A Novel Data-Driven Fast Capacity Estimation of Spent Electric Vehicle Lithium-ion Batteries


Abstract
:1. Introduction

2. Back Propagation Network Modeling of a Battery System
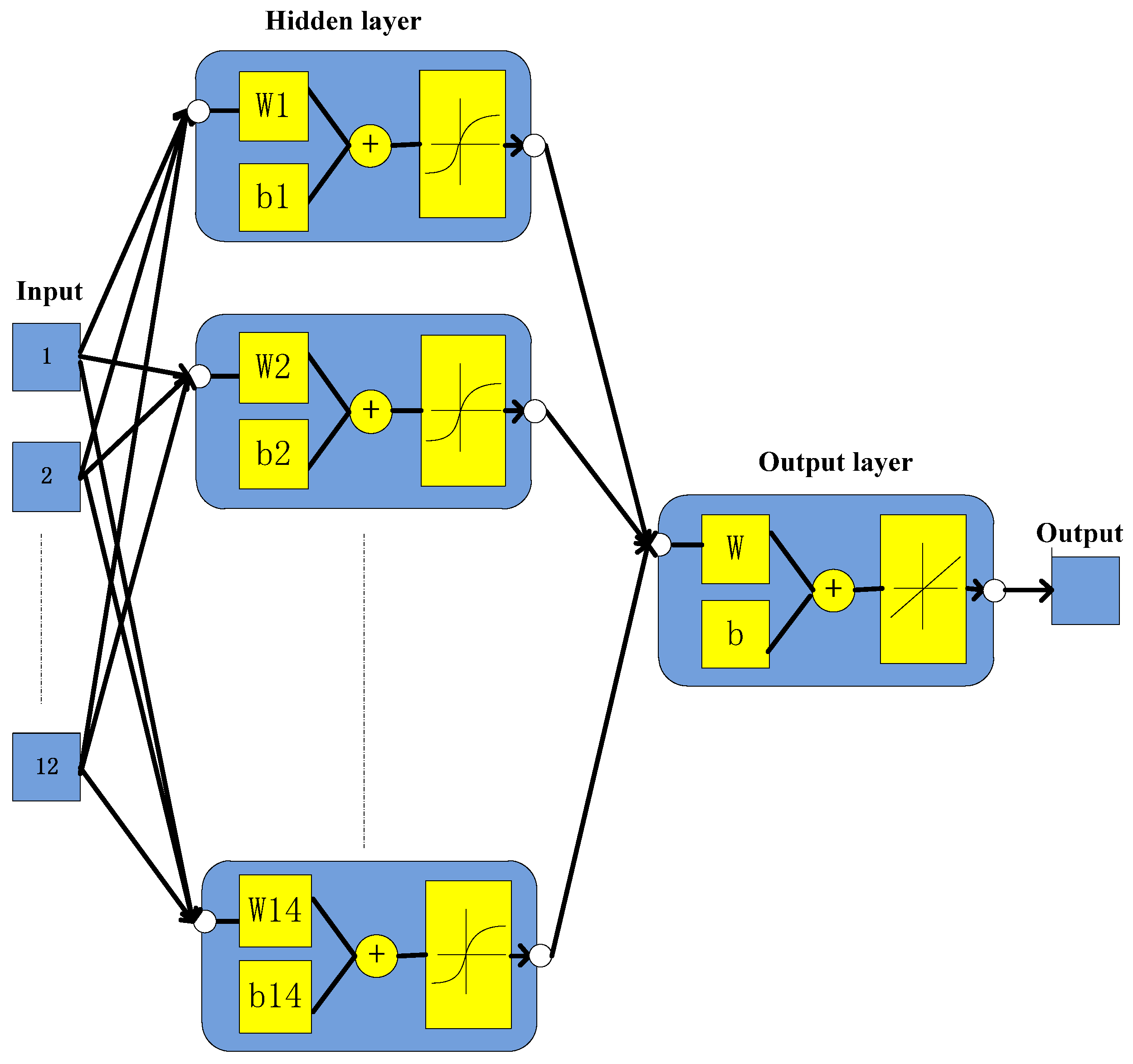
2.1. The Model Structure

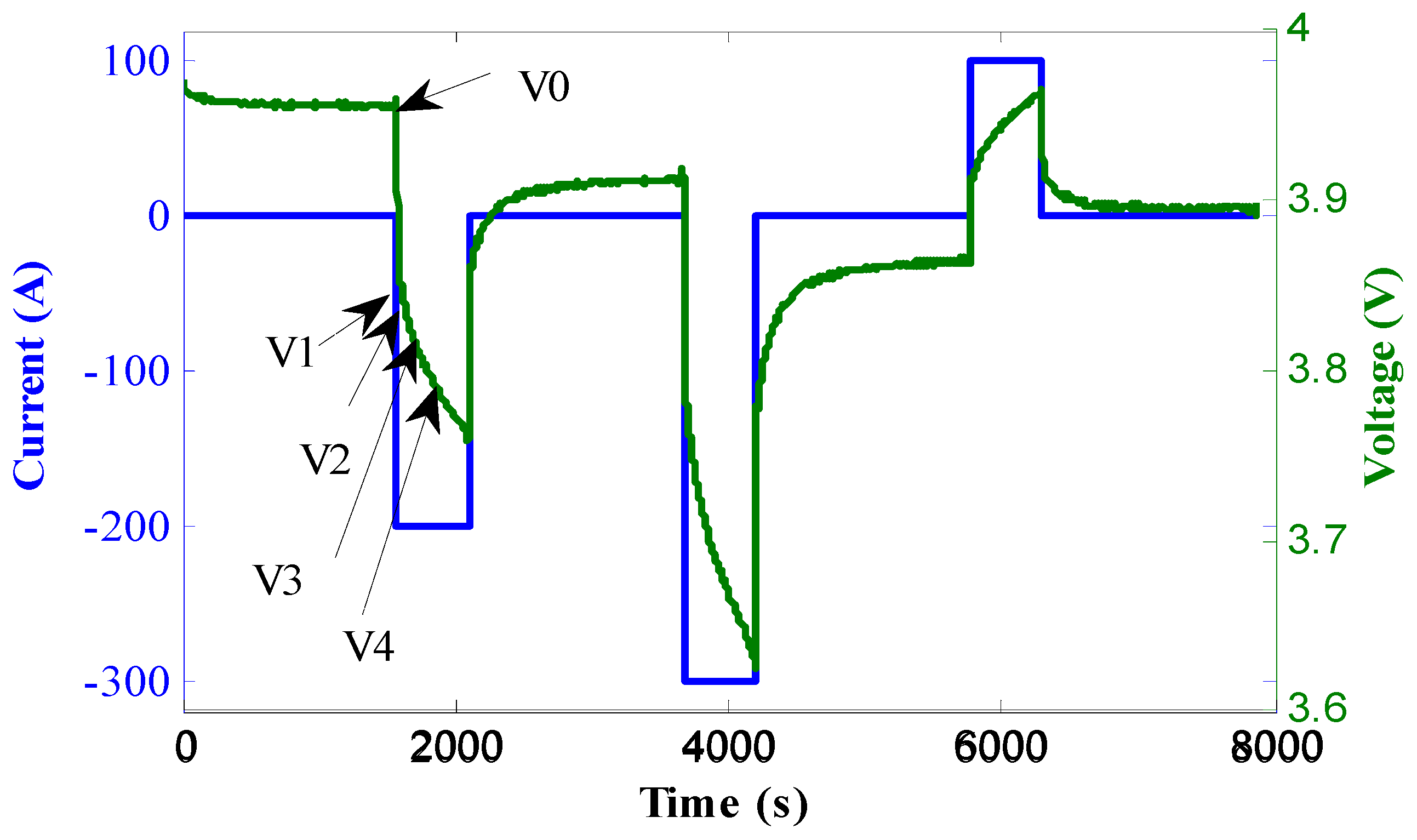
2.2. Input of the Back Propagation Model

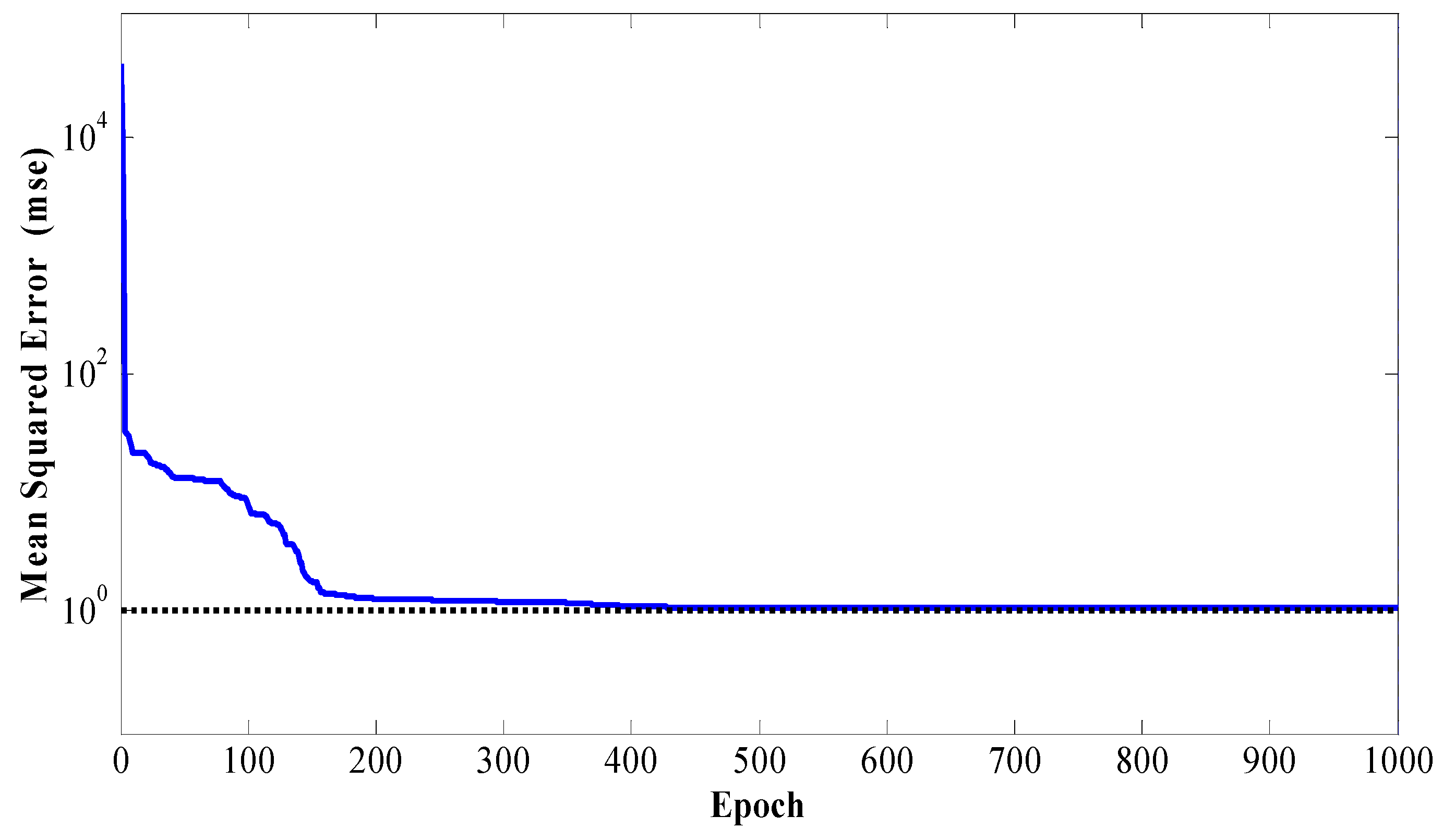
2.3. Method of Back Propagation Network Training
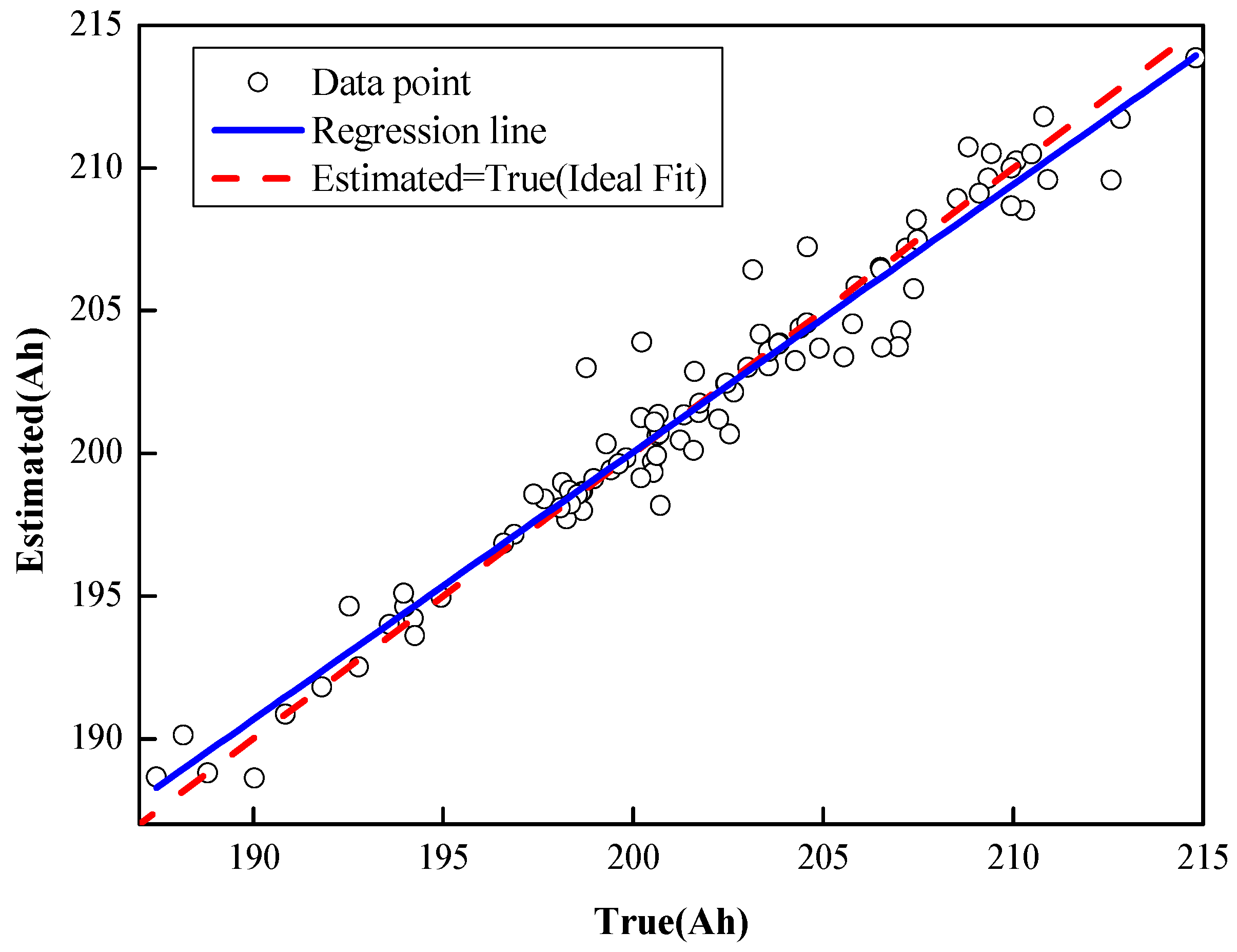
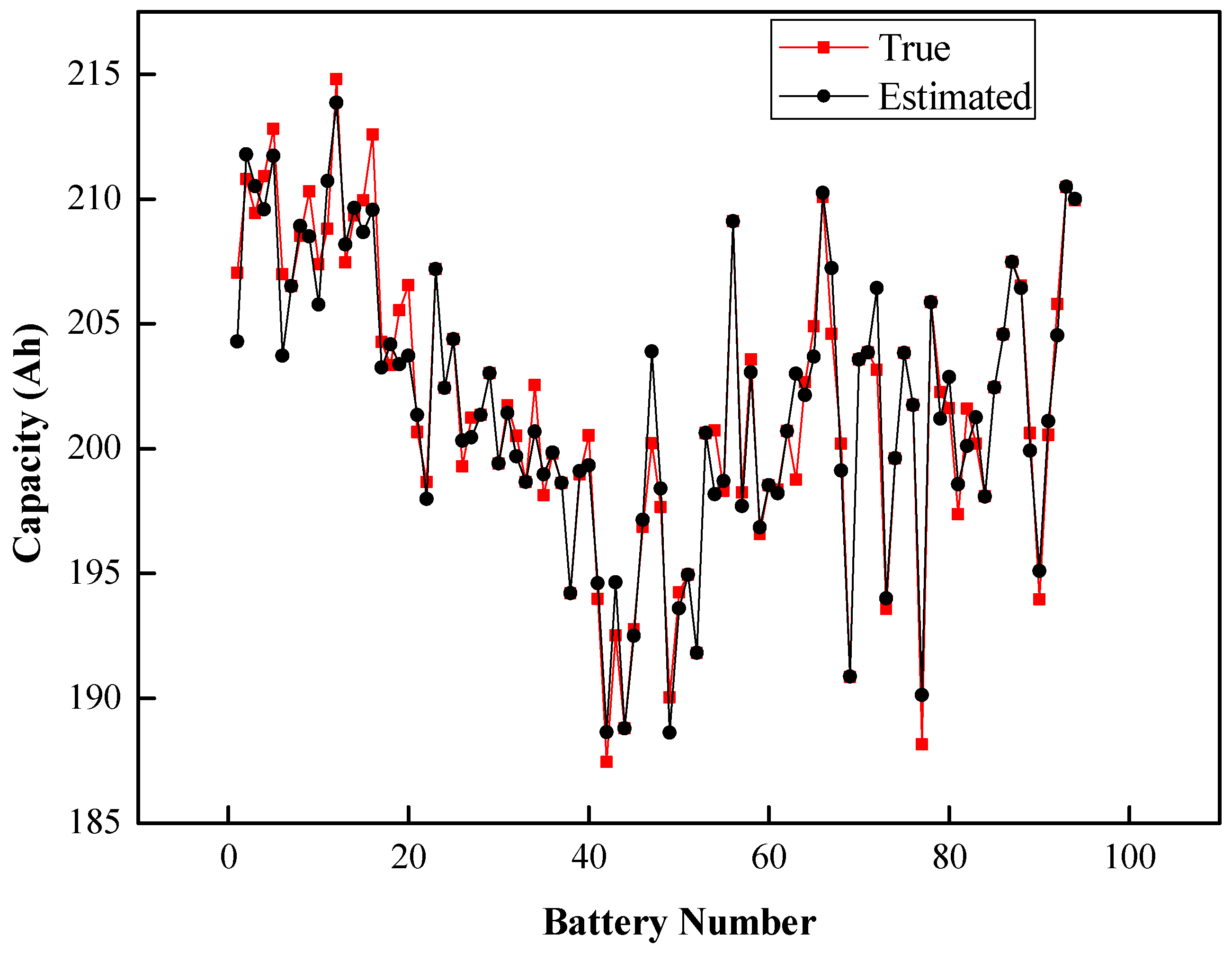
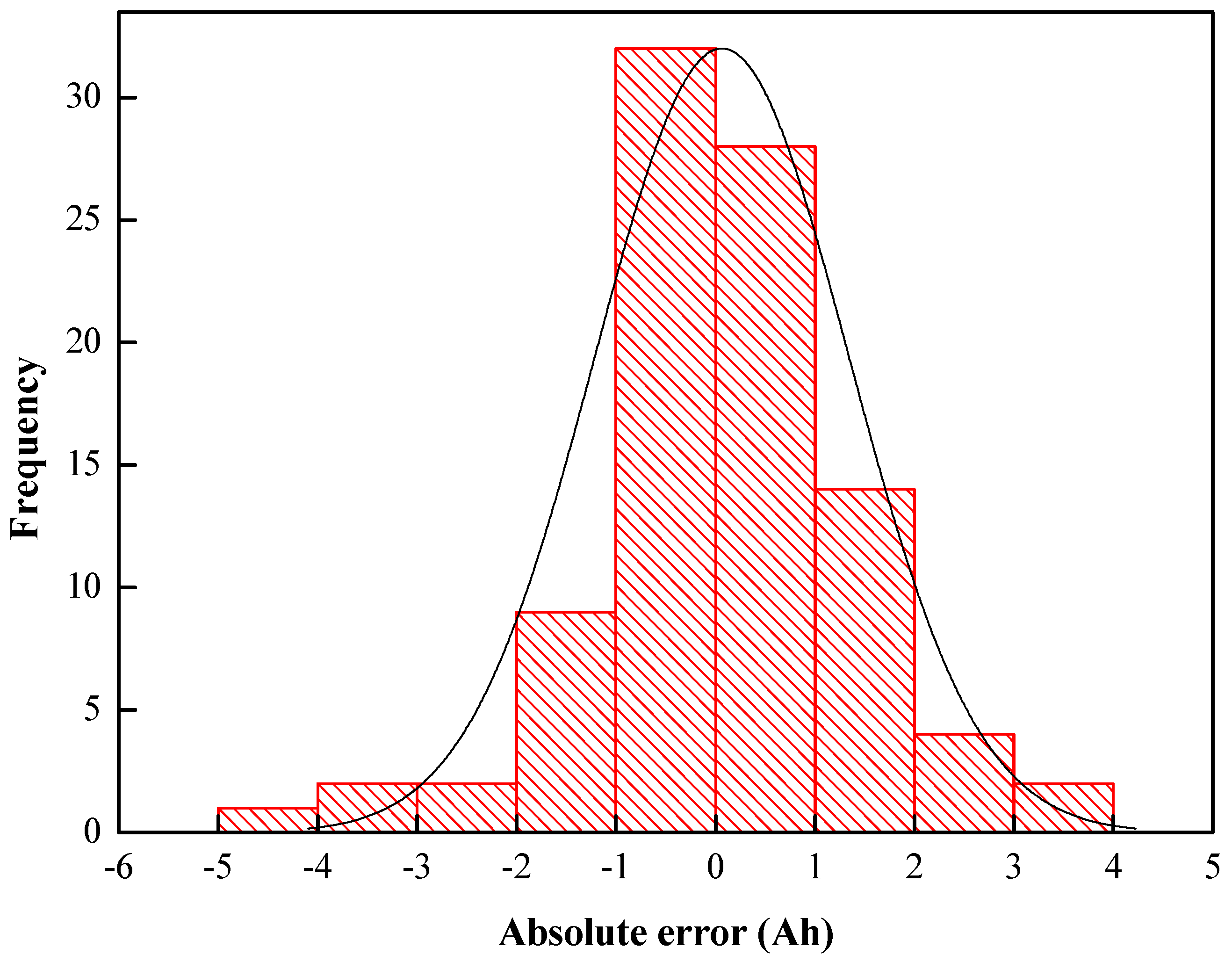
3. Available Capacity Estimation Using the Back Propagation Neural Network
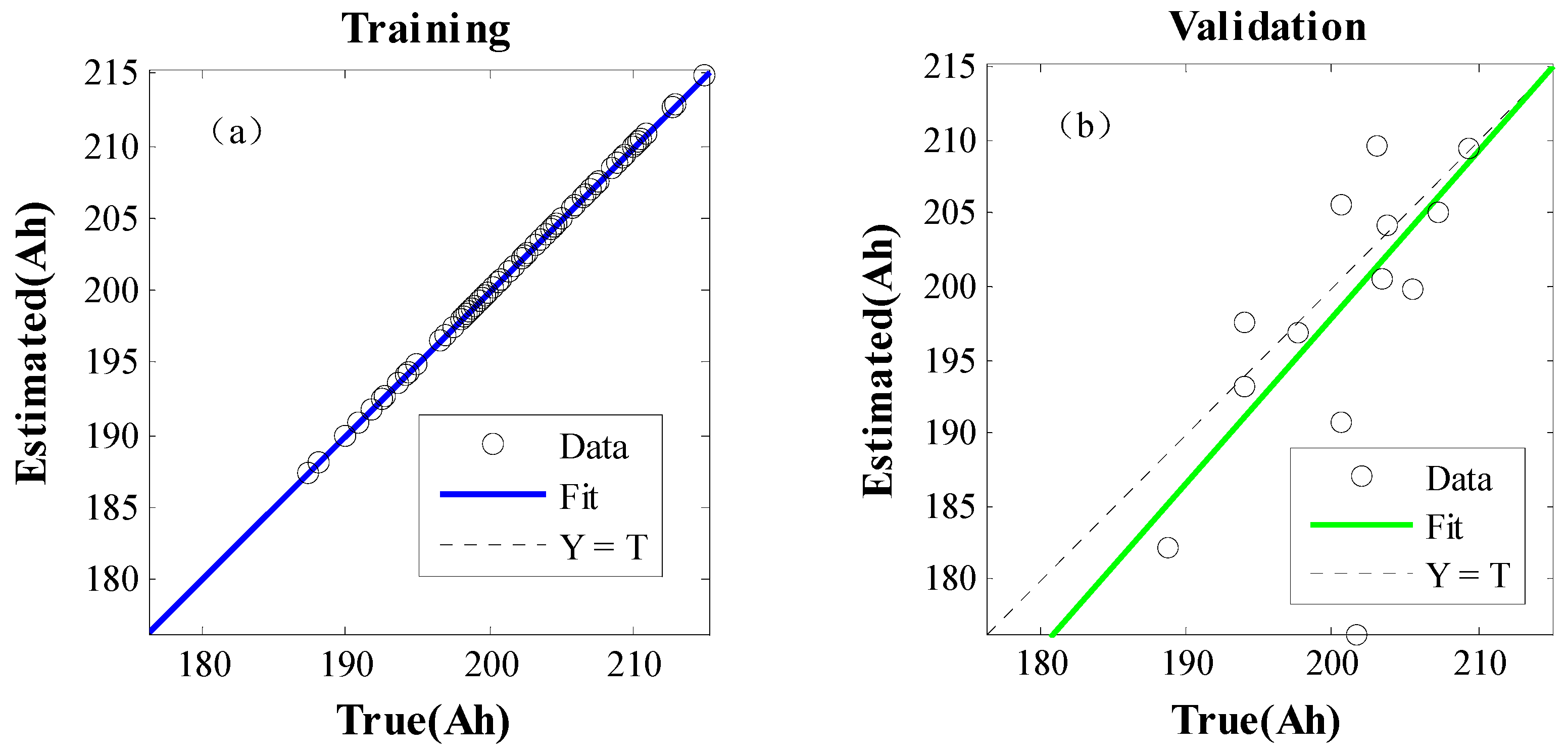
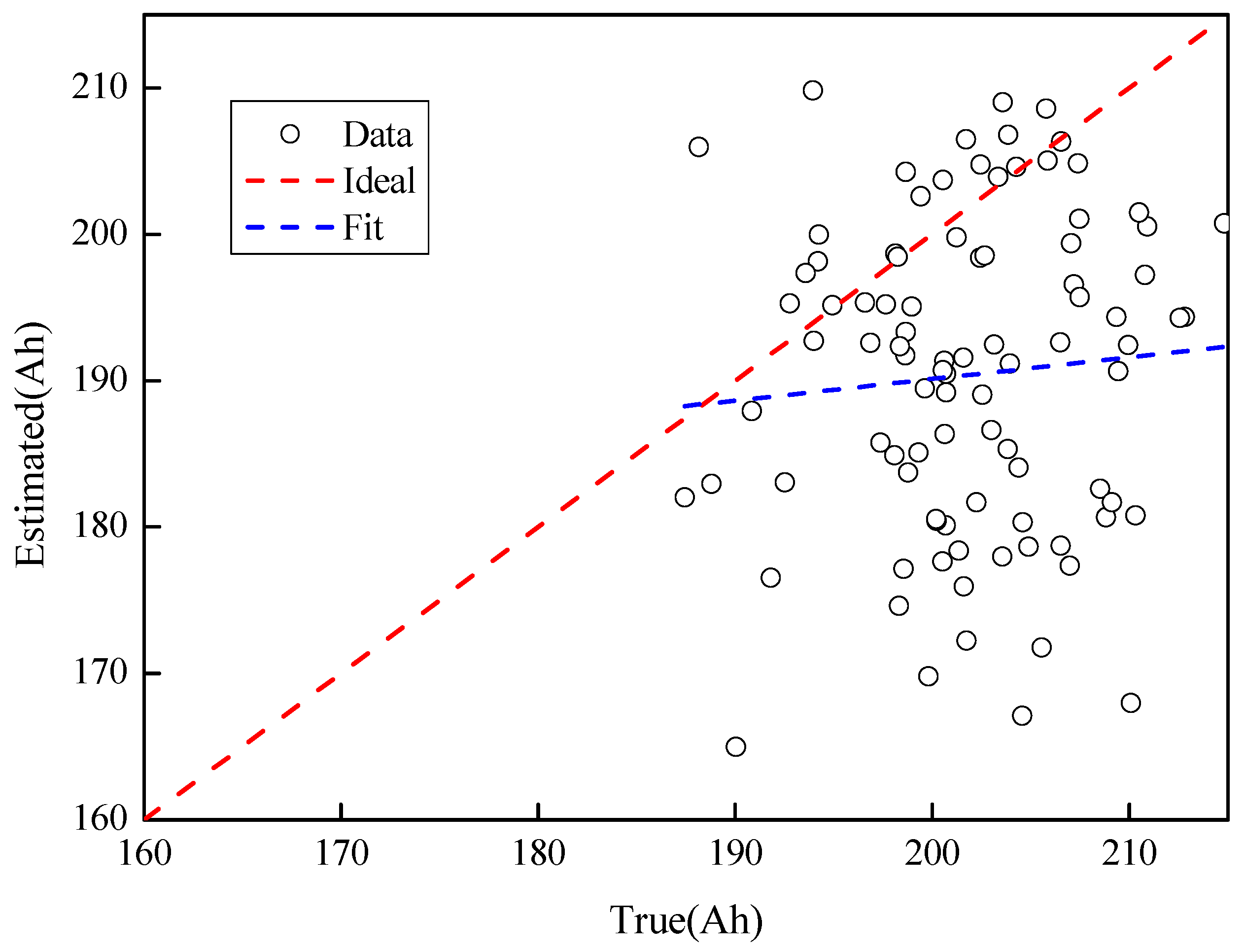
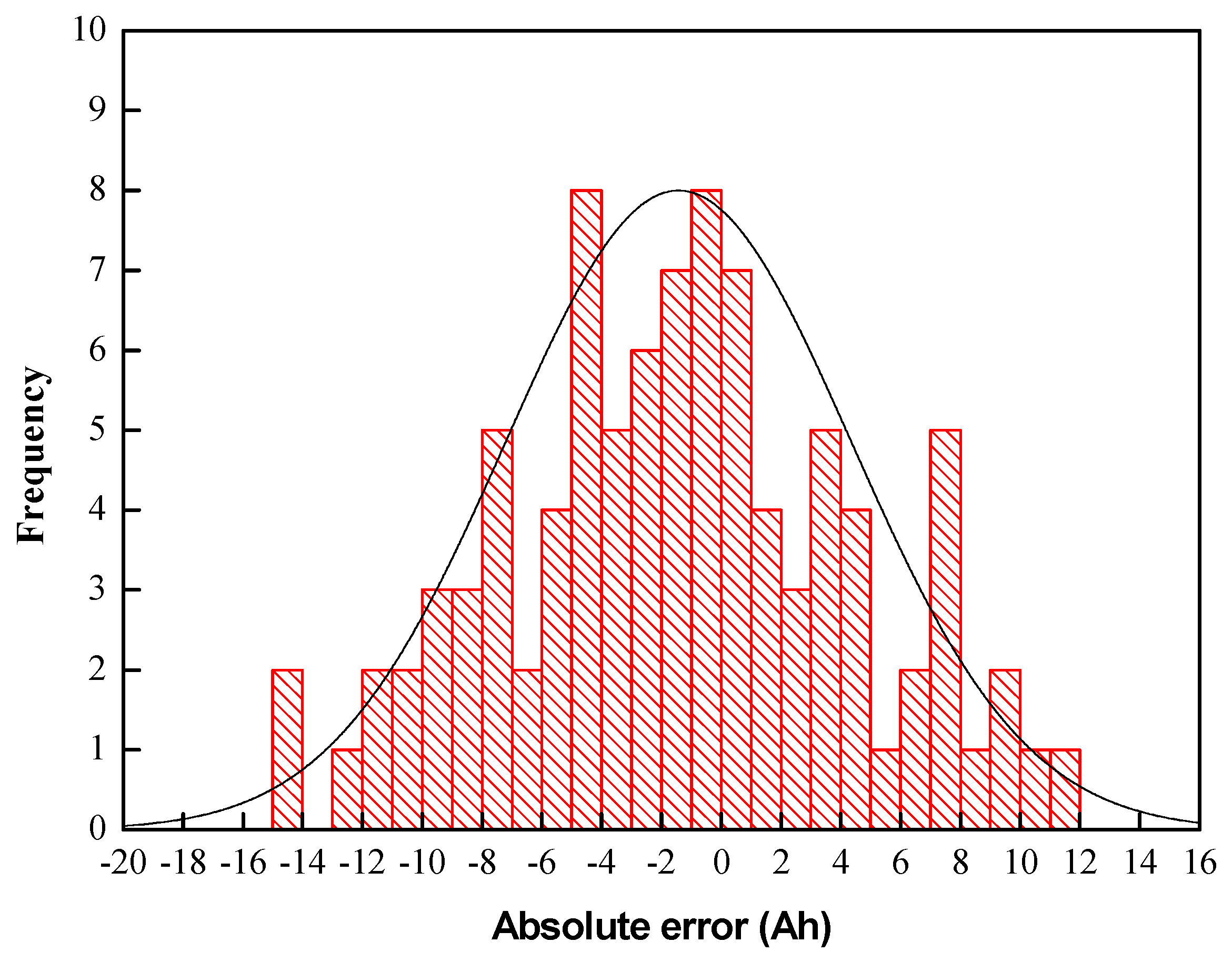
3.1. Training Result Analysis






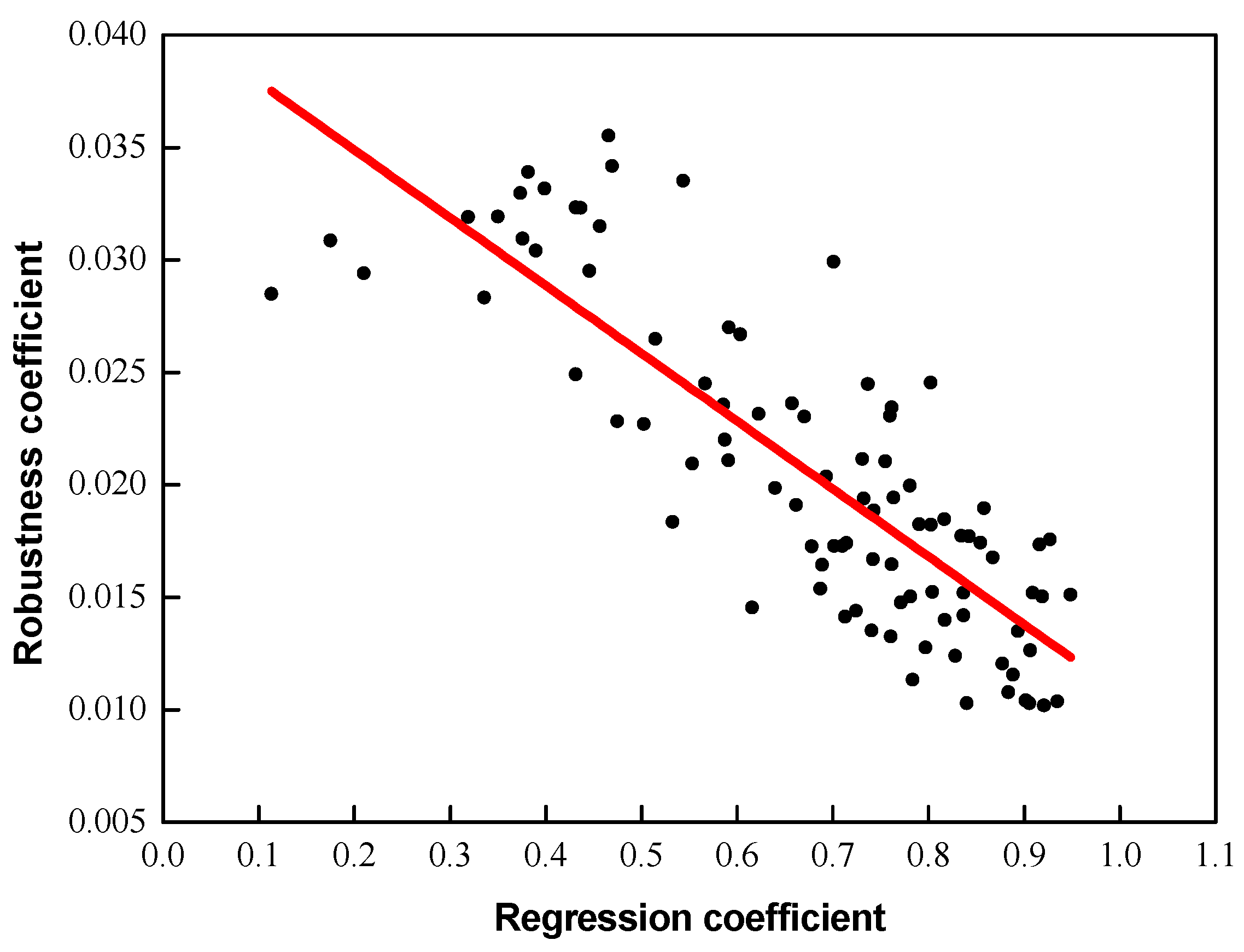
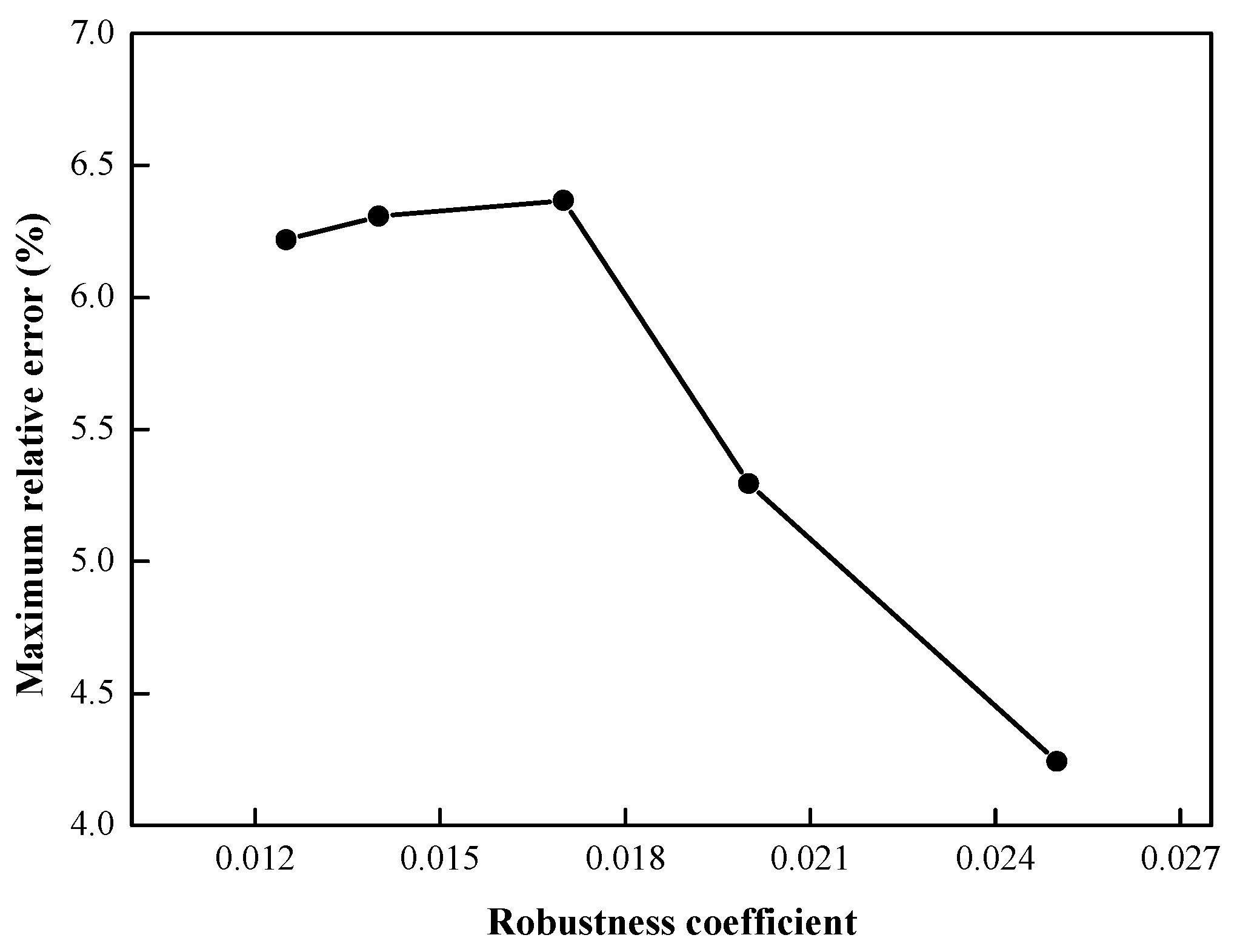
3.2. Analysis of Robustness to Noisy Data





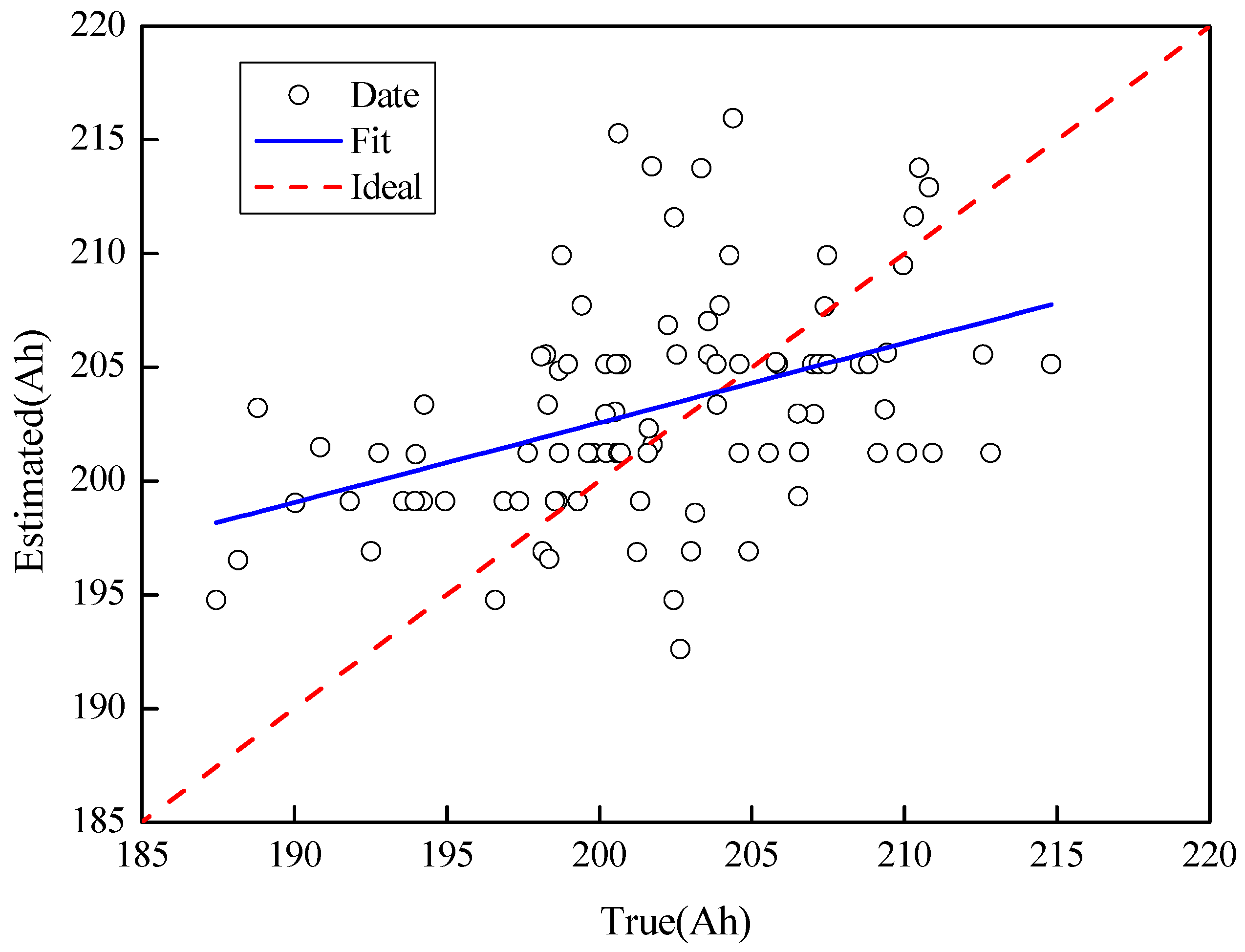
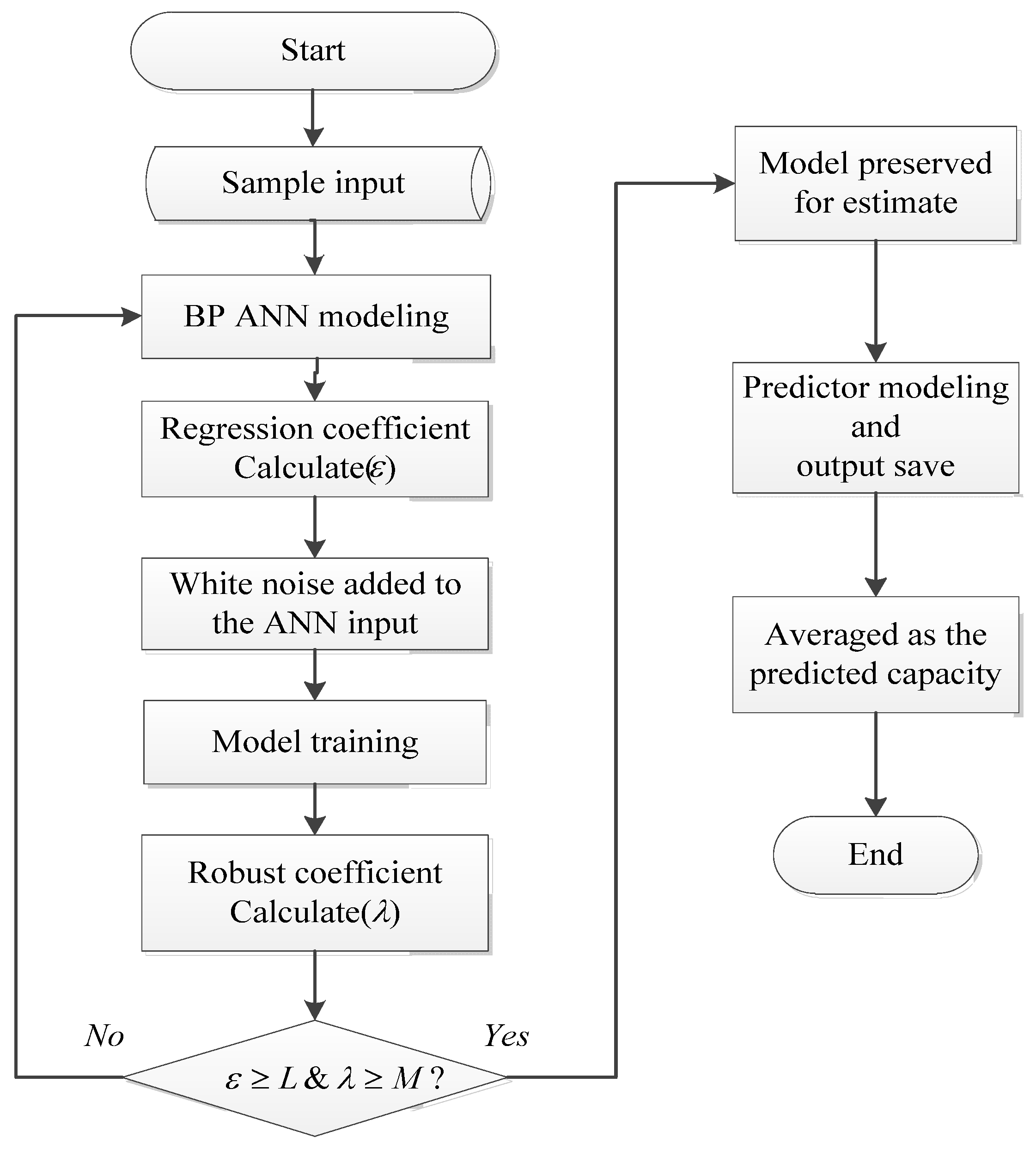
3.3. Proposed Robust Back Propagation Artificial Neural Network

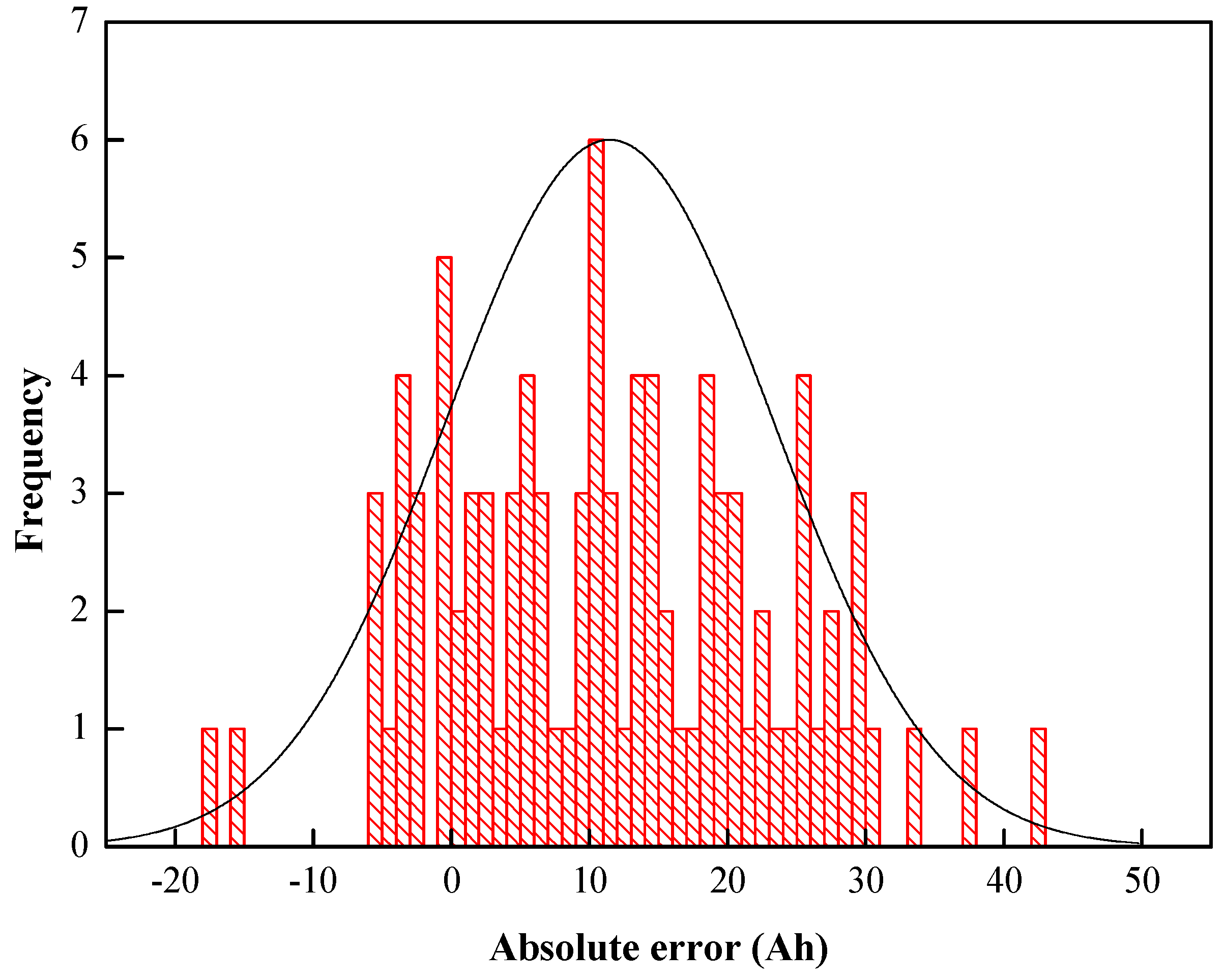
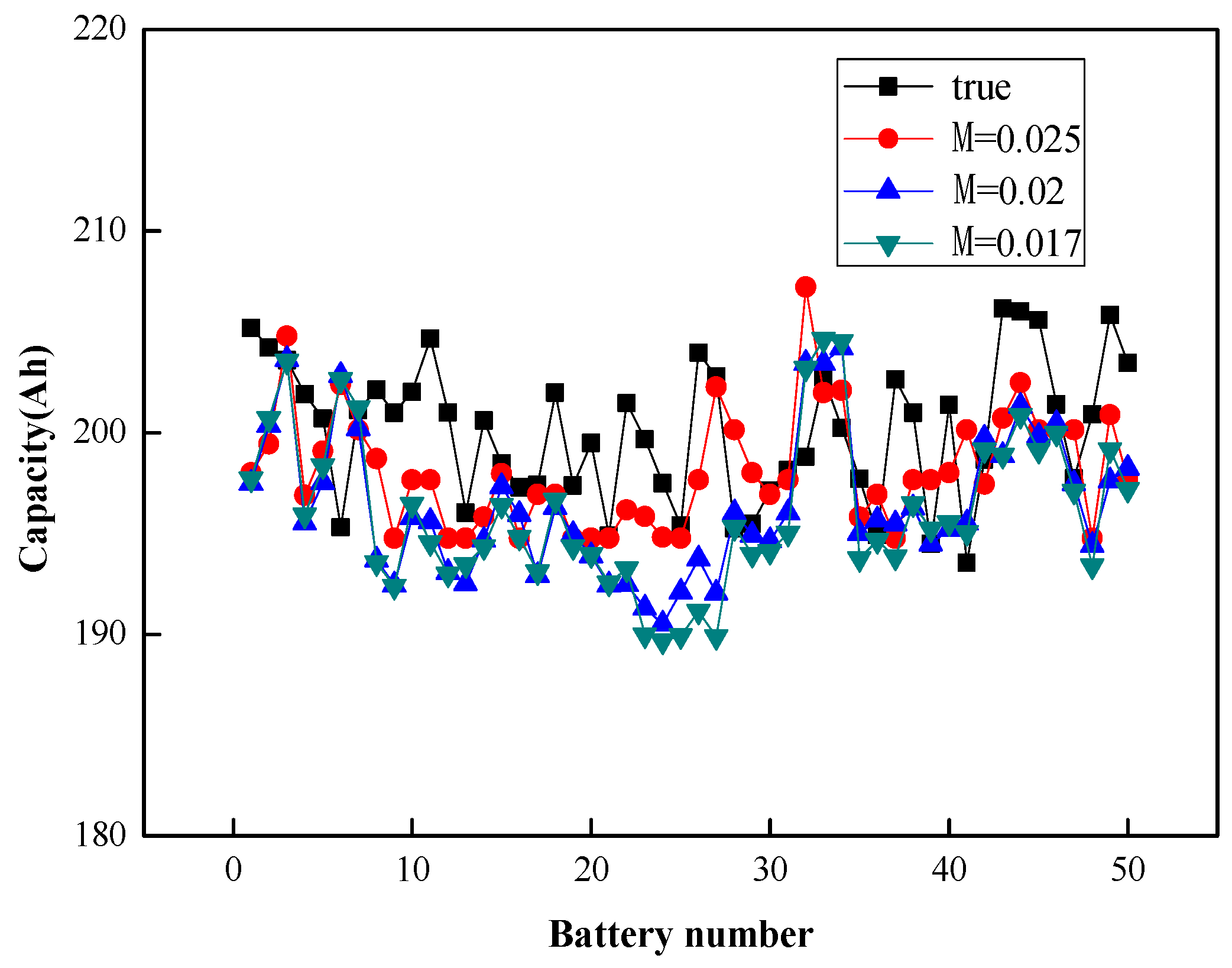
4. Results and Discussion




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
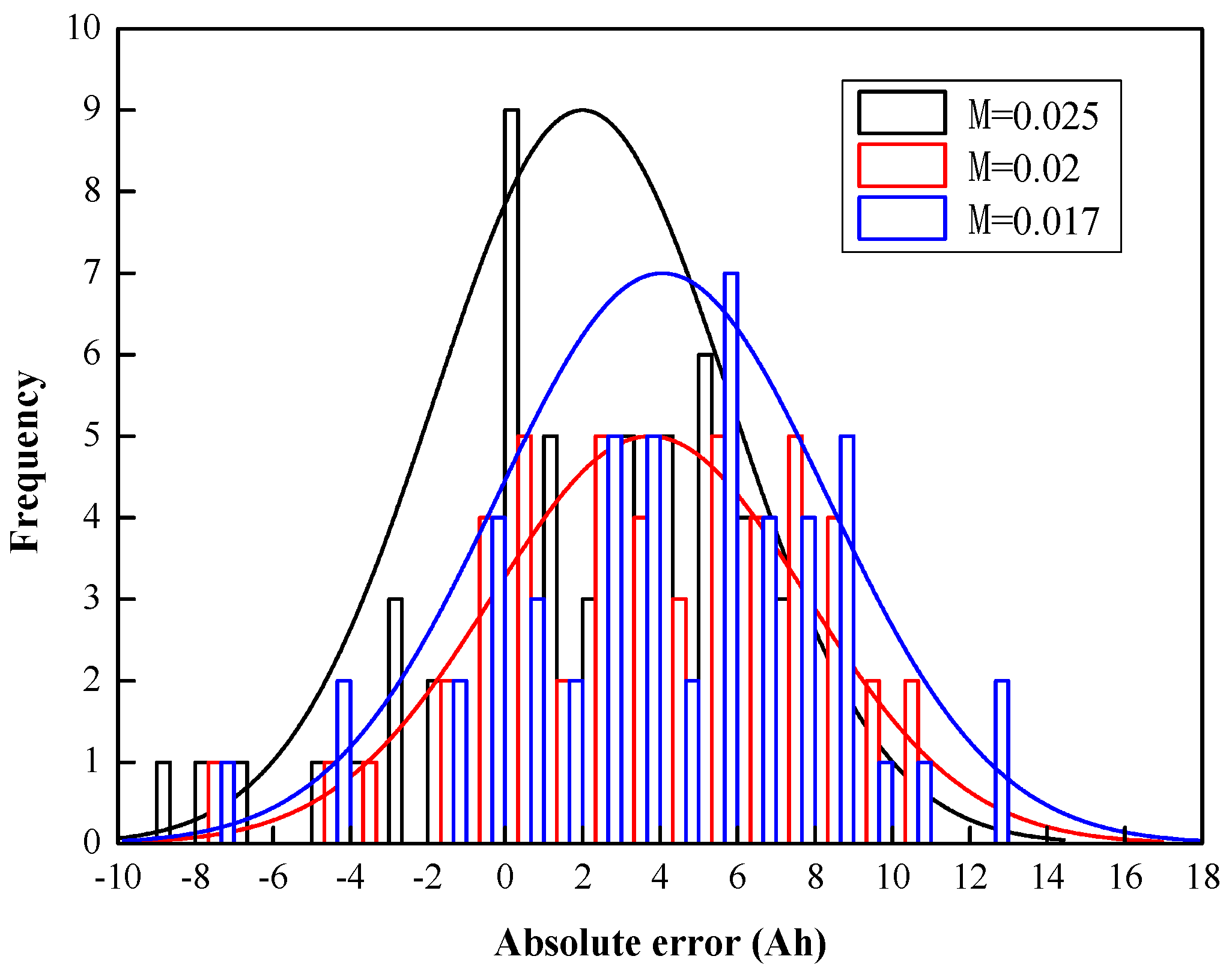
| Liminal value of robustness coefficient | Maximum absolute prediction error (A·h) | Maximum relative prediction error (%) | Absolute average error (A·h) | Relative average error (%) | The Percentage of relative error less than 5% | MSE |
|---|---|---|---|---|---|---|
| M = 0.017 | 12.911 | 6.367 | 4.891 | 2.431 | 94 | 34.386 |
| M = 0.02 | 10.736 | 5.294 | 4.593 | 2.282 | 96 | 30.146 |
| M = 0.025 | 8.431 | 4.241 | 3.598 | 1.792 | 100 | 18.300 |
| M = 0.03 | NA | NA | NA | NA | NA | NA |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mukherjee, N.; Strickland, D.; Cross, A.; Hung, W. Reliability estimation of second life battery system power electronic topologies for grid frequency response applications. In Proceedings of the IET International Conference on Power Electronics, Machines and Drives, Bristol, UK, 27–29 March 2012; pp. 1–6.
- Keeli, A.; Sharma, R.K. Optimal use of second life battery for peak load management and improving the life of the battery. In Proceedings of the IEEE International Electric Vehicle Conference, Greenville, SC, USA, 4–8 March 2012; pp. 1–6.
- Neubauer, J.; Pesaran, A. The ability of battery second use strategies to impact plug-in electric vehicle prices and serve utility energy storage applications. J. Power Sources 2011, 196, 10351–10358. [Google Scholar] [CrossRef]
- Viswanathan, V.V.; Meyer, M.K. Second use of transportation batteries: Maximizing the value of batteries for transportation and grid services. IEEE Trans. Veh. Technol. 2011, 60, 2963–2970. [Google Scholar] [CrossRef]
- Aylor, J.H.; Thieme, A.; Johnso, B.W. A battery state-of-charge indicator for electric wheelchairs. IEEE Trans. Ind. Electron. 1992, 39, 398–409. [Google Scholar] [CrossRef]
- Pascoe, P.E.; Anbuky, A.H. A unified discharge voltage characteristic for VRLA battery capacity and reserve time estimation. Energy Convers. Manag. 2004, 45, 277–302. [Google Scholar] [CrossRef]
- Huet, F. A review of impedance measurements for determination of the SOC or state of health of secondary batteries. J. Power Sources 1998, 70, 59–69. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Lee, J.; Cho, B.H. State-of-charge and capacity estimation of lithium-ion battery using a new open-circuit voltage versus state-of-charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Xiong, R.; Sun, F.; Chen, Z.; He, H. A data-driven multi-scale extended Kalman filtering based parameter and state estimation approach of lithium-ion polymer battery in electric vehicles. Appl. Energy 2014, 113, 463–476. [Google Scholar] [CrossRef]
- Kim, J.; Lee, S.; Cho, B.H. Complementary cooperation algorithm based on DEKF combined with pattern recognition for SOC/capacity estimation and SOH prediction. IEEE Trans. Power Electron. 2012, 27, 436–451. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Sun, F.; Zhao, K. Evaluation on state of charge estimation of batteries with adaptive extended Kalman filter by experiment approach. IEEE Trans. Veh. Technol. 2013, 62, 108–117. [Google Scholar] [CrossRef]
- Klass, V.; Behm, M.; Lindbergh, M. A support vector machine-based state-of-health estimation method for lithium-ion batteries under electric vehicle operation. J. Power Sources 2014, 270, 262–272. [Google Scholar] [CrossRef]
- Weigert, T.; Tian, Q.; Lian, K. State-of-charge prediction of batteries and battery-supercapacitor hybrids using artificial neural networks. J. Power Sources 2011, 196, 4061–4066. [Google Scholar] [CrossRef]
- Eddahech, A.; Brlat, O.; Vinassa, J.M. Adaptive voltage estimation for EV li-ion cell based on artificial neural networks state-of-charge meter. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), Hangzhou, Zhejiang, China, 28–31 May 2012; pp. 1318–1324.
- Yan, Z.; Wang, J. Model predictive control of nonlinear systems with unmodeled dynamics based on feedforward and recurrent neural networks. IEEE Trans. Ind. Inform. 2012, 8, 746–756. [Google Scholar] [CrossRef]
- Dai, S.L.; Wang, C.; Luo, F. Identification and learning control of ocean surface ship using neural networks. IEEE Trans. Ind. Inform. 2012, 8, 801–810. [Google Scholar] [CrossRef]
- Lin, H.T.; Liang, T.J.; Chen, S.M. Estimation of battery state of health using probabilistic neural network. IEEE Trans. Ind. Inform. 2013, 9, 679–685. [Google Scholar] [CrossRef]
- Shen, Y. Adaptive online state-of-charge determination based on neuro-controller and neural network. J. Power Sources 2010, 51, 1093–1098. [Google Scholar]
- Xia, C.; Guo, C.; Shi, T. A Neural-network-identifier and fuzzy-controller-based algorithm for dynamic decoupling control of permanent-magnet spherical motor. IEEE Trans. Ind. Electron. 2010, 57, 2868–2878. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Bertrand, N.; Delétage, J.Y.; Vinassa, J.-M. Behavior and state-of-health monitoring of Li-ion batteries using impedance spectroscopy and recurrent neural networks. Int. J. Electr. Power Energy Syst. 2012, 42, 487–494. [Google Scholar] [CrossRef]
- Mingant, R.; Bernard, J.; Moynot, V.S.; Delaille, A.; Mailley, S.; Hognon, J.-L.; Huet, F. EIS measurements for determining the SOC and SOH of Li-ion batteries. ECS Trans. 2011, 33, 41–53. [Google Scholar]
- Wilamowski, B.M. Neural network architectures and learning algorithms. IEEE Mag. Ind. Electron. 2009, 3, 56–63. [Google Scholar] [CrossRef]
- Zhang, C.P.; Zhang, C.N.; Liu, J.Z.; Sharkh, S.M. Identification of dynamic model parameters for lithium-ion batteries used in hybrid electric vehicles. High Technol. Lett. 2009, 16, 6–12. [Google Scholar] [CrossRef]
- Guo, L.D.; Gu, H.; Zhang, D.Q. Robust stability criteria for uncertain neutral system with interval time varying discrete delay. Asian J. Control. 2010, 12, 739–745. [Google Scholar]
- Liu, L.Z.; Wang, L.Y.; Chen, Z.Q.; Wang, C.S.; Lin, F.; Wang, H.B. Integrated system identification and state-of-charge estimation of battery systems. IEEE Trans. Energy Convers. 2013, 28, 12–23. [Google Scholar] [CrossRef]
- Ljung, L. System Identification: Theory for the User, 2nd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 1999. [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Jiang, J.; Zhang, W.; Wang, Y.; Sharkh, S.M.; Xiong, R. A Novel Data-Driven Fast Capacity Estimation of Spent Electric Vehicle Lithium-ion Batteries. Energies 2014, 7, 8076-8094. https://doi.org/10.3390/en7128076
Zhang C, Jiang J, Zhang W, Wang Y, Sharkh SM, Xiong R. A Novel Data-Driven Fast Capacity Estimation of Spent Electric Vehicle Lithium-ion Batteries. Energies. 2014; 7(12):8076-8094. https://doi.org/10.3390/en7128076
Chicago/Turabian StyleZhang, Caiping, Jiuchun Jiang, Weige Zhang, Yukun Wang, Suleiman M. Sharkh, and Rui Xiong. 2014. "A Novel Data-Driven Fast Capacity Estimation of Spent Electric Vehicle Lithium-ion Batteries" Energies 7, no. 12: 8076-8094. https://doi.org/10.3390/en7128076