of power systems, the fuel cost of generators is affected by some factors. Therefore, two other general formulas for calculating the fuel cost are also considered in this paper: Case 1-a and Case 1-b.
Case 1-a considers the situation where the generators use multiple fuel sources like natural gas, oil and coal. The mathematical formulation of these generators is described as a set of piecewise quadratic cost functions for different fuel types, which can be defined as:
where aik, bik and cik are the cost coefficients of the ith generator for fuel type k. In this case, the generators at buses 1 and 2 have two different types of fuel cost sources, and their cost coefficients are presented in [12]. The cost functions of other generators have the same presentations as Case 1. Clearly, the problem becomes non-continuous which may result in local optimum and the total objective function can be described as:
Case 1-b considers the valve point effect which is described as an absolute sinusoidal function [29]. In this case, the valve point effect is added to the basic quadratic cost functions of generators at buses 1 and 2, and the non-differential objective function is calculated as follows:
where ai, bi, ci, di and ei are cost coefficients of the ith generator, and the cost coefficients of buses 1 and 2 are given in [23]. The cost coefficients of other generators remain the same values as Case 1.
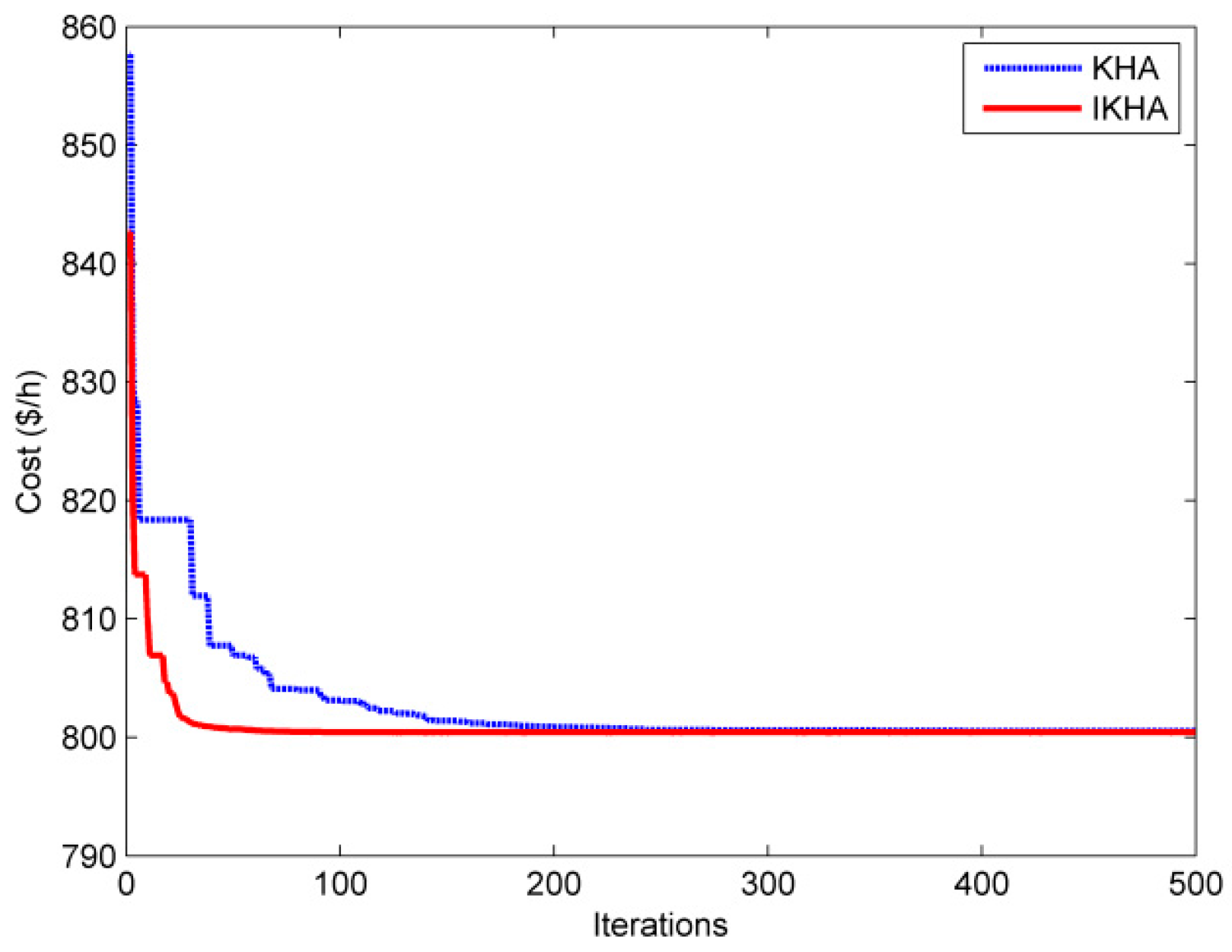
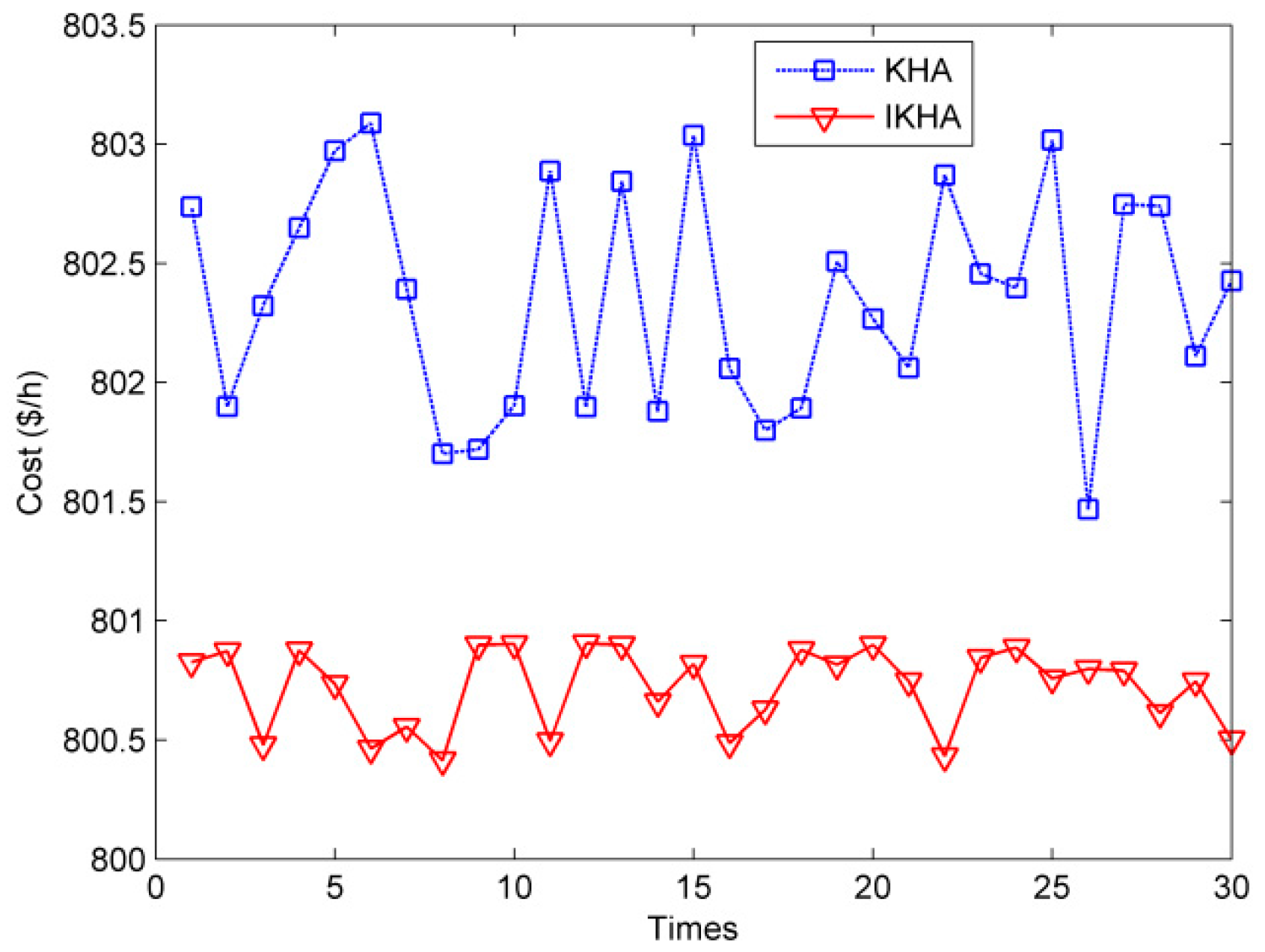
For Case 1, the optimal control variables and objective function value of IKHA are shown in Table 3, and the comparison of the results obtained by IKHA and other methods reported in recent literatures is shown in Table 4. The computation time is a vital issue in power system operation which depends on the algorithm’s search efficiency, maximum iteration number and population size. In recent literatures, the maximum iteration number and population size which are related to time complexity are usually not the same. The average computation time of the single iteration is considered to reflect the algorithm efficiency in this paper. Thus, the simulation time and maximum iteration number of methods are recorded which can be seen in Table 4. It is worth noting that the result with ‘a’ represents an infeasible solution. NA means that the datum is not reported in the referred literature. From the tables, it is clear that the minimization of quadratic fuel cost obtained by IKHA is better than KHA, modified shuffle frog leaping algorithm (MSLFA) [30], ABC [31], moth swarm algorithm (MSA) [22], modified Gaussian bare-bones imperialist competitive algorithm (MGBICA) [32], Jaya [33] and adaptive real coded biogeography-based optimization (ARCBBO) [34]. The single iteration computation times of ABC [31] and Jaya [33] are longer than IKHA, which shows the search efficiency of IKHA. The result of IKHA is greatly reduced to 800.4143 $/h comparing with 801.4675 $/h obtained by KHA, and the difference of the simulation time is small which proves the effectiveness of the proposed method. Although the results obtained by GSA [35] and biogeography based optimization (BBO) [36] are less than IKHA, the optimal solutions are regarded as unqualified solutions for violating system security constraints mentioned before. Meanwhile, Figure 2 shows the optimal convergence curves over the iterations and Figure 3 shows the results in 30 independent simulations of IKHA and KH for case 1. As shown in Figure 2, the initial value of IKHA is smaller than KHA due to the novel constraint method; and IKHA has smooth curve with a better convergence than KHA. Moreover, the distribution range of results of IKHA is smaller than KHA according to Figure 3, which demonstrates that IKHA has a stronger robustness.
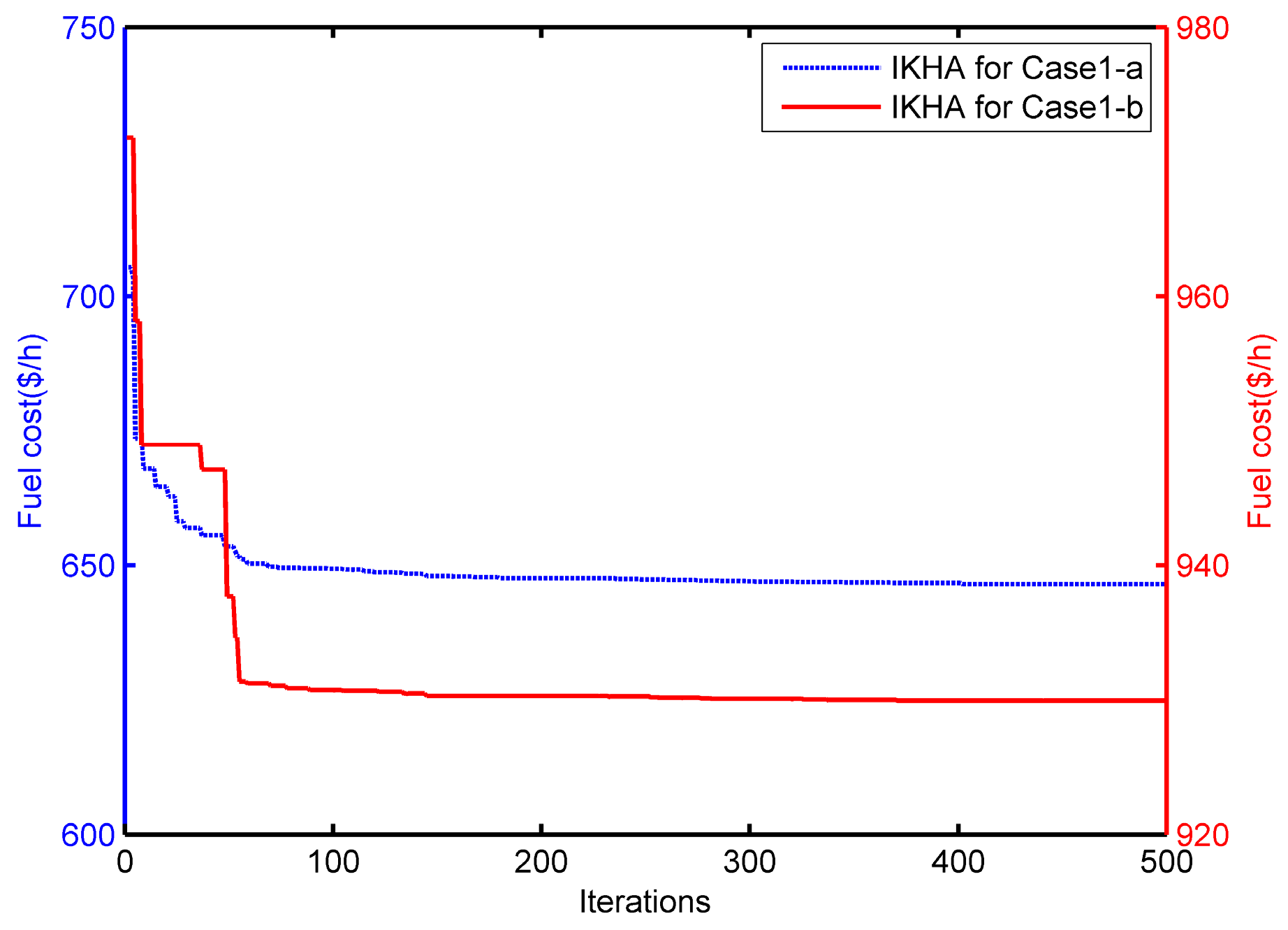
For Case 1-a and Case 1-b, the optimal control variables and objective function values of IKHA are shown in Table 3, and the comparison of the results is shown in Table 5. It can be seen that the results of IKHA are 646.5126 $/h and 929.9010 $/h for Case 1-a and Case 1-b, which are both less than KHA and MSA [22]. Furthermore, the optimal convergence curves of IKHA for Case 1-a and Case 1-b are shown in Figure 4 which demonstrates the convergence characteristic. According to the experimental data of the three situations, the proposed method can successfully solve the non-differential and non-continuous OPF problem which contains the discrete and continuous variables.
5.1.2. Case 2: Minimization of Voltage Magnitude Deviation
The function which is an important safety quality index aims to minimize the deviation of the PQ buses voltages from 1.0, and it can be formulated as follows:
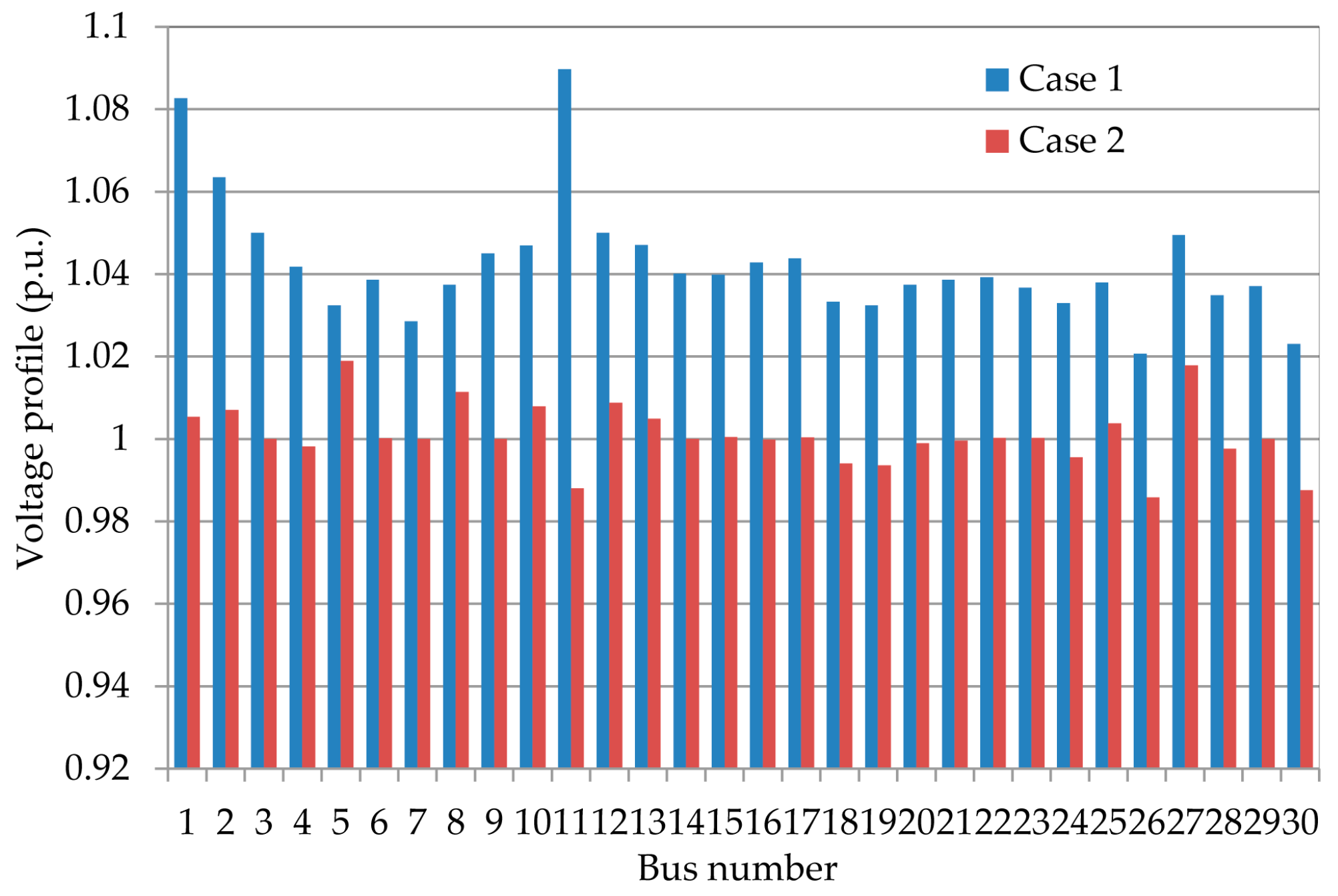
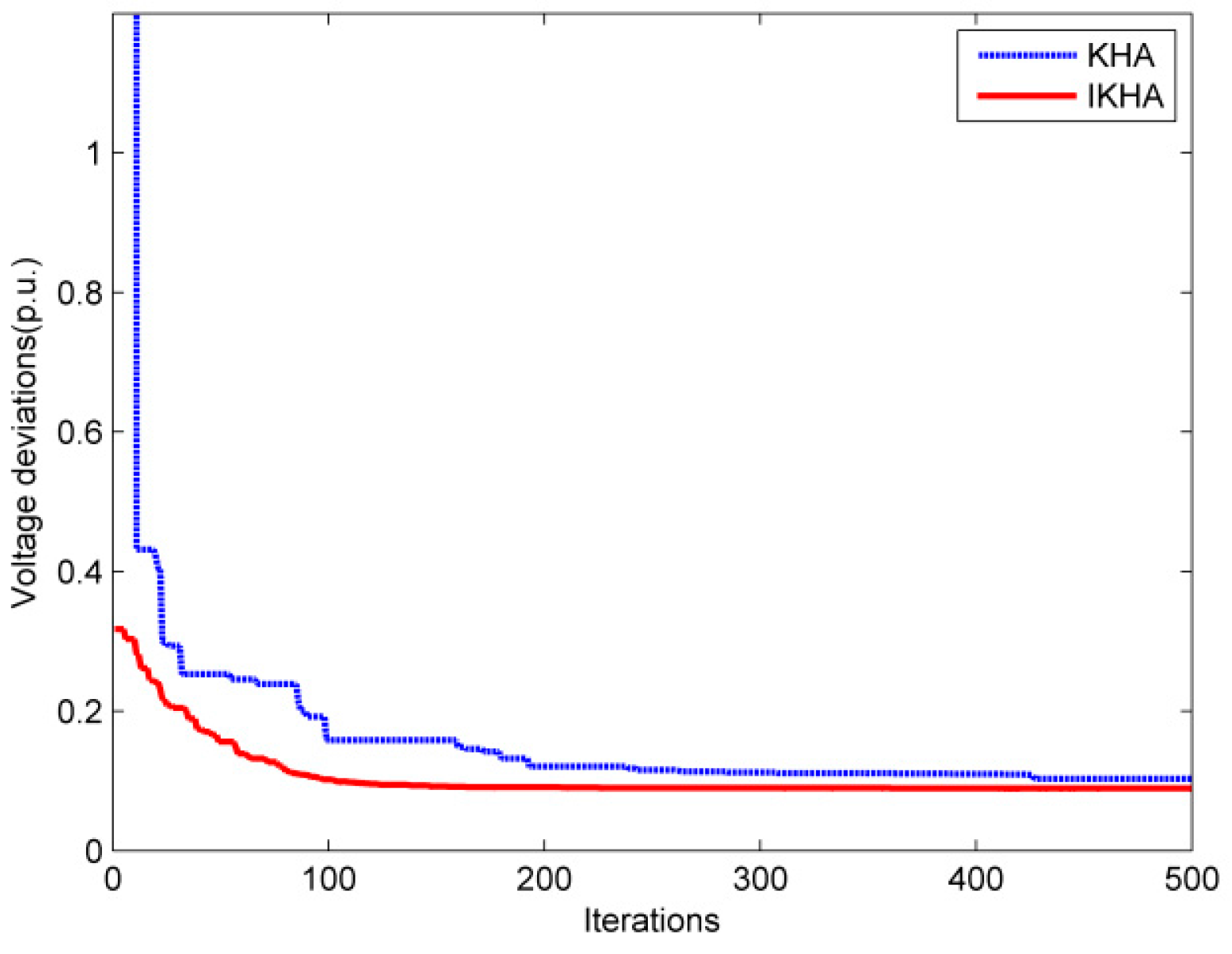
where NL is the number of load buses and Vi represents the voltage magnitude of ith load bus. For case 2, Table 3 shows the optimal solutions of IKHA and Table 6 shows the comparison of the results obtained by IKHA and other methods. It can be seen that the minimization of voltage magnitude deviation of IKHA is 0.0892 p.u., which is less by 0.0137, 0.0347, 0.0082 and 0.0059 p.u. comparing with KHA, MGBICA [32], lévy teaching–learning-based optimization (LTLBO) [23] and BBO [36], respectively. Moreover, the voltage magnitude deviation in this case is decreasing from 0.9215 p.u. obtained by case 1 to 0.0892 p.u., which is equivalent to 90% reduction. In order to make the result of case 2 clearer, the comparison of voltage profiles between case1 and case 2 is shown in Figure 5, and the optimal convergence curves of IKHA and KH is shown in Figure 6. It is noted that the initial value of KHA is not shown in Figure 6 for making the convergence curve better clear. The reason for this is that the difference between the initial values of IKHA and KHA is larger due to the difference of the novel constraint method and the penalty function method. Obviously, the proposed method can guide the individual to find the better location in the viable domain.
5.1.3. Case 3: Minimization of Fuel Cost Emission
Aimed to minimize the harmful gas amount, such as SOx and NOx, the objective for the generators can be defined as bellow [37]:
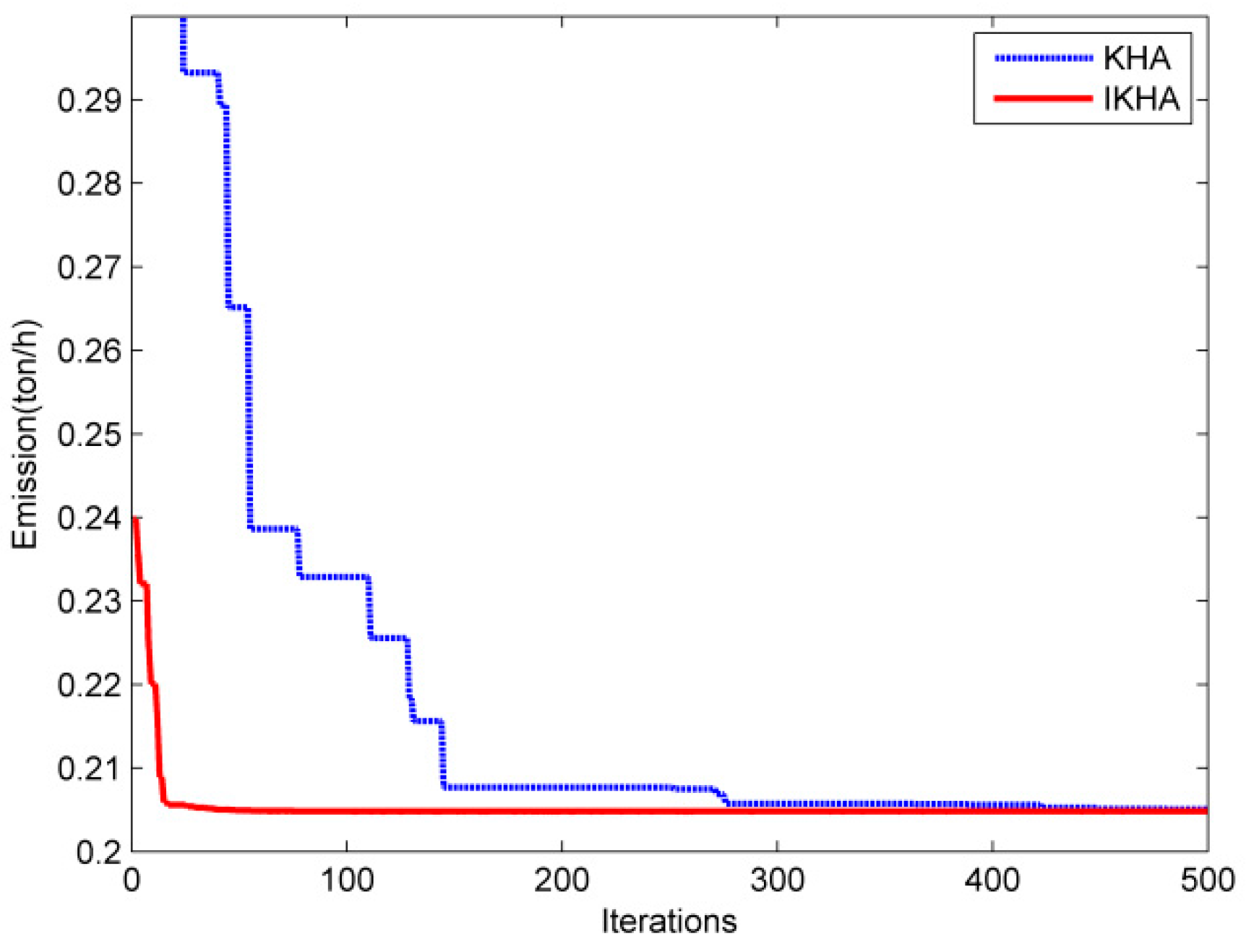
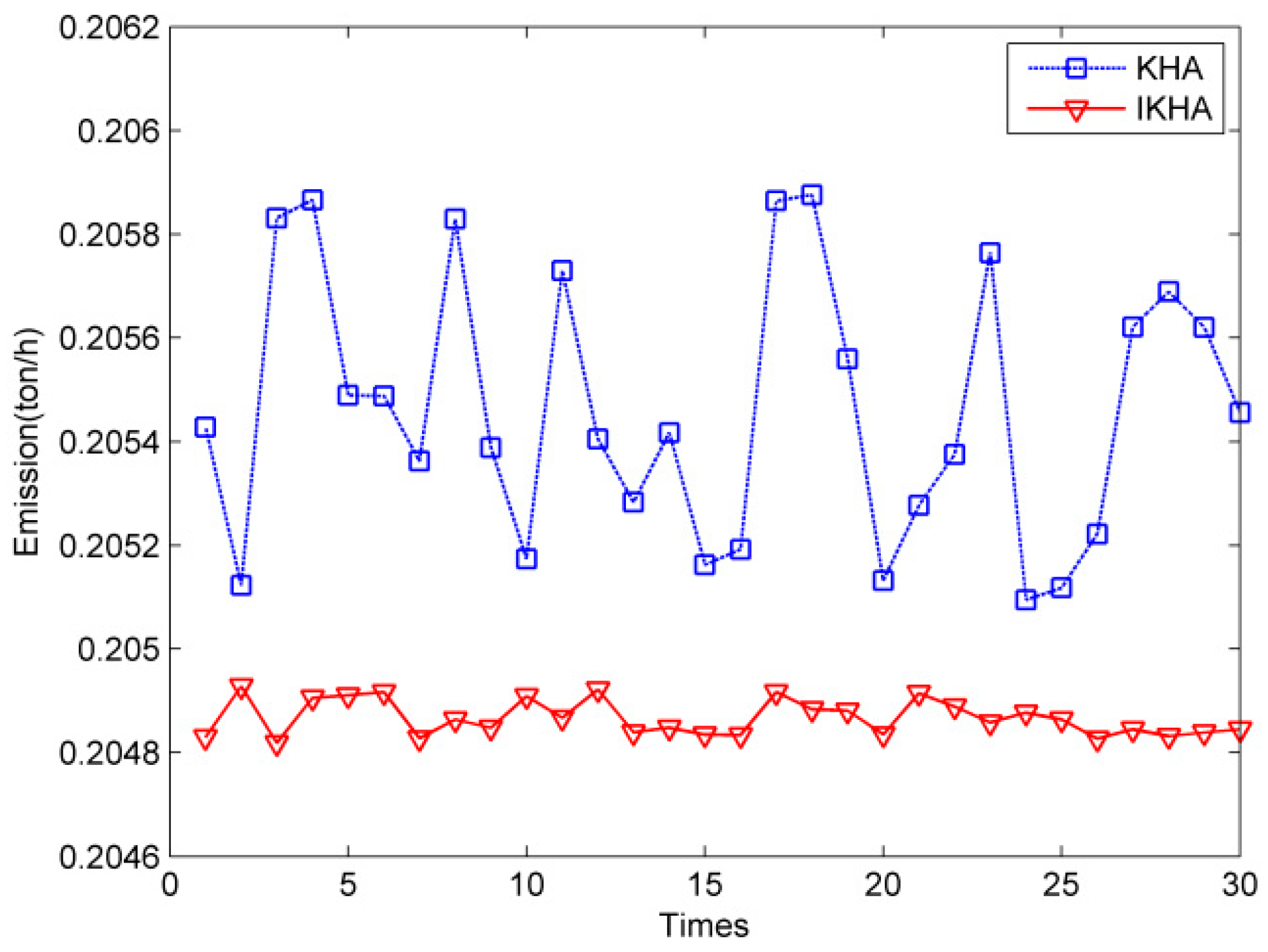
where αi, βi, γi, ξi and λi are the emission coefficients of the ith generator. NG represents the number of generator buses. The setting of optimal control variables of IKHA are presented in Table 3, which shows that the minimum of fuel cost emission obtained by IKHA is 0.204818 ton/h. The simulation result is compared with other methods in Table 7, and better than KHA, differential search algorithm (DSA) [9] ABC [31], MSA [22], MGBICA [32] and MSLFA [30]. Compared with the above cases, this objective function is non-linear. The result of IKHA, which is less 0.001002 than KHA, proves that the proposed method can get not only the better optimal solution but also better convergence curve when solving non-linear problem as shown in Figure 7. Besides, Figure 8 shows the results in 30 independent simulations of IKHA and KH for case 3, which indicates the robustness of IKHA.
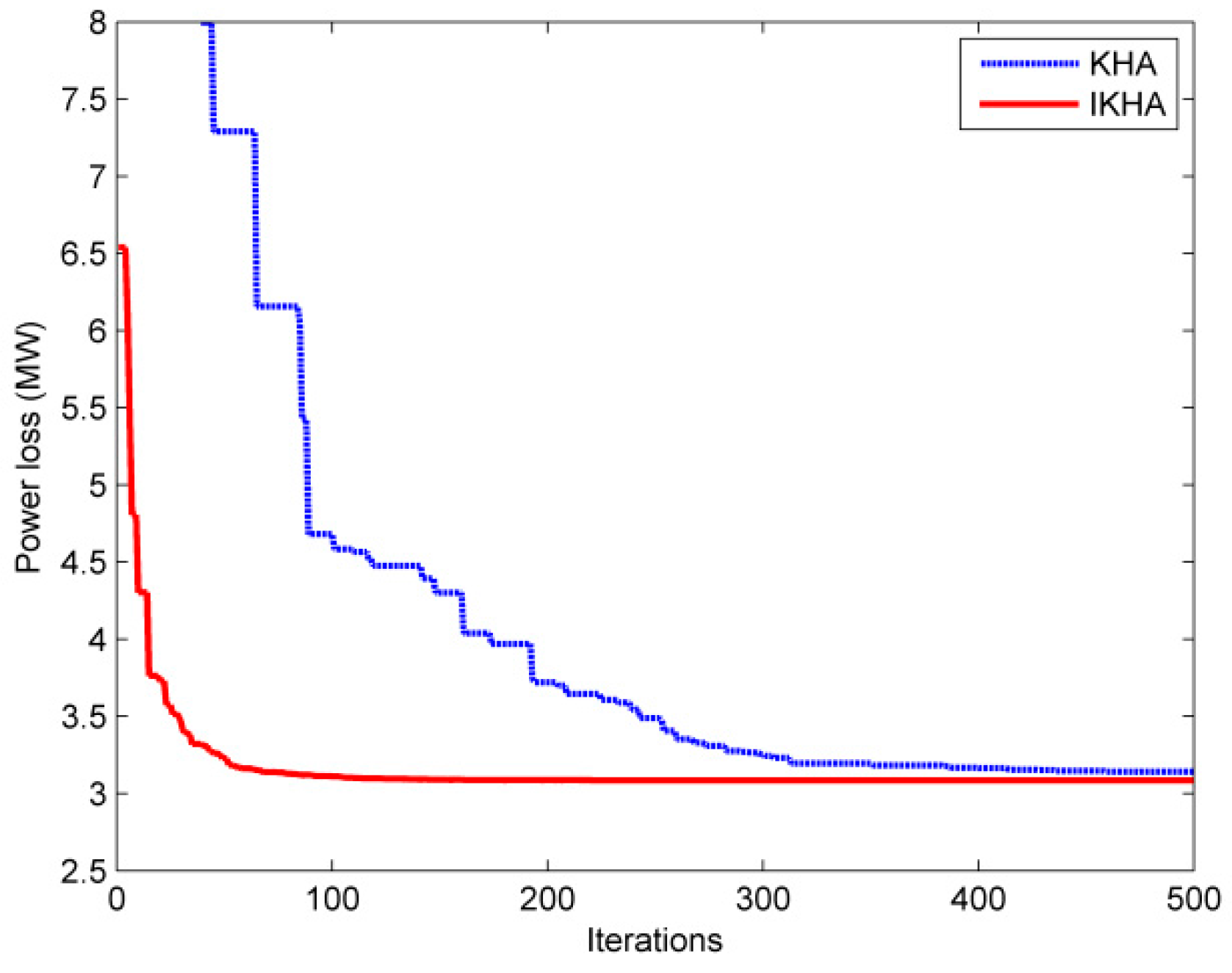
5.1.4. Case 4: Minimization of Transmission Real Power Losses
The function determined by the bus voltage magnitude and angle is the total active power losses of all transmission lines, and can be formulated as follows:
where Gk is the conductance between bus i and bus j, and NTL is the number of transmission lines. It can be seen in Table 3 that the minimization of transmission real power losses obtained by IKHA is 3.0850 MW, and the result is less than KHA, ABC [31] Combined approach [28], DSA [9] MSA [22], MGBICA [32], Proposed efficient evolutionary algorithm (EEA) [38], Jaya [33] and ALC-PSO [13] reported in Table 8. But the single iteration computation times of Proposed EEA [38] and ALC-PSO [13] are shorter than IKHA. As shown in Figure 9 and Figure 10, to a certain extent, the onlooker search mechanism reduces the probability of falling into the local optimal and makes the IKHA obtain a better solution compared with the basic KHA.
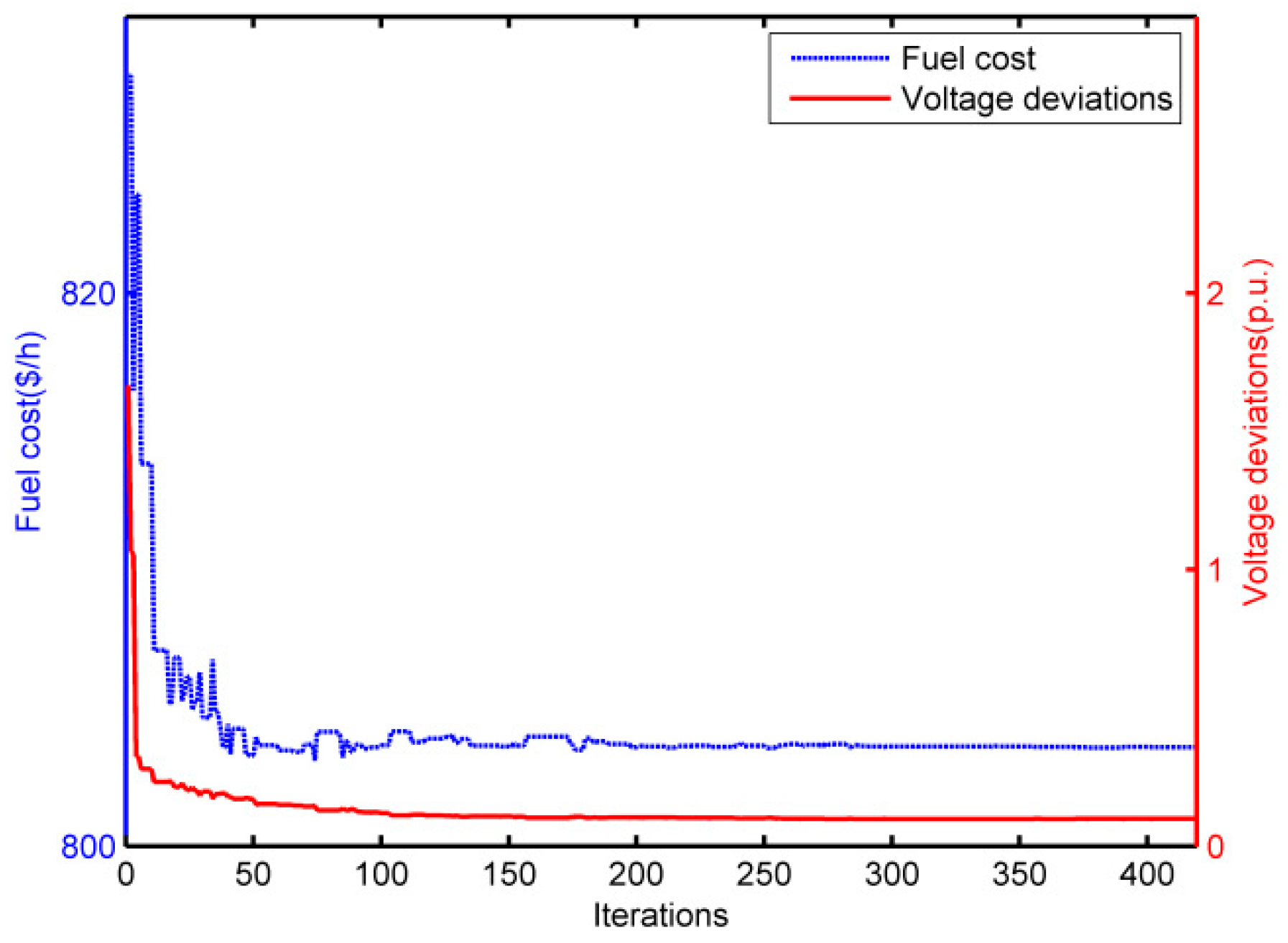
5.1.5. Case 5: Minimization of Quadratic Cost and Voltage Magnitude Deviation
Generally, the weighted sum method is used to make multi-objective into a single objective problem. This case is aimed to simultaneously minimize the quadratic cost and voltage magnitude deviation, which can be expressed as:
where λD selected by the user is a weighting factor and it is selected as 100 in this study [23]. Table 3 shows that the quadratic fuel cost and voltage magnitude deviation for case 5 of IKHA are 803.5879 $/h and 0.0984 p.u, respectively. It is also shows 0.3965% increase in the quadratic fuel cost and 89.32% reduction in the voltage magnitude deviation compared with case 1. Additionally, the results are compared with other methods, and the comparison is shown in Table 9. According to the value of the weighted sum, IKHA is better than KHA, particle swarm optimization and gravitational search algorithm (PSOGSA) [29], The proposed KHA [39], adaptive biogeography based predator–prey optimization (ABPPO) [40], MSA [22], LTLBO [23], Gbest guided artificial bee colony algorithm (GABC) [24] and ICBO [12] Looking at the two goals separately, the results of IKHA are lower than those of KHA and the proposed KHA For the results of the other methods in Table 8, such as the PSOGSA [29], only one of the two goals is better than IKHA. As the individual evaluation criteria are different, the optimal solution is different. The optimal convergence curves of quadratic fuel cost and voltage magnitude deviation of IKHA are shown in The Figure 11.
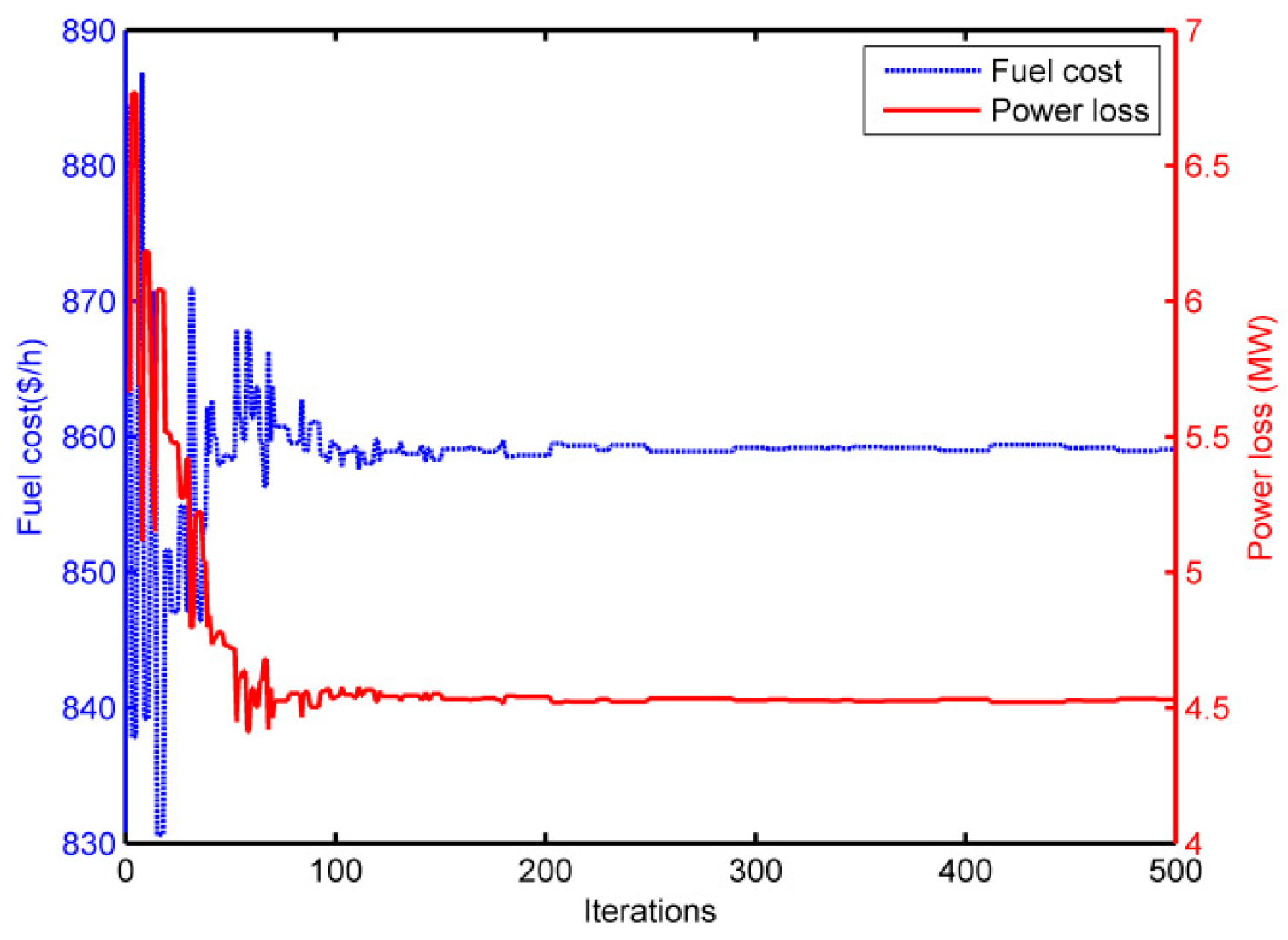
5.1.6. Case 6: Minimization of Quadratic Cost and Transmission Real Power Losses
Similarly, this case minimizes the quadratic cost and transmission real power losses at the same time through the weighted sum method, which is calculated as:
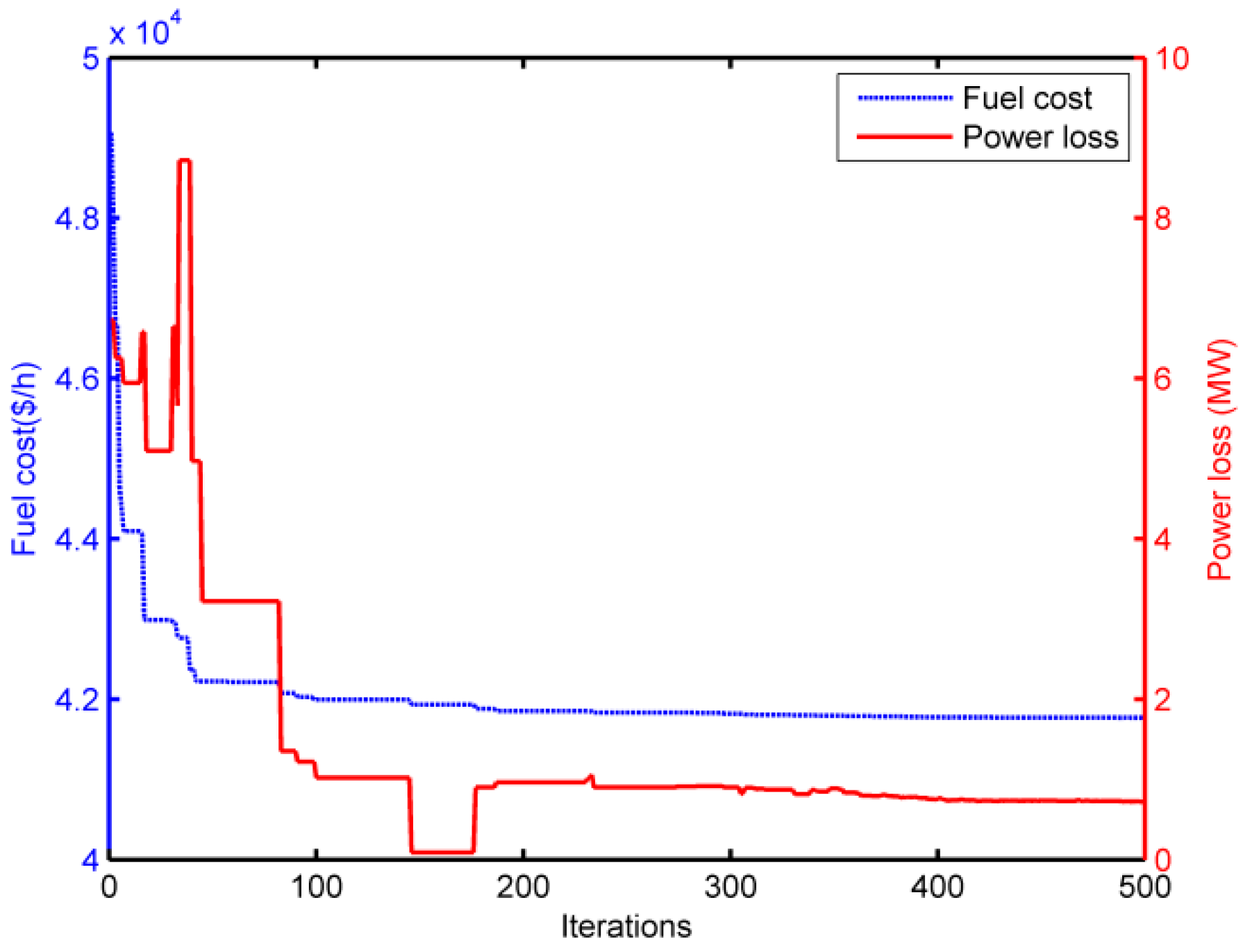
where λL selected by the user is a weighting factor and it is selected as 40 in this study [22]. From Table 3, the quadratic fuel cost and transmission real power losses for case 6 obtained by IKHA are 859.0579 $/h and 4.5291 MW, respectively. It is also shows 7.3266% increase in the quadratic fuel cost and 49.661% reduction in the transmission real power losses compared with case 1. The simulation results are compared with other methods in Table 10, and the value of the weighted sum is better than KHA, MSA [22], modified differential evolution (MDE) [22], PSOGSA [29] and ABPPO [40]. The analysis of current case is similar to Case 5 because that the different criteria make different choices. The Figure 12 shows the optimal convergence curves of quadratic fuel cost and transmission real power losses over the iterations, which is very different from Figure 11 due to the differences between nonlinear and linear objective functions. This case proves that IKHA can handle the OPF problem successfully.
5.2. IEEE 57 Bus System
The system has seven generators, three shunt reactive compensations and 15 transformers, which also has 12.508 p.u. for the active power demand and 3.364 p.u. for the reactive power demand on base of 100 MVA. All detailed line date, the bus date and the cost coefficients are given in [41]. The transformer tap settings are divided into 2000 discrete steps. The minimum and maximum limits are 0.9 p.u. and 1.1 p.u., and the step size is 0.0001 p.u. The shunt reactive compensation is divided into 3000 discrete steps with a step of 0.0001 p.u.; and the lower and upper limits are 0.0 p.u. and 0.3 p.u., respectively. Furthermore, the voltage magnitudes of generator buses are assumed to vary in the range [0.9, 1.1] p.u. and the lower and upper limits of load buses are considered to be 0.94 p.u. and 1.06 p.u., respectively.
5.2.1. Case 7: Minimization of Quadratic Fuel Cost Function
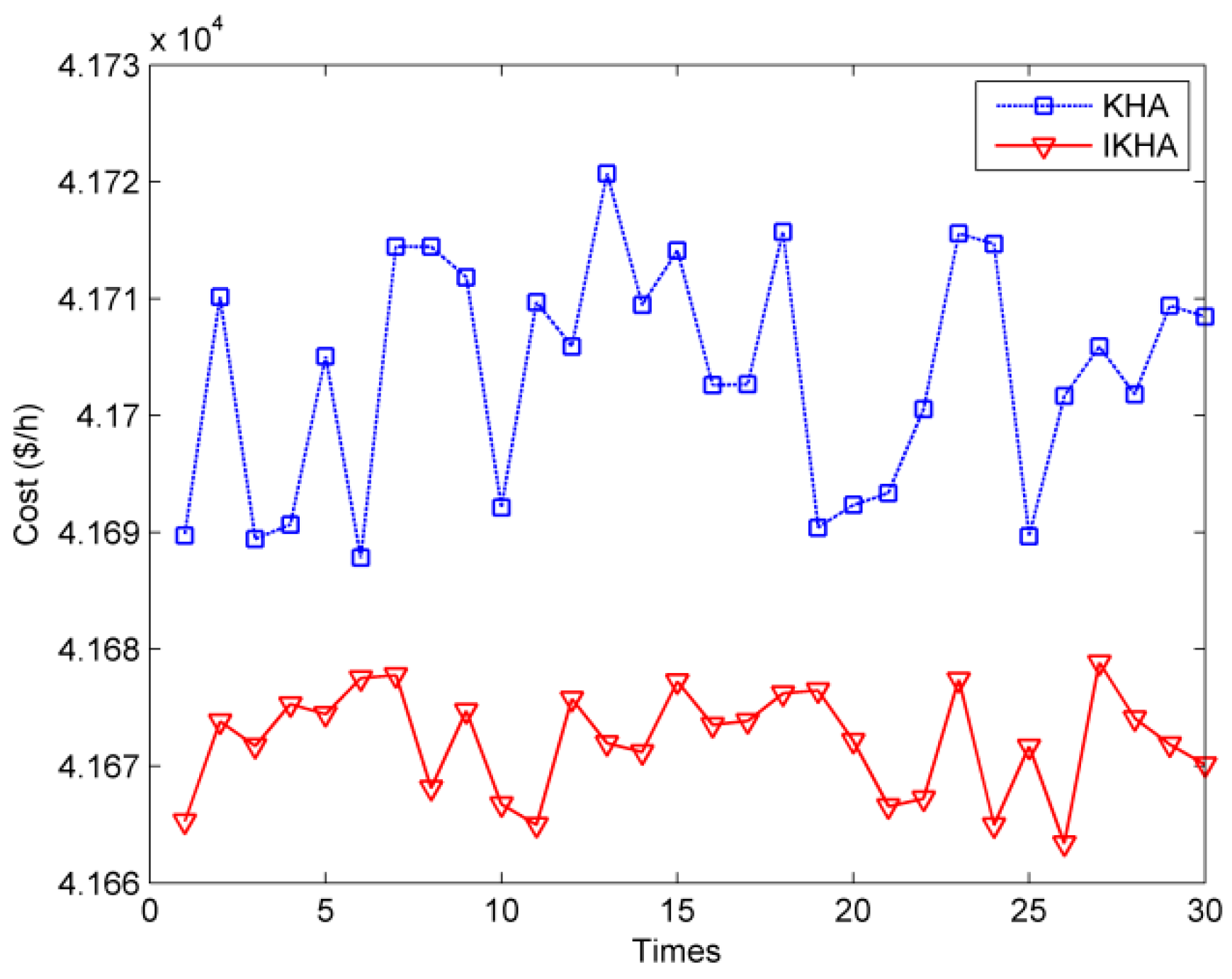
The objective function in this case is the minimization of quadratic cost which is given by Equations (45) and (46). The setting of optimal control variables for case 7 of IKHA are presented in Table 11, which shows that the minimum of quadratic fuel cost obtained by IKHA is 41,663.391 $/h. The simulation result is compared with other methods in Table 12, and less than the results of KHA, MSA [22], LTLBO [23], ICBO [12], DSA [9], ARCBBO [34] and GABC [42]. Figure 13 shows the optimal convergence curves over the iterations and Figure 14 shows the results in 30 independent simulations of IKHA and KH for case 7. From Figure 13, it is clear that the convergence characteristic is not as good as case 1 in the same maximum iteration number, and the reason is that the system becomes bigger which means that the problem is more complicated. Besides, the initial value of KHA is also not shown in Figure 13 and the reason is described in case 2. Moreover, the distribution range of results of IKHA is smaller than KHA according to Figure 14, which demonstrates that IKHA also has a stronger robustness in larger systems.
5.2.2. Case 8: Minimization of Voltage Magnitude Deviation
The goal of this case is to minimize the voltage magnitude deviation which is given by Equation (50). The setting of optimal control variables of IKHA for case 8 are presented in Table 11. Apparently, the solution in this case is decreasing from 1.5494 p.u. obtained by case 7 to 0.552 p.u., which is equivalent to 64.3733% reduction. In order to make the result of case 8 clearer, the comparison of voltage profiles between case7 and case 8 is shown in Figure 15.
5.2.3. Case 9: Minimization of Quadratic Cost and Voltage Magnitude Deviation
In this case, the objective function is to minimize the quadratic cost and voltage magnitude deviation simultaneously, which is given by Equation (53). It can be seen in Table 11 that the quadratic fuel cost, voltage magnitude deviation and the value of the weighted sum are 41,697.5456 $/h, 0.7233 p.u. and 41,769.8815, respectively. And the results both are less than DSA [9].The optimal solution of MSA [22] shows 0.0418% increase in the quadratic fuel cost and 6.2381% reduction in the voltage magnitude deviation compared with IKHA. Additionally, the optimal convergence curves of quadratic fuel cost and voltage magnitude deviation over the iterations of IKHA for case 9 are shown in Figure 16.
5.3. IEEE 118 Bus System
The IEEE 118 bus system has 54 generators, 186 lines, nine transformers and 14 shunts reactive compensations which contain 2 reactors and 12 capacitors. The active and reactive power demands of the large system are 42.42 p.u and 14.39 p.u. on base of 100 MVA, respectively. Furthermore, the detailed data and cost coefficients of the system are taken form [41]. The transformer tap settings are divided into 200 discrete steps. The minimum and maximum limits are 0.9 p.u. and 1.1 p.u., and the step size is 0.001 p.u. The shunt reactive compensation is divided into different discrete steps and has different minimum and maximum limits which can be seen in [41]. The larger the system is, the harder the convergence of OPF problem will be. So, in this system, the maximum iteration number gmax is set as 1000.
Case 10: Minimization of Quadratic Fuel Cost Function
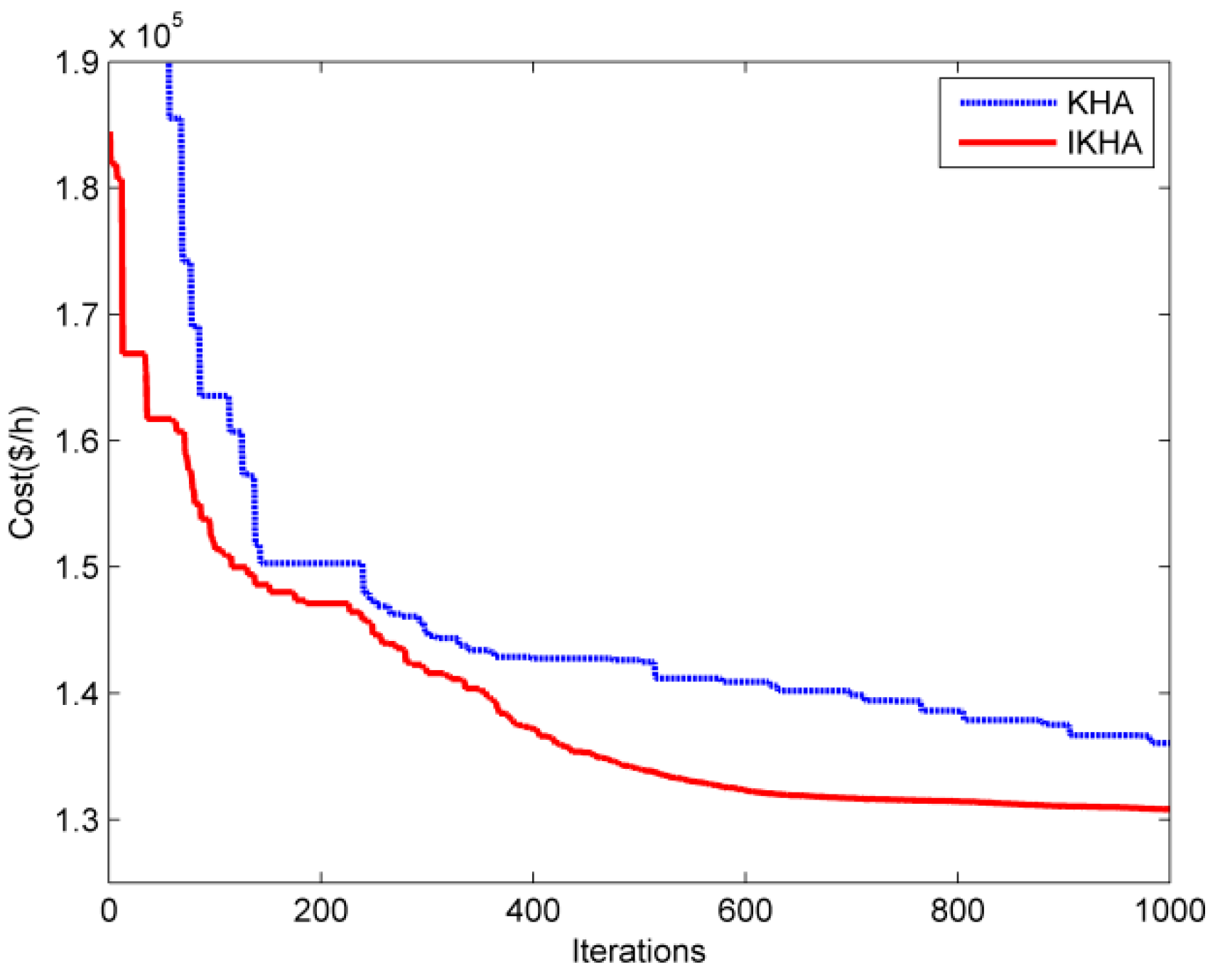
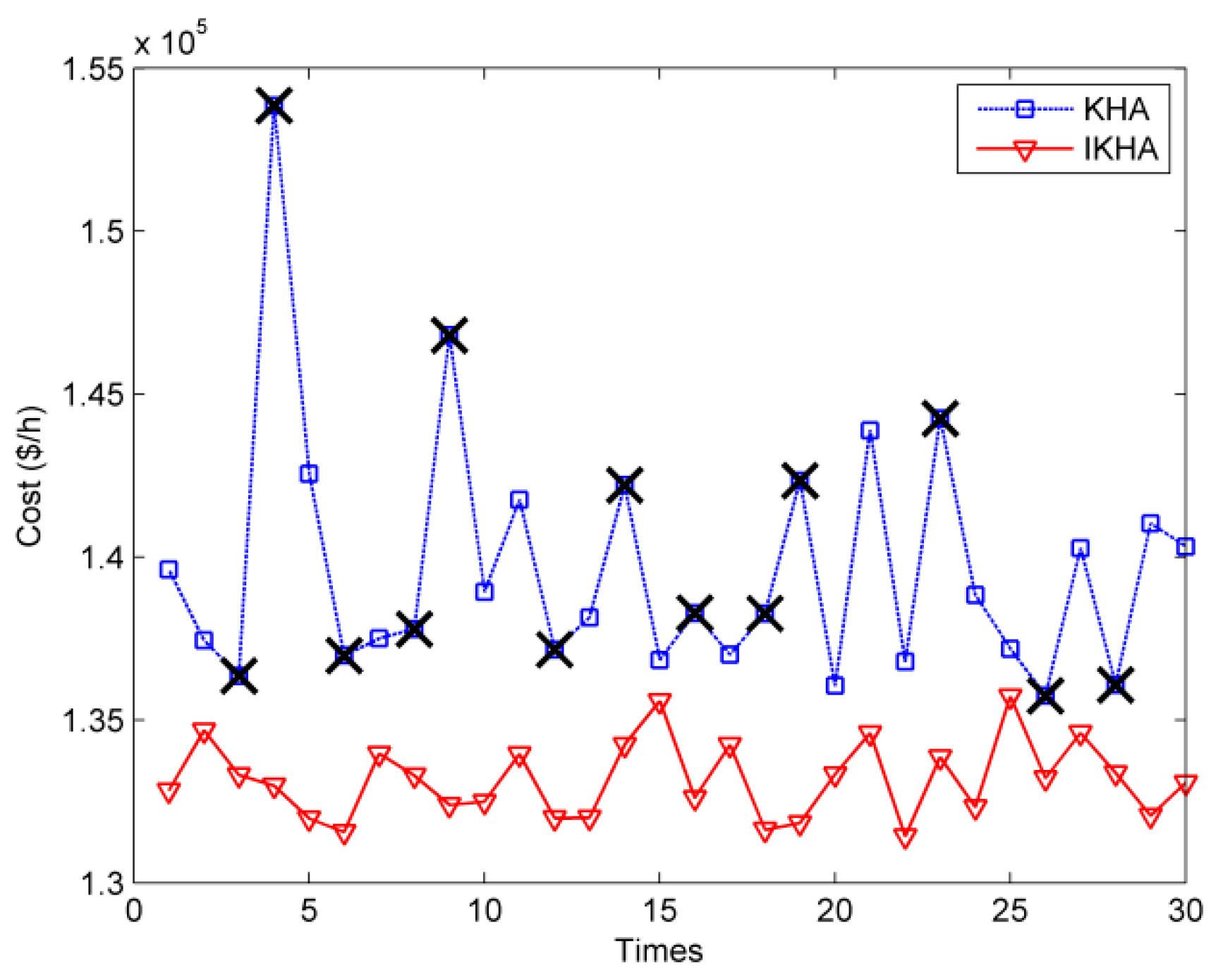
The objective function in this case is the minimization of quadratic fuel cost which is given by Equations (45) and (46). The setting of optimal control variables of IKHA is presented in Table 13, and the comparison of the results obtained by IKHA and other methods is shown in Table 14. From the tables, it is clear that the minimization of quadratic fuel cost obtained by IKHA is better than KHA, backtracking search algorithm (BSA) [43] and ICBO [12]. In addition, the difference of single iteration computation time between IKHA and KHA is small, which proves the efficiency of the proposed method. The best result given in MSA [22] is an infeasible solution because the voltage magnitudes at some buses (25, 26, 49, 59, 61, 65, 66, 69, 70, 77, 80 and 100) violate their upper limits. From the point of economic, the result of IKHA is really good, which is less 4624.7028 $/h than KHA. Meanwhile, Figure 17 illustrates the convergence characteristic and Figure 18 shows the results in 30 independent simulations of IKHA and KH for case 10. In Figure 17, the initial value of KHA is not shown and the reason is described in case 2. It is noted that the black ‘×’ in Figure 18 represents the optimal result which doesn’t satisfy the security constraints, namely infeasible solution.
Apparently, KHA with the penalty function method performs 13 invalid optimizations in 30 independent simulations. This illustrates that the optimization algorithm and constraint method are both worthy to be improved. According to the experimental data, the proposed method can solve the constraints successfully while getting a better result in larger systems.
6. Conclusions
For solving the optimal power flow (OPF) problem, which is a large-scale, multi-constrained, non-linear and non-convex problem, an improved krill herd algorithm (IKHA) with novel constraint handling method has been proposed in this paper. In order to show the practicability of the proposed method, three systems (IEEE 30 bus system, IEEE 57 bus system and IEEE 118 bus system) and 10 different cases containing linear and non-linear objective functions are considered for the OPF problem. Then, the results obtained from the IKHA are compared with KHA and other methods reported in the recent literatures. As the simulation results indicated, the proposed method can solve the OPF problem successfully whether the objective function is linear or non-linear, and outperform many other methods in terms of solution quality. Apparently, the proposed method has better robustness and convergence characteristics than KHA, and the improvement of IKHA is feasible and effective. It means that the onlooker search mechanism added to the basic KHA is useful to reduce the probability of falling into local optimum and the parameters varied according to the iteration of evolutionary process can improve the exploration and exploitation capabilities of KHA. Furthermore, the result of case 10 in IEEE 118 bus system shows that the novel constraint handling method which consists of two parts, control variable constraint and state variable constraint, overcomes the drawback of the traditional penalty function method and ensures the optimal solutions satisfy the security constraints, especially in larger systems. In a word, the proposed method successfully improves the current method and does well in dealing with variables constraints simultaneously.
Acknowledgments
This work is supported by Chongqing University Innovation Team under Grant KJTD201312 and the National Natural Science Foundation of China (Nos. 51207064 and 61463014).
Author Contributions
All the authors have contributed significantly. Gonggui Chen and Zhengmei Lu proposed the original ideas; Gonggui Chen designed the experiments and revised the paper; Zhengmei Lu performed the experiments and wrote the paper; Zhizhong Zhang analyzed the data, and provided language and financial support.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Daryani, N.; Hagh, M.T.; Teimourzadeh, S. Adaptive Group Search Optimization Algorithm for Multi-Objective Optimal Power Flow Problem. Appl. Soft Comput. 2016, 38, 1012–1024. [Google Scholar] [CrossRef]
- Sanseverino, E.R.; di Silvestre, M.L.; Badalamenti, R.; Nguyen, N.Q.; Guerrero, J.M.; Meng, L. Optimal Power Flow in Islanded Microgrids Using a Simple Distributed Algorithm. Energies 2015, 8, 11493–11514. [Google Scholar] [CrossRef] [Green Version]
- Capitanescu, F.; Glavic, M.; Ernst, D.; Wehenkel, L. Interior-point based algorithms for the solution of optimal power flow problems. Electr. Power Syst. Res. 2007, 77, 508–817. [Google Scholar] [CrossRef]
- Mota-Palomino, B.; Quintana, V.H. Sparse Reactive Power Scheduling by a Penalty Function—Linear Programming Technique. IEEE Trans. Power Syst. 1986, 1, 31–39. [Google Scholar] [CrossRef]
- Shoults, R.; Sun, D. Optimal Power Flow Based Upon P-Q Decomposition. IEEE Trans. Power Appar. Syst. 1982, PAS-101, 397–405. [Google Scholar] [CrossRef]
- Carpentier, J. Contribution a l’Etude du Dispatching Economique. Bulletin de la Societe Francaise des Electriciens 1962, 3, 431–474. [Google Scholar]
- Oliva, D.; Ewees, A.A.; Aziz, M.A.E.; Hassanien, A.E.; Cisneros, M.P. A Chaotic Improved Artificial Bee Colony for Parameter Estimation of Photovoltaic Cells. Energies 2017, 10, 865. [Google Scholar] [CrossRef]
- Khaled, U.; Eltamaly, A.; Beroual, A. Optimal Power Flow Using Particle Swarm Optimization of Renewable Hybrid Distributed Generation. Energies 2017, 10, 1013. [Google Scholar] [CrossRef]
- Abaci, K.; Yamacli, V. Differential search algorithm for solving multi-objective optimal power flow problem. Electr. Power Energy Syst. 2016, 79, 1–10. [Google Scholar] [CrossRef]
- Zhao, Z.; Yang, J.; Hu, Z.; Che, H. A differential evolution algorithm with self-adaptive strategy and control parameters based on symmetric Latin hypercube design for unconstrained optimization problems. Eur. J. Oper. Res. 2016, 250, 30–45. [Google Scholar] [CrossRef]
- Chen, G.; Liu, L.; Zhang, Z.; Huang, S. Optimal reactive power dispatch by improved GSA-based algorithm with the novel strategies to handle constraints. Appl. Soft Comput. 2017, 50, 58–70. [Google Scholar] [CrossRef]
- Bouchekara, H.R.E.H.; Chaib, A.E.; Abido, M.A.; El-Sehiemy, R.A. Optimal power flow using an Improved Colliding Bodies Optimizationalgorithm. Appl. Soft Comput. 2016, 42, 119–131. [Google Scholar] [CrossRef]
- Singh, R.P.; Mukherjee, V.; Ghoshal, S.P. Particle swarm optimization with an aging leader and challengers algorithm for the solution of optimal power flow problem. Appl. Soft Comput. 2016, 40, 161–177. [Google Scholar] [CrossRef]
- Capitanescu, F. Critical review of recent advances and further developments needed in AC optimal power flow. Electr. Power Syst. Res. 2016, 136, 57–68. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Alavi, A.H. Krill herd: A new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 2012, 12, 4831–4845. [Google Scholar] [CrossRef]
- Mukherjee, A.; Mukherjee, V. Chaos embedded krill herd algorithm for optimal VAR dispatch problem of power system. Electr. Power Energy Syst. 2016, 82, 37–48. [Google Scholar] [CrossRef]
- Bulatović, R.R.; Miodragović, G.; Bošković, M.S. Modified Krill Herd (MKH) algorithm and its application in dimensional synthesis of a four-bar linkage. Mech. Mach. Theory 2016, 95, 1–21. [Google Scholar] [CrossRef]
- Sultana, S.; Roy, P.K. Oppositional krill herd algorithm for optimal location of capacitor with reconfiguration in radial distribution system. Electr. Power Energy Syst. 2016, 74, 78–90. [Google Scholar] [CrossRef]
- Wang, G.; Deb, S.; Gandomi, A.H.; Abaci, K. Opposition-based krill herd algorithm with Cauchy mutation and position clamping. Neurocomputing 2016, 177, 147–157. [Google Scholar] [CrossRef]
- Wang, H.; Wang, W.; Sun, H.; Cui, Z.; Rahnamayan, S.; Zeng, S. A new cuckoo search algorithm with hybrid strategies for flow shop scheduling problems. Soft Comput. 2017, 21, 4297–4307. [Google Scholar] [CrossRef]
- Cui, L.; Li, G.; Zhua, Z.; Lin, Q.; Wen, Z. A novel artificial bee colony algorithm with an adaptive population size for numerical function optimization. Inf. Sci. 2017, 414, 53–67. [Google Scholar] [CrossRef]
- Mohamed, A.A.; Mohamed, Y.S.; El-Gaafary, A.A.M. Optimal power flow using moth swarm algorithm. Electr. Power Syst. Res. 2017, 142, 190–206. [Google Scholar] [CrossRef]
- Ghasemi, M.; Ghavidel, S.; Gitizadeh, M.; Akbari, E. An improved teaching–learning-based optimization algorithm using Lévy mutation strategy for non-smooth optimal power flow. Electr. Power Energy Syst. 2015, 65, 375–384. [Google Scholar] [CrossRef]
- Roy, R.; Jadhav, H.T. Optimal power flow solution of power system incorporating stochastic wind power using Gbest guided artificial bee colony algorithm. Electr. Power Energy Syst. 2015, 64, 562–578. [Google Scholar] [CrossRef]
- Xia, X. Particle Swarm Optimization Method Based on Chaotic Local Search and Roulette Wheel Mechanism. Phys. Procedia 2012, 24, 269–275. [Google Scholar] [CrossRef]
- Singh, M.; Dhillon, J.S. Multiobjective thermal power dispatch using opposition-based greedy heuristic search. Electr. Power Energy Syst. 2016, 82, 339–353. [Google Scholar] [CrossRef]
- Alsac, O.; Stott, B. Optimal Load Flow with Steady-State Security. IEEE Trans. Power Appar. Syst. 1974, 93, 745–751. [Google Scholar] [CrossRef]
- Reddy, S.S.; Bijwe, P.R. Efficiency improvements in meta-heuristic algorithms to solve the optimal power flow problem. Electr. Power Energy Syst. 2016, 82, 288–302. [Google Scholar] [CrossRef]
- Radosavljević, R.; Klimenta, D. Optimal Power Flow Using a Hybrid Optimization Algorithm of Particle Swarm Optimization and Gravitational Search Algorithm. Electr. Power Compon. Syst. 2015, 17, 1958–1970. [Google Scholar] [CrossRef]
- Niknam, T.; Narimani, M.R. A modified shuffle frog leaping algorithm for multi-objective optimal power flow. Energy 2011, 36, 6420–6432. [Google Scholar] [CrossRef]
- Adaryani, M.R.; Karami, A. Artificial bee colony algorithm for solving multi-objective optimal power flow problem. Electr. Power Energy Syst. 2013, 53, 219–230. [Google Scholar] [CrossRef]
- Ghasemi, M.; Ghavidel, S.; Ghanbarian, M.M.; Gitizadeh, M. Multi-objective optimal electric power planning in the power system using Gaussian bare-bones imperialist competitive algorithm. Inf. Sci. 2015, 294, 286–304. [Google Scholar] [CrossRef]
- Warid, W.; Hizam, H.; Mariun, N.; Abdul-Wahab, N.I. Optimal Power Flow Using the Jaya Algorithm. Energies 2016, 9, 678. [Google Scholar] [CrossRef]
- Kumar, A.R.; Premalatha, L. Optimal power flow for a deregulated power system using adaptive real coded biogeography-based optimization. Electr. Power Energy Syst. 2015, 73, 393–399. [Google Scholar] [CrossRef]
- Duman, S.; Güvenç, U.U.; Sönmez, Y.; Yörükeren, N. Optimal power flow using gravitational search algorithm. Energy Convers. Manag. 2012, 59, 86–95. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chattopadhyay, P.K. Application of biogeography-based optimisation to solve different optimal power flow problems. IET Gener. Trans. Distrib. 2011, 5, 70–80. [Google Scholar] [CrossRef]
- Abdelaziz, A.Y.; Ali, E.S.; Elazim, S.M.A. Combined economic and emission dispatch solution using Flower Pollination Algorithm. Electr. Power Energy Syst. 2016, 80, 264–274. [Google Scholar] [CrossRef]
- Reddy, S.S.; Bijwe, P.R.; Abhyankar, A.R. Faster evolutionary algorithm based optimal power flow using incremental variables. Electr. Power Energy Syst. 2014, 54, 198–210. [Google Scholar] [CrossRef]
- Roy, P.K.; Paul, C.C. Optimal power flow using krill herd algorithm. Int. Trans. Electr. Energy Syst. 2015, 8, 1397–1419. [Google Scholar] [CrossRef]
- Christy, A.A.; Raj, P.A.D.V. Adaptive biogeography based predator–prey optimization technique for optimal power flow. Electr. Power Energy Syst. 2014, 62, 344–352. [Google Scholar] [CrossRef]
- Matpower MATLAB Toolbox. Available online: http://www.pserc.cornell.edu//matpower/ (accessed on 8 May 2016).
- Jadhav, H.T.; Bamane, P.D. Temperature dependent optimal power flow using g-best guided artificial bee colony algorithm. Electr. Power Energy Syst. 2016, 77, 77–90. [Google Scholar] [CrossRef]
- Chaib, A.E.; Bouchekara, H.R.E.H.; Mehasni, R.; Abido, M.A. Optimal power flow with emission and non-smooth cost functions using backtracking search optimization algorithm. Electr. Power Energy Syst. 2016, 81, 64–77. [Google Scholar] [CrossRef]
Figure 1.
Flowchart of the improved krill herd algorithm (IKHA) algorithm with novel constraint method for optimal power flow (OPF) problem.
Figure 1.
Flowchart of the improved krill herd algorithm (IKHA) algorithm with novel constraint method for optimal power flow (OPF) problem.

Figure 2.
The optimal convergence curves for Case 1 of IEEE 30 bus system.

Figure 3.
The results’ distribution for Case 1 of IEEE 30 bus system.

Figure 4.
The optimal convergence curves for Case 1-a and Case 1-b.

Figure 5.
Comparison of voltage profiles between Case 1 and Case 2.

Figure 6.
The optimal convergence curves for Case 2 of IEEE 30 bus system.

Figure 7.
The optimal convergence curves for Case 3 of IEEE 30 bus system.

Figure 8.
The results’ distribution for Case 3 of IEEE 30 bus system.

Figure 9.
The optimal convergence curves for Case 4 of IEEE 30 bus system.

Figure 10.
The results’ distribution for Case 4 of IEEE 30 bus system.

Figure 11.
The optimal convergence curves of fuel cost and voltage magnitude deviation for Case 5.

Figure 12.
The optimal convergence curves of fuel cost and transmission real power losses for Case 6.
Figure 12.
The optimal convergence curves of fuel cost and transmission real power losses for Case 6.

Figure 13.
The optimal convergence curves for Case 7 of IEEE 57 bus system.

Figure 14.
The results’ distribution for Case 7 of IEEE 57 bus system.

Figure 15.
Comparison of voltage profiles between Case 7 and Case 8.

Figure 16.
The optimal convergence curves of fuel cost and voltage magnitude deviation for Case 9.

Figure 17.
The optimal convergence curves for Case 10 of IEEE 118 bus system.

Figure 18.
The results’ distribution for Case 10 of IEEE 118 bus system.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Summary of the studied cases.
| Test System | Name | Objective Function | Constraints |
|---|---|---|---|
| IEEE 30 | Case 1 | Quadratic fuel cost function | Equality/non-equality |
| Case 1-a | Fuel cost function with multiple fuel sources | Equality/non-equality | |
| Case 1-b | Fuel cost function with valve point effect | Equality/non-equality | |
| Case 2 | Voltage magnitude deviation | Equality/non-equality | |
| Case 3 | Fuel cost emission | Equality/non-equality | |
| Case 4 | Transmission real power losses | Equality/non-equality | |
| Case 5 | Quadratic cost considering voltage deviation | Equality/non-equality | |
| Case 6 | Quadratic cost considering power losses | Equality/non-equality | |
| IEEE 57 | Case 7 | Quadratic fuel cost function | Equality/non-equality |
| Case 8 | Voltage magnitude deviation | Equality/non-equality | |
| Case 9 | Quadratic cost considering voltage deviation | Equality/non-equality | |
| IEEE 118 | Case 10 | Quadratic fuel cost function | Equality/non-equality |
Table 2.
Parameter values of improved krill herd algorithm (IKHA) and krill herd algorithm (KHA).
| Algorithm | NP | gmax | Nmax | Vf | Dmax | Ct |
|---|---|---|---|---|---|---|
| IKHA | 30 | 500 | 0.01 | 0.02 | 0.005 | 0.4/0.7 |
| KHA | 30 | 500 | 0.01 | 0.02 | 0.005 | 0.4 |
Table 3.
Optimal solutions obtained by IKHA on IEEE 30 system.
| Control Variables | Case 1 | Case 1-a | Case 1-b | Case 2 | Case 3 | Case 4 | Case 5 | Case 6 |
|---|---|---|---|---|---|---|---|---|
| P1 (MW) | 177.0460 | 139.9931 | 199.2307 | 53.7862 | 64.0580 | 51.4880 | 176.4745 | 102.5066 |
| P2 (MW) | 48.7423 | 54.9987 | 51.9824 | 79.8421 | 67.5612 | 79.9973 | 48.8341 | 55.6717 |
| P5 (MW) | 21.3782 | 24.1051 | 15.0001 | 49.8070 | 50.0000 | 50.0000 | 21.6357 | 38.0835 |
| P8 (MW) | 21.3084 | 34.9883 | 10.0001 | 34.7705 | 35.0000 | 35.0000 | 22.0723 | 34.9998 |
| P11 (MW) | 11.9203 | 18.4108 | 10.0002 | 30.0000 | 30.0000 | 29.9998 | 12.2127 | 29.9980 |
| P13 (MW) | 12.0020 | 17.6480 | 12.0002 | 39.0733 | 40.0000 | 40.0000 | 12.0005 | 26.6695 |
| V1 (p.u.) | 1.0827 | 1.0734 | 0.9784 | 1.0054 | 1.0636 | 1.0609 | 1.0409 | 1.0675 |
| V2 (p.u.) | 1.0635 | 1.0593 | 0.9607 | 1.0070 | 1.0575 | 1.0569 | 1.0244 | 1.0571 |
| V5 (p.u.) | 1.0325 | 1.0341 | 0.9799 | 1.0189 | 1.0381 | 1.0377 | 1.0127 | 1.0338 |
| V8 (p.u.) | 1.0374 | 1.0401 | 0.9631 | 1.0114 | 1.0444 | 1.0441 | 1.0010 | 1.0421 |
| V11 (p.u.) | 1.0897 | 1.0972 | 1.0992 | 0.9880 | 1.0877 | 1.0805 | 1.0428 | 1.0773 |
| V13 (p.u.) | 1.0470 | 1.0411 | 0.9831 | 1.0049 | 1.0487 | 1.0564 | 0.9920 | 1.0511 |
| T11 (p.u.) | 1.0400 | 1.0300 | 0.9000 | 1.0000 | 1.0800 | 1.0800 | 1.0600 | 1.0500 |
| T12 (p.u.) | 0.9300 | 0.9800 | 0.9000 | 0.9000 | 0.9000 | 0.9000 | 0.9000 | 0.9100 |
| T15 (p.u.) | 0.9700 | 0.9700 | 1.1000 | 0.9700 | 0.9800 | 0.9900 | 0.9500 | 0.9900 |
| T36 (p.u.) | 0.9700 | 0.9700 | 0.9200 | 0.9500 | 0.9700 | 0.9800 | 0.9600 | 0.9800 |
| QC10 (p.u.) | 0.0020 | 0.0440 | 0.0480 | 0.0500 | 0.0000 | 0.0060 | 0.0500 | 0.0010 |
| QC12 (p.u.) | 0.0130 | 0.0440 | 0.0430 | 0.0000 | 0.0070 | 0.0000 | 0.0130 | 0.0430 |
| QC15 (p.u.) | 0.0410 | 0.0460 | 0.0050 | 0.0500 | 0.0440 | 0.0430 | 0.0500 | 0.0460 |
| QC17 (p.u.) | 0.0500 | 0.0350 | 0.0450 | 0.0000 | 0.0500 | 0.0500 | 0.0000 | 0.0500 |
| QC20 (p.u.) | 0.0390 | 0.0400 | 0.0120 | 0.0500 | 0.0390 | 0.0400 | 0.0500 | 0.0390 |
| QC21 (p.u.) | 0.0500 | 0.0460 | 0.0000 | 0.0500 | 0.0500 | 0.0500 | 0.0500 | 0.0500 |
| QC23 (p.u.) | 0.0280 | 0.0410 | 0.0470 | 0.0500 | 0.0280 | 0.0290 | 0.0500 | 0.0280 |
| QC24 (p.u.) | 0.0500 | 0.0480 | 0.0100 | 0.0500 | 0.0500 | 0.0500 | 0.0500 | 0.0500 |
| QC29 (p.u.) | 0.0220 | 0.0190 | 0.0040 | 0.0070 | 0.0190 | 0.0240 | 0.0170 | 0.0260 |
| Fuel cost | 800.4143 | 646.5126 | 929.901 | 965.5317 | 944.3314 | 967.6201 | 803.5879 | 859.0579 |
| Voltage deviations | 0.9215 | 0.9256 | 0.6826 | 0.0892 | 0.9226 | 0.8814 | 0.0984 | 0.9083 |
| Emission | 0.3660 | 0.2835 | 0.4410 | 0.2077 | 0.204818 | 0.2073 | 0.3642 | 0.2287 |
| Power loss | 8.9972 | 6.7439 | 14.8136 | 3.8792 | 3.2192 | 3.0850 | 9.8297 | 4.5291 |
Table 4.
Comparison of the simulation results for Case 1 on IEEE 30 system.
| Algorithms | Min ($/h) | Simulation Time (s)/gmax |
|---|---|---|
| IKHA | 800.4143 | 75.11/500 |
| KHA | 801.4675 | 74.06/500 |
| MSLFA [30] | 802.2870 | NA/100 |
| ABC [31] | 800.6600 | 130.16/200 |
| MSA [22] | 800.5099 | NA/100 |
| MGBICA [32] | 801.1409 | NA/NA |
| ARCBBO [34] | 800.5159 | NA/200 |
| Jaya [33] | 800.479 | 72.4/100 |
| GSA [35] | 798.6751 a | 10.7582/200 |
| BBO [36] | 799.1116 a | NA/200 |
a Infeasible solution.
Table 5.
Comparison of the simulation results for Case 1-a and Case 1-b on IEEE 30 system.
| Algorithms | Case 1-a Min ($/h) | Case 1-b Min ($/h) | Average Time (s)/gmax |
|---|---|---|---|
| IKHA | 646.5126 | 929.9010 | 80.75/500 |
| KHA | 647.0264 | 932.1784 | 78.22/500 |
| MSA [22] | 646.8364 | 930.7441 | NA/100 |
Table 6.
Comparison of the simulation results for Case 2 on IEEE 30 system.
| Algorithms | Min | Simulation Time (s)/gmax |
|---|---|---|
| IKHA | 0.0892 | 70.40/500 |
| KHA | 0.1029 | 68.02/500 |
| MGBICA [32] | 0.1239 | NA/NA |
| LTLBO [23] | 0.0974 | 20.17/100 |
| BBO [36] | 0.0951 | NA/200 |
Table 7.
Comparison of the simulation results for Case 3 on IEEE 30 system.
| Algorithms | Min (ton/h) | Simulation Time (s)/gmax |
|---|---|---|
| IKHA | 0.204818 | 76.68/500 |
| KHA | 0.205082 | 74.89/500 |
| DSA [9] | 0.2058255 | NA/500 |
| ABC [31] | 0.204826 | NA/200 |
| MSA [22] | 0.20482 | NA/100 |
| MGBICA [32] | 0.2048 | NA/NA |
| MSLFA [30] | 0.2056 | NA/100 |
Table 8.
Comparison of the simulation results for Case 4 on IEEE 30 system.
| Algorithms | Min (MW) | Simulation Time (s)/gmax |
|---|---|---|
| IKHA | 3.0805 | 72.32/500 |
| KHA | 3.1409 | 70.64/500 |
| ABC [31] | 3.1078 | NA/200 |
| Combined approach [28] | 3.2601 | 3.3109/NA |
| DSA [9] | 3.0945 | NA/500 |
| MSA [22] | 3.1005 | NA/100 |
| MGBICA [32] | 4.937 | NA/NA |
| Proposed EEA [38] | 3.2823 | 5.7167/94 |
| ALC-PSO [13] | 3.1700 | 10.2345/500 |
| Jaya [33] | 3.1035 | NA/100 |
Table 9.
Comparison of the simulation results for Case 5 on IEEE 30 system.
| Algorithms | Fuel Cost ($/h) | Voltage Deviations | Total | Time (s)/gmax |
|---|---|---|---|---|
| IKHA | 803.5879 | 0.0984 | 813.4279 | 78.36/500 |
| KHA | 803.8889 | 0.0987 | 813.7589 | 75.68/500 |
| PSOGSA [29] | 804.43123 | 0.09638 | 814.06923 | NA/200 |
| The proposed KHA [39] | 804.6337 | 0.0996 | 814.5937 | NA/100 |
| ABPPO [40] | 804.7339 | 0.09232 | 813.9659 | NA/300 |
| MSA [22] | 803.3125 | 0.10842 | 814.1545 | NA/100 |
| LTLBO [23] | 803.7431 | 0.0974 | 813.4831 | 20.17/100 |
| GABC [24] | 803.5785 | 0.1007 | 813.6485 | 2.98/100 |
| ICBO [12] | 803.3978 | 0.1014 | 813.5378 | NA/500 |
Table 10.
Comparison of the simulation results for Case 6 on IEEE 30 system.
| Algorithms | Fuel Cost ($/h) | Power Loss (MW) | Total | Simulation Time (s)/gmax |
|---|---|---|---|---|
| IKHA | 859.0579 | 4.5291 | 1040.2219 | 77.29/500 |
| KHA | 859.4961 | 4.5246 | 1040.4801 | 75.04/500 |
| MSA [22] | 859.1915 | 4.5404 | 1040.8075 | NA/100 |
| MDE [22] | 868.7138 | 4.3891 | 1044.2778 | NA/100 |
| PSOGSA [29] | 822.40631 | 5.46816 | 1041.13271 | NA/200 |
| ABPPO [40] | 822.7693 | 5.452 | 1040.8493 | NA/300 |
Table 11.
Optimal solutions obtained on IEEE 57 system.
| Control Variables | Case7 | Case8 | Case9 | ||
|---|---|---|---|---|---|
| IKHA | IKHA | IKHA | DSA [9] | MSA [22] | |
| P1 (MW) | 143.0334 | 355.4995 | 142.8777 | 142.6780 | 143.8661 |
| P2 (MW) | 85.3299 | 2.3831 | 88.5835 | 89.6450 | 85.34818 |
| P3 (MW) | 44.8387 | 124.4492 | 45.1741 | 45.6795 | 45.85493 |
| P6 (MW) | 75.1387 | 86.9520 | 70.3558 | 73.1394 | 71.30797 |
| P8 (MW) | 461.8476 | 212.7213 | 460.6468 | 461.7316 | 462.4092 |
| P9 (MW) | 95.0960 | 99.1914 | 96.7565 | 92.1106 | 94.08068 |
| P12 (MW) | 360.3747 | 387.2737 | 361.9443 | 361.4796 | 363.8543 |
| V1 (p.u.) | 1.0528 | 1.0082 | 1.0269 | 1.0212 | 1.022121 |
| V2 (p.u.) | 1.0494 | 1.0001 | 1.0246 | 1.0740 | 1.019646 |
| V3 (p.u.) | 1.0455 | 1.0125 | 1.0185 | 1.0646 | 1.013444 |
| V6 (p.u.) | 1.0581 | 1.0032 | 1.0313 | 0.9913 | 1.025691 |
| V8 (p.u.) | 1.0748 | 1.0086 | 1.0505 | 1.0519 | 1.044968 |
| V9 (p.u.) | 1.0587 | 1.0192 | 1.0312 | 1.0808 | 1.014033 |
| V12 (p.u.) | 1.0397 | 1.0232 | 1.0115 | 1.0103 | 1.010858 |
| T4-18 (p.u.) | 1.0449 | 0.9935 | 0.9690 | 0.9688 | 0.9101725 |
| T4-18 (p.u.) | 0.9495 | 0.9472 | 0.9901 | 0.9952 | 1.075124 |
| T21-20 (p.u.) | 1.0223 | 0.9765 | 0.9933 | 1.0248 | 0.9854176 |
| T24-25 (p.u.) | 0.9577 | 1.0504 | 0.9640 | 1.0010 | 0.9872317 |
| T24-25 (p.u.) | 1.0798 | 1.0465 | 1.0665 | 1.0025 | 1.053424 |
| T24-26 (p.u.) | 1.0190 | 0.9985 | 1.0179 | 0.9452 | 1.016568 |
| T7-29 (p.u.) | 0.9970 | 0.9985 | 1.0059 | 0.9000 | 1.00709 |
| T34-32 (p.u.) | 0.9672 | 0.9237 | 0.9405 | 0.9443 | 0.9348021 |
| T11-41 (p.u.) | 0.9028 | 0.9000 | 0.9005 | 0.9542 | 0.900021 |
| T15-45 (p.u.) | 0.9712 | 0.9317 | 0.9624 | 0.9772 | 0.9479471 |
| T14-46 (p.u.) | 0.9616 | 0.9740 | 0.9611 | 0.9252 | 0.9608689 |
| T10-51 (p.u.) | 0.9795 | 1.0097 | 0.9799 | 0.9665 | 0.9781408 |
| T13-49 (p.u.) | 0.9355 | 0.9013 | 0.9343 | 1.0116 | 0.9182851 |
| T11-43 (p.u.) | 0.9833 | 0.9648 | 0.9610 | 0.9343 | 0.9509346 |
| T40-56 (p.u.) | 0.9945 | 1.0188 | 1.0210 | 1.0130 | 0.9941227 |
| T39-57 (p.u.) | 0.9605 | 0.9010 | 0.9274 | 0.9861 | 0.9361633 |
| T9-55 (p.u.) | 1.0093 | 1.0186 | 1.0098 | 1.0214 | 0.998129 |
| QC18 (p.u.) | 0.1037 | 0.0025 | 0.0667 | 0.1095 | 0.1188253 |
| QC25 (p.u.) | 0.1437 | 0.1890 | 0.1648 | 0.1370 | 0.1678665 |
| QC53 (p.u.) | 0.1243 | 0.2889 | 0.1482 | 0.1326 | 0.1828455 |
| Fuel cost ($/h) | 41,663.3910 | 48,834.0293 | 41,697.5456 | 41,699.4 | 41,714.9851 |
| V-deviatios | 1.5494 | 0.5520 | 0.7233 | 0.7620 | 0.67818 |
| Total | 41,818.3310 | 48,889.22930 | 41,769.8815 | 41,775.6 | 41,782.8031 |
Table 12.
Comparison of the simulation results for Case 7 on IEEE 57 system.
| Algorithms | Min ($/h) | Simulation Time (s)/gmax |
|---|---|---|
| IKHA | 41,663.3910 | 136.34/500 |
| KHA | 41,687.8183 | 130.85/500 |
| MSA [22] | 41,673.7231 | NA/NA |
| LTLBO [23] | 41,679.5451 | NA/150 |
| ICBO [12] | 41,697.3324 | NA/1500 |
| DSA [9] | 41,686.82 | NA/500 |
| ARCBBO [34] | 41,686 | NA/500 |
| GABC [42] | 41,684.2011 | NA/100 |
Table 13.
Optimal solutions obtained by IKHA for Case 10 on IEEE 118 system.
| Variables | Value | Var. | Value | Var. | Value | Var. | Value | Var. | Value |
|---|---|---|---|---|---|---|---|---|---|
| PG4 | 75.5892 | PG65 | 1.1061 | PG116 | 2.6329 | V61 | 1.0136 | V112 | 1.0220 |
| PG6 | 2.3944 | PG66 | 346.5375 | V1 | 0.9873 | V62 | 1.0103 | V113 | 0.9817 |
| PG8 | 13.2117 | PG69 | 311.5309 | V4 | 1.0092 | V65 | 1.0497 | V116 | 1.0243 |
| PG10 | 1.8752 | PG70 | 2.5131 | V6 | 0.9970 | V66 | 1.0292 | T8-5 | 0.0960 |
| PG12 | 350.2058 | PG72 | 0.3332 | V8 | 0.9740 | V69 | 0.9943 | T26-25 | 0.1070 |
| PG1 | 82.1866 | PG73 | 2.9797 | V10 | 0.9918 | V70 | 1.0007 | T30-17 | 0.1000 |
| PG18 | 5.6590 | PG74 | 79.1184 | V12 | 0.9949 | V72 | 1.0113 | T38-37 | 0.1010 |
| PG19 | 55.9071 | PG76 | 26.5457 | V15 | 0.9646 | V73 | 1.0440 | T63-59 | 0.1010 |
| PG24 | 6.0264 | PG77 | 47.3801 | V18 | 0.9688 | V74 | 0.9738 | T64-61 | 0.1020 |
| PG25 | 2.9631 | PG80 | 410.2660 | V19 | 0.9628 | V76 | 0.9415 | T65-66 | 0.1020 |
| PG26 | 182.0172 | PG85 | 53.3588 | V24 | 1.0099 | V77 | 0.9617 | T68-69 | 0.1080 |
| PG27 | 253.7070 | PG87 | 7.1808 | V25 | 1.0084 | V80 | 0.9765 | T81-80 | 0.1040 |
| PG31 | 24.5511 | PG89 | 440.0013 | V26 | 1.0130 | V85 | 0.9786 | QC5 | 0.4000 |
| PG32 | 8.1844 | PG90 | 0.5161 | V27 | 1.0219 | V87 | 0.9654 | QC34 | 0.0000 |
| PG34 | 4.8480 | PG91 | 0.1538 | V31 | 0.9965 | V89 | 1.0127 | QC37 | 0.0500 |
| PG36 | 12.1483 | PG92 | 35.7542 | V32 | 1.0063 | V90 | 0.9842 | QC44 | 0.0000 |
| PG40 | 0.3641 | PG99 | 0.6210 | V34 | 0.9659 | V91 | 0.9894 | QC45 | 0.1000 |
| PG42 | 22.5623 | PG100 | 182.5943 | V36 | 0.9593 | V92 | 0.9893 | QC46 | 0.0500 |
| PG46 | 45.1902 | PG103 | 34.1980 | V40 | 0.9612 | V99 | 0.9465 | QC48 | 0.1500 |
| PG49 | 18.9517 | PG104 | 24.3619 | V42 | 0.9970 | V100 | 0.9761 | QC74 | 0.1200 |
| PG54 | 187.8779 | PG105 | 74.1968 | V46 | 1.0045 | V103 | 0.9798 | QC79 | 0.1000 |
| PG55 | 49.2065 | PG107 | 0.8261 | V49 | 1.0119 | V104 | 0.9770 | QC82 | 0.1500 |
| PG56 | 48.1089 | PG110 | 55.5449 | V54 | 1.0201 | V105 | 0.9818 | QC83 | 0.1000 |
| PG59 | 26.1531 | PG111 | 32.5718 | V55 | 1.0154 | V107 | 1.0051 | QC105 | 0.0000 |
| PG61 | 94.0442 | PG112 | 0.4718 | V56 | 1.0152 | V110 | 1.0039 | QC107 | 0.0000 |
| PG62 | 135.9548 | PG113 | 0.2558 | V59 | 1.0106 | V111 | 1.0078 | QC110 | 0.0600 |
| Fuel cost ($/h) | 131,427.2636 | ||||||||
| PG1(MW) | 442.1525 | ||||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Chen, G.; Lu, Z.; Zhang, Z. Improved Krill Herd Algorithm with Novel Constraint Handling Method for Solving Optimal Power Flow Problems. Energies 2018, 11, 76. https://doi.org/10.3390/en11010076
AMA Style
Chen G, Lu Z, Zhang Z. Improved Krill Herd Algorithm with Novel Constraint Handling Method for Solving Optimal Power Flow Problems. Energies. 2018; 11(1):76. https://doi.org/10.3390/en11010076
Chicago/Turabian StyleChen, Gonggui, Zhengmei Lu, and Zhizhong Zhang. 2018. "Improved Krill Herd Algorithm with Novel Constraint Handling Method for Solving Optimal Power Flow Problems" Energies 11, no. 1: 76. https://doi.org/10.3390/en11010076
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.