
Software-Based Wireless Power Transfer Platform for Various Power Control Experiments

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Proposed System Architecture

2.1. Circuit Part Design


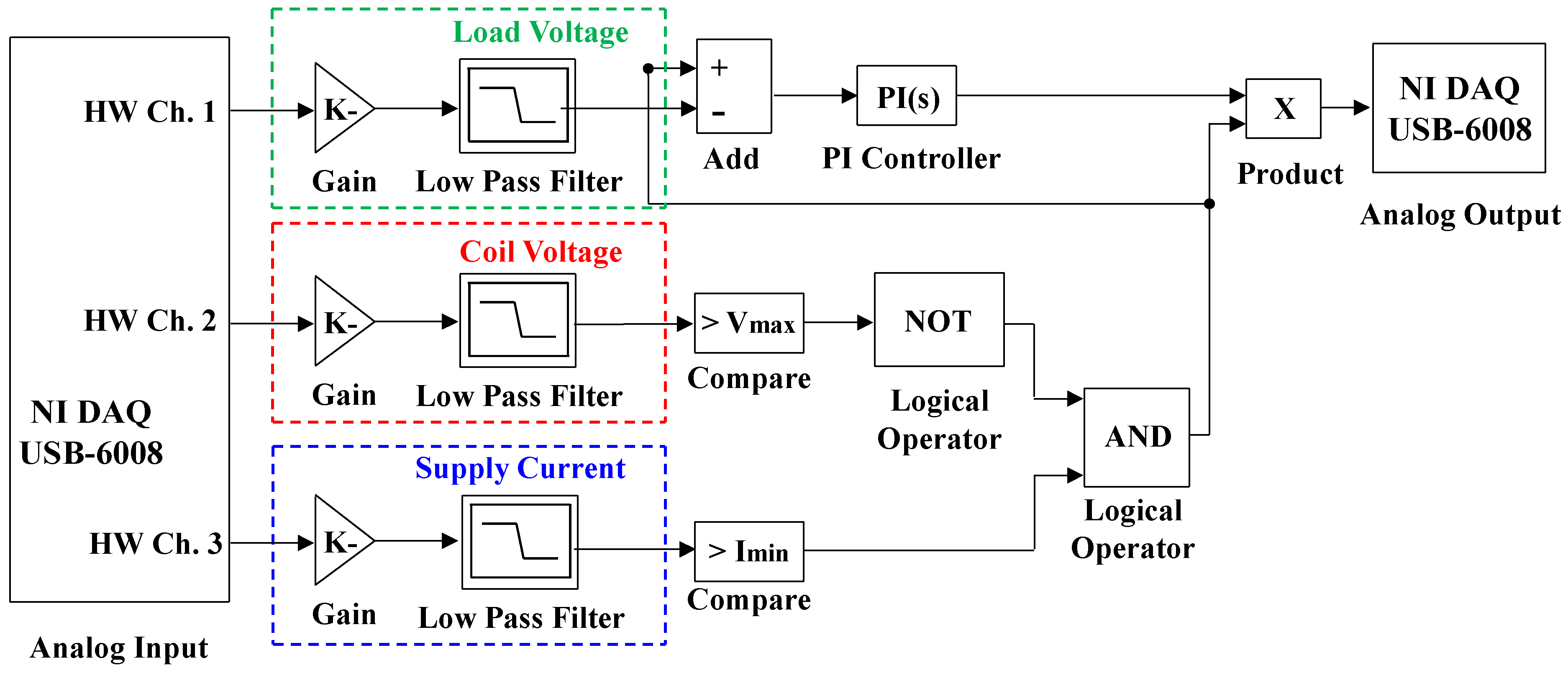
2.2. Control Part Design


3. Power Control Experiments

3.1. Load and Metal Detection: Open-loop Control


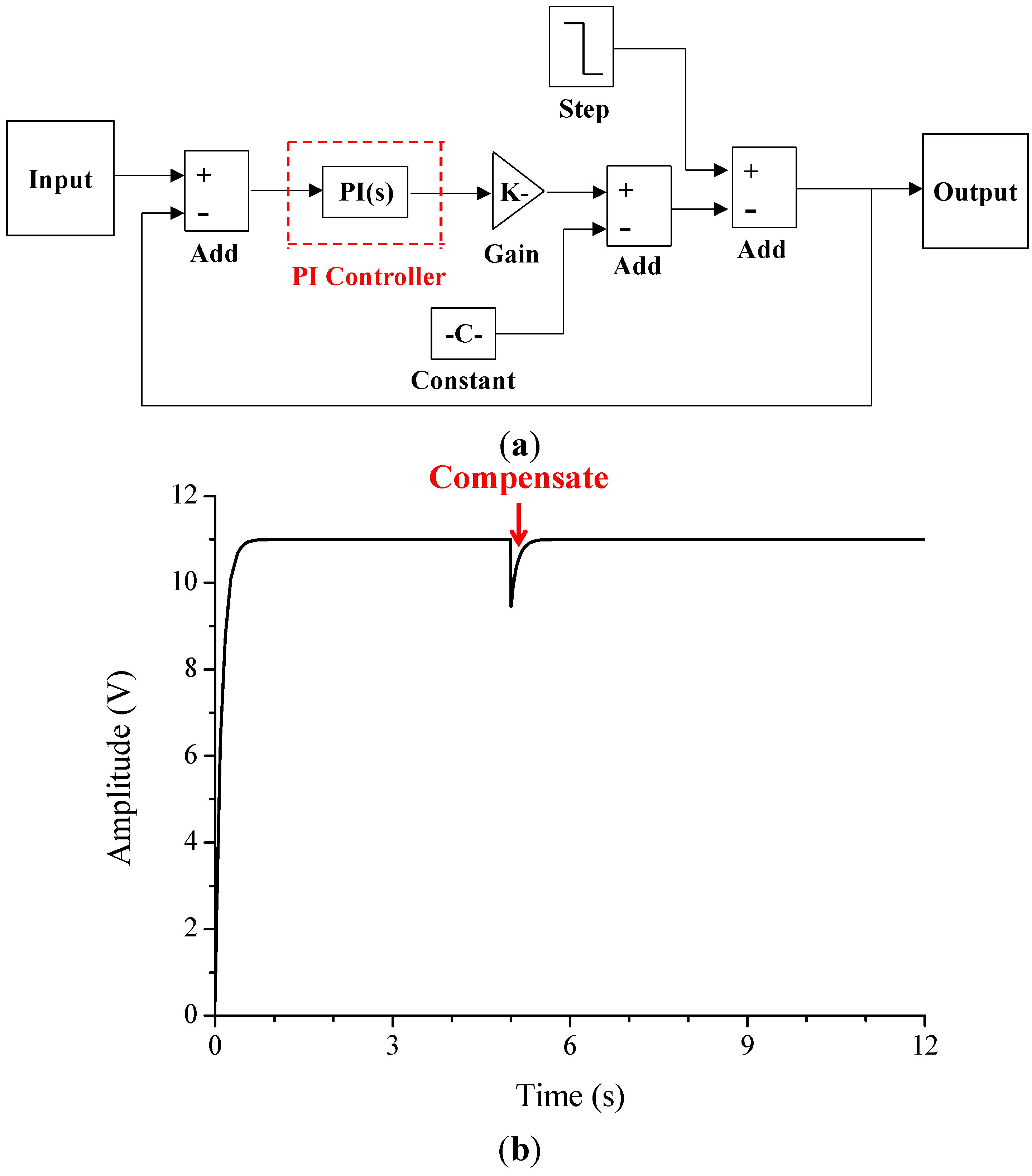
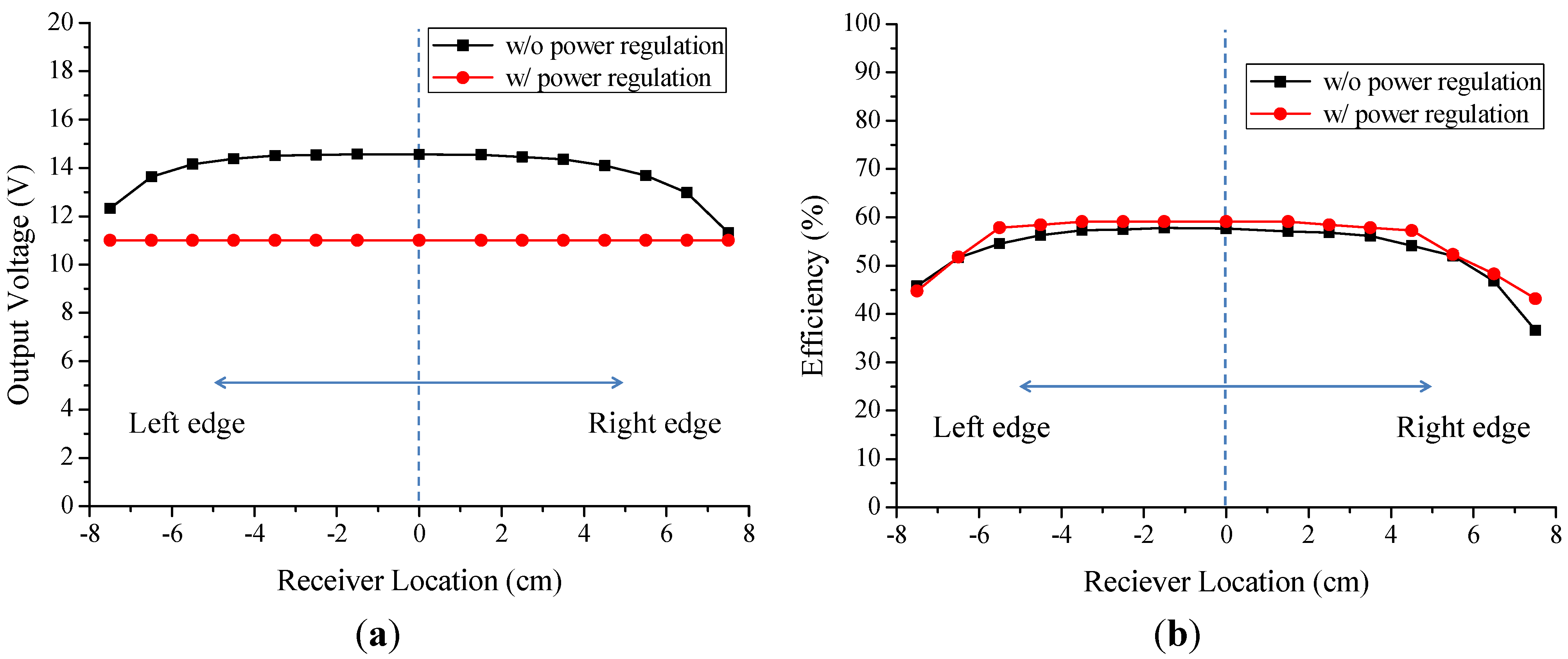
3.2. Output Voltage Regulations: Closed-Loop Control



4. Conclusions
Author Contributions
Conflicts of Interest
References
- Puccetti, G.; Reggiani, U.; Sandrolini, L. Experimental analysis of wireless power transmission with spiral resonators. Energies 2013, 6, 5887–5896. [Google Scholar] [CrossRef]
- Wei, X.; Wang, Z.; Dai, H. A critical review of wireless power transfer via strongly coupled magnetic resonances. Energies 2014, 7, 4316–4341. [Google Scholar] [CrossRef]
- Puccetti, G.; Stevens, C.J.; Reggiani, U.; Sandrolini, L. Experimental and numerical investigation of termination impedance effects in wireless power transfer via metamaterial. Energies 2015, 8, 1882–1895. [Google Scholar] [CrossRef]
- Johns, B. An introduction to the Wireless Power Consortium standard and TI’s compliant solutions. Analog Appl. J. Q 2011, 1, 10–12. [Google Scholar]
- Krikidis, I.; Timotheou, S.; Nikolaou, S.; Zheng, G.; Ng, D.W.K.; Schober, R. Simultaneous wireless information and power transfer in modern communication systems. IEEE Commun. Mag. 2014, 52, 104–110. [Google Scholar] [CrossRef] [Green Version]
- Ng, D.W.K.; Schober, R. Secure and green SWIPT in distributed antenna networks with limited backhaul capacity. IEEE Trans. Wirel. Commun. 2015. [Google Scholar] [CrossRef]
- Low, Z.N.; Casanova, J.J.; Maier, P.H.; Lin, J. Method of load/fault detection for loosely coupled planar wireless power system with power delivery tracking. IEEE Trans. Ind. Electron. 2010, 57, 1478–1486. [Google Scholar]
- Zhong, W.X.; Hui, S.Y.R. Maximum energy efficiency tracking for wireless power transfer systems. IEEE Trans. Power Electron. 2015, 30, 4025–4034. [Google Scholar] [CrossRef]
- Fu, M.; Yin, H.; Zhu, X.; Ma, C. Analysis and tracking of optimal load in wireless power transfer systems. IEEE Trans. Power Electron. 2015, 30, 3952–3963. [Google Scholar] [CrossRef]
- Yin, J.; Lin, D.; Lee, C.K.; Hui, S.Y.R. A systematic approach for load monitoring and power control in wireless power transfer systems without any direct output measurement. IEEE Trans. Power Electron. 2015, 30, 1657–1667. [Google Scholar] [CrossRef]
- Chaimanonart, N.; Zimmerman, M.D.; Young, D.J. Adaptive RF power control for wireless implantable bio-sensing network to monitor untethered laboratory animal real-time biological signals. In Proceedings of the 2008 IEEE Sensors Conference, Lecce, Italy, 26–29 October 2008; pp. 1241–1244.
- Wang, G.; Liu, W.; Sivaprakasam, M.; Kendir, G.A. Design and analysis of an adaptive transcutaneous power telemetry for biomedical implants. IEEE Trans. Circuits Syst. 2005, 52, 2109–2117. [Google Scholar] [CrossRef]
- Kim, J.; Choi, W.S.; Jeong, J. Loop switching technique for wireless power transfer using magnetic resonance coupling. Prog. Electromagn. Res. 2013, 138, 197–209. [Google Scholar] [CrossRef]
- Si, P.; Hu, A.P.; Hsu, J.W.; Chiang, M.; Wang, Y.; Malpas, S.; Budgett, D. Wireless power supply for implantable biomedical device based on primary input voltage regulation. In Proceedings of the 2nd IEEE Conference on Industrial Electronics and Applications, Harbin, China, 23–25 May 2007; pp. 235–239.
- Jang, B.J.; Lee, S.; Yoon, H. HF-band wireless power transfer system: Concept, issues, and design. Prog. Electromagn. Res. 2012, 124, 211–231. [Google Scholar] [CrossRef]
- Kiani, M.; Ghovanloo, M. An RFID-based closed-loop wireless power transmission system for biomedical applications. IEEE Trans. Circuits Syst. II Express Briefs 2010, 57, 260–264. [Google Scholar] [CrossRef] [PubMed]
- Restle, R.C. Choosing between DSPs, FPGAs, μPs and ASICs to implement digital signal processing. In Proceedings of the ICSPAT: DSP World, Dallas, TX, USA, 16–19 October 2000.
- Sudhakar, Y. VHDL Starter’s Guide; Prentice-Hall: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- Kruger, H.; Lotter, T.; Enzner, G.; Vary, P. A PC based platform for multichannel real-time audio processing. In Proceedings of the International Workshop on Acoustic Echo and Noise Control (IWAENC2003), Kyoto, Japan, 8–11 September 2003; pp. 195–198.
- Low, Z.N.; Chinga, R.A.; Tseng, R.; Lin, J. Design and test of a high-power high-efficiency loosely coupled planar wireless power transfer system. IEEE Trans. Ind. Electron. 2008, 56, 1801–1812. [Google Scholar]
- Raab, F.H. Effects of circuit variations on the class E tuned power amplifier. IEEE J. Solid-State Circuits 1978, 13, 239–247. [Google Scholar] [CrossRef]
- Casanova, J.J.; Low, Z.N.; Lin, J.; Tseng, R. Transmitting coil achieving uniform magnetic field distribution for planar wireless power transfer system. In Proceedings of the IEEE Radio Wireless Symposium (RWS’09), San Diego, CA, USA, 18–22 January 2009; pp. 530–533.
- Casanova, J.J.; Low, Z.N.; Lin, J. Design and optimization of a Class-E amplifier for a loosely coupled planar wireless power system. IEEE Trans. Circuits Syst. II Express Briefs 2009, 56, 830–834. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, S.-H.; Kang, C.G.; Son, Y.-H.; Jang, B.-J. Software-Based Wireless Power Transfer Platform for Various Power Control Experiments. Energies 2015, 8, 7677-7689. https://doi.org/10.3390/en8087677
Hwang S-H, Kang CG, Son Y-H, Jang B-J. Software-Based Wireless Power Transfer Platform for Various Power Control Experiments. Energies. 2015; 8(8):7677-7689. https://doi.org/10.3390/en8087677
Chicago/Turabian StyleHwang, Sun-Han, Chung G. Kang, Yong-Ho Son, and Byung-Jun Jang. 2015. "Software-Based Wireless Power Transfer Platform for Various Power Control Experiments" Energies 8, no. 8: 7677-7689. https://doi.org/10.3390/en8087677