1. Introduction
Three-phase induction motors (TIMs) are widely used in numerous applications, such as in factories, the industrial sector, air compressors, fans, railway tractions, pumps, and so on, accounting for approximately 60% of the total industrial electricity consumption [
1,
2]. A TIM is a dynamic control system that is difficult to represent theoretically; in several applications, the drive systems of TIMs are exposed to sudden changes in speed or mechanical load [
3]. For induction motors, the scalar control (
i.e.,
V/f control) method is one of the control techniques most commonly used by researchers because of the low cost and simple structure and design. Moreover, this method can effectively control medium to high speed, and the parameters of induction motors do no need to be considered [
1,
4]. A voltage source inverter (VSI) is an important part of an electronic device that is used to generate the signals that control voltage and frequency. A VSI depends on the switching control scheme supplied to six insulated-gate bipolar transistors (IGBTs), which are initiated in the inverter, to generate harmonic signals. Various switching control techniques, such as sinusoidal pulse width modulation, space-vector pulse width modulation (SVPWM), carrier-based pulse width modulation, selective harmonic-elimination pulse width modulation and harmonic-band pulse width modulation, have been reported in the literature. SVPWM is utilized to control switching inverters, because it minimizes the switching losses and harmonics of output waveforms [
5,
6].
Numerous types of speed controllers are available for induction motors. One example is the proportional integral derivative (PID) controller, which is widely utilized in industrial applications because of its simple design and structure. The sensitivity and stability of the controller design are determined by the PID parameters, which include proportional, integral and derivational gains [
1]. In [
7], a PID controller was used with an indirect field-oriented controller to regulate TIMs. A PID controller controlled the automatic voltage regulator (AVR) in [
8]. However, suitable parameters are difficult to obtain for a PID controller, because of its mathematical model transfer functions and trial-and-error considerations [
9,
10,
11].
Controllers based on artificial intelligence have been employed in numerous applications. For example, an artificial neural network (ANN) was used to implement and test the fault identification scheme for a TIM in [
12]. An ANN was also employed to estimate the rotor speed in a sensorless vector-controlled induction motor drive in [
13]. Adaptive neuro-fuzzy inference systems (ANFIS) are methods within an ANN with a fuzzy logic controller (FLC). In [
1], ANFIS was used to regulate the speed control of a TIM. It was also used to adapt the control of a sensorless induction motor in [
14]. However, these controllers are hindered by a number of disadvantages, including their huge data requirement, as well as their long learning and training time.
In recent years, techniques that employ FLC have been implemented by numerous researchers in controlling induction motor drives. FLC is easy to implement, and it does not require a mathematical model of the controlled system. FLC has been considered the better alternative compared to other controllers because it can more effectively control speed and mechanical load; as such, FLC exhibits excellent performance in terms of transient reduction and control [
11,
15,
16,
17]. FLC is used to select the appropriate timing of intervention for each distribution strategy [
15]. In [
9], the FLC functioned as the indirect field-oriented controller of a double-star induction machine. An FLC and a sensorless controller were used as vector controllers of an induction motor in [
17]. In [
18], an FLC and a PI controller were used to create a new control strategy for pitch angle control to improve the power quality and transient stability of a squirrel-cage induction generator. In [
10,
11,
19,
20], a PID controller was self-tuned with an FLC to improve its control of an induction motor. However, the process depends on the inputs and outputs of membership functions (MFs), which pertain to the number of rules and rule bases. These variables are determined by a trial-and-error procedure, which is time consuming [
11,
16].
Recently, optimization techniques have been employed to design the speed controller of an induction motor. Optimization techniques include the genetic algorithm (GA) and particle swarm optimization (PSO), among others. In [
1,
21], GA was used to select PID coefficients to control the speed of an induction motor. PSO improved the PID controller of an AVR in [
8]. In [
16], a differential search algorithm was used in FLC design optimization techniques to develop an FLC for photovoltaic inverters. In [
22], an optimal FLC-based maximum power point tracking algorithm for photovoltaic systems is presented to improve FLC with the use of the PSO algorithm. In [
23], a GA was used to enhance the fuzzy-phase plane controller for the optimal position/speed tracking control of an induction motor. The GA–PSO algorithm was applied to improve indirect vector control to find the optimal torque control [
24]. In [
25], PSO was utilized as a model-parameter identification method for permanent magnet synchronous motors.
At present, numerous researchers have shown interest in developing the performance of optimization methods. One of these methods is a quantum system applied to PSO by Sun
et al. [
26] in 2004. Quantum PSO (QPSO) has been used in several applications, such as in [
27,
28], because of its powerful performance. In [
29,
30], QPSO was improved by applying a Gaussian probability distribution; the improved QPSO was used in an economic load dispatch of a power system [
31]. In [
32], QPSO was used to optimize core fuel management in water-water energy reactor (WWER)-1000. The quantum system was applied to optimize the gravitational search algorithm (GSA) in [
33]. In [
34], quantum GSA was employed to solve the optimal power-quality monitor-placement problem in power systems. Meanwhile, it was used to solve the thermal-unit commitment problem with wind power integration in [
35]. In addition, this algorithm was adopted to address another problem with wind power integration in [
36]. In [
37], quantum GSA was used to improve classification accuracy with an appropriate feature subset in binary problems. Binary-encoded problems were solved through GSA optimization with quantum computing in [
38]. The firefly algorithm was improved using the quantum system. The quantum firefly algorithm was applied to optimize the power-quality monitor placement in a power system in [
39]. In [
40], the quantum firefly algorithm was used to improve the power quality and reliability of distribution systems.
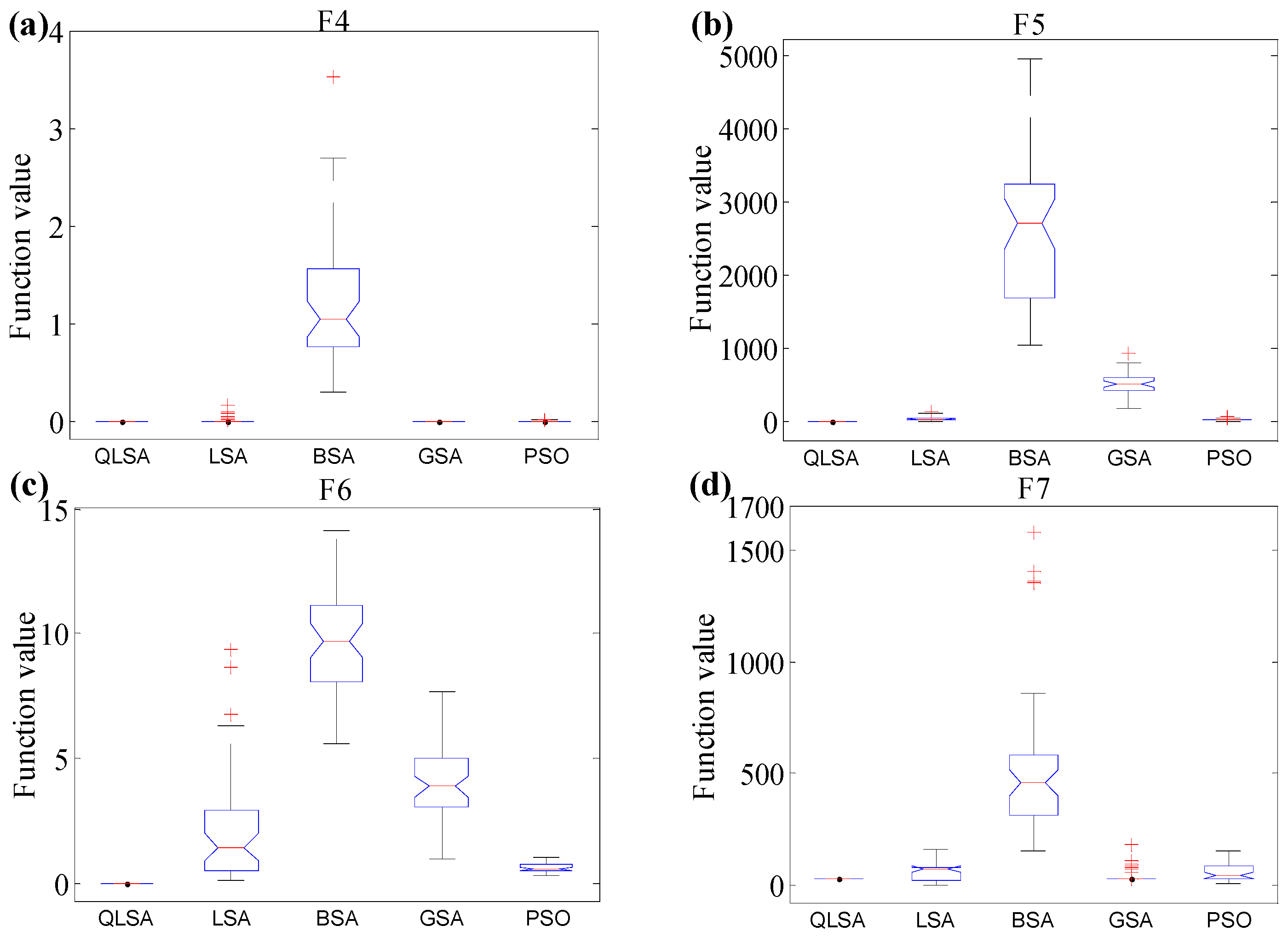
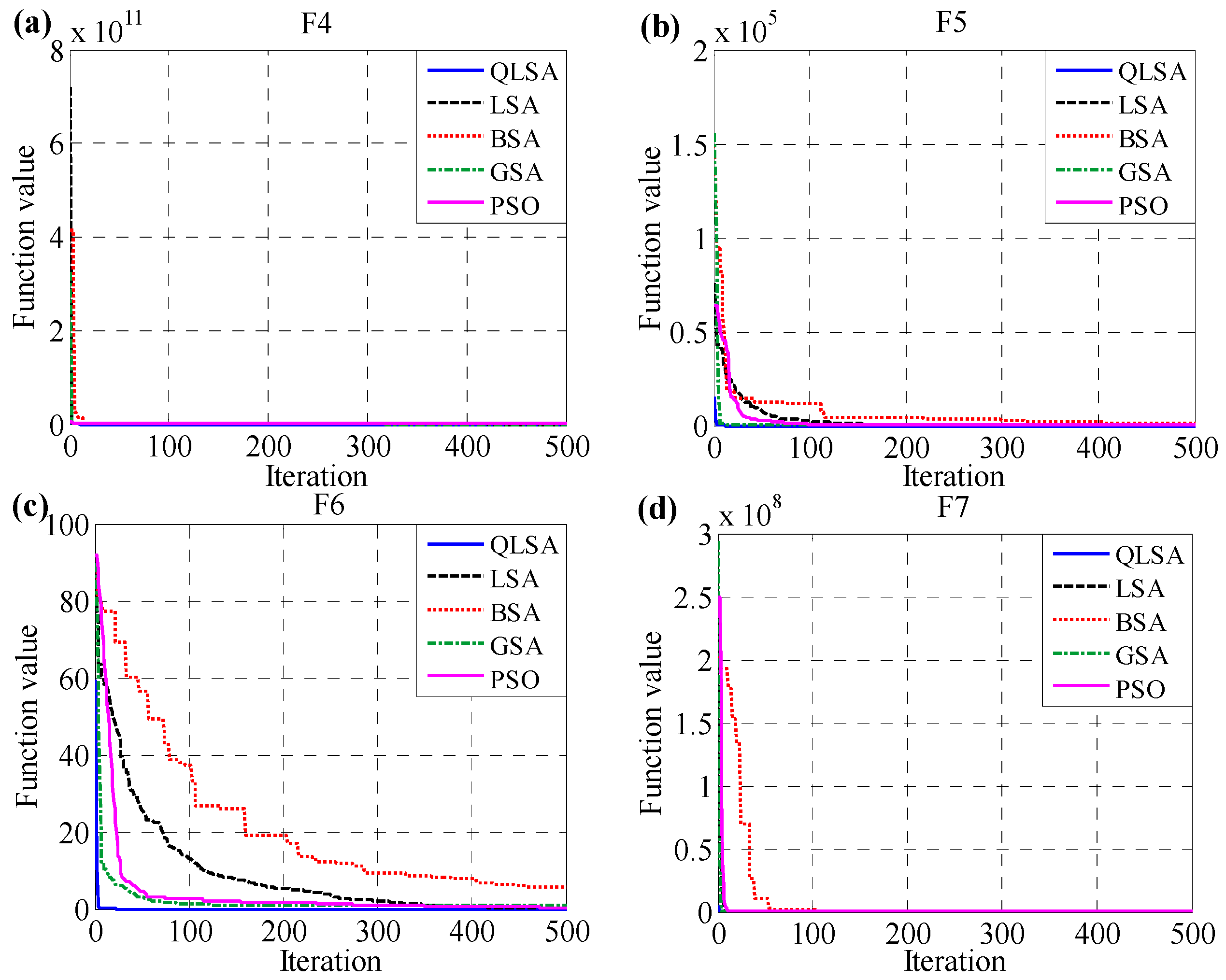
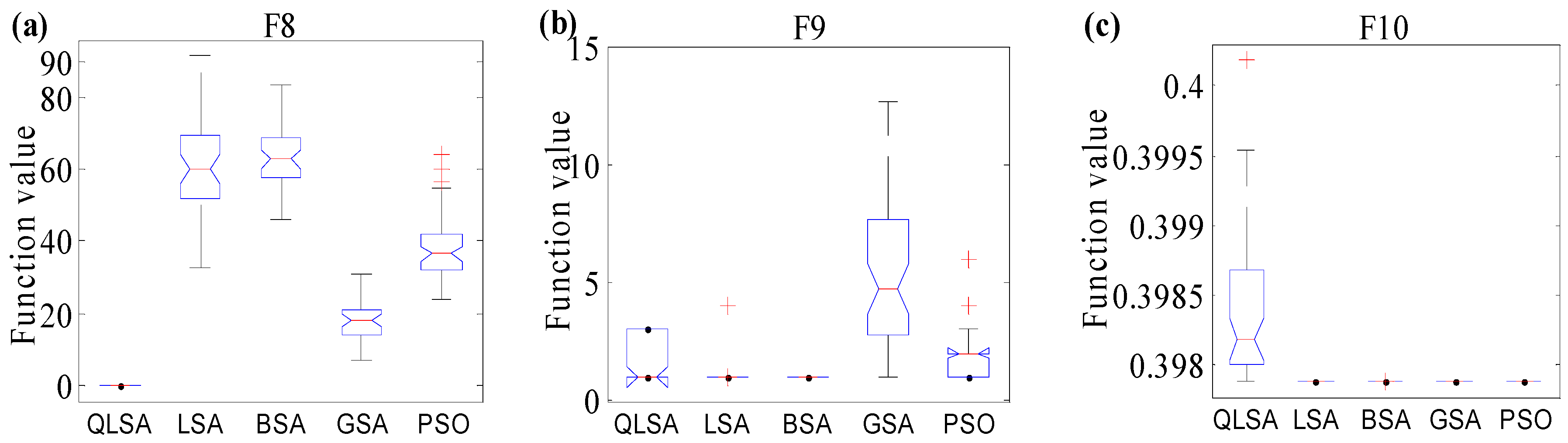
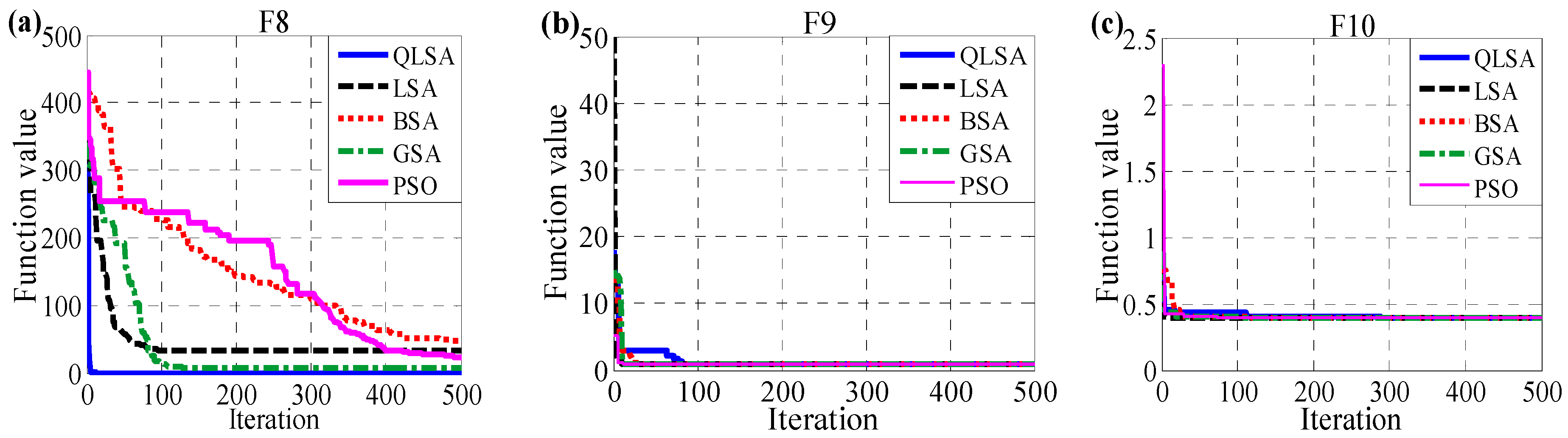
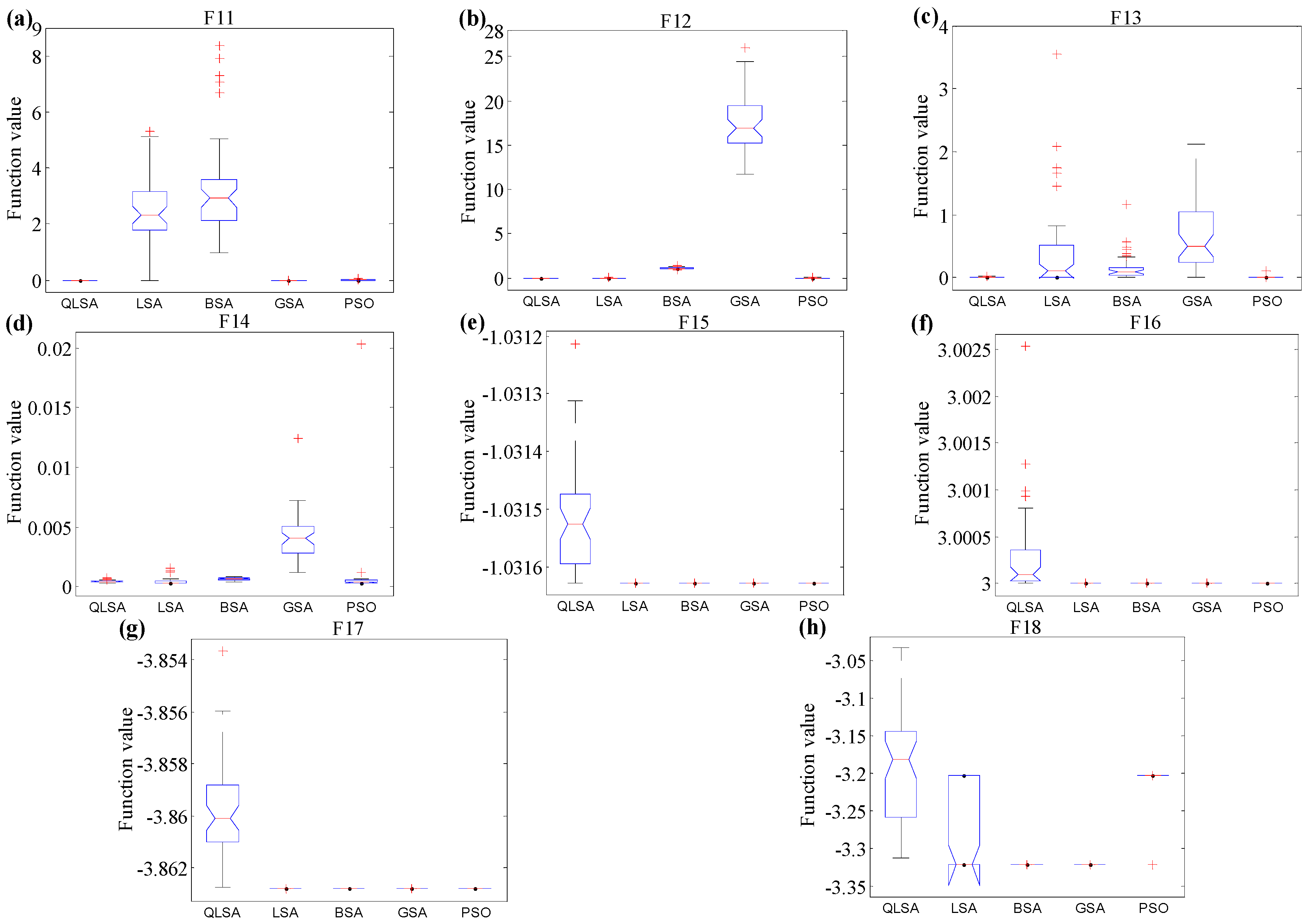
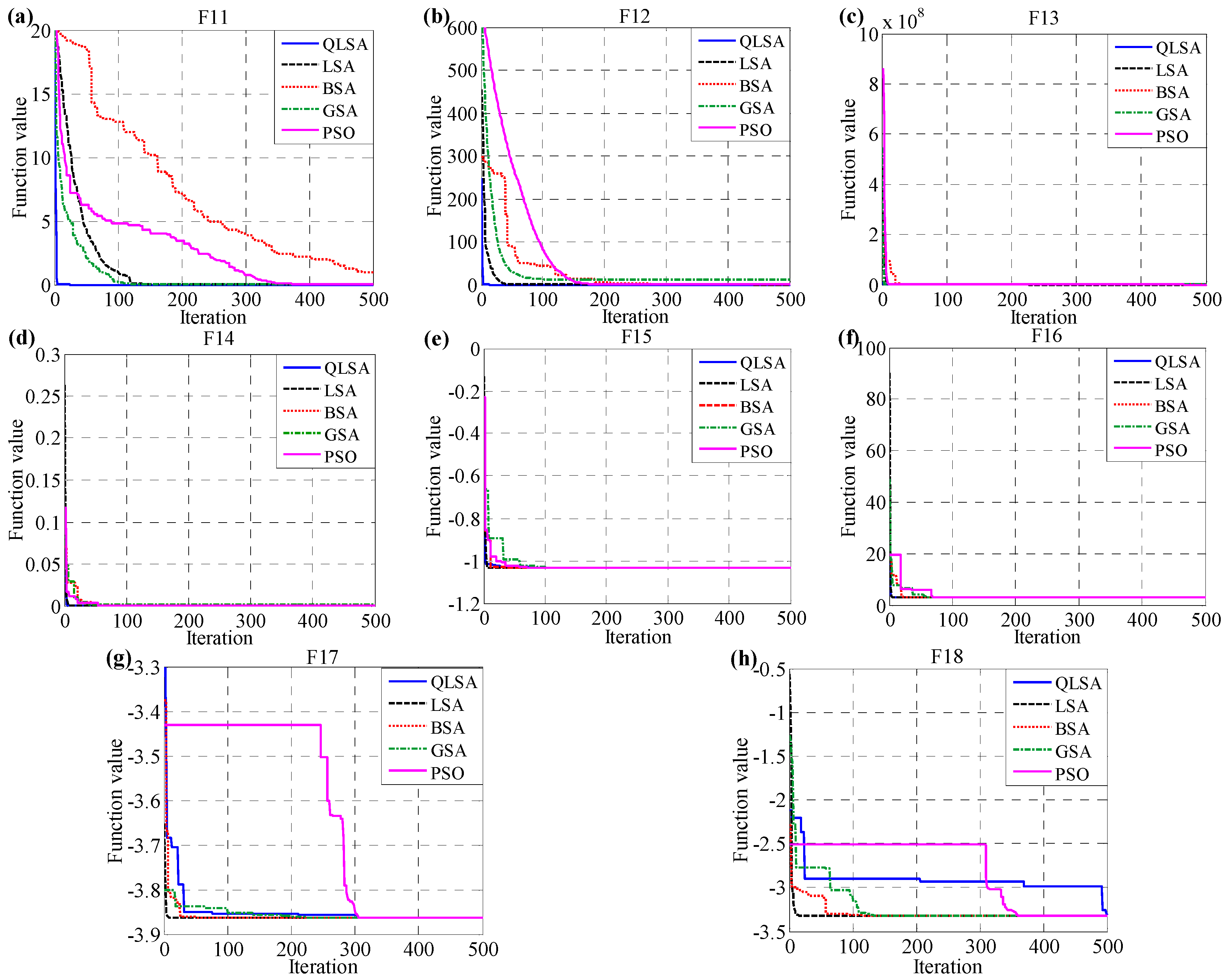
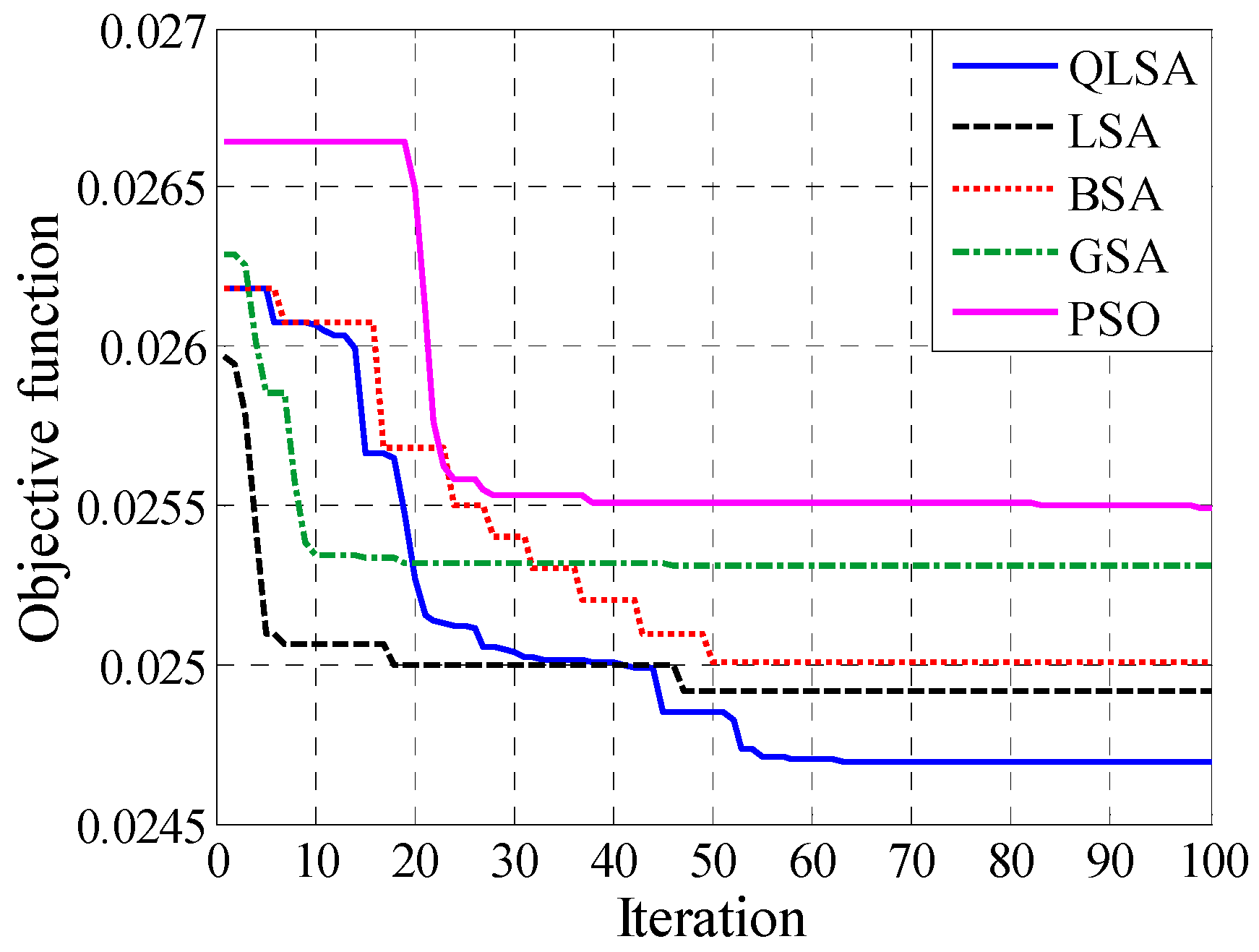
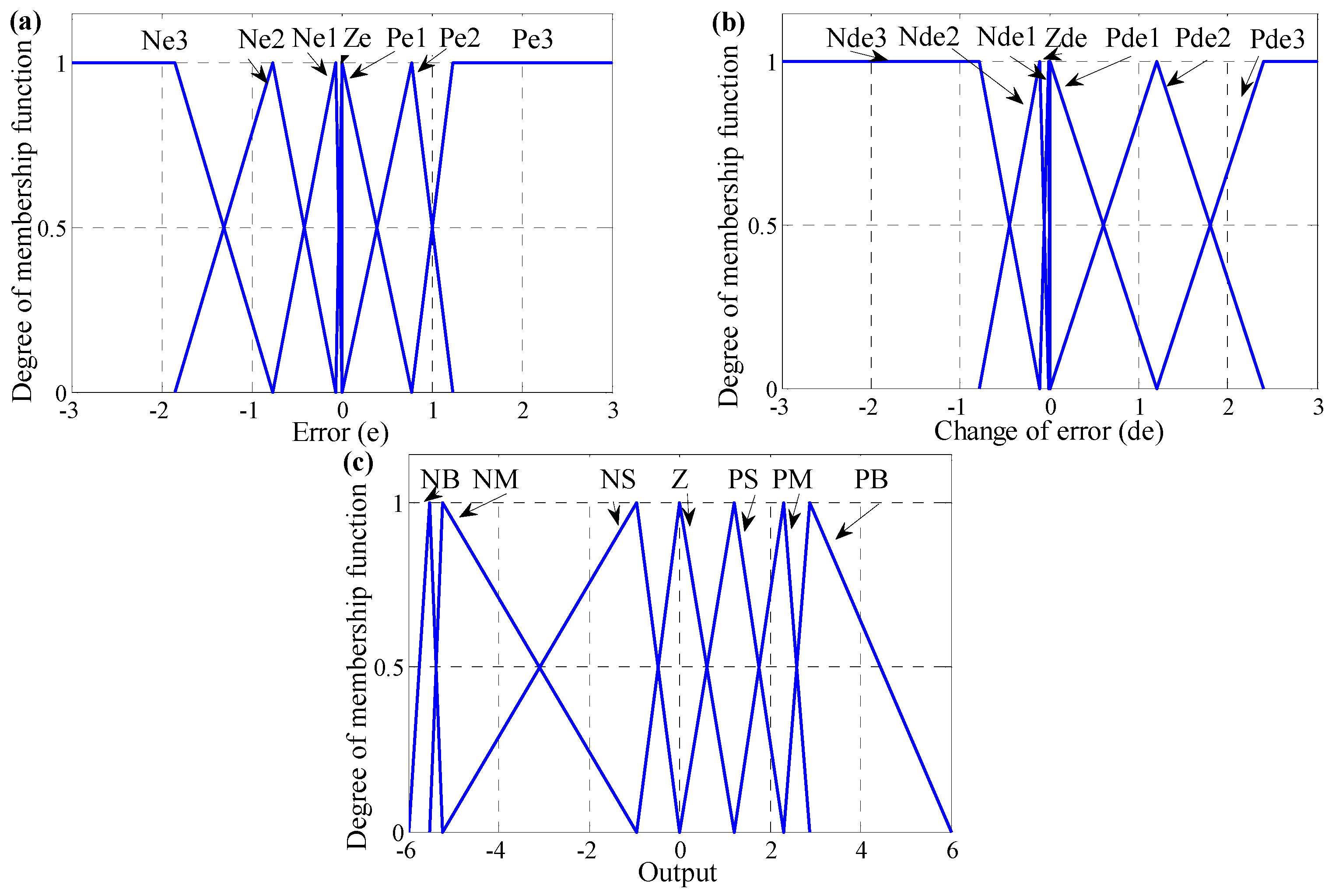
In the present study, a novel optimization method called the quantum-behaved lightning search algorithm (QLSA), is generated to solve constrained optimization problems. This method applies quantum mechanics theories with LSA to enhance the performance of LSA. This work is divided into two experiments. The first experiment comprises an application of 18 benchmark functions and a comparison with four optimization methods, namely the LSA, the backtracking search algorithm (BSA), GSA and PSO, to evaluate the reliability and efficiency of the proposed algorithm. The second experiment is developed to improve the performance of the TIM speed controller by tuning the free parameters and selecting the limits and best values for the input and output of the MFs. The results obtained from the developed QLSA-based FLC (QLSAF) have been compared to the results obtained by other controllers based on LSA, BSA, GSA, PSO and PID under sudden changes in speed and mechanical load. In addition, a high performance of MFs is achieved by minimizing the error function through the use of the mean absolute error (MAE) of the system. Moreover, SVPWM is employed with QLSAF for TIM drives.
2. Quantum-Behaved Lightning Search Algorithm (QLSA)
Numerous optimization methods are available for developing and improving system performance. These methods include GA, simulated annealing, the ant colony search algorithm, PSO, GSA, and so on. In general, optimization techniques are used to solve complex numerical optimization problems, as well as non-linear and non-differentiable systems. In recent years, researchers have focused on developing new optimization techniques that have a significant and powerful role in research development. One of the modern optimization methods is LSA, which was proposed by Shareef
et al. [
41] in 2015. The mechanism of this method consists of three steps: projectile and step leader propagation, projectile properties and projectile modeling and movement, as explained in [
41]. This study is performed based on enhanced LSA using quantum mechanics.
The concept of QLSA involves developing the original LSA by searching for a new position for the population to obtain the best position for step leaders. At the beginning, QLSA is conducted to build memory according to the mean of the best positions of the step leaders, which are called global step leaders
. Global step leaders represent the best step leaders that can obtain the minimum value of the evaluation. QLSA achieves the attraction and convergence of each step leader with a global minimum and searches for the best position by relying on the stochastic attractor of step leaders
as represented in the following novel created equation:
for
,
and
, where
,
and
are the population size, the problem dimension and the maximum number of iteration, respectively;
a,
b and
c are three uniformly-distributed random numbers in the range (0,1) for the
j-th dimension of step leaders
;
is the best step leader for each population;
is the global step leader for each population; and
is the scale factor, which is suggested to be set between four and 20. This study uses the valu
.
Suppose that LSA is a quantum system and that each step leader exhibits the quantum behavior with its quantum state formulated by a wave function
.
is the probability density function, which depends on the potential field where the step leader lies. Each individual step leader moves in the search space with a potential on each dimension, of which its center is between points
and
. LSA has been considered a step leader in 1D space; a Schrodinger equation solves the time dependency of the 1D potential with point
as the center of potentia
. The wave function, at iteration
, is represented by the following equation [
29,
30,
32]:
where
is the standard deviation of the double exponential distribution, varying with iteration number
. Thus, the probability density function
is a double exponential distribution as follows:
In turn, the probability distribution function
is:
By using the Monte Carlo method, the
j-th component of position
at iteration
can be obtained as follows:
where
is a random number uniformly distributed between (0,1). The standard deviation
of each step leader is calculated through the equation below:
where
, called the mean best position for step leaders, is defined as the mean value of the
positions of all step leaders.
is shown in the equation below:
The contraction expansion coefficient
works on the tuned contractions to control the convergence speed of the algorithms. The coefficient is calculated as follows:
where
represents the initial values of the contraction expansion
implies the final values of the contraction expansion,
t is the current iteration number and
T is the maximum number of iterations. Setting
to be larger than 0.8 and smaller than 1.2 is recommended, and
should be smaller than 0.6 to generate the acceptable algorithmic performance [
29].
is the personal best position of step leader
. Therefore, the position of the step leaders is updated based on the following equation:
QLSA has several distinctive properties when compared to the original LSA. First, QLSA explores new positions using an exponential distribution obtained through the global convergence between step leaders; second, QLSA calculates the mean best position to enhance the original LSA; moreover, each step leader in QLSA cannot approach the global best position without regarding other step leaders. The distance between step leaders and
directs the new position distribution for each iteration, as shown in Equation (9). Suppose the global best position for a step leader is far from the other step leaders; the
may be pulled toward the global best position.
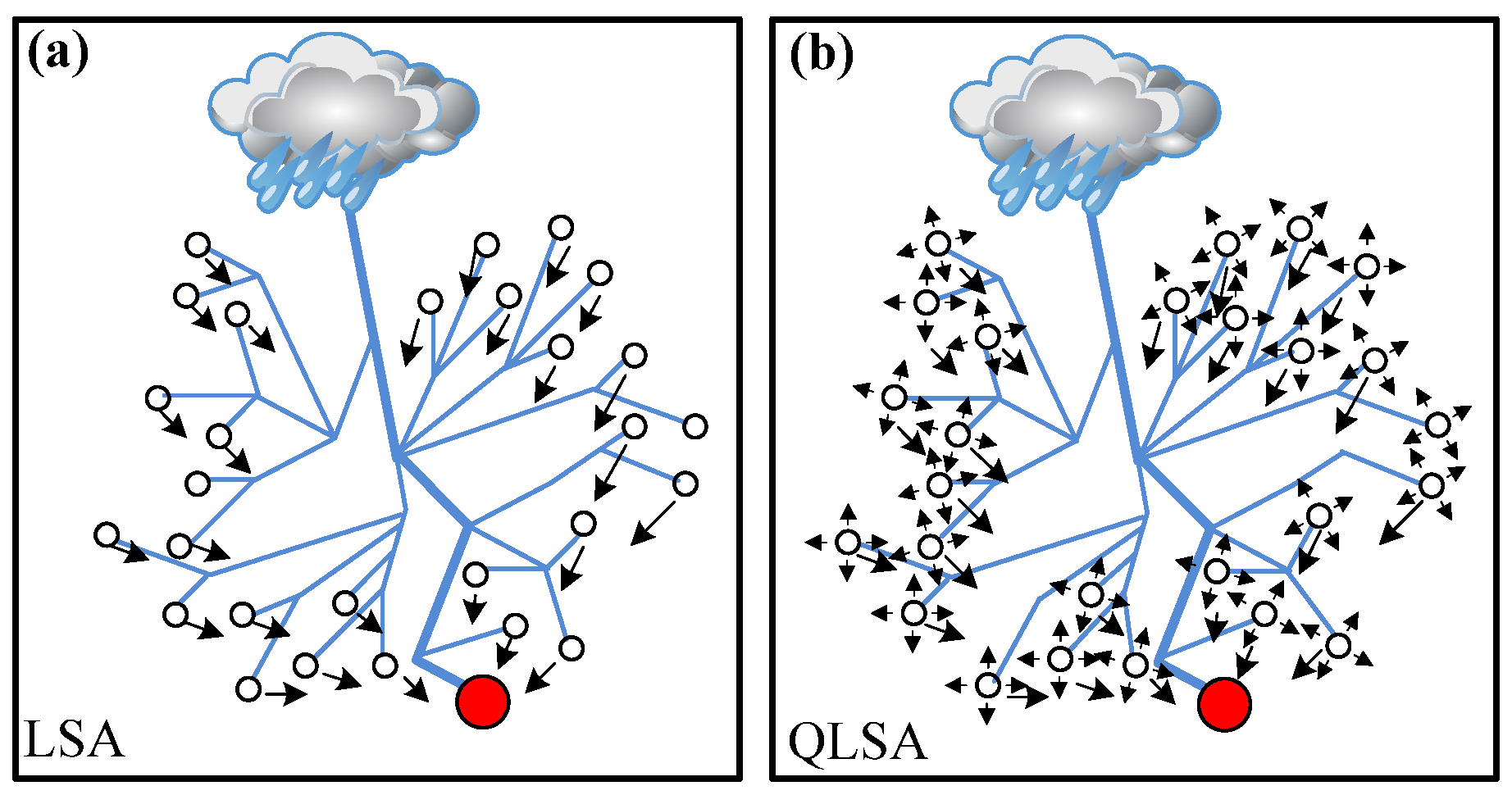
Figure 1 illustrates the spread and relationship between step leaders in the optimization method. The red circle represents the global position for a step leader. The white circles are the other step leaders. The arrows around the small white circles represent the possible directions of the step leaders. In the original LSA, each step leader focuses on the global best position and goes directly to it. The step leaders do not wait or search in space to obtain the new global best position, as presented in
Figure 1a. By contrast, in QLSA, the step leaders around the global best position may move in any direction to obtain the best new position, as illustrated in
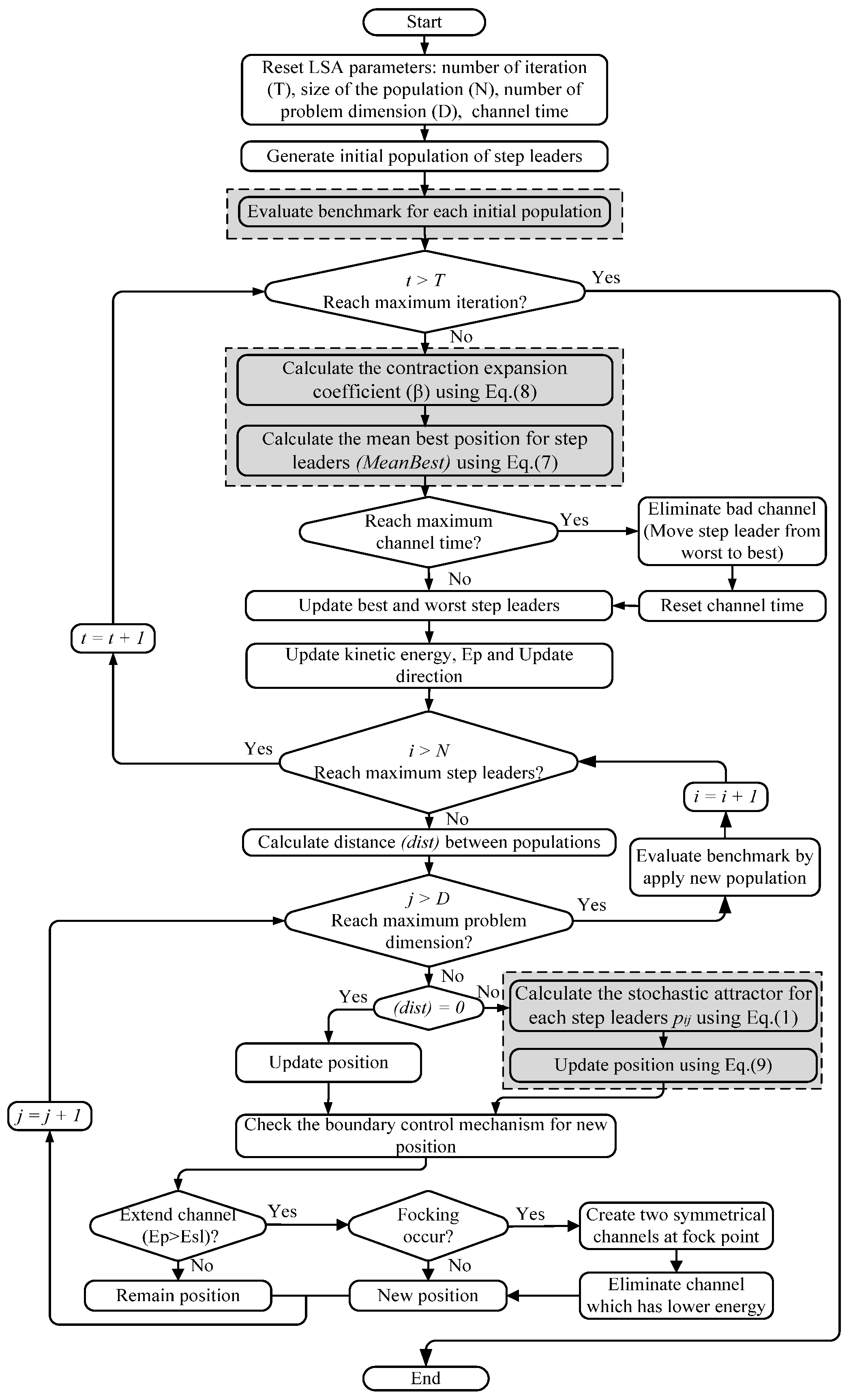
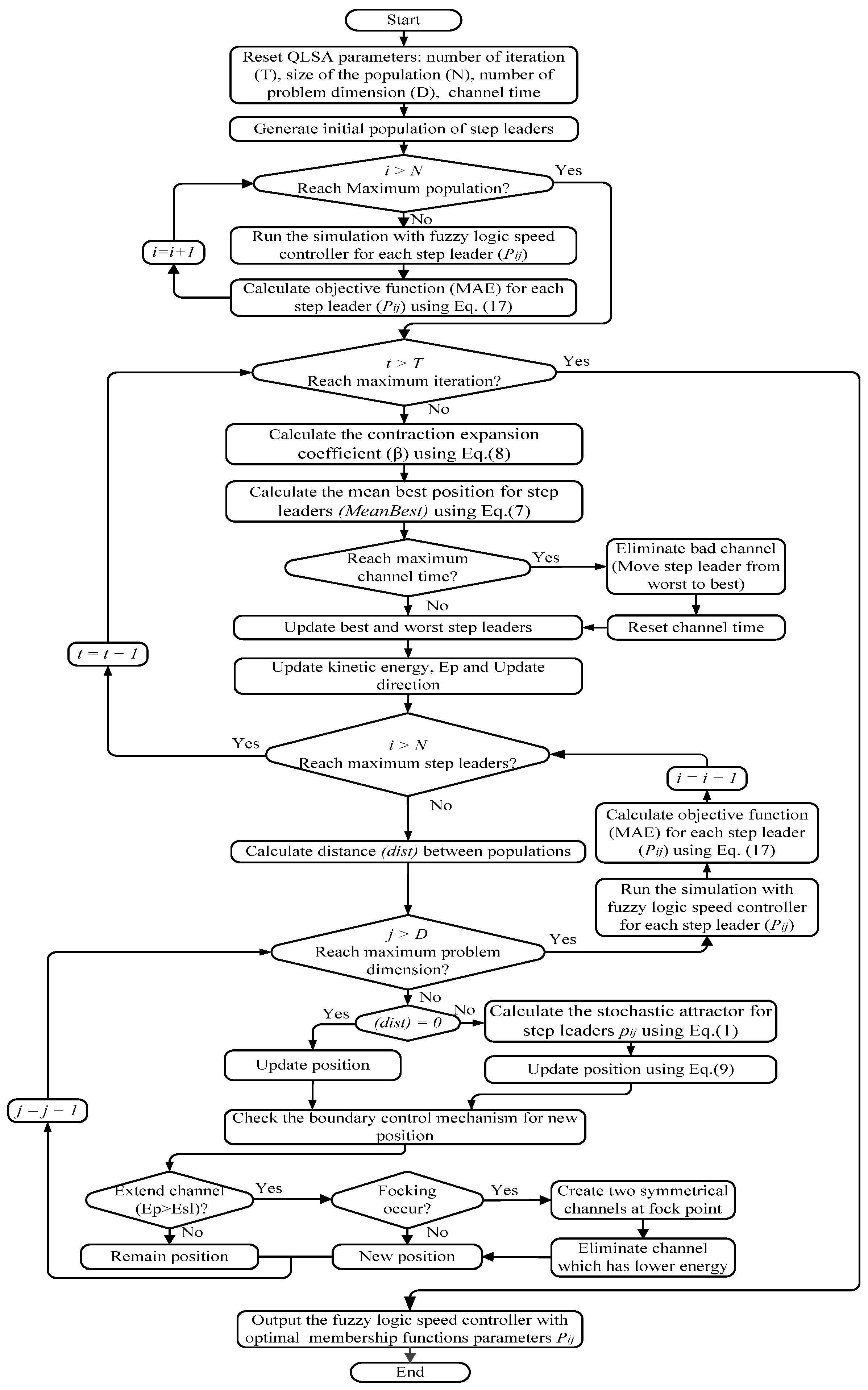
Figure 1b. The implementation of QLSA is demonstrated in the flow diagram in
Figure 2.
Figure 1.
Movements of step leaders in (a) the lightning search algorithm (LSA) and (b) the quantum-behaved LSA (QLSA).
Figure 1.
Movements of step leaders in (a) the lightning search algorithm (LSA) and (b) the quantum-behaved LSA (QLSA).
Figure 2.
Flow diagram of the proposed QLSA algorithm.
Figure 2.
Flow diagram of the proposed QLSA algorithm.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















