1. Introduction
With the recent rapid development of electric vehicle technology, many countries and enterprises have invested heavily in developing electric vehicles (EVs). During the last year the total number of battery manufacturing companies in China reached 700–800. The development of power batteries is the key issue for the massive industrialization of electric vehicles. Battery performance greatly influences the driving mileage and reliability of EVs, hence, the characteristics of the produced batteries must be carefully evaluated. The common method of battery performance analysis is the charge/discharge test experiment. In order to improve the accuracy of test currents, most battery companies use the power-grid to supply the energy for charging tests. When performing the discharging test, to minimize the current ripple, the power transistors are forced to operate in the linear region instead of switching state to get high accuracy current test performance data, with a large power resistance adopted as the load; This discharged energy is totally wasted. According to the statistics from Chinese government, this power consumption can reach up to 736 gigawatt (GW). The corresponding economic loss of the wasted energy could reach up to 1.18 billion dollars.
To solve the above problems, Energy Recovery Power Battery Test Systems (ERPBTS) have been developed by some companies such as Aeroviroment and Bitrode Limited in the USA and Arbin and Digatron in Germany. Generally speaking, a qualified ERBTS should satisfy the following requirements:
- (1)
High-voltage and large-current output capability (such as 450 V/500 A, 225 kW).
- (2)
Full adjustable test voltage and current. Time response of adjustable current that ranges from zero to the command value should be kept within 15 ms, and load current should be held steady while performing internal resistance tests.
- (3)
High power factor on the grid side with low total harmonic distortion (THD).
- (4)
Reversible energy converting ability so that the discharged energy can be recovered to the power-grid with high efficiency.
Based on the aforementioned requirements, we have conducted ample research work. In [
1], parameter design and power flow control strategy of an energy recovery battery testing system were presented. Considering that harmonic distortion usually occurs for non-linear loads sharing the same AC-grid, a multi-functional ERPBTS is designed in [
2], in which the proposed scheme can simultaneously realize energy recovery and harmonic compensation with fast time response. Moreover, modeling and direct power control (DPC) of ERPBTS using an optimal switching table are discussed in [
3,
4], respectively.
If many battery testing systems (BTSs) are simultaneously used by a battery company, massive amounts of discharging energy can be recycled. However, we found that these instruments have not been practically adopted due to the following reasons.
Most enterprises focus on power circuit topology optimization and sophisticated control strategy for BTS. For massive grid-connected instruments in an AC-micro-grid, very few companies consider the energy saving issues as a whole.
In the utility, since the maximum output power of a single ERBTS can reach 250 kW, the associated instantaneous power input, when interfacing with the AC-grid, might cause an obvious rise and fall of the voltage at the point of common coupling (PCC). Moreover, if the test instrument is not well controlled, it might cause serious harmonic and voltage distortion problems on the nearby devices sharing the same grid. Because of these unresolved issues, the electric power department usually inhibits the interfacing of such high power ERPBTS to the AC-grid directly.
The conventional BTS has much lower energy recovery efficiency due to the complex composite power circuit topology which is usually composed by a bidirectional DC-DC converter and a bidirectional AC-DC converter with a fundamental frequency isolation transformer as the interface. Moreover, the conventional ERPBTS is very expensive. For a 200 kW testing system, the selling price can reach about 240,000 USD.
In recent years, due to its obvious advantages, the DC micro-grid system has received extensive attention in electric power systems. The DC micro-grid system is especially suitable for applications with renewable energy sources, such as photovoltaic (PV) energy, wind power, tidal energy, and geothermal energy. Compared with the conventional structure, the DC micro-grid system can achieve much higher efficiency and simpler power circuit topology due to the elimination of extra AC–DC and DC–AC conversion stages, since many renewable DGs, energy storage systems (ESSs) [
5], and an increasing number of loads directly utilize DC power. Additionally, the DC system offers improved controllability because the complex phase synchronization, and the reactive power compensation control problems intrinsic to the AC grid can be ignored [
6,
7]. Furthermore, the DC micro-grid can be fully decoupled from the utility grid by an interface converter, enabling the seamless transition between grid-connected and islanded operation modes [
8,
9,
10].
For the aforementioned reasons, the DC micro-grid is receiving increased attention, especially for small-scale commercial and residential applications [
11]. For AC and DC micro-grids, energy management control is one of the crucial points for micro-grid operation. The control objective is coordinating the distributed micro-grid terminals and to provide a simple, reliable, stable, and cost-effective power supply for both local customers and the utility. Much research work have been done to develop a standardized hierarchical power management framework [
12,
13,
14].
Considering the merits and demerits of the AC and DC micro-grid system, we found that very few papers describe the application of hybrid AC-DC micro-grid architecture in ERPBTS. Hence, this paper proposes a hybrid AC-DC micro-grid system based on ERPBTS, and the proposed scheme resolves the above drawbacks of the conventional scheme. In the proposed system, the converter for battery testing is a current-feed DC-DC converter, and all the testing instruments are connected to a DC-bus, to form a DC-micro-grid system [
15,
16]. In this way, the recovered energy can be reused in other local loads, which increase the system efficiency and simplify the control strategy for a DC-micro-grid.
This paper is arranged as follows: in
Section 2, we explain the system configuration and operation principles of conventional ERPBTS based on an AC micro-grid. In
Section 3, the system configuration of a hybrid AC-DC micro-grid for ERPBTS is illustrated. The topology and energy flow chart comparisons chart between the conventional AC and proposed hybrid AC-DC micro-grids are elaborated. In
Section 4, an optimal energy management control scheme and the stability of the proposed system are analyzed. The corresponding experimental results are also presented. Finally, in
Section 5, the main contributions of this paper are summarized and suggested future work is also presented.
2. System Configuration of the Conventional ERPBTS
In this section, we first illustrate the system configuration of the conventional scheme. Then, control strategies for an AC micro-grid are presented, and drawbacks of the direct AC-micro-grid are also shown.
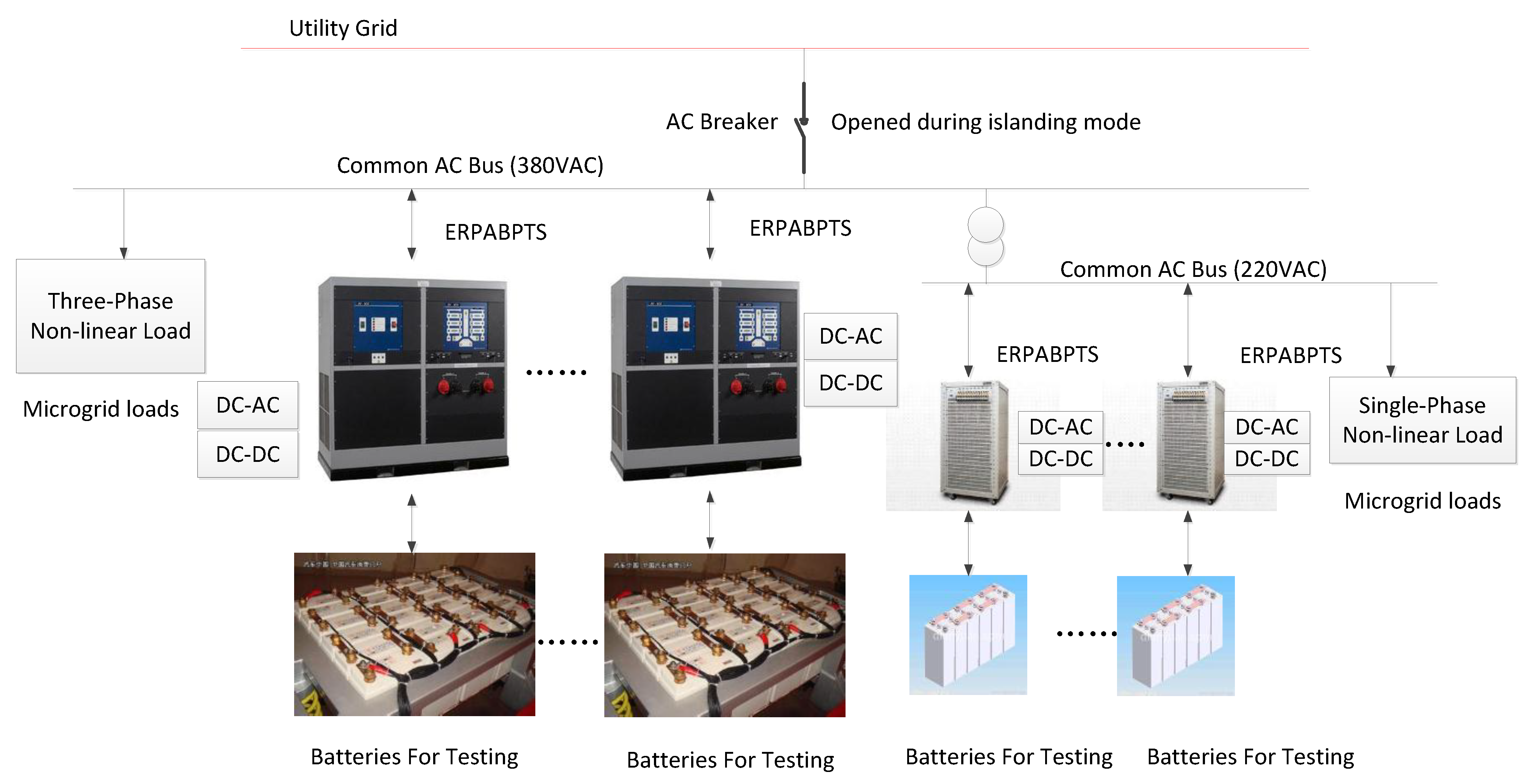
Figure 1 demonstrates the block diagram of the massive AC-grid-connected ERPBTS, in which the red line represents the main power grid. The black line symbolizes the local micro-grid (AC 380 V), dividing the testing area into two sections. The high-power testing instruments are connected to the high AC-voltage (380 VAC) side, and relatively low-power test instruments are interconnected on the single-phase (220 VAC) side. Each section contains a bidirectional AC–DC–DC converter and the series-connected battery packs. The configurations show that all the testing instruments are connected in parallel to form an AC-micro-grid. Reactive power, power quality, reliability and frequency control are the main issues in this system.
In this way, the battery testing instrument fulfills the battery testing and energy recovery requirements. The discharged energy produced during the testing procedure is recycled to the other loads sharing the AC-grid.
Figure 1.
System configuration of conventional AC micro-grid based on ERPBTS.
Figure 1.
System configuration of conventional AC micro-grid based on ERPBTS.
Figure 1 demonstrates the configuration of the AC micro-grid systems, which contains the AC 380 and AC 220 V systems. The popular ways of voltage/current reference signals generation for power electronics converter in an AC-micro-grid are summarized below.
- (1)
The first solution uses a master-slave controller, in which a master controller is used to communicate with all sources using a fast communication technique. All micro-sources (grid-connected converters) inform the master controller of the current status of their local variables (such as voltage/current, frequency,
etc.). Based on that information, the master controller computes and transmits the reference voltage/current and frequency values for all the sources. The requirement of a fast communication technique increases the cost of the whole system. Moreover, the reliability of the system is reduced due to the presence of an additional communication circuit and the master controller [
17].
- (2)
The second method uses a droop controller and measures only the local variables of a source to calculate the reference/current signal of the power converter. This decentralized control scheme does not need a fast communication system between grid-connected converters for operation and has the merits of high reliability, low cost, and easy scalability. Because of these advantages, droop controller is extensively adopted in AC micro-grids.
Compared with the AC-micro-grid, the DC micro-grid has many advantages. First, it does not require synchronous or frequency tracking control and so is more reliable, controllable, and suitable for distributed generation system (DGs). Secondly, in DC micro-grid systems, compared with a cascaded power converter, the topology of the one-stage power converter is much simpler, resulting in much higher energy recovery efficiency. Thirdly, the load voltage is not influenced by voltage regulation, voltage dropdown, or unbalanced loads. Finally, the DC-voltage in transmission is not influenced by the impulse current; thus, there is no need to consider the line reactive power component, and the line power loss can be ignored. Therefore, combining a DC micro-grid with an AC micro-grid to form a hybrid AC–DC micro-grid can solve both the efficiency and energy balance problems for ERPBTS.
3. A Hybrid AC–DC Micro-Grid System for ERPBTS
In this section, a hybrid AC–DC micro-grid battery testing system is proposed. System configuration, operation principle, and merits of the proposed scheme are elaborated.
3.1. System Configuration
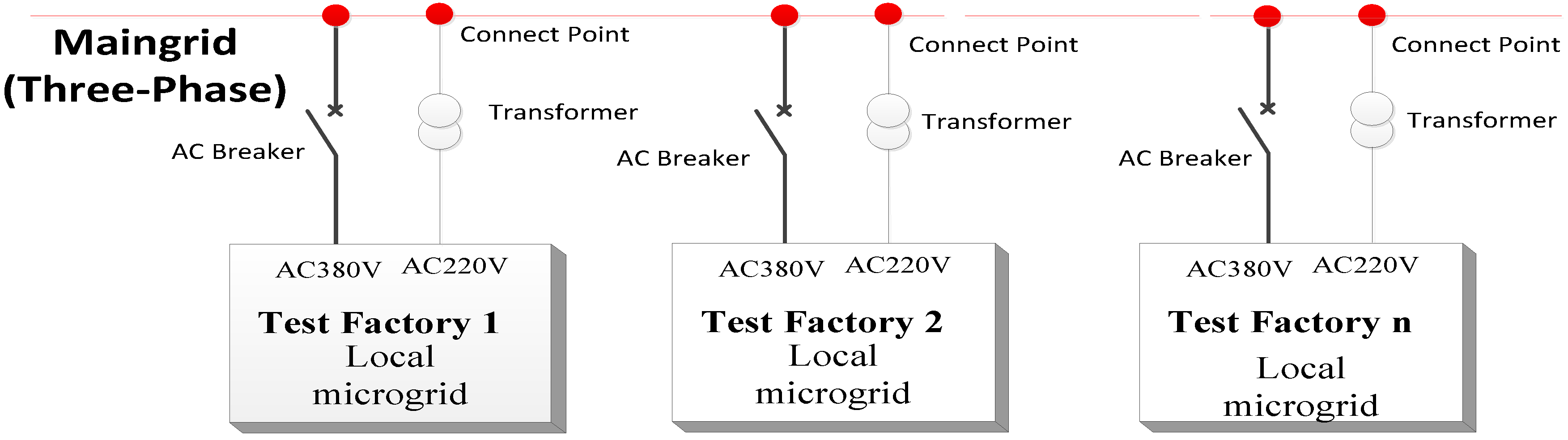
Figure 2 illustrates the layout of the hybrid AC–DC micro-grid based on ERPBTS. The configuration is established based on the assumption that all the battery factories are connected to the utility grid and share a common micro-grid. Seen from the outside, each test factory interfaced with the main grid can be regarded as a module. Each battery test factory is regarded as the local microgrid, interfaced with the main grid via an AC-breaker. Hence, seen from the grid-side, all the battery factories form the AC-microgrid.
Figure 2.
The hybrid AC–DC micro-grid layout based on ERPBTS.
Figure 2.
The hybrid AC–DC micro-grid layout based on ERPBTS.
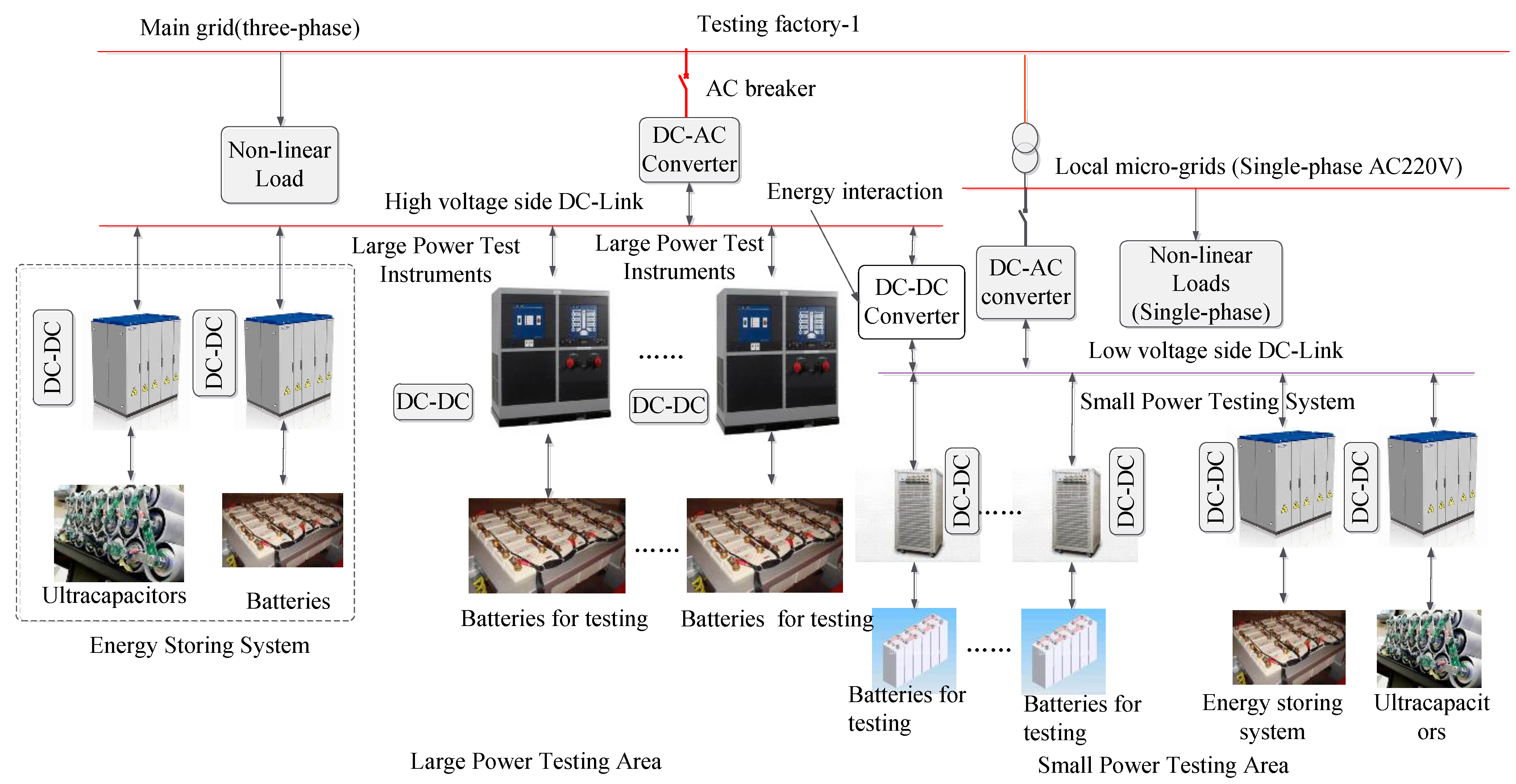
The internal configuration of a representative factory is shown in
Figure 3, showing that the testing instruments forms a DC micro-grid containing two-level DC-link voltage (high and low DC-link voltage). The large power testing instruments are connected on the high voltage side; the relatively small power output testing instruments are connected at the low voltage side. Moreover, a DC–DC converter (blue color in
Figure 3) is inserted between high and low DC-links for bidirectional energy transmission.
Figure 3.
Architecture of the multiple converters with hierarchal DC-link voltage configuration in the micro-grid.
Figure 3.
Architecture of the multiple converters with hierarchal DC-link voltage configuration in the micro-grid.
In order to support the stability of the DC-link voltage, an ultracapacitor-battery composite power supply system is adopted in the proposed system, and the composite energy storing system (ESS) can satisfy the stable and peak power needs. In addition, since the half-bridge DC–DC converter in this system usually operates as a current-source converter, the operation condition of the DC micro-grid can be dominated by ESS for power balance.
A bidirectional DC–AC converter is inserted between the main grid and the DC-micro-grid in case the ESS and battery testing instrument reserves are not adequate to meet the demands of the local loads. In such circumstances, the deficit can be compensated by importing the energy from the utility; On the other hand, excess energy reserve of the ESS and battery testing instruments leads to unbalance in the DC-link power, and the additional energy can be exported to the utility. Generally speaking, the DC–AC converter functions as a utility interface converter to maintain the power balance within the DC-micro-grid.
3.2. Topology Comparison
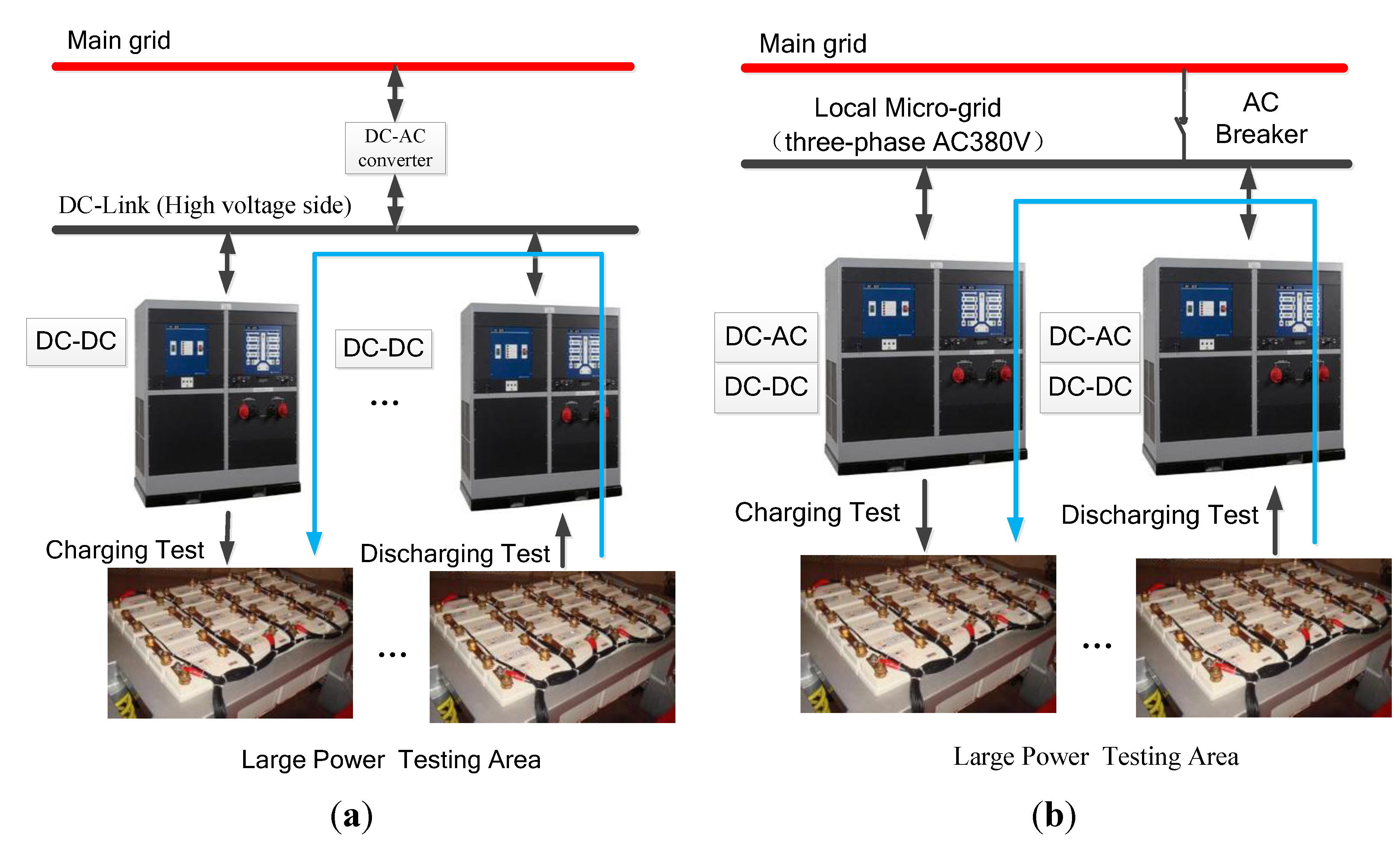
Figure 4 illustrates the operation principle comparisons between the conventional and proposed schemes used for battery testing instruments. The comparison results show that the proposed scheme has at least three distinct advantages:
- (1)
In the conventional AC micro-grid system based on ERPBTS, the internal power converter topology is composed of DC–DC and DC–AC converters connected in series. Thus, the two systems are strongly coupled; a decoupler control algorithm is needed if no energy storing system is interfaced with the DC-link. However, the power converter in the proposed scheme is composed of a single DC–DC converter, resulting in considerably high accuracy and energy recovery efficiency. Moreover, since the topology of the converter is greatly simplified, the amount of software operations is considerably reduced, and reliability of the testing instrument is maximally enhanced.
- (2)
In conventional ERBTS, the inverter is controlled to synchronize with the power-grid on phase angle, frequency, and amplitude. In addition, in order to eliminate the total harmonic distortion (THD) of the grid-connected inverter, a complicated current filter (such inductance-capacitance-inductance (LCL) type filter) is usually implemented, requiring complex closed-loop control algorithms. In the proposed scheme, only the DC-link voltage should be maintained stable and constant, resulting in a much simpler structure of the proposed micro-grid.
- (3)
In the proposed scheme, the energy interactions between different testing instruments can be completed in a single stage (DC micro-grid), However, the conventional scheme needs at least two stages. Hence, the proposed scheme is much simpler, and the total expense of the proposed scheme can be greatly reduced.
Figure 4.
Energy chart between the conventional and proposed architectures. (a) Proposed architecture; and (b) Conventional architecture.
Figure 4.
Energy chart between the conventional and proposed architectures. (a) Proposed architecture; and (b) Conventional architecture.
4. Energy Management Strategy of a DC Micro-grid Based on ERPBTS and an Energy Storage System
4.1. Energy Optimal Control
For an AC micro-grid system, the crucial points for its operation are intelligent control and management. The control objective is to coordinate the distributed micro-grid terminals in order to mitigate the power intermittency and uncertainty. To provide a stable, reliable, and economic power supply for both local customers and the utility, a series of control strategies have been published for AC micro-grids. Yet, the control strategies for AC-micro-grid cannot be simply migrated to DC micro-grids due to the aforementioned special features of the DC system.
Like an AC-grid, the control methods for a DC micro-grid system can also be categorized into two classes of centralized and decentralized control structures. For centralized control, all the micro-source converters sharing the same DC-bus are controlled by a central energy controller through a communication link (such as CAN-bus). A data center (server) is needed for acquiring the information of voltage, current, and the node address of each converter. This solution has the drawbacks of limited nodes on power converters, difficulty expanding the nodes, need for an additional central controller, and a required hardware circuit for fast communication.
Compared with the centralized solution, a decentralized control structure is proposed in which all the distributed terminals operate independently, and the control decisions are made based on local information [
18]. The common droop control methods used in DC micro-grids for power management are Voltage/Current (V/I) and Voltage/Power (V/P) control. The core issue for V/I and V/P control methods is using the deviation of DC-bus voltage for autonomous power sharing among different power sources [
19]. The limitation of the V/I and V/P schemes is that all the terminals sharing the same DC bus have to rigidly follow the preset droop curves without a flexible mode transition mechanism, especially when a voltage change occurs in the DC micro-grid [
20].
From [
5], when the DC-link voltage is regulated by different power sources, the operation modes for the proposed system are: (a) Utility-dominating mode; (b) Energy storage system-dominating mode; (c) Battery testing instruments-dominating mode. Hence, a seamless transition from one dominating mode to another according to the DC-bus voltage deviation is the key issue. Power variables of different terminals can be defined as:
PESS_CH, PESS_DSC—The maximum charging and discharging power values, these values are determined by the status of charge (SOC) in the energy storage system; if the SOC of batteries and the ultra-capacitor is zero, this means that the ESS is fully discharged, PESS_DSC = 0.
Vdcbus—DC-bus voltage;
Pload—Local load power consumption, including the linear and non-linear loads sharing the same DC-bus;
Vupper, Vlower—Threshold DC-link voltages for the operation modes.
PBTS_CHG, PBTS_DSC—The total charging power input and discharging power output of ERPBTS.
The characteristics of each dominating mode determined by the DC-link voltage range are listed in
Table 1, which shows that the power characteristics of each terminal determines the rise and fall of the DC-link voltage. In mode I, when the DC-link voltage falls below the lower limit, the utility will dominate the DC-link voltage. In mode II, when the DC-link voltage falls between the upper and lower voltage limits, the battery-ultracapacitor energy storage system will dominate the DC-link voltage. In mode III, when there is redundant power output to charge the capacitors and give rise of the DC-link voltage, the ERPBTS will dominate the DC-bus.
Table 1.
Energy optimal scheme for hybrid AC-DC microgrid.
Table 1.
Energy optimal scheme for hybrid AC-DC microgrid.
| Dominating Mode | Power Characteristics | Voltage Range | DC-link Voltage Regulation |
|---|
| Utility (Mode I) | Pload + PBTS_CHG + PESS_CH > PESS_DSC + PBTS_DSC | Vdcbus < Vlower | Utility Units |
| ESS (Mode II) | PESS_CH < Pload + PBTS_CHG − PBTS_DSC < PESS_DSC | Vlower < Vdcbus < Vupper | ESS Units |
| ERBTS (Mode III) | PBTS_DSC > Pload + PBTS_CHG + PESS_CH − PESS_DSG | Vdcbus > Vupper | ERPBTS Units |
4.2. Experimental Results
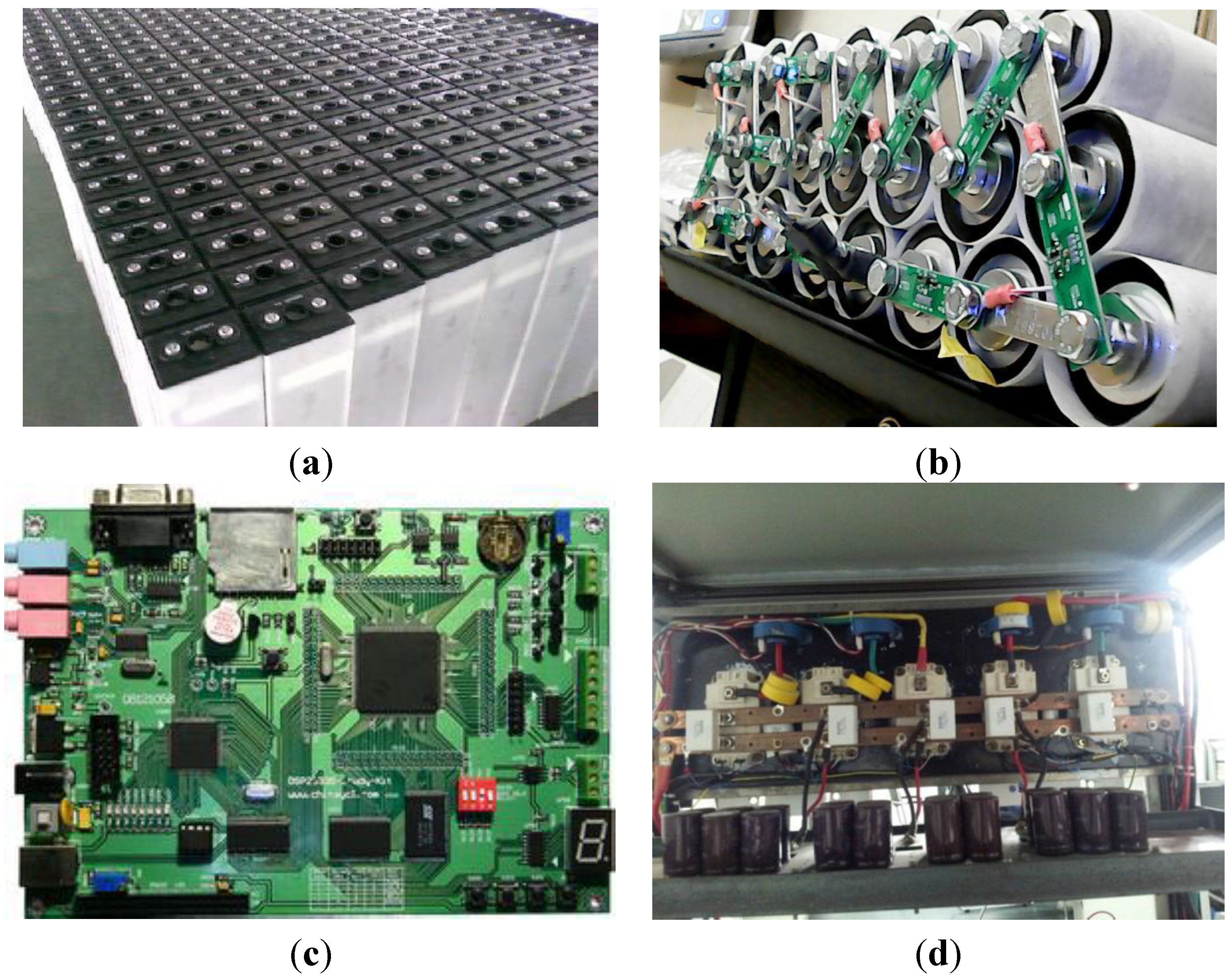
In order to verify the stable behavior of the proposed configuration and droop-controlled strategy, a scaled-down laboratory prototype of a three-node, three-branch DC-micro-grid is developed. The component specifications used in experiment are illustrated in
Figure 5. The schematic diagram of this system in which each micro-source converter is a DC–DC converter is illustrated in
Figure 2.
Figure 5.
Hardware setup of the proposed scheme. (a) Batteries for testing; (b) Ultra-capacitors for energy storing system (ESS); (c) DSP control board; (d) AC–DC converter for utility dominating operation.
Figure 5.
Hardware setup of the proposed scheme. (a) Batteries for testing; (b) Ultra-capacitors for energy storing system (ESS); (c) DSP control board; (d) AC–DC converter for utility dominating operation.
Specifications of the bidirectional DC–DC and AC–DC converters are given in
Table A1 and
Table A2 in the
Appendix. The core controller (CPU) chosen for implementation of voltage and current droop control algorithm is the TMS320F28335 from Texas Instruments (Dallas, TX, USA).
The experimental hardware setup for the proposed hybrid AC–DC micro-grid contains four parts (refer to
Table 2): (1) The utility grid that contains a three-phase voltage source converter (VSC) with isolation transformer; (2) Two bidirectional DC–DC converters for the ESS system; (3) Two bidirectional DC–DC converters for the battery testing systems, one for charging, another for discharging; and (4) Two power resistors serves as the loads.
Table 2.
List of the all the terminals used in experiments.
Table 2.
List of the all the terminals used in experiments.
| Energy Source | Converter Type | Rated Power | Quantity |
|---|
| Utility Grid | Three-phase voltage source inverter with isolation transformer | 30 kW | 1 |
| Ultracapacitor-Battery Energy storing System (ESS) | Bidirectional DC–DC converter for batteries + Bidirectional DC–DC converter for ultra-capacitors | 5.0 kW | 2 |
| ERPBTS | Bidirectional DC–DC converter | 15 kW | 2 |
| Loads | Power resistors | 3 kW | 2 |
For safety considerations, the conventional 380 V three-phase AC distribution system is reduced to a 75 V three-phase AC-grid using a step-down transformer; the DC-bus voltage of the tested DC micro-grid system is set between 200 and 250 V. The corresponding voltage of each operation mode is allocated within this range. The thresholds of the DC-bus voltage range are listed in
Table 3.
Table 3.
DC-link voltage range definition for each operation mode.
Table 3.
DC-link voltage range definition for each operation mode.
| Operation Mode | (Mode I) | (Mode II) | (Mode III) |
|---|
| DC-bus Voltage | <200 | 200~250 V | >250 V |
Table 3 gives the operation mode definition for each operation mode, totally, there are three operation modes.
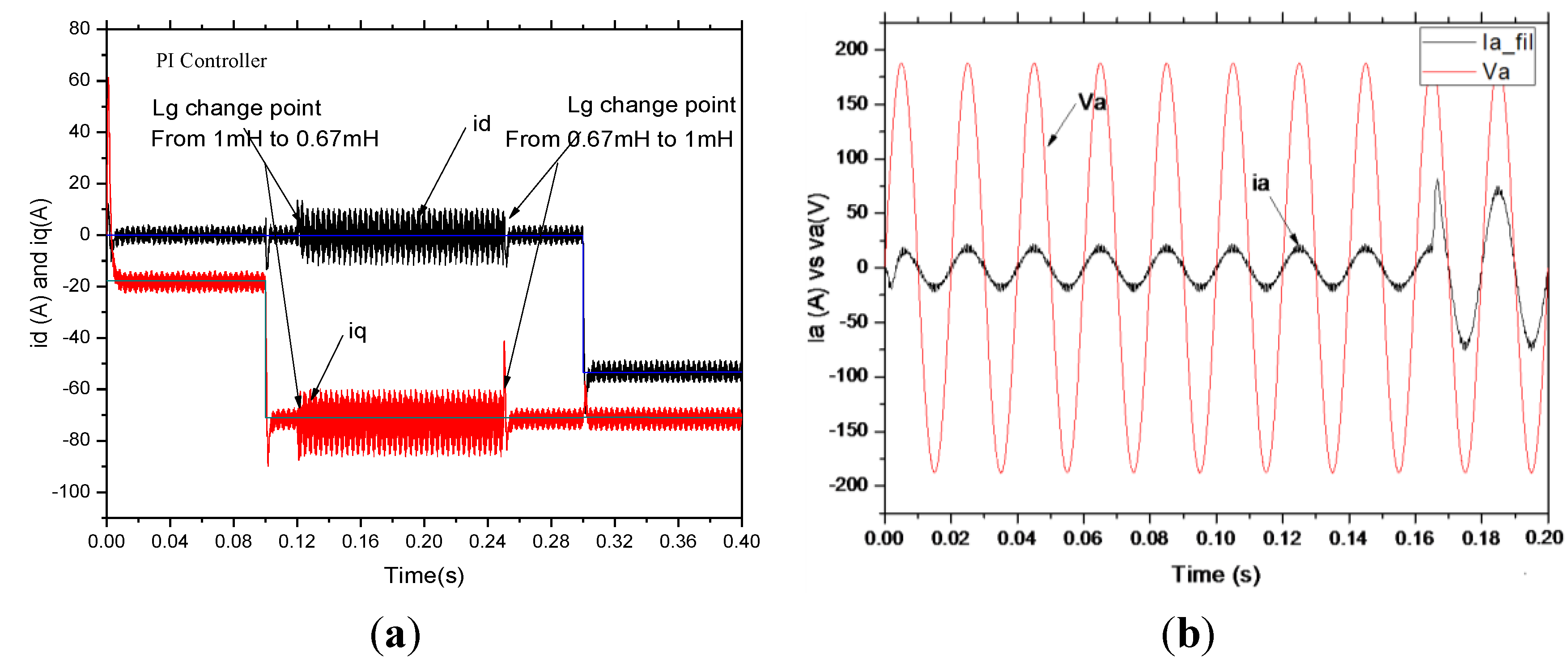
Figure 6.
(a) Waveforms of the active and reactive current components when the DC micro-grid is interfacing with the AC micro-grid. (b) Waveforms of the phase voltage and current at the point of common coupling.
Figure 6.
(a) Waveforms of the active and reactive current components when the DC micro-grid is interfacing with the AC micro-grid. (b) Waveforms of the phase voltage and current at the point of common coupling.
Table 1 shows that, when the DC-bus voltage falls below the lower limit
Vlower, the DC-bus will be dominated by the utility grid via a voltage source converter (VSC) that operates as a PWM rectifier.
Figure 6a illustrates the waveforms of active and reactive current components when the DC micro-grid is interfacing with the AC micro-grid using unit power factor control (PFC) method.
Figure 6b shows the phase voltage and phase current of the VSC rectifier when there is a deficit in power needs in a DC micro-grid. By dynamically controlling the reactive current component, the DC-bus voltage is maintained stable (in mode I).
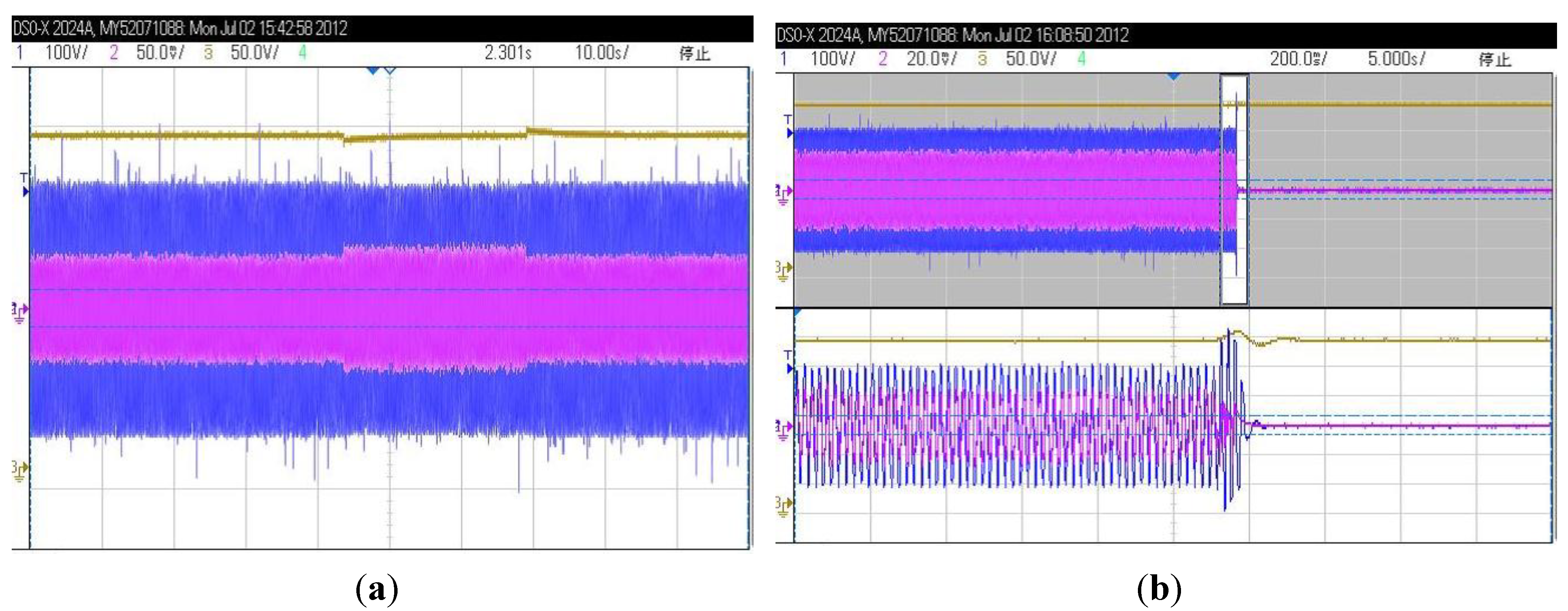
Figure 7a illustrates the dominating mode transition process of the three-phase converter (from mode II to mode I) when the DC micro-grid initially operates in ESS storage-dominating mode for charging testing. When a power deficit occurs, the domination mode will automatically change to mode I, and the utility will compensate the additional power needs.
Figure 7b demonstrates the dominating mode transition process of the three-phase VSC converter (from grid connected mode to islanded mode).
Figure 7.
(a) Waveform of the converter switching from grid-connected mode to rectifier mode; (b) Waveform of the converter switching from grid-connected mode to islanded operation mode.
Figure 7.
(a) Waveform of the converter switching from grid-connected mode to rectifier mode; (b) Waveform of the converter switching from grid-connected mode to islanded operation mode.
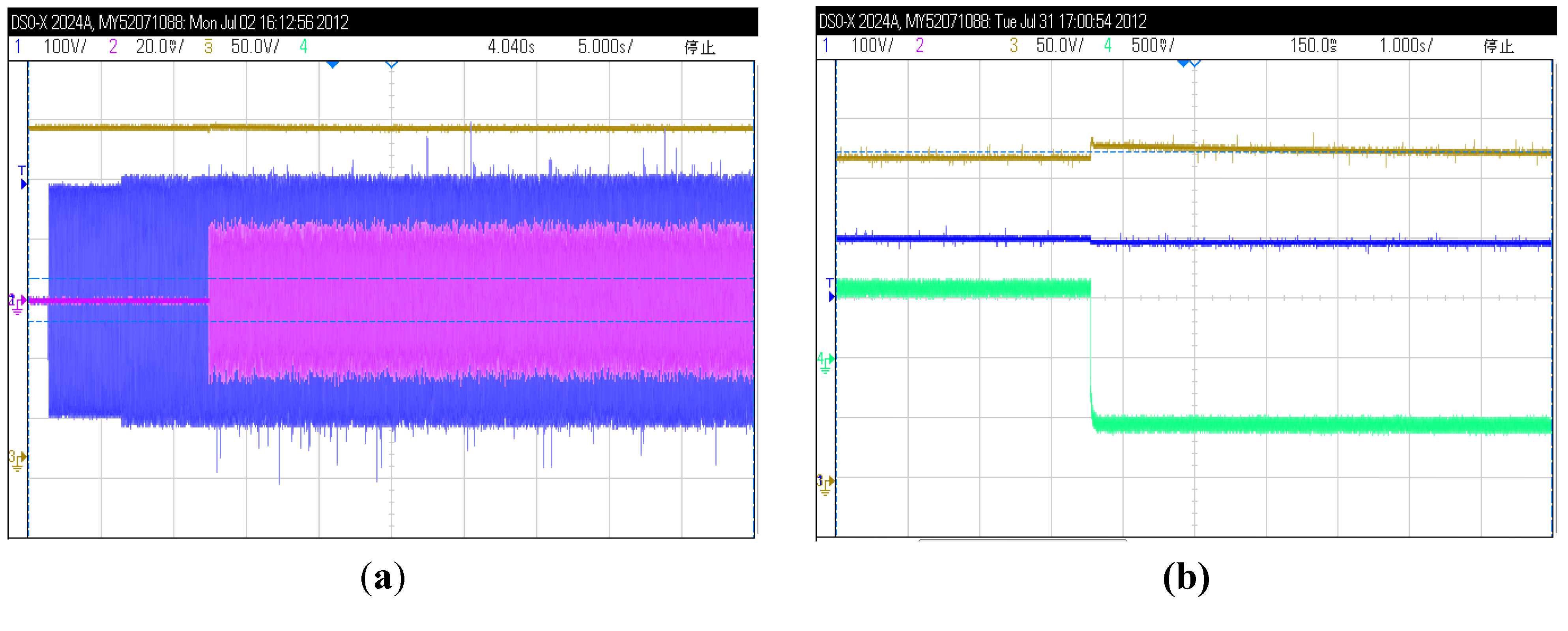
Figure 8a shows the transition process of the utility-dominating mode switching from islanded mode to grid connected mode. The battery charging current in ERPBTS is illustrated in
Figure 8b, showing that the dominating mode of dc-link voltage in dc-micro-grid changes from utility-dominating mode to ERPBTS-dominating mode. In this case, the DC-bus voltage
Vdcbus is greater than the upper limit of reference voltage
Vupper (
Vdcbus >
Vupper), implying sufficient power output in the DC-link. This additional energy will automatically charge the capacitors and increase the DC-bus voltage, ultimately resulting in a high voltage breakdown of the power transistors. Therefore, in order to release the additional energy, the operation mode of ERPBTS should be changed from discharging mode to charging mode.
Figure 8b shows the waveform of mode transition when the battery test current changes from +20 A (discharging current) to −20 A (charging current). The experimental results show that the proposed scheme is feasible and applicable.
Figure 8.
(a) Waveform of the AC-DC converter switching from islanded mode to grid-connected mode; (b) Waveform of the battery charging current.
Figure 8.
(a) Waveform of the AC-DC converter switching from islanded mode to grid-connected mode; (b) Waveform of the battery charging current.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



