Reactive Power Dispatch Optimization with Voltage Profile Improvement Using an Efficient Hybrid Algorithm †


1
QUERE Laboratory, Electrical Engineering Department, University Ferhat Abbas Setif 1, Setif 19000, Algeria
2
QUERE Laboratory, Optics and fine mechanics Institute, University Ferhat Abbas Setif 1, Setif 19000, Algeria
3
LAMIH-UMR CNRS, University of Valenciennes, 59313 Valenciennes, France
*
Author to whom correspondence should be addressed.
†
The present work is an extension of the paper “Hybrid PSO-tabu Search for the Optimal Reactive Power Dispatch Problem” presented at the IECON 2014-40th Annual Conference of the IEEE Industrial Electronics Society, 29 October–1 November 2014, Dallas, TX, USA.
Energies 2018, 11(8), 2134; https://doi.org/10.3390/en11082134
Submission received: 12 July 2018
/
Revised: 12 August 2018
/
Accepted: 13 August 2018
/
Published: 16 August 2018
(This article belongs to the Special Issue Optimization Methods Applied to Power Systems)
Abstract
:This paper presents an efficient approach for solving the optimal reactive power dispatch problem. It is a non-linear constrained optimization problem where two distinct objective functions are considered. The proposed approach is based on the hybridization of the particle swarm optimization method and the tabu-search technique. This hybrid approach is used to find control variable settings (i.e., generation bus voltages, transformer taps and shunt capacitor sizes) which minimize transmission active power losses and load bus voltage deviations. To validate the proposed hybrid method, the IEEE 30-bus system is considered for 12 and 19 control variables. The obtained results are compared with those obtained by particle swarm optimization and a tabu-search without hybridization and with other evolutionary algorithms reported in the literature.
1. Introduction
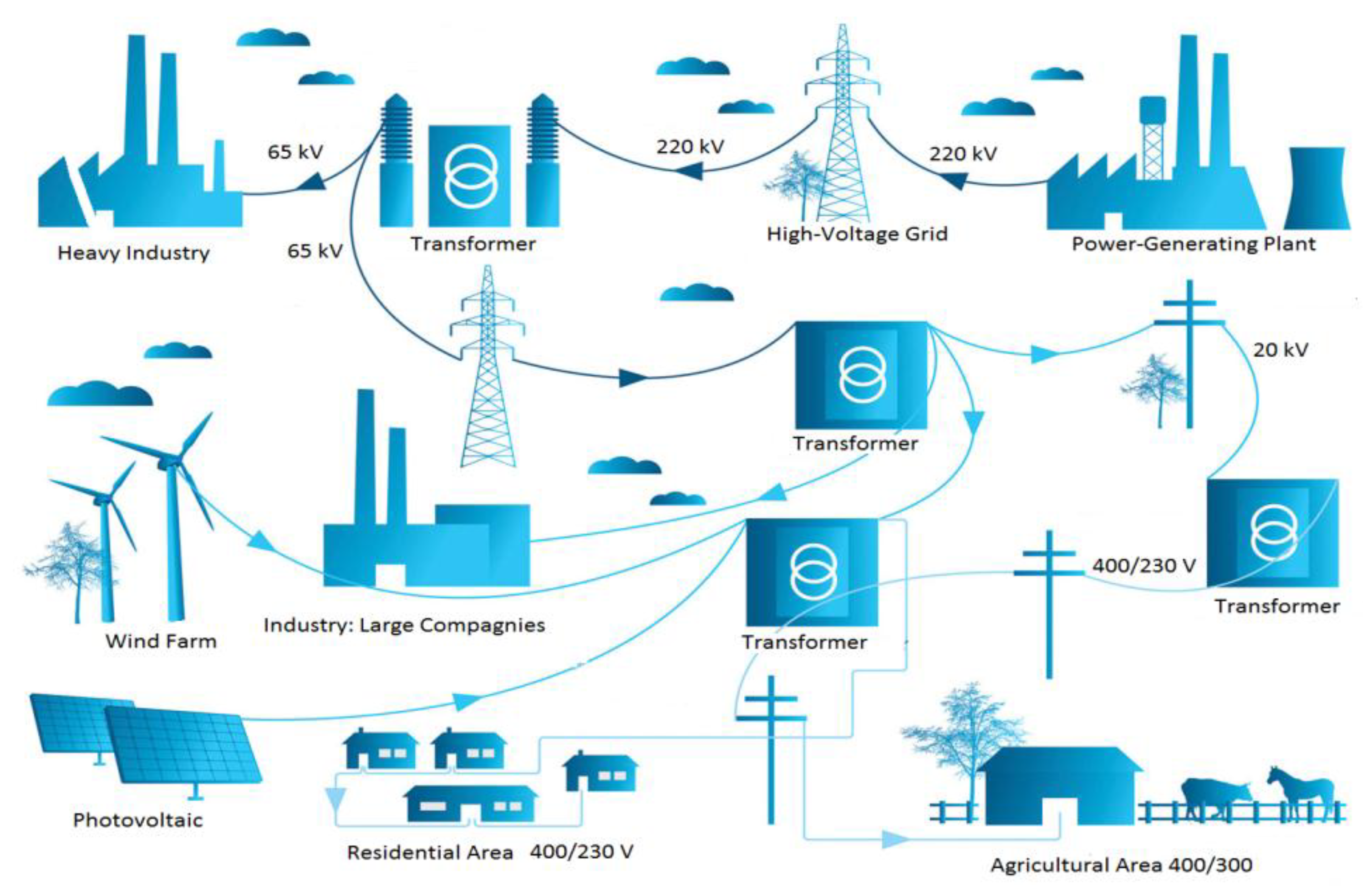
Power systems are complex networks (Figure 1) used for generating and transmitting electric power, which is expected to consume minimal resources while providing maximum security and reliability. Optimal reactive power dispatch (ORPD) is a specific optimal power flow (OPF) problem that has a significant influence on the secure and economic operation of power systems [1,2]. The objectives of ORPD in power systems are to minimize active power losses and to improve the voltage profile by minimizing the load bus voltage deviations while satisfying a given set of operating and physical constraints. The ORPD then provides optimal control variable settings such as (generator bus voltages, output of static reactive power compensators, transformer tap-settings, shunt capacitors, etc.) [3,4]. Due to its significant influence on the secure and economic operation of power systems, ORPD has attracted increasing interest from electric power suppliers. Many approaches for solving the ORPD problem have been described in the literature: initially, several classical optimization methods such as the gradient-based approach [5,6], linear programming [7], non-linear programming [8,9], quadratic programming [10], and interior point [11], were used to solve this problem. However, these methods have some disadvantages in solving complex ORPD problems, namely, premature convergence properties, algorithmic complexity and the local minima trap [12]. In order to overcome these drawbacks, researchers have applied evolutionary and meta-heuristic algorithms such as the genetic algorithm (GA) [13], differential evolution (DE) [14,15,16], evolutionary programming (EP) [17], stud krill herd algorithm (SKHA) [18], whale optimization algorithm (WOA) [19], backtracking search algorithm (BSA) [20], Jaya Algorithm [21], moth-flame optimization (MFO) [22], symbiotic organism search (SOS) [23] and particle swarm optimization (PSO) [24,25]. PSO, in particular, has received increased attention from researchers because of its novelty and searching capability. It was developed through simulation of a simplified social system and has been found to be robust in solving continuous non-linear optimization problems [1]. Generally, PSO has a more global searching ability at the beginning of the run and a local search near the end of the run [1]. The PSO technique can generate high-quality solutions and has a more stable convergence characteristic than other stochastic methods. However, when solving complex multimodal problems, PSO can be trapped in local optima [26]. To overcome this drawback, PSO performance can be enhanced with few adjustments. Hybridization is one of these modifications or techniques which, nowadays, is a popular idea being applied to evolutionary algorithms in order to increase their efficiency and robustness [27].
Recently, hybrid PSO has provided promising results for problems such as the power loss minimization problem [28]. The novelty of this paper is that an efficient hybrid PSO with the tabu search (PSO-TS) method is implemented to solve the ORPD problem with two distinct objective functions, namely, active power loss minimization and the sum of the load bus voltage deviations. The proposed optimization approach was tested on an IEEE 30-bus system considering two case studies. To demonstrate the effectiveness of the proposed PSO-TS algorithm, the obtained results were compared with TS, PSO and with several methods published in the literature, namely:
- Biogeography Based Optimization (BBO) technique: This method has been developed based on the theory of biogeography which is nature’s way of distributing species. It is mainly based on migration and mutation [29].
- Differential Evolution (DE) algorithm: Similar to the genetic algorithm, the DE algorithm is a population-based algorithm that uses crossover, mutation and selection operators [14].
- General passive congregation PSO (GPAC), local passive congregation PSO (LPAC) and coordinated aggregation (CA) are a development of the PSO algorithm using recent advances in swarm intelligence. GPAC and LPAC algorithms are based on the global and local-neighborhood variant PSOs, respectively, and the CA technique is based on the coordinated aggregation observed in swarms [28].
- CLPSO method introduces learning strategy in PSO. In this method, for each particle, besides its own best particle (pbest), other particles’ pbests are used as exemplars. Each particle learns from all potential particles’ pbests in the swarm [9].
- Interior point (IP) method is a conventional technique based on the primal-dual algorithm [11].
This paper is organized as follows: In Section 2, a brief description and mathematical formulation of optimal reactive power dispatch (ORPD) problem are provided. The hybrid PSO-tabu search approach is described in Section 3 along with a short description of the PSO algorithm and tabu search method. Simulation results and comparison with other methods are given in Section 4. Finally, a conclusion with future works is outlined in Section 5.
2. ORPD Problem Formulation
ORPD is a highly constrained non-linear optimization problem in which a specific objective function is to be minimized while satisfying a number of nonlinear equality and inequality constraints. The objectives of the reactive power dispatch problem considered here are to minimize separately the whole system active power losses (Ploss) and the sum of the load bus voltage deviations (SVD) with the intention of improving the voltage profile of the power system. These objectives are achieved by proper adjustment of the control variables like generator voltage magnitudes, shunt capacitor sizes and transformer tap settings. The ORPD problem can be then stated as follows [14]:
For the power loss minimization:
For the voltage deviation minimization:
where:
- J1(x,u) and J2(x,u) are the transmission active power losses and SVD objective functions, respectively.
- g and h are the set of equality and inequality constraints, respectively.
- x is the state or dependent variables vector.
- u is the control or independent variables vector.
In this study, all control variables have been considered as continuous variables. The following sections outline this problem by detailing the objective functions.
2.1. Objective Functions
2.1.1. Power Losses Minimization
The first objective to be minimized is the system transmission active power losses. This objective function is expressed as follows [1]
where:
- NL is the number of transmission lines.
- Vi and Vj are the voltage magnitude at buses i and j, respectively.
- is the conductance of branch k between buses i and j.
- is the voltage angle difference between bus i and bus j.
The elements of the state variables vector “x” are load buses voltage (VL), generators reactive power output (QG) and lines apparent power flow (SL). The control variables vector “u” includes the generation buses voltage (VG), the transformer tap settings (T) and the shunt VAR compensators (QC).
Accordingly, the x vector can be written as follows:
where NG is the number of generators; NPQ is the number of PQ buses (load buses);
u can be expressed as:
where:
- NT is the number of tap regulating transformers.
- NC is the number of shunt VAR compensations.
2.1.2. Minimization of Voltage Deviation
The bus voltage is one of the most important security and service quality indices. Improving the voltage profile can be achieved by minimizing the load buses voltage deviation, which is modeled as follows [29]:
where:
- VLi is the voltage magnitude at load bus i.
- Vref is the voltage reference value which is equal to 1 p.u.
2.2. Problem Constraints
The considered objective functions for the ORPD problem are subject to several equality and inequality constraints [1] which will be detailed below.
2.2.1. Equality Constrains
These constraints reflect the physical laws governing the electrical system known as power flow equations. They are the expression of the balance between load demand (power loss included) and generated power. The power flow equations are given by:
where:
- PGi, QGi are the respective active and reactive power of the ith generator.
- PDi, QDi are the respective active and reactive power demand at bus i.
- NB is the total number of buses; Bij, Gij are real and imaginary parts of (i,j)th element of the bus admittance matrix.
2.2.2. Inequality Constraints.
Inequality Constraints on Security Limits
Some limits are imposed for security purposes:
- Active power generated at slack bus
- Load bus voltage
- Generated reactive power
- Thermal limits: the apparent power flowing in line “L” must not exceed the maximum allowable apparent power flow value ()
Inequality Constraints on Control Variable Limits
The different control variables are bounded as follows:
- Generator voltage limits
- Transformer tap limits
- Shunt capacitor limits
where:
- PG,slack is the real power generation at slack bus.
- VGi is the voltage magnitude at generator bus i.
- Ti is the tap ratio of transformer i.
- Qci is the reactive power compensation source at bus i.
- NPQ is the number of PQ bus.
- (.)max and (.)minare the upper and lower the limits of the considered variables, respectively.
The objective functions, equality and inequality constraints are non-linear functions and they depend upon control variables. Therefore, ORPD is a constrained non-linear optimization problem with multiple local minima [30]. The equality constraints given by Equations (7) and (8) are met by solving the load-flow problem. The inequality constraints given by Equations (13)–(15) should be maintained during the solution evolution, while the inequality Equations (9)–(12) should be handled by additional techniques.
3. Proposed Hybrid Algorithm
Hybridization is a way of combining two techniques in a judicious manner, so that the resulting algorithm contains positive features of both algorithms [27]. The success of the meta-heuristics optimization algorithms depends to a large extent on the careful balance between two conflicting goals: exploration (diversification) and exploitation (intensification) [27]. In order to achieve these two goals, the algorithms use either local search techniques, global search approaches, or an integration of both, commonly known as hybrid methods [27]. For the ORPD problem, different hybridizations with PSO have been used to improve the algorithm’s performance by avoiding premature convergence. For instance, PSO has been hybridized with the linear interior point method [31], fuzzy logic [32,33], Pareto optimal set [34], direct search method [35], differential evolution [36], a multi-agent systems [1], imperialist competitive algorithm [37], genetic algorithm [38] and eagle strategy [39]. Tabu search was used to solve OPF [40] and optimal reactive power planning [41] problems, but to the best of our knowledge, the hybridization of TS with PSO has never been used even though it was effective in solving other optimization-constrained problems [42]. Both algorithms (PSO, TS) and their hybridization (PSO-TS) for solving the ORPD problem are discussed in the following sections.
3.1. Particle Swarm Optimization
The concept of PSO was first suggested by Kennedy and Eberhart in 1995 [43]. PSO is a population-based evolutionary computation technique. The main idea is to evolve the population (particles) of initial solutions in a search space in order to find the best solution. This evolution is an analogy of the behavior of some species as they look for food, like a flock of birds or a school of fish [44]. These particles move through the search domain with a specified velocity in search of optimal solution. Each particle maintains a memory which helps it to keep track of its previous best position. The positions of the particles are distinguished as personal best and global best.
The swarm of particles evolves in the search space by modifying their velocities according to the following equations [27]:
where:
- is the current velocity of particle i at iteration k.
- is the inertia weight.
- rand is a random number between 0 and 1.
- and are the acceleration coefficients.
- is the best position of the current particle achieved so far.
- is the global best position achieved by all informants.
- is the current position of particle i at iteration k.
The new position of each particle is given by the following equation:
The inertia weighting factor for the velocity of particle i is defined by the inertial weight approach [28].
where:
- itermax is the maximum number of iterations.
- k is the current number of iteration.
- wmax and wmin are the upper and lower limits of the inertia weighting factor, respectively.
The efficiency of PSO has been proved for a wide range of optimization problems. However, constrained non-linear optimization problems have not been widely studied with this method. Hu and Eberhart were the first to try to adapt PSO to constrained non-linear problems [45]. The difficulty in adapting meta-heuristics mainly involves the question of how to preserve the feasibility of solutions during different iterations.
A variety of approaches can be used to deal with feasibility in constrained non-linear optimization problems, which largely fall into two classes:
- Penalty function approaches, and
- Approaches preserving feasibility throughout evolutionary computation,
Each method has its advantages and disadvantages. A penalty function approach is used in this paper due to its simplicity of implementation and its proven efficiency for many constrained non-linear optimization problems [46]. Conversely, feasibility preserving methods are highly time-consuming. To use a penalty function method, a penalty factor associated with each violated constraint is added to the objective function in order to penalize infeasible solutions [47]. Therefore, the optimum is found when all the constraints are respected and the objective function is minimized. The ORPD objective function is then modified as follows [48]:
where F is equal to J1 given by Equation (3) in the case of the power losses minimization or equal to J2 given by Equation (6) in the case of the voltage deviations minimization; KP, KV, KQ and KS are the penalty factors of the slack bus generator, bus voltage limit violation, generator reactive power limit violation, and line flow violation, respectively.
, , and are defined as follows:
3.2. Tabu Search Method
In 1986, Fred Glover proposed a new approach, called “tabu search” (TS). TS is a meta-heuristic that guides a local heuristic search procedure to explore the solution space beyond local optimality. This technique uses an operation called “move” to define the neighborhood of any given solution. One of the main components of TS is its use of adaptive memory, which creates a more flexible search behavior [49,50]. The simplest of these processes consists of recording in a tabu list the features of the visited regions in the space search, which provides a means to avoid revisiting already inspected solutions and thus avoid becoming trapped in local optima. Generally, the advantages of the TS optimization technique can be summarized as follows [40]:
- TS is characterized by its ability to avoid entrapment in a local optimal solution and to prevent the same solution being found by using the flexible memory of the search history.
- TS uses probabilistic transition rules to make decisions, rather than deterministic ones. Hence, TS is a kind of stochastic optimization algorithm that can search a complicated and uncertain area to find the global optimum. This makes TS more flexible and robust than conventional methods.
- TS uses adaptive memory processes for guiding the seeking in the problem search space. Therefore, it can easily deal with non-smooth, non-continuous and non-differentiable objective functions.
3.3. Hybrid PSO-Tabu Search Approach Applied to ORPD
Several arguments support the hybridization of PSO with TS. Firstly, PSO is a global population-based algorithm while TS proposes fast local search mechanism. Secondly, the incorporation of TS into PSO enables the algorithm to maintain population diversity. Finally, TS is integrated to prevent PSO from falling into local optima. To this end, TS is proposed to serve as a local optimizer of the best local solutions (pbest). The pbest solutions of PSO are the inputs of the TS diversification procedure. For each solution “s”, a list of neighborhoods is defined. Candidate solutions from these neighborhoods are examined and the best one becomes the new current solution that replaces “s”. The move leading to the solution “s” is saved in the tabu list, called best_list. This process is repeated to produce successive new solutions until a defined stopping criterion is satisfied.
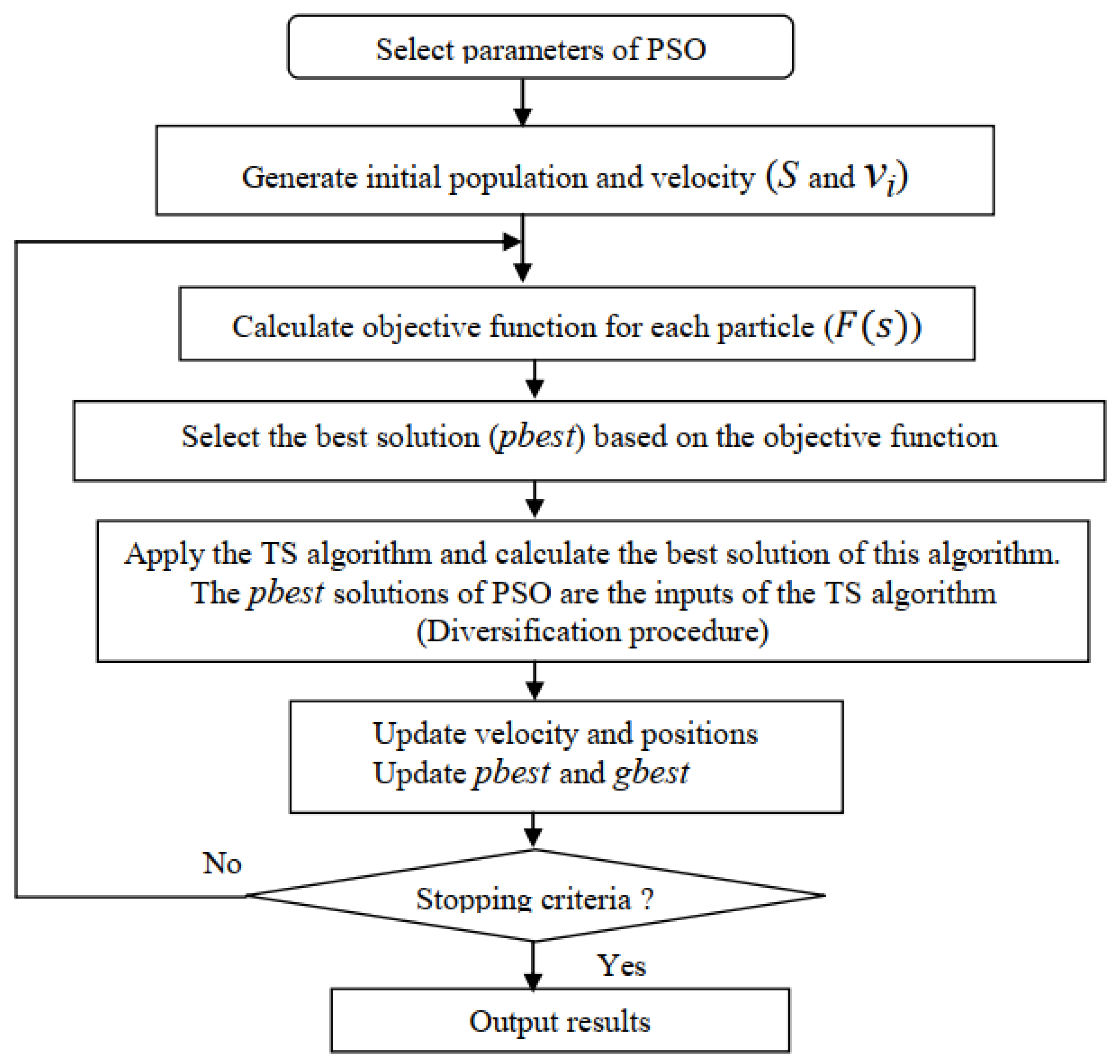
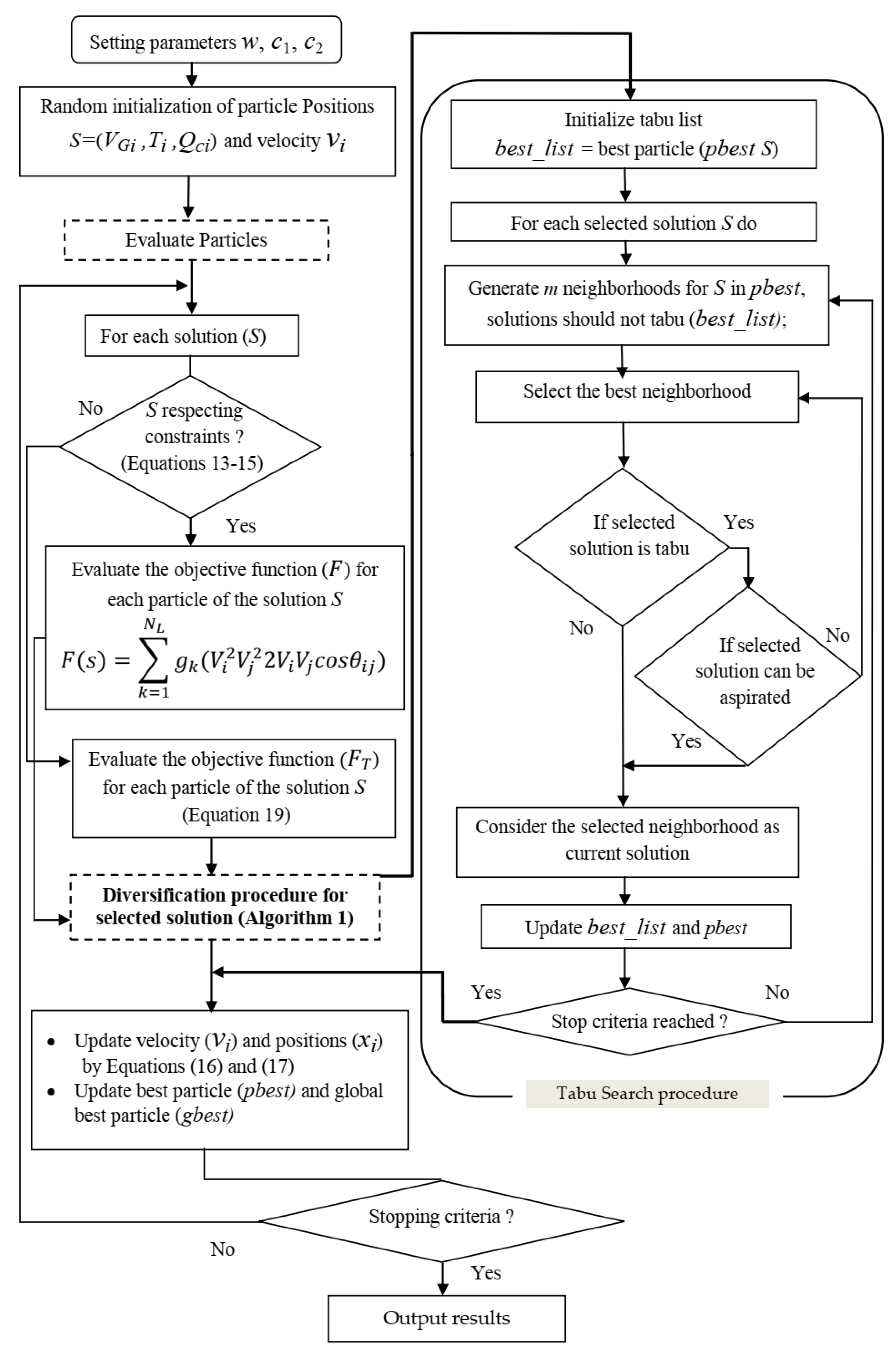
The neighborhoods of a solution “s” are defined by hyper-rectangles introduced in [51]. A hyper-rectangle of “s” with a radius “r” is the space containing solutions (s’) such that the distance between s and (s’) is less than “r”. To generate m neighbors for the solution “s”, m hyper-rectangles centered on “s” are created, and a point is randomly chosen from each of them. The best of the m chosen points then replaces “s”. The search procedure of PSO-TS algorithm will terminate whenever the predetermined maximum number of generations is reached, or whenever the global best solution does not improve over a predetermined number of iterations. The diversification procedure is outlined in Algorithm 1 while, the general and detailed flowcharts of the proposed PSO-tabu search are given in Figure 2 and Figure 3, respectively.
| Algorithm 1 Tabu search procedure (Diversification) |
| Inputs pbest; // best historical solution of particles pbestval; solutions values m; //neighborhood size r; //radius of hyper-rectangles eps; //threshold for accepting new solution best_list = ( pbest, r); // Initializing the tabu list best_list Repeat For each solution s(VGi ,Ti ,Qci) in pbest //generation of m neighbors i = 1 While i <= m Generate the hyper-rectangle of radius r*i around s, choose randomly a solution NS in the hyper- rectangle If NS ∉ best_list then add the move to best_list; if eval(NS)-pbestval(s) ≤ eps then update pbestval and pbest s = NS, End if i = i + 1; End While Until (stoping criteria) |
4. Application and Results
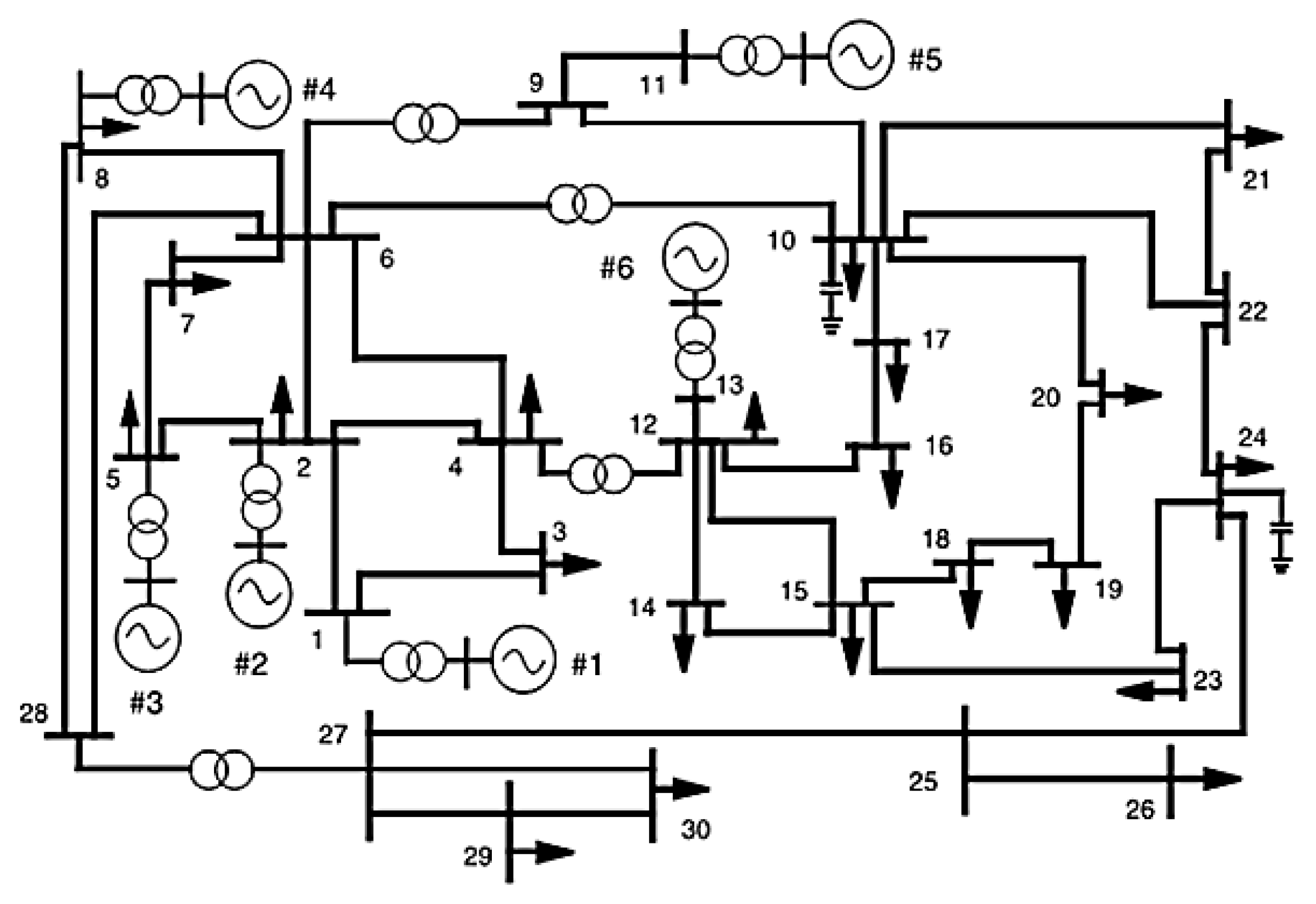
In this study, the proposed PSO-TS based reactive power optimization approach was applied to an IEEE 30-bus power system (Figure 4). For the purpose of comparison, two reactive power injection schemes have been considered:
For both cases, two objective functions are considered: active power loss (Equation (3)) and bus voltage deviation (Equation (6)). In the study, all inequality constraints (Equations (9)–(15)) were taken into consideration. This is significantly different from related studies where only part of the inequality constraints is considered. The simulations were carried out using Matlab 7.3 on a Pentium® 3.4 GHz computer with 1 GB total memory. The PSO-TS parameter selection is a challenging task not only for this algorithm but also for other meta-heuristic algorithms. The parameter settings used in the proposed PSO-TS algorithm are determined through extensive experiments, including initial inertia weight, acceleration factors, number of generations, swarm size, tabu list length, total number of neighborhood and radius of neighborhood. Based on these results, the control parameter settings shown in Table 1 have been used in the proposed PSO-TS algorithm and for all simulation studies in both objective functions.
4.1. Case 1: IEEE 30 Bus with 12 Control Variables
This system contains six generator units connected to buses 1, 2, 5, 8, 11 and 13; four regulating transformers connected between the line numbers 6–9, 6–10, 4–12 and 27–28; and two shunt compensators connected to bus numbers 10 and 24. The transmission feeder numbers is of 41. The transmission line data and loads were taken from [52] and are shown in the Appendix A (Table A1 and Table A2). The generator voltages, transformer tap settings and VAR injection of the shunt capacitors were considered as control variables. The voltage magnitudes of all the buses were between 0.95 and 1.1 p.u, the transformer tap settings were within the range of 0.9–1.1 p.u and the shunt capacitor sizes were within the interval of 0 to 30 MVAR [28]. There are 12 control variables in this case, namely, 6 generator voltages, 4 transformer taps and 2 capacitor banks. Two objective functions are considered in order to demonstrate the effectiveness of the proposed algorithm. The proposed PSO-TS algorithm is used to minimize separately the system active power losses and the voltage deviation of all load buses.
4.1.1. Power Loss Minimization
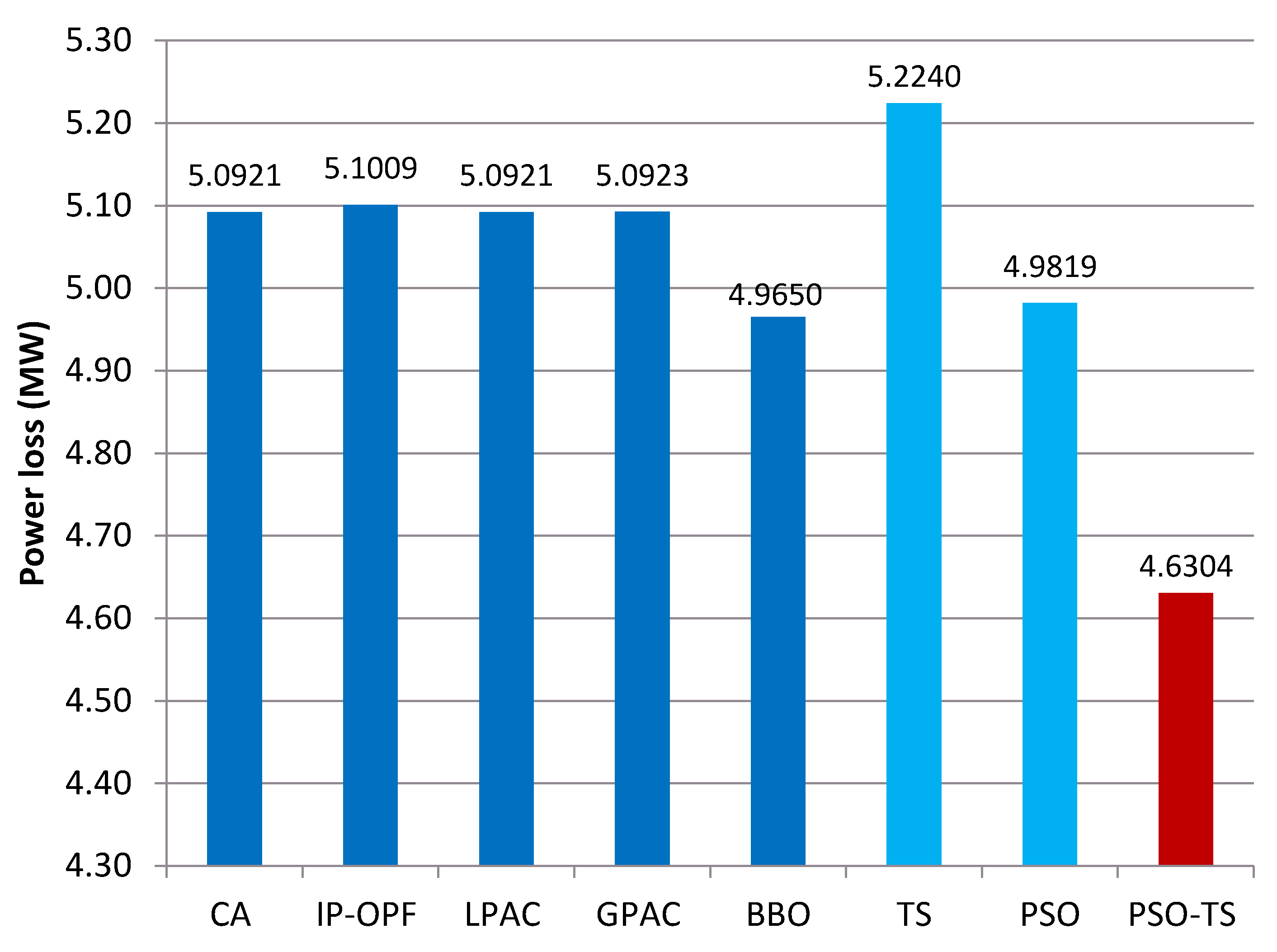
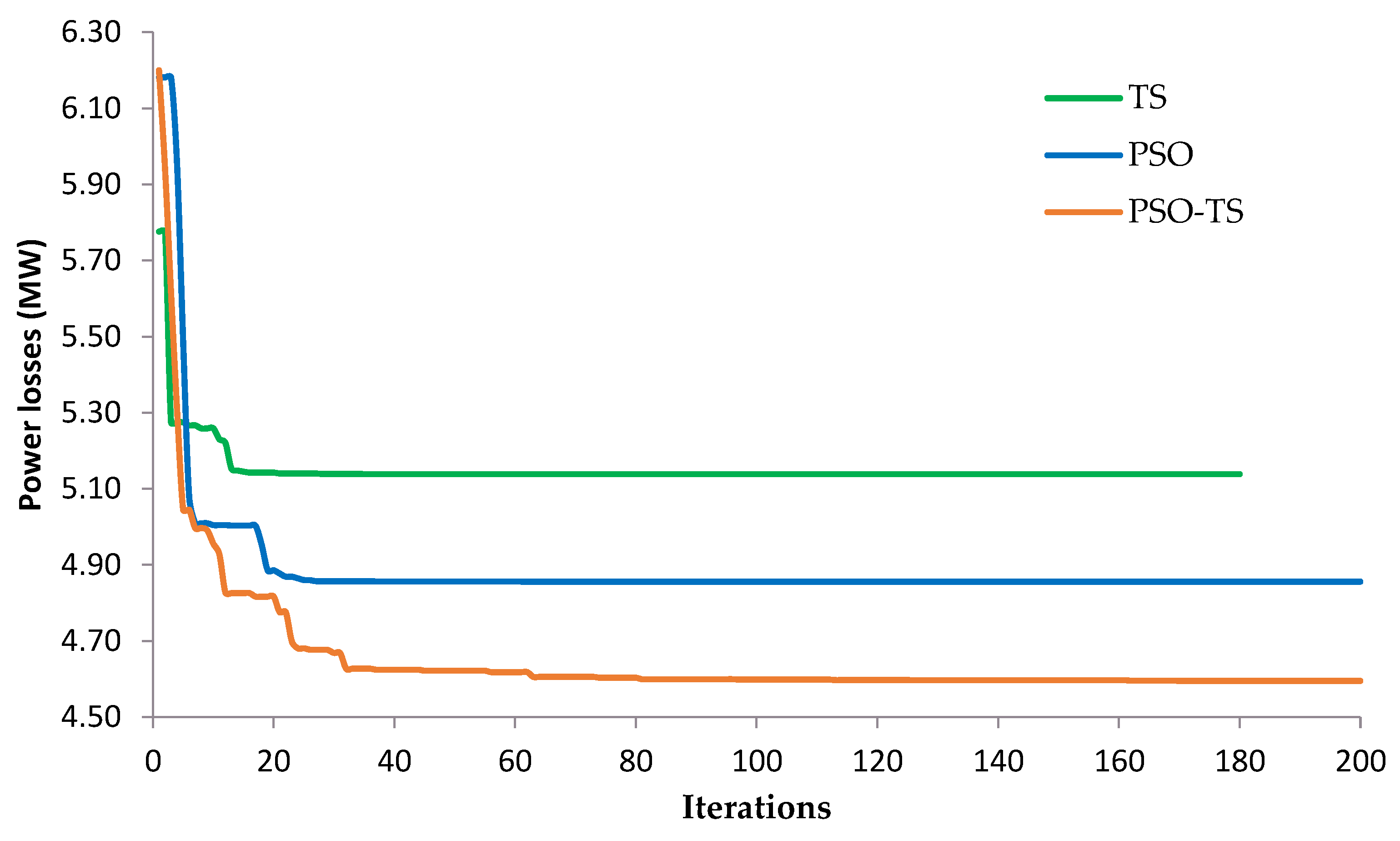
The objective in this case is to minimize the total active power losses. Before minimization, the total power losses were 5.2783 MW. Table 2 summarize the results of the optimal settings and the system power losses obtained by the proposed PSO-TS approach, each of the two our techniques PSO and TS considered alone and different methods reported in [28,29], namely, CA, IP-OPF, LPAC, GPAC and BBO. These results show that the dispatch optimal solutions determined by the PSO-TS led to better results. Active power losses are lower than those found by TS, PSO and considered reference. Using PSO-TS algorithm, power losses range from 5.2783 MW to 4.6304 MW, indicating a reduction of 12.27%, while PSO and TS taken alone reduce power losses by only 1.03% and 5.61%, respectively. For the other optimization algorithms, the best result is given by BBO algorithm [29] which reduces the losses by 5.93%. It can be concluded that the proposed PSO-TS method is able to determine the near-global optimal solution. At the same time, the proposed method succeeded in keeping the dependent variables within their limits. Figure 5 shows the supremacy of PSO-TS algorithm over the other methods. The convergence characteristics of power loss objective function for this case are plotted in Figure 6. As the hardware and the software environments significantly affect the computational time, it is not possible to compare the computational time requirements of the different methods unless all the methods are run on the same hardware and programmed using the same environment. As a rough guide, however, the average time taken by PSO-TS in this case is 19 s.
4.1.2. Voltage Deviation Minimization
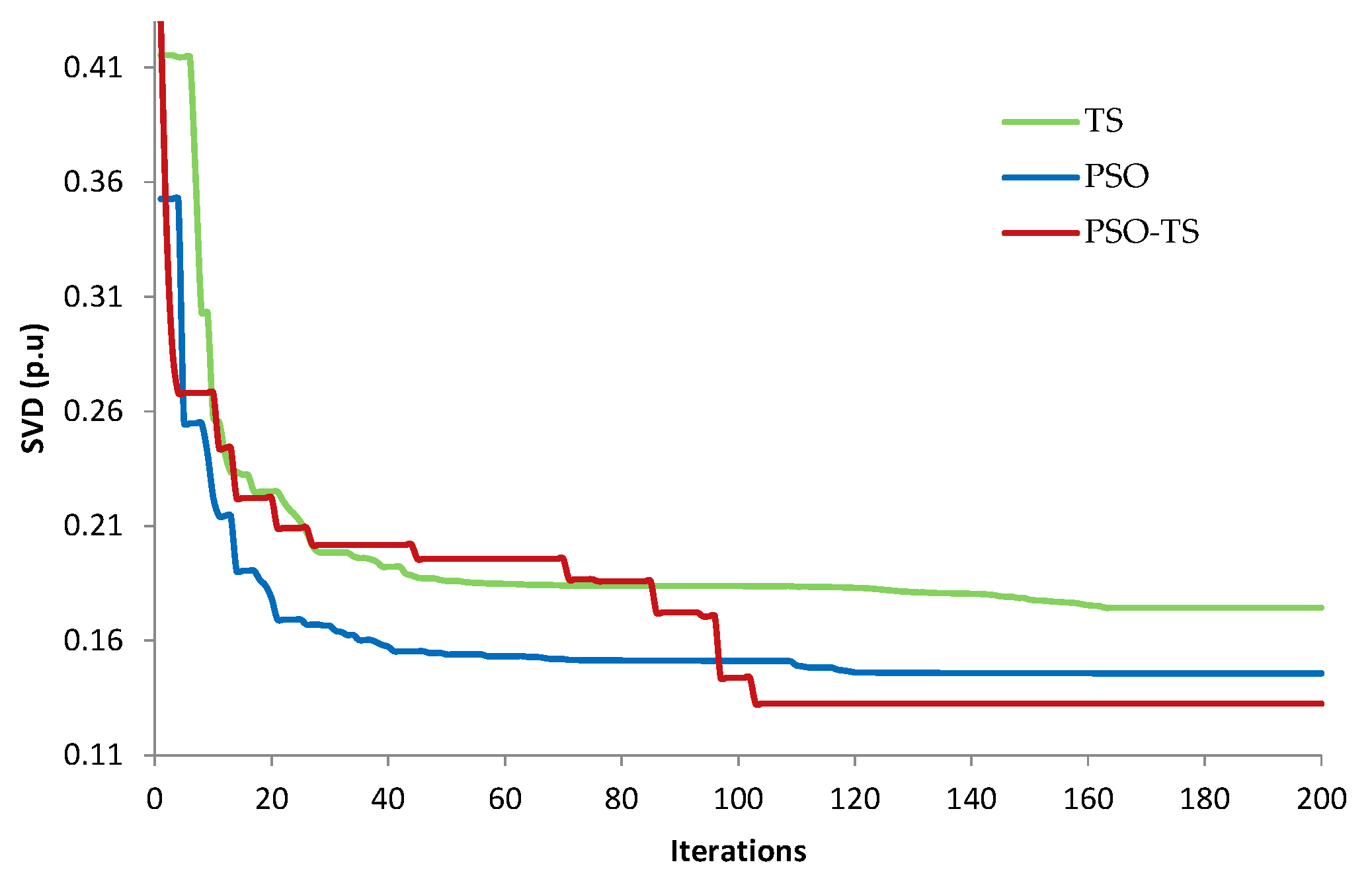
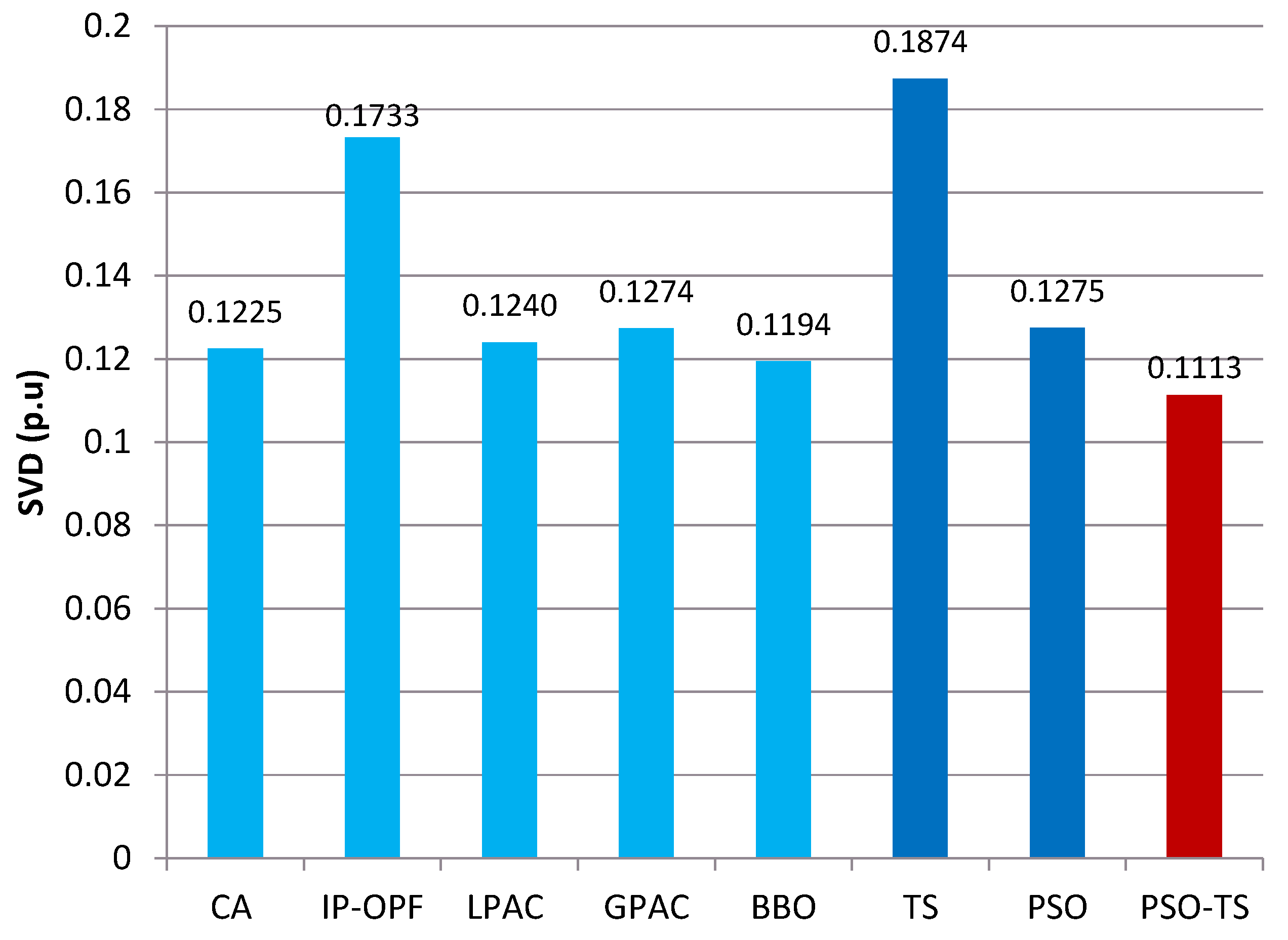
The objective in this case is the minimization of the voltage deviations in order to improve the system voltage profile. The SVD and the optimal setting of control variables obtained by our PSO, TS, PSO-TS and different considered methods (CA, IP-OPF LPAC, GPAC and BBO) are listed in Table 3. The convergence characteristics of the objective BBOe function obtained by TS, PSO and PSO-TS are illustrated in Figure 7. Before minimization, the SVD was 0.619 p.u. As shown in Table 3, the obtained SVD using the proposed PSO-TS hybrid approach is 0.1113 p.u which means a reduction of 82.02% while the ones given by the mentioned methods are, respectively, 80.21%, 79.97%, 79.42%, 80.71%, 69.73% and 79.40%. These results clearly indicate that PSO-TS outperforms other methods in term of solution quality (see Figure 8).
4.2. Case 2: IEEE 30 Bus with 19 Control Variables
In this case, the IEEE 30-bus system includes six generation buses, 24 load buses and 41 branches; 4 of them have tap-changing transformer as in the first case. In addition, buses 10, 12, 15, 17, 20, 21, 23, 24 and 29 were selected for receiving shunt capacitors. This IEEE 30-bus test system included 19 control variables. The constraint limits of the generator voltage magnitude and the tap settings of the regulating transformers are the same as those used in the first case. The capacitor sizes are considered as continuous variables and they must take their values from the interval of 0–5 MVAR. The transmission line data and the loads were taken from [6]. The active and reactive total loads are Pload = 2.834 p.u and Qload = 1.262 p.u.
4.2.1. Power Losses Minimization
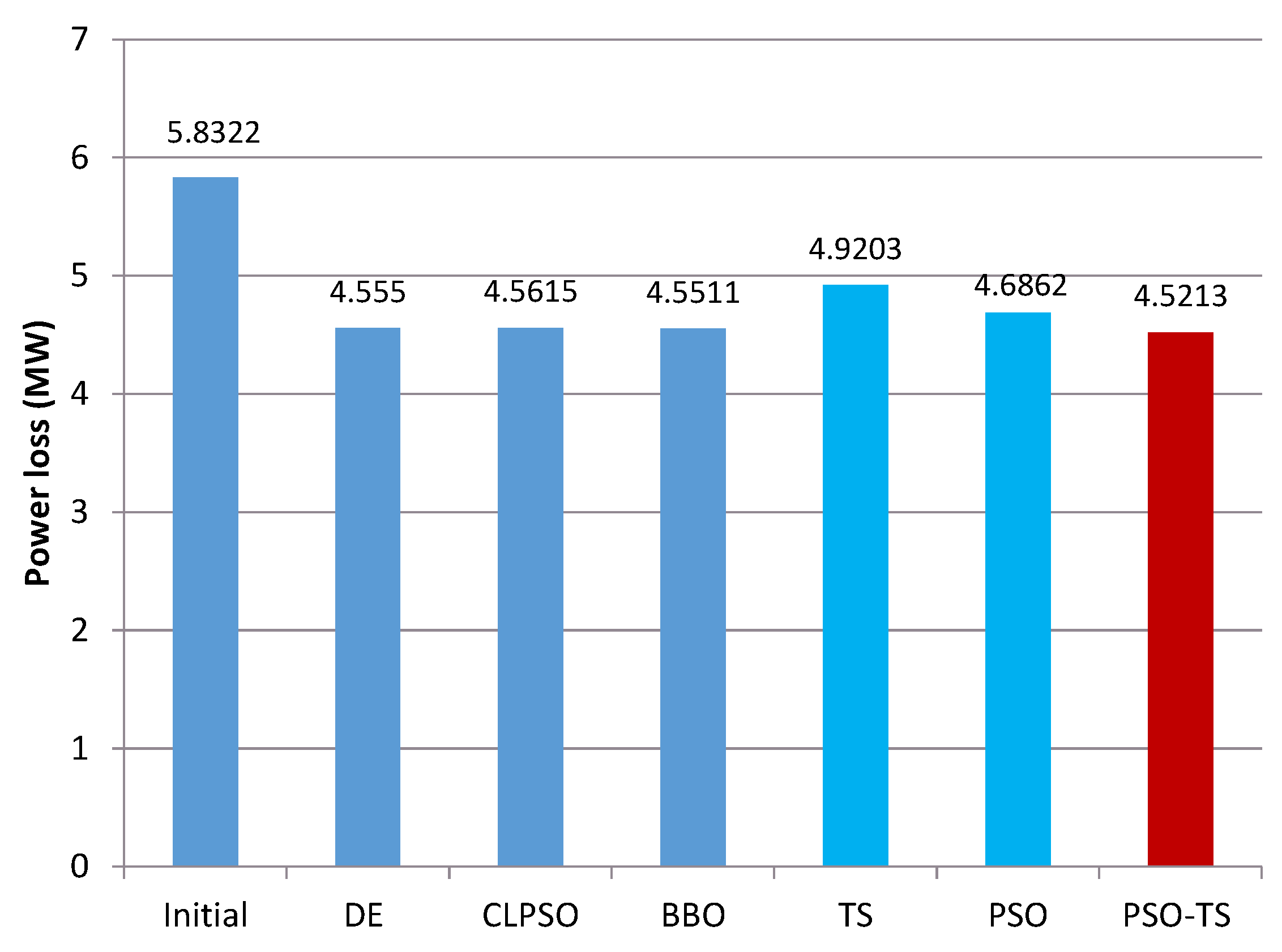
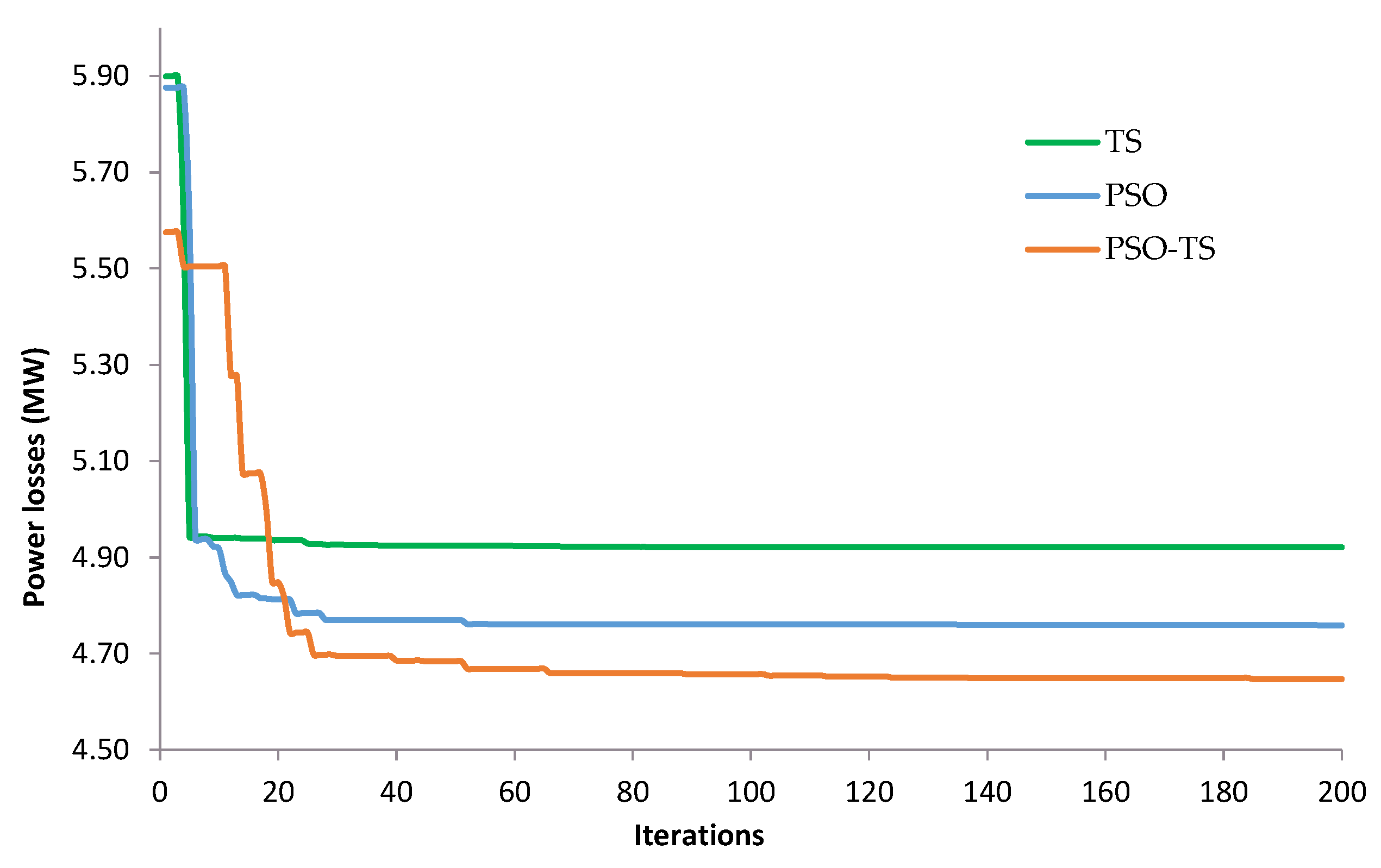
To demonstrate the superiority of the proposed algorithm in the minimization of transmission power losses (J1), Table 4 shows the PSO-TS simulation results compared with those reported in the literature such as DE [14], BBO [48], and comprehensive learning PSO (CLPSO) [9]. The initial conditions for all these methods were the same and were taken from [6]. The total active power loss was initially 5.8322 MW, reduced to 4.5213 MW by the proposed method, i.e., a reduction in power losses by 22.48%. As shown in Figure 9, the proposed PSO-TS algorithm outperforms the cited meta-heuristic methods. Figure 10 shows the convergence characteristics of TS, PSO and PSO-TS approaches.
4.2.2. Voltage Deviation Minimization
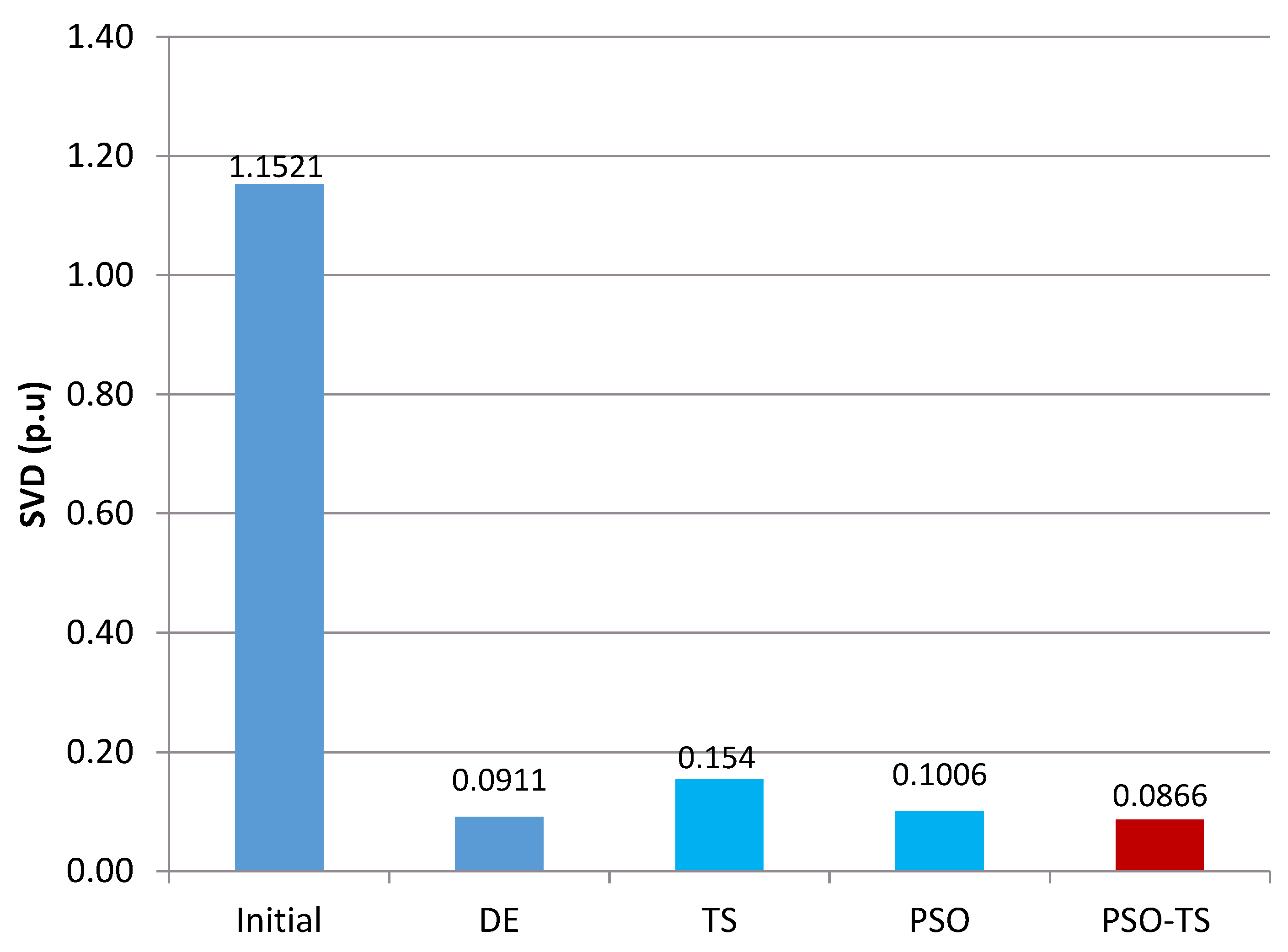
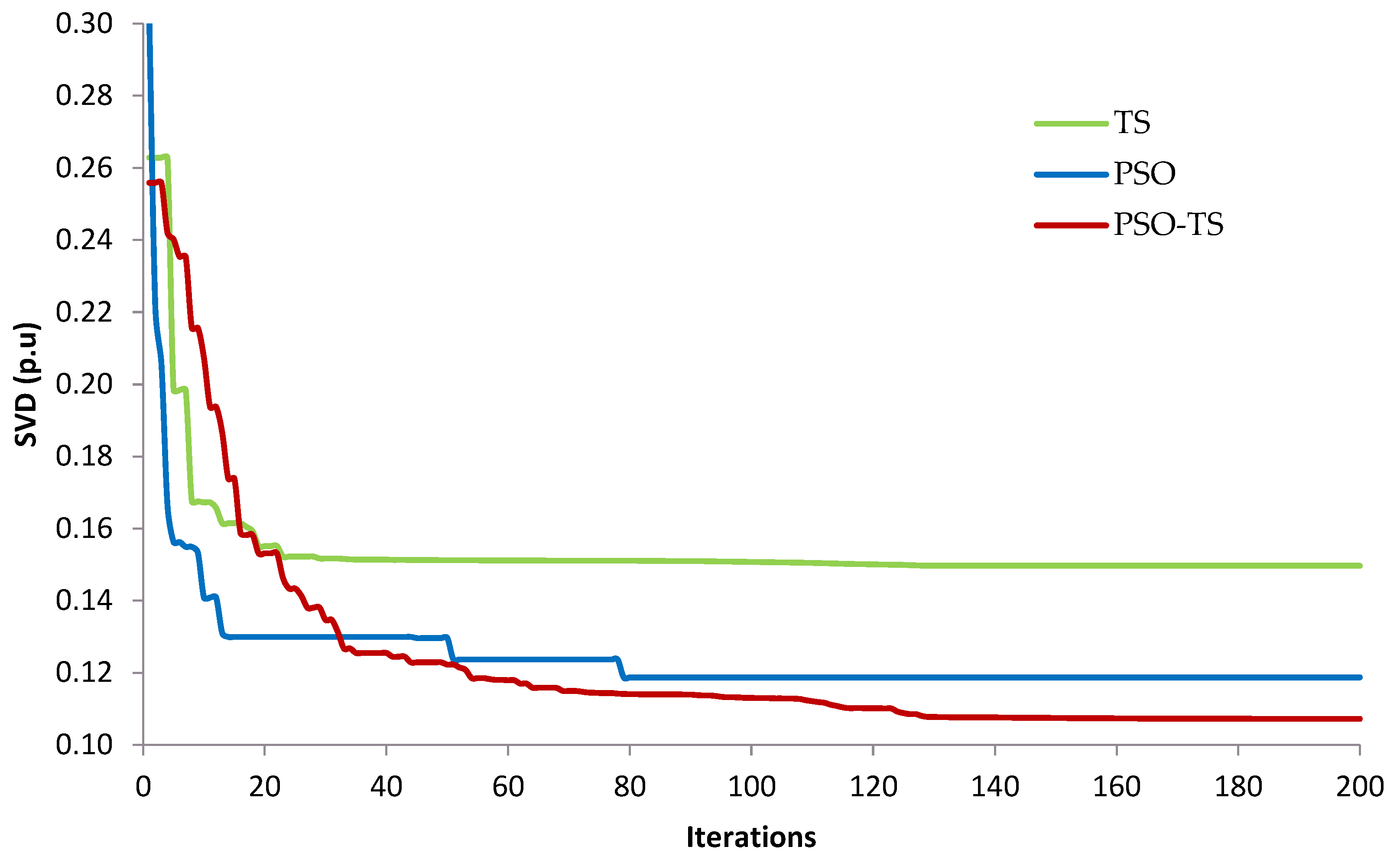
The SVD minimization has also been tested using the PSO-TS proposed method on the IEEE 30 bus with 19 control variables. The optimal control variables settings and the SVD obtained by the different methods are shown in Table 5. These results show that the optimal solutions determined by PSO-TS lead to lower SVD than those found by TS, PSO and DE (Figure 11). The PSO-TS algorithm has reduced the SVD from the initial state at 1.1521 p.u to 0.0866 p.u, representing a reduction of 92.48% compared with TS, PSO and DE, which reduced SVD by 86.63%, 91.27%, and 92.09%, respectively. This shows that the PSO-TS is well capable of determining the global or near-global optimum solution. The proposed method succeeded also in keeping the dependent variables within their limits. Figure 12 gives the SVD evolution over iterations of TS, PSO and PSO-TS methods.
5. Conclusions
In this paper, a hybrid PSO-tabu search algorithm was proposed and successfully applied as a solution to the optimal reactive power dispatch problem. This problem was formulated as a highly constrained non-linear optimization problem where all realistic constraints were taken into consideration, including security inequalities, such as thermal constraints and real power generation constraint at the slack bus. To demonstrate the superiority of the proposed PSO-TS approach, simulation results were compared with TS, PSO and with various techniques available in the literature, such as CA, IP-OPF, LPAC, GPAC, BBO, DE and CLPSO. These simulation results show that the proposed PSO-TS algorithm gives superior solutions compared with these optimization techniques implemented using the same case studies. The presented results are very encouraging and indicate that the implementation of PSO-TS could be effective for solving the optimal power dispatch problem.
Future research should focus on analyzing other hybridization techniques in order to integrate discrete variables. Moreover, power network systems require optimizing more objectives at the same time, thus multi-objective optimization will be considered a future target.
Author Contributions
All the authors have contributed to this work including the production of the idea, the development of the algorithm, the analysis and interpretation of the results and finally the editing of the paper.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Transmission line date of IEEE 30-bus system.
| Bus No. | Bus No. | R (p.u) | X (p.u) | B/2 (p.u) | Bus No. | Bus No. | R (p.u) | X (p.u) | B/2 (p.u) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 0.0192 | 0.0575 | 0.0264 | 15 | 18 | 0.1073 | 0.2185 | 0 |
| 1 | 3 | 0.0452 | 0.1852 | 0.0204 | 18 | 19 | 0.0639 | 0.1292 | 0 |
| 2 | 4 | 0.0570 | 0.1737 | 0.0184 | 19 | 20 | 0.0340 | 0.0680 | 0 |
| 3 | 4 | 0.0132 | 0.0379 | 0.0042 | 10 | 20 | 0.0936 | 0.2090 | 0 |
| 2 | 5 | 0.0472 | 0.1983 | 0.0209 | 10 | 17 | 0.0324 | 0.0845 | 0 |
| 2 | 6 | 0.0581 | 0.1763 | 0.0187 | 10 | 21 | 0.0348 | 0.0749 | 0 |
| 4 | 6 | 0.0119 | 0.0414 | 0.0045 | 10 | 22 | 0.0727 | 0.1499 | 0 |
| 5 | 7 | 0.0460 | 0.1160 | 0.0102 | 21 | 22 | 0.0116 | 0.0236 | 0 |
| 6 | 7 | 0.0267 | 0.0820 | 0.0085 | 15 | 23 | 0.1000 | 0.2020 | 0 |
| 6 | 8 | 0.0120 | 0.0420 | 0.0045 | 22 | 24 | 0.1150 | 0.1790 | 0 |
| 6 | 9 | 0 | 0.2080 | 0 | 23 | 24 | 0.1320 | 0.2700 | 0 |
| 6 | 10 | 0 | 0.5560 | 0 | 24 | 25 | 0.1885 | 0.3292 | 0 |
| 9 | 11 | 0 | 0.2080 | 0 | 25 | 26 | 0.2544 | 0.3800 | 0 |
| 9 | 10 | 0 | 0.1100 | 0 | 25 | 27 | 0.1093 | 0.2087 | 0 |
| 4 | 12 | 0 | 0.2560 | 0 | 28 | 27 | 0 | 0.3960 | 0 |
| 12 | 13 | 0 | 0.1400 | 0 | 27 | 29 | 0.2198 | 0.4153 | 0 |
| 12 | 14 | 0.1231 | 0.2559 | 0 | 27 | 30 | 0.3202 | 0.6027 | 0 |
| 12 | 15 | 0.0662 | 0.1304 | 0 | 29 | 30 | 0.2399 | 0.4533 | 0 |
| 12 | 16 | 0.0945 | 0.1987 | 0 | 8 | 28 | 0.0636 | 0.2000 | 0.0214 |
| 14 | 15 | 0.2210 | 0.1997 | 0 | 6 | 28 | 0.0169 | 0.0599 | 0.0650 |
| 16 | 17 | 0.0824 | 0.1923 | 0 |
Table A2.
Load data of IEEE 30-bus system.
| Bus No. | Active Load (p.u) | Reactive Load (p.u) | Bus No. | Active Load (p.u) | Reactive Load (p.u) |
|---|---|---|---|---|---|
| 1 | 0.0000 | 0.0000 | 16 | 0.0350 | 0.0180 |
| 2 | 0.2170 | 0.1270 | 17 | 0.0900 | 0.0580 |
| 3 | 0.0240 | 0.0120 | 18 | 0.0320 | 0.0090 |
| 4 | 0.0760 | 0.0160 | 19 | 0.0950 | 0.0340 |
| 5 | 0.9420 | 0.1900 | 20 | 0.0220 | 0.0070 |
| 6 | 0.0000 | 0.0000 | 21 | 0.1750 | 0.1120 |
| 7 | 0.2280 | 0.1090 | 22 | 0.0000 | 0.0000 |
| 8 | 0.3000 | 0.3000 | 23 | 0.0320 | 0.0160 |
| 9 | 0.0000 | 0.0000 | 24 | 0.0870 | 0.0670 |
| 10 | 0.0580 | 0.0200 | 25 | 0.0000 | 0.0000 |
| 11 | 0.0000 | 0.0000 | 26 | 0.0350 | 0.0230 |
| 12 | 0.1120 | 0.0750 | 27 | 0.0000 | 0.0000 |
| 13 | 0.0000 | 0.0000 | 28 | 0.0000 | 0.0000 |
| 14 | 0.0620 | 0.0160 | 29 | 0.0240 | 0.0090 |
| 15 | 0.0820 | 0.0250 | 30 | 0.1060 | 0.0190 |
References
- Zhao, B.; Guo, C.X.; Cao, Y.J. A multiagent-based particle swarm optimization approach for optimal reactive power dispatch. IEEE Trans. Power Syst. 2005, 20, 1070–1078. [Google Scholar] [CrossRef]
- Agamah, S.; Ekonomou, L. A methodology for web-based power systems simulation and analysis using PHP programming. In Electricity Distribution-Intelligent Solutions for Electricity Transmission and Distribution Networks; Karampelas, P., Ekonomou, L., Eds.; Springer: Berlin, Germany, 2016. [Google Scholar]
- Lakshmi, M.; Ramesh, K.A. Optimal reactive power dispatch using crow search algorithm. Int. J. Electr. Comput. Eng. 2018, 8, 1423. [Google Scholar]
- Sulaiman, M.H.; Mustaffa, Z.; Mohamed, M.R.; Aliman, O. Using the gray wolf optimizer for solving optimal reactive power dispatch problem. Appl. Soft Comput. 2015, 32, 286–292. [Google Scholar] [CrossRef]
- Deeb, N.; Shahidehpour, S.M. Linear reactive power optimization in a large power network using the decomposition approach. IEEE Trans. Power Syst. 1990, 5, 428–438. [Google Scholar] [CrossRef]
- Lee, K.Y.; Park, Y.M.; Ortiz, J.L. A united approach to optimal real and reactive power dispatch. Power Eng. Soc. Gen. Meet. 1985, 104, 1147–1153. [Google Scholar]
- Horton, J.S.; Grigsby, L. Voltage optimization using combined linear programming & gradient techniques. IEEE Trans. Power Syst. 1984, 103, 1637–1643. [Google Scholar]
- Saachdeva, S.; Billington, R. Optimum network VAR planning by non linear programming. IEEE Trans. Power Syst. 1973, 92, 1217–1973. [Google Scholar] [CrossRef]
- Mahadevan, K.; Kannan, P.S. Comprehensive learning particle swarm optimization for reactive power dispatch. Appl. Soft Comput. 2010, 10, 641–652. [Google Scholar] [CrossRef]
- Quintana, V.H.; Santos-Nieto, M. Reactive power dispatch by successive quadratic programming. IEEE Trans. Energy Convers. 1989, 4, 425–435. [Google Scholar] [CrossRef]
- Granville, S. Optimal reactive power dispatch through interior point methods. IEEE Trans. Power Syst. 1994, 4, 136–146. [Google Scholar] [CrossRef]
- Polprasert, J.; Ongsakul, W.; Dieu, V.N. Optimal reactive power dispatch using improved pseudo-gradient search particle swarm optimization. Electr. Power Compon. Syst. 2016, 44, 518–532. [Google Scholar] [CrossRef]
- Abdullah, W.N.W.; Saibon, H.; Zain, A.A.M.; Lo, K.L. Genetic algorithm for optimal reactive power dispatch. In Proceedings of the International Conference on Energy Management and Power Delivery (EMPD), Singapore, 5 March 1998. [Google Scholar]
- Abou El Ela, A.A.; Abido, M.A.; Spea, S.R. Differential evolution algorithm for optimal reactive power dispatch. Electr. Power Syst. Res. 2011, 81, 458–464. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.N.; Mallipeddi, R.; Amaratunga, G.A.J. Optimal power flow solutions using differential evolution algorithm integrated with effective constraint handling techniques. Eng. Appl. Artif. Intell. 2018, 68, 81–100. [Google Scholar] [CrossRef]
- Basu, M. Quasi-oppositional differential evolution for optimal reactive power dispatch. Electr. Power Energy Syst. 2016, 78, 29–40. [Google Scholar] [CrossRef]
- Karthikaikannan, D.; Sundarabalan, C.K. Optimal reactive power dispatch with static VAR compensator using harmony search algorithms. Electron. J. 2017. [Google Scholar] [CrossRef]
- Pulluri, H.; Naresh, R.; Sharma, V. Application of stud krill herd algorithm for solution of optimal power flow problems. Int. Trans. Electr. Energy Syst. 2017, 6, 27. [Google Scholar] [CrossRef]
- Medani, K.B.O.; Sayah, S.; Bekrar, A. Whale optimization algorithm based optimal reactive power dispatch: A case study of the Algerian power system. Electr. Power Syst. Res. 2018, 163, 696–705. [Google Scholar] [CrossRef]
- Shaheen, A.M.; El-Sehiemy, R.A.; Farrag, S.M. Optimal reactive power dispatch using backtracking search algorithm. Aust. J. Electr. Electron. Eng. 2016, 13, 200–210. [Google Scholar] [CrossRef]
- Warid, W.; Hizam, H.; Mariun, N.; Abdul-Wahab, N. Optimal power flow using the jaya algorithm. Energies 2016, 678, 9. [Google Scholar] [CrossRef]
- Mei, R.N.S.; Sulaiman, M.H.; Mustaffa, Z.; Daniyal, H. Optimal reactive power dispatch solution by loss minimization using moth-flame optimization technique. Appl. Soft Comput. 2017, 59, 210–222. [Google Scholar]
- Anbarasan, P.; Jayabarathi, T. Optimal reactive power dispatch problem solved by symbiotic organism search algorithm. In Proceedings of the International Conference on Innovations in Power and Advanced Computing Technologies IEEE, Vellore, India, 21–22 April 2017. [Google Scholar]
- Bhattacharyya, B.; Saurav, R. PSO based bio inspired algorithms for reactive power planning. Int. J. Electr. Power Energy Syst. 2016, 74, 396–402. [Google Scholar] [CrossRef]
- Khaled, U.; Eltamaly, A.M.; Beroual, A. Optimal power flow using particle swarm optimization of renewable hybrid distributed generation. Energies 2017, 10, 1013. [Google Scholar] [CrossRef]
- Shaw, B.; Mukherjee, V.; Ghoshal, S.P. Solution of reactive power dispatch of power systems by an opposition-based gravitational search algorithm. Int. J. Electr. Power Energy Syst. 2014, 55, 29–40. [Google Scholar] [CrossRef]
- Thangaraj, R.; Pant, M.; Abraham, A.; Bouvry, P. Particle swarm optimization: Hybridization perspectives and experimental illustrations. Appl. Math. Comput. 2011, 217, 5208–5226. [Google Scholar] [CrossRef]
- Vlachogiannis, J.G.; Lee, K.Y. A Comparative study on particle swarm optimization for optimal steady-state performance of power systems. IEEE Trans. Power Syst. 2006, 21, 1718–1728. [Google Scholar] [CrossRef]
- Roy, P.K.; Ghoshal, S.P.; Thakur, S.S. Optimal VAR control for improvements in voltage profiles and for real power loss minimization using biogeography based optimization. Int. J. Electr. Power Energy Syst. 2012, 43, 830–838. [Google Scholar] [CrossRef]
- Mallipeddi, R.; Jeyadevi, S.; Suganthan, P.N.; Baskar, S. Efficient constraint handling for optimal reactive power dispatch problems. Swarm Evol. Comput. 2012, 5, 28–36. [Google Scholar] [CrossRef]
- Chuanwen, J.; Bompard, E. A hybrid method of chaotic particle swarm optimization and linear interior for reactive power optimization. Math. Comput. Simul. 2005, 68, 57–65. [Google Scholar] [CrossRef]
- Bhattacharyya, B.; Goswami, S.K.; Bansal, R.C. Hybrid fuzzy particle swarm optimization approach for reactive power optimization. J. Electr. Syst. 2009, 5, 1–15. [Google Scholar]
- Naderi, E.; Narimani, H.; Fathi, M.; Narimani, M.R. A novel fuzzy adaptive configuration of particle swarm optimization to solve large-scale optimal reactive power dispatch. Appl. Soft Comput. 2017, 53, 441–456. [Google Scholar] [CrossRef]
- Li, Y.; Jing, P.; Hu, D.; Zhang, B.; Mao, C.; Ruan, X.; Miao, X.; Chang, D. Optimal reactive power dispatch using particle swarms optimization algorithm based Pareto optimal set. In Advances in Neural Networks-ISNN 2009, Proceedings of the International Symposium on Neural Networks, Wuhan, China, 26–29 May 2009; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Subbaraj, P.; Rajnarayanan, P.N. Hybrid particle swarm optimization based optimal reactive power dispatch. Int. J. Comput. Appl. 2010, 1, 65–70. [Google Scholar] [CrossRef]
- Sayah, S.; Hamouda, A. A hybrid differential evolution algorithm based on particle swarm optimization for nonconvex economic dispatch problems. Appl. Soft Comput. 2013, 13, 1608–1619. [Google Scholar] [CrossRef]
- Mehdinejad, M.; Mohammadi-Ivatloo, B.; Dadashzadeh-Bonab, R.; Zare, K. Solution of optimal reactive power dispatch of power systems using hybrid particle swarm optimization and imperialist competitive algorithms. Int. J. Electr. Power Energy Syst. 2016, 83, 104–116. [Google Scholar] [CrossRef]
- Lenin, K.; Reddy, B.R.; Kalavathi, M.S. Hybrid genetic algorithm and particle swarm optimization (HGAPSO) algorithm for solving optimal reactive power dispatch problem. Int. J. Electron. Electr. Eng. 2013, 1, 262–268. [Google Scholar] [CrossRef]
- Yapıcı, H.; Çetinkaya, N. An improved particle swarm optimization algorithm using eagle strategy for power loss minimization. Math. Probl. Eng. 2017, 2017, 1–11. [Google Scholar] [CrossRef]
- Abido, M.A. Optimal power flow using tabu search algorithm. Electr. Power Compon. Syst. 2002, 30, 469–483. [Google Scholar] [CrossRef]
- Zou, Y. Optimal reactive power planning based on improved tabu search algorithm. In Proceedings of the 2010 International Conference on Electrical and Control Engineering (ICECE), Wuhan, China, 25–27 June 2010. [Google Scholar]
- Shen, Q.; Shi, W.M.; Wei, K. Hybrid particle swarm optimization and tabu search approach for selecting genes for tumor classification using gene expression data. Comput. Biol. Chem. 2008, 32, 53–60. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995. [Google Scholar]
- Eberhart, R.C.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995. [Google Scholar]
- Hu, X.; Eberhart, R.C. Solving constrained nonlinear optimization problems with particle swarm optimization. In Proceedings of the Sixth World Multi-conference on Systemics, Cybernetics and Informatics, Orlando, FL, USA, 14–18 July 2002. [Google Scholar]
- Özgür, Y. Penalty function methods for constrained optimization with genetic algorithms. Math. Comput. Appl. 2005, 10, 45–56. [Google Scholar]
- Bouchekara, H.R.E.H.; Abido, M.A.; Boucherma, M. Optimal power flow using Teaching-Learning-Based Optimization technique. Electr. Power Syst. Res. 2014, 114, 49–59. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chattopadhyay, P.K. Solution of optimal reactive power flow using biogeography-based optimization. Electr. Electron. Sci. Eng. 2010, 3, 269–277. [Google Scholar]
- Glover, F.; Laguna, M. Tabu Search; Kluwer Academic Publishers: Norwell, MA, USA, 1997. [Google Scholar]
- Pothiya, S.; Ngamroo, I.; Kongprawechnon, W. Application of multiple tabu search algorithm to solve dynamic economic dispatch considering generator constraints. Energy Convers. Manag. 2008, 49, 506–516. [Google Scholar] [CrossRef]
- Chelouah, R.; Siarry, P. Enhanced continuous tabu search: An algorithm for the global optimization of multiminima functions. In Metaheuristics Advances and Trends in Local Search Paradigms for Optimization; Kluwer Academic Publishers: Norwell, MA, USA, 1999. [Google Scholar]
- Power Systems Test Case Archive. Available online: www.ee.washington.edu/research/pstca/pf30/pg_tca30bus.htm (accessed on 20 September 2017).
Figure 1.
Schematic diagram of an electric power system.

Figure 2.
General flowchart of PSO-TS method.

Figure 3.
Detailed flowchart of the PSO-TS method.

Figure 4.
Single-line diagram of IEEE 30 bus test system.

Figure 5.
Comparative graph of the power losses (Case 1).

Figure 6.
Convergence characteristic of the power losses (Case 1).

Figure 7.
Convergence characteristic of the voltage deviation objective (SVD) (Case 1).

Figure 8.
Comparative graph of the voltage deviation objective (SVD) (Case 1).

Figure 9.
Comparative graph of the power losses (Case 2).

Figure 10.
Convergence characteristic of the power losses (Case 2).

Figure 11.
Comparative graph of the voltage deviation objective (SVD) (Case 2).

Figure 12.
Convergence characteristic of the voltage deviation objective (SVD) (Case 2).

Table 1.
Control parameter settings.
| Parameters | Value |
|---|---|
| Initial inertia weight w | 0.9 and decreased to 0.4 |
| Acceleration factor c1 | 2 |
| Acceleration factor c2 | 2 |
| Maximum number of generations (PSO) | 200 |
| Swarm size | 20 |
| Tabu list length | 7 |
| Number of neighborhood | 3 |
| Radius of neighborhood | 0.1 |
| Maximum number of generations (TS) | 1000 |
Table 2.
Experimental results of TS, PSO and PSO-TS algorithms (Case 1).
| Control Variables | CA | IP-OPF | LPAC | GPAC | BBO | TS | PSO | PSO-TS |
|---|---|---|---|---|---|---|---|---|
| V1 | 1.02282 | 1.10000 | 1.02342 | 1.02942 | 1.1000 | 1.0684 | 1.1000 | 1.0992 |
| V2 | 1.09093 | 1.05414 | 0.99893 | 1.00645 | 1.0943 | 1.0933 | 1.0943 | 1.0948 |
| V5 | 1.03008 | 1.10000 | 0.99469 | 1.01692 | 1.0804 | 1.0893 | 1.1000 | 1.0766 |
| V8 | 0.95000 | 1.03348 | 1.01364 | 1.03952 | 1.0939 | 1.0853 | 1.1000 | 1.0977 |
| V11 | 1.04289 | 1.10000 | 1.01647 | 1.03952 | 1.1000 | 1.0017 | 0.9505 | 1.0837 |
| V13 | 1.03921 | 1.01497 | 1.01101 | 1.04870 | 1.1000 | 1.0780 | 1.1000 | 1.0754 |
| T6–9 | 1.07894 | 0.99334 | 1.04247 | 1.04225 | 1.1000 | 0.9979 | 1.0547 | 0.9257 |
| T6–10 | 0.94276 | 1.05938 | 0.99432 | 0.99417 | 0.9058 | 0.9008 | 1.1000 | 1.0291 |
| T4–12 | 1.00064 | 1.00879 | 1.00061 | 1.00218 | 0.9521 | 1.0337 | 0.9000 | 0.9265 |
| T27–28 | 1.00693 | 0.99712 | 1.00694 | 1.00751 | 0.9638 | 0.9441 | 0.9468 | 0.9422 |
| QSh10 | 0.15232 | 0.15253 | 0.17737 | 0.17267 | 0.2891 | 0.1395 | 0.3000 | 0.2864 |
| QSh24 | 0.06249 | 0.08926 | 0.06172 | 0.06539 | 0.1007 | 0.1838 | 0.0000 | 0.1363 |
| Ploss (MW) | 5.09209 | 5.10091 | 5.09212 | 5.09226 | 4.9650 | 5.2240 | 4.9819 | 4.6304 |
Table 3.
Experimental results of TS, PSO and PSO-TS algorithms (Case 1).
| Control Variables | CA | IP-OPF | LPAC | GPAC | BBO | TS | PSO | PSO-TS |
|---|---|---|---|---|---|---|---|---|
| V1 | 1.0890 | 1.10000 | 1.03879 | 1.00963 | 1.0033 | 1.0760 | 0.9875 | 1.0014 |
| V2 | 0.9500 | 0.99100 | 1.01776 | 1.00984 | 1.0071 | 1.0494 | 0.9513 | 1.0592 |
| V5 | 1.0860 | 0.96145 | 1.04863 | 1.01000 | 1.0189 | 1.0056 | 1.0641 | 1.0542 |
| V8 | 1.1000 | 0.95986 | 1.04993 | 1.03516 | 1.0148 | 1.0238 | 1.0596 | 1.0133 |
| V11 | 1.0021 | 1.10000 | 0.98373 | 1.03000 | 0.9908 | 1.0085 | 1.0972 | 0.9905 |
| V13 | 1.0279 | 0.95000 | 1.00524 | 1.00274 | 1.0697 | 0.9641 | 1.1000 | 1.0291 |
| T6–9 | 1.0287 | 0.99734 | 1.03054 | 1.02139 | 1.0039 | 0.9486 | 1.0344 | 0.9762 |
| T6–10 | 0.9000 | 1.08595 | 0.91429 | 0.93327 | 0.9000 | 0.9840 | 1.1000 | 1.0163 |
| T4–12 | 0.9929 | 1.00087 | 0.99469 | 0.99338 | 1.0490 | 0.9647 | 0.9000 | 0.9537 |
| T27–28 | 1.0248 | 1.00482 | 1.02078 | 1.02729 | 0.9546 | 1.0287 | 0.9516 | 0.9481 |
| QSh10 | 0.0000 | 0.11072 | 0.00000 | 0.04348 | 0.0924 | 0.0917 | 03000 | 0.2890 |
| QSh24 | 0.0000 | 0.15928 | 0.03586 | 0.00000 | 0.1244 | 0.2278 | 0.0440 | 0.0697 |
| SVD (p.u) | 0.12252 | 0.17328 | 0.12401 | 0.12737 | 0.1194 | 0.1874 | 0.1275 | 0.1113 |
Table 4.
Experimental results of TS, PSO and PSO-TS algorithms (Case 2).
| Control Variables | Initial | DE | CLPSO | BBO | TS | PSO | PSO-TS |
|---|---|---|---|---|---|---|---|
| V1 | 1.0500 | 1.1000 | 1.1000 | 1.1000 | 1.0835 | 1.1000 | 1.1000 |
| V2 | 1.0400 | 1.0931 | 1.1000 | 1.0944 | 1.0567 | 1.1000 | 1.0943 |
| V5 | 1.0100 | 1.0736 | 1.0795 | 1.0749 | 1.0671 | 1.0832 | 1.0749 |
| V8 | 1.0100 | 1.0756 | 1.1000 | 1.0768 | 1.0944 | 1.1000 | 1.0766 |
| V11 | 1.0500 | 1.1000 | 1.1000 | 1.0999 | 0.9873 | 0.9500 | 1.1000 |
| V13 | 1.0500 | 1.1000 | 1.1000 | 1.0999 | 1.0863 | 1.1000 | 1.1000 |
| T6–9 | 1.0780 | 1.0465 | 0.9154 | 1.0435 | 1.0745 | 1.1000 | 0.9744 |
| T6–10 | 1.0690 | 0.9097 | 0.9000 | 0.9011 | 0.9960 | 1.0953 | 1.0510 |
| T4–12 | 1.0320 | 0.9867 | 0.9000 | 0.9824 | 0.9678 | 0.9000 | 0.9000 |
| T27–28 | 1.0680 | 0.9689 | 0.9397 | 0.9691 | 1.0267 | 1.0137 | 0.9635 |
| QSh10 | 0.0000 | 0.0500 | 0.0492 | 0.0499 | 0.0146 | 0.0500 | 0.0500 |
| QSh12 | 0.0000 | 0.0500 | 0.0500 | 0.0498 | 0.0376 | 0.0500 | 0.0500 |
| QSh15 | 0.0000 | 0.0500 | 0.0500 | 0.0499 | 0.0000 | 0.0000 | 0.0500 |
| QSh17 | 0.0000 | 0.0500 | 0.0500 | 0.0499 | 0.0335 | 0.0500 | 0.0500 |
| QSh20 | 0.0000 | 0.0440 | 0.0500 | 0.0499 | 0.0019 | 0.0500 | 0.0386 |
| QSh21 | 0.0000 | 0.0500 | 0.0500 | 0.0499 | 0.0242 | 0.0500 | 0.0500 |
| QSh23 | 0.0000 | 0.0280 | 0.0500 | 0.0387 | 0.0307 | 0.0500 | 0.0500 |
| QSh24 | 0.0000 | 0.0500 | 0.0500 | 0.0498 | 0.0294 | 0.0500 | 0.0500 |
| QSh29 | 0.0000 | 0.0259 | 0.0500 | 0.0290 | 0.0399 | 0.0260 | 0.0213 |
| Ploss (MW) | 5.8322 | 4.5550 | 4.5615 | 4.5511 | 4.9203 | 4.6862 | 4.5213 |
Table 5.
Experimental results of TS, PSO and PSO-TS algorithms (Case 2).
| Control Variables | Initial State | DE | TS | PSO | PSO-TS |
|---|---|---|---|---|---|
| V1 | 1.0500 | 1.0100 | 0.9518 | 0.9898 | 0.9867 |
| V2 | 1.0400 | 0.9918 | 1.0888 | 0.9529 | 0.9910 |
| V5 | 1.0100 | 1.0179 | 1.0502 | 1.0493 | 1.0244 |
| V8 | 1.0100 | 1.0183 | 1.0052 | 0.9988 | 1.0042 |
| V11 | 1.0500 | 1.0114 | 1.0730 | 1.0749 | 1.0106 |
| V13 | 1.0500 | 1.0282 | 1.0637 | 1.0404 | 1.0734 |
| T6–9 | 1.0780 | 1.0265 | 1.0137 | 1.0548 | 1.0725 |
| T6–10 | 1.0690 | 0.9038 | 1.0342 | 1.1000 | 0.9797 |
| T4–12 | 1.0320 | 1.0114 | 0.9993 | 0.9115 | 0.9273 |
| T27–28 | 1.0680 | 0.9635 | 0.9652 | 0.9458 | 0.9607 |
| QSh10 | 0.0000 | 0.0494 | 0.0355 | 0.0500 | 0.0095 |
| QSh12 | 0.0000 | 0.0108 | 0.0419 | 0.0500 | 0.0215 |
| QSh15 | 0.0000 | 0.0499 | 0.0032 | 0.0486 | 0.0226 |
| QSh17 | 0.0000 | 0.0023 | 0.0008 | 0.0500 | 0.0005 |
| QSh20 | 0.0000 | 0.0499 | 0.0491 | 0.0500 | 0.0359 |
| QSh21 | 0.0000 | 0.0490 | 0.0134 | 0.0500 | 0.0401 |
| QSh23 | 0.0000 | 0.0498 | 0.0382 | 0.0500 | 0.0427 |
| QSh24 | 0.0000 | 0.0496 | 0.0426 | 0.0500 | 0.0374 |
| QSh29 | 0.0000 | 0.0223 | 0.0306 | 0.0000 | 0.0210 |
| SVD (p.u) | 1.1521 | 0.0911 | 0.1540 | 0.1006 | 0.0866 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Sahli, Z.; Hamouda, A.; Bekrar, A.; Trentesaux, D. Reactive Power Dispatch Optimization with Voltage Profile Improvement Using an Efficient Hybrid Algorithm †. Energies 2018, 11, 2134. https://doi.org/10.3390/en11082134
AMA Style
Sahli Z, Hamouda A, Bekrar A, Trentesaux D. Reactive Power Dispatch Optimization with Voltage Profile Improvement Using an Efficient Hybrid Algorithm †. Energies. 2018; 11(8):2134. https://doi.org/10.3390/en11082134
Chicago/Turabian StyleSahli, Zahir, Abdellatif Hamouda, Abdelghani Bekrar, and Damien Trentesaux. 2018. "Reactive Power Dispatch Optimization with Voltage Profile Improvement Using an Efficient Hybrid Algorithm †" Energies 11, no. 8: 2134. https://doi.org/10.3390/en11082134
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.