Limitations of Viscoelastic Constitutive Models for Carbon-Black Reinforced Rubber in Medium Dynamic Strains and Medium Strain Rates


Abstract
:
1. Introduction
2. Experimental Methods
2.1. Sample Preparation
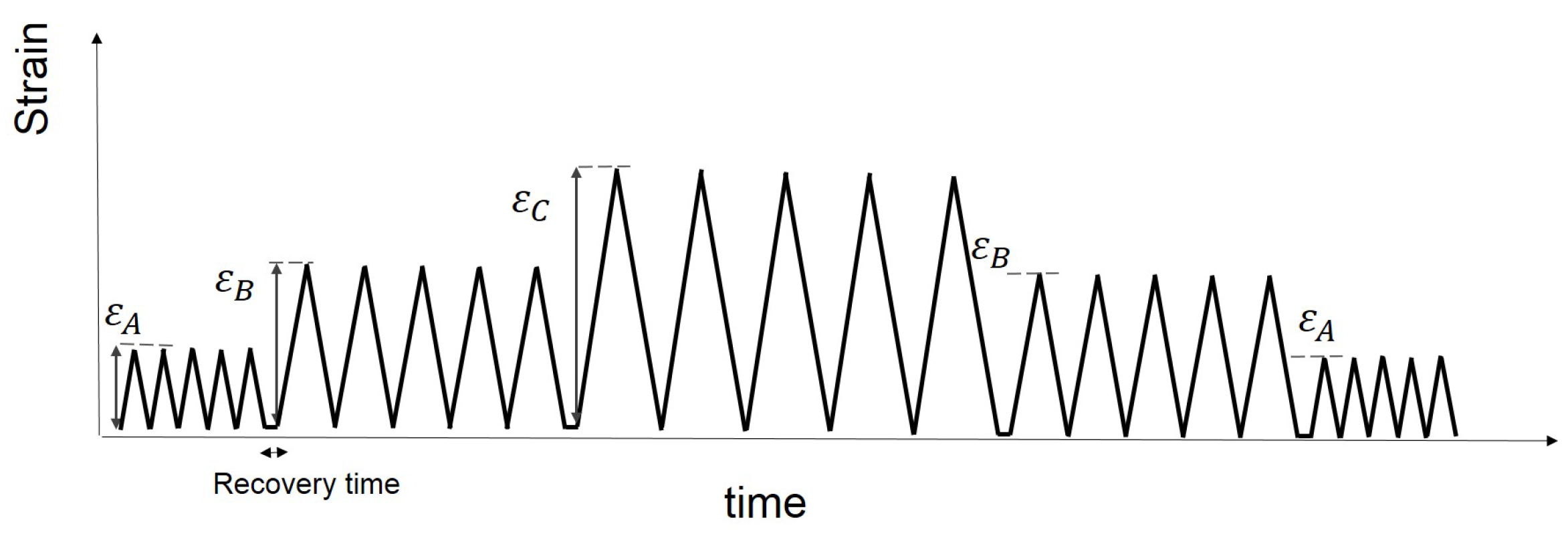
2.2. Measurement Procedure
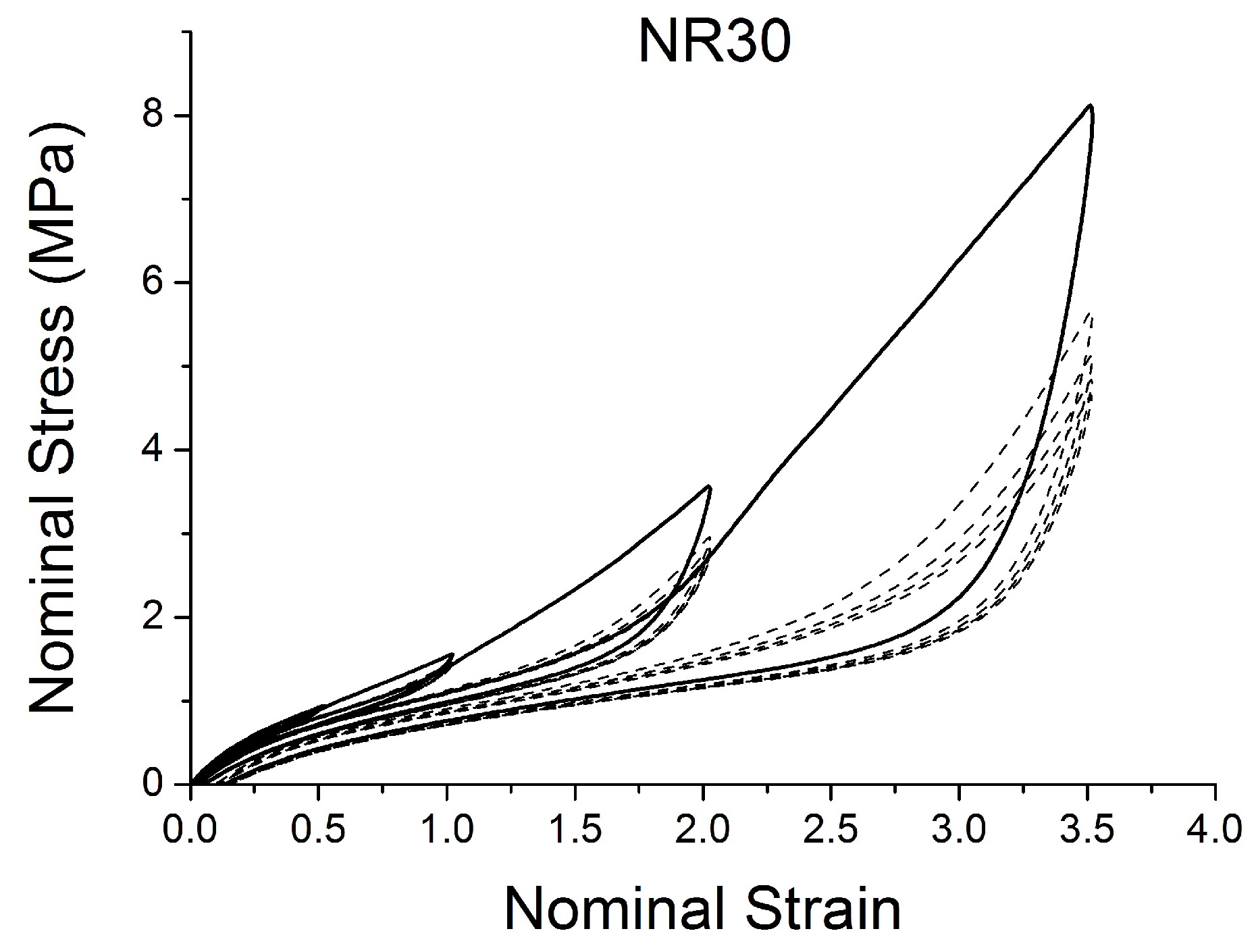
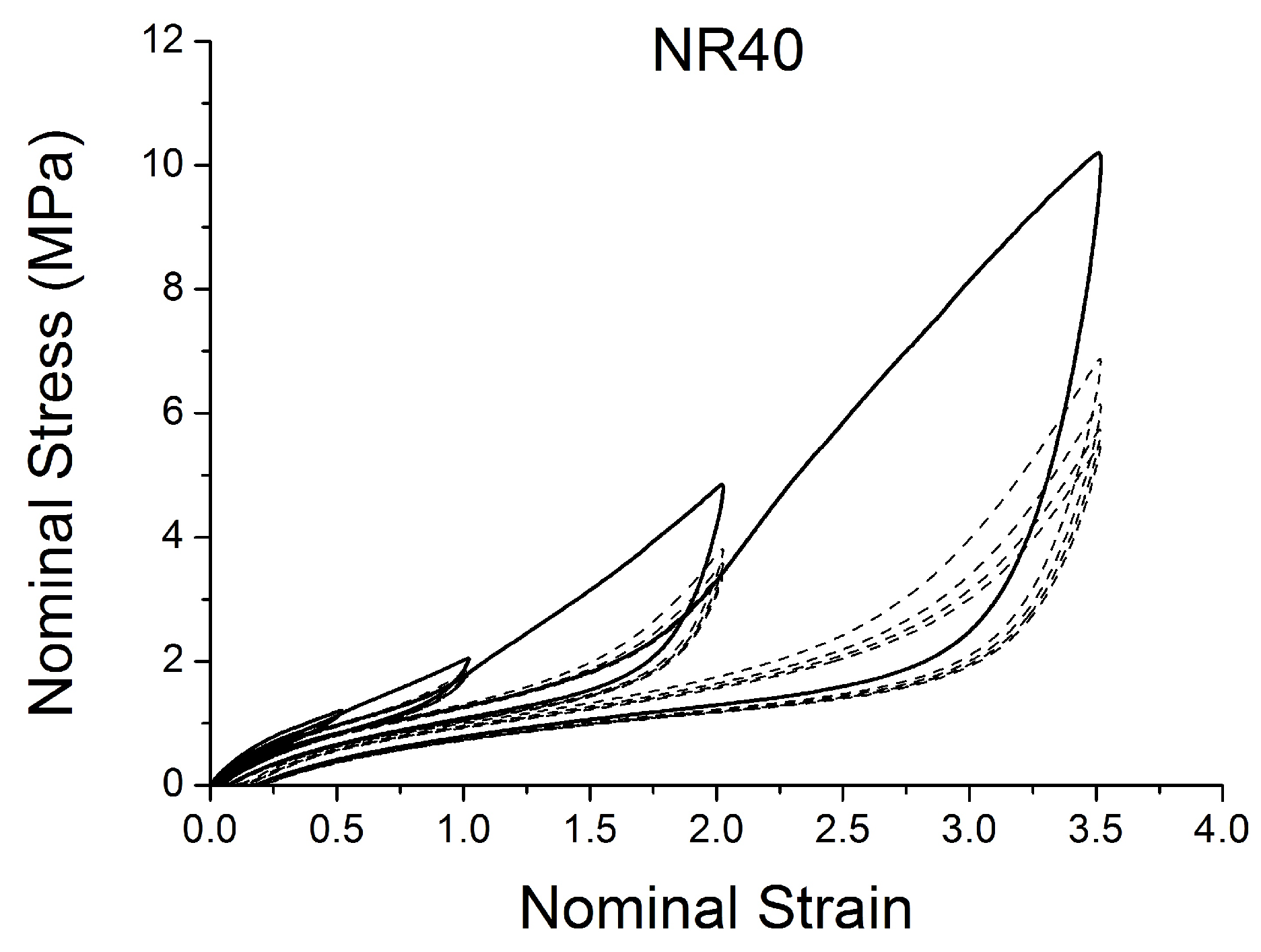
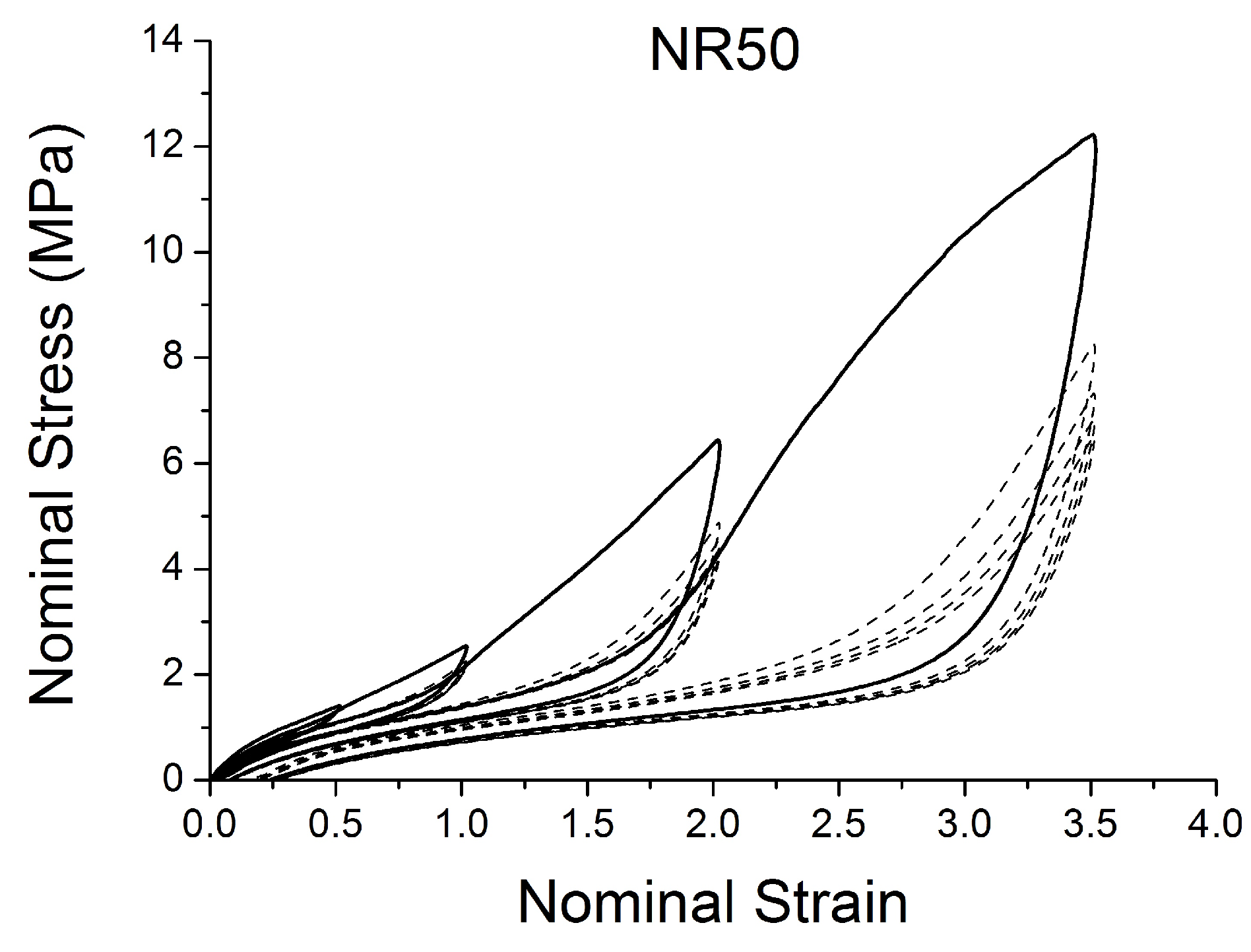
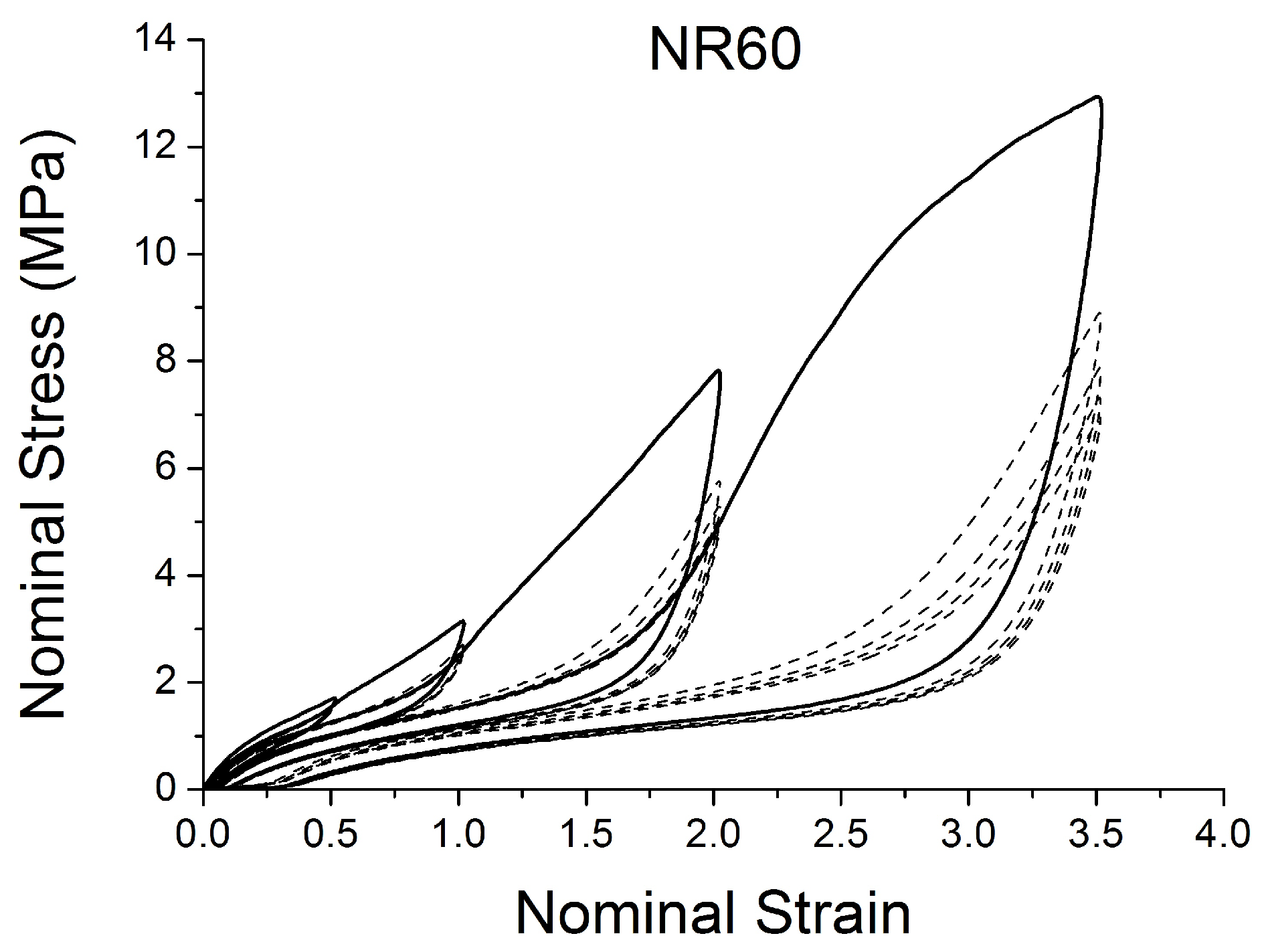
2.3. Experimental Observations
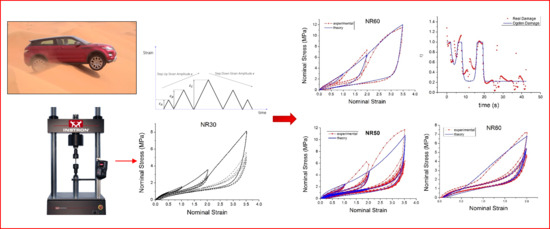
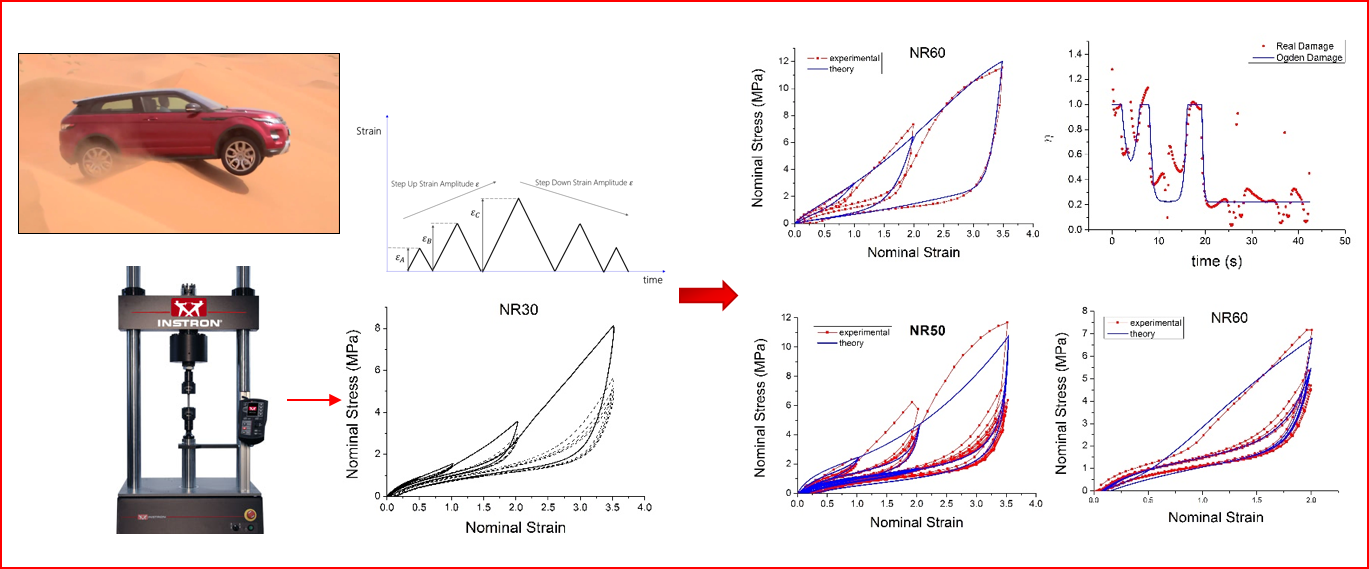
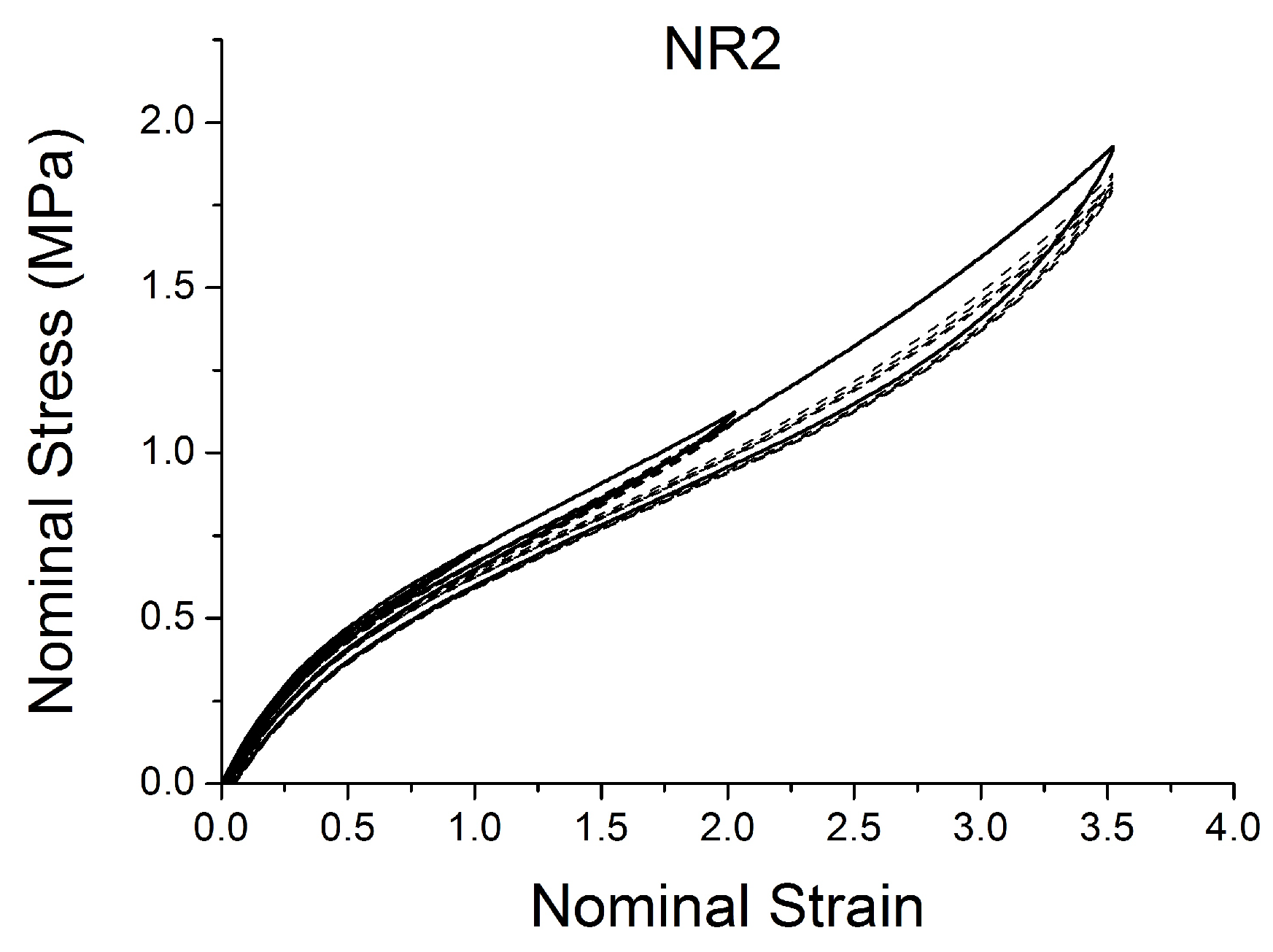
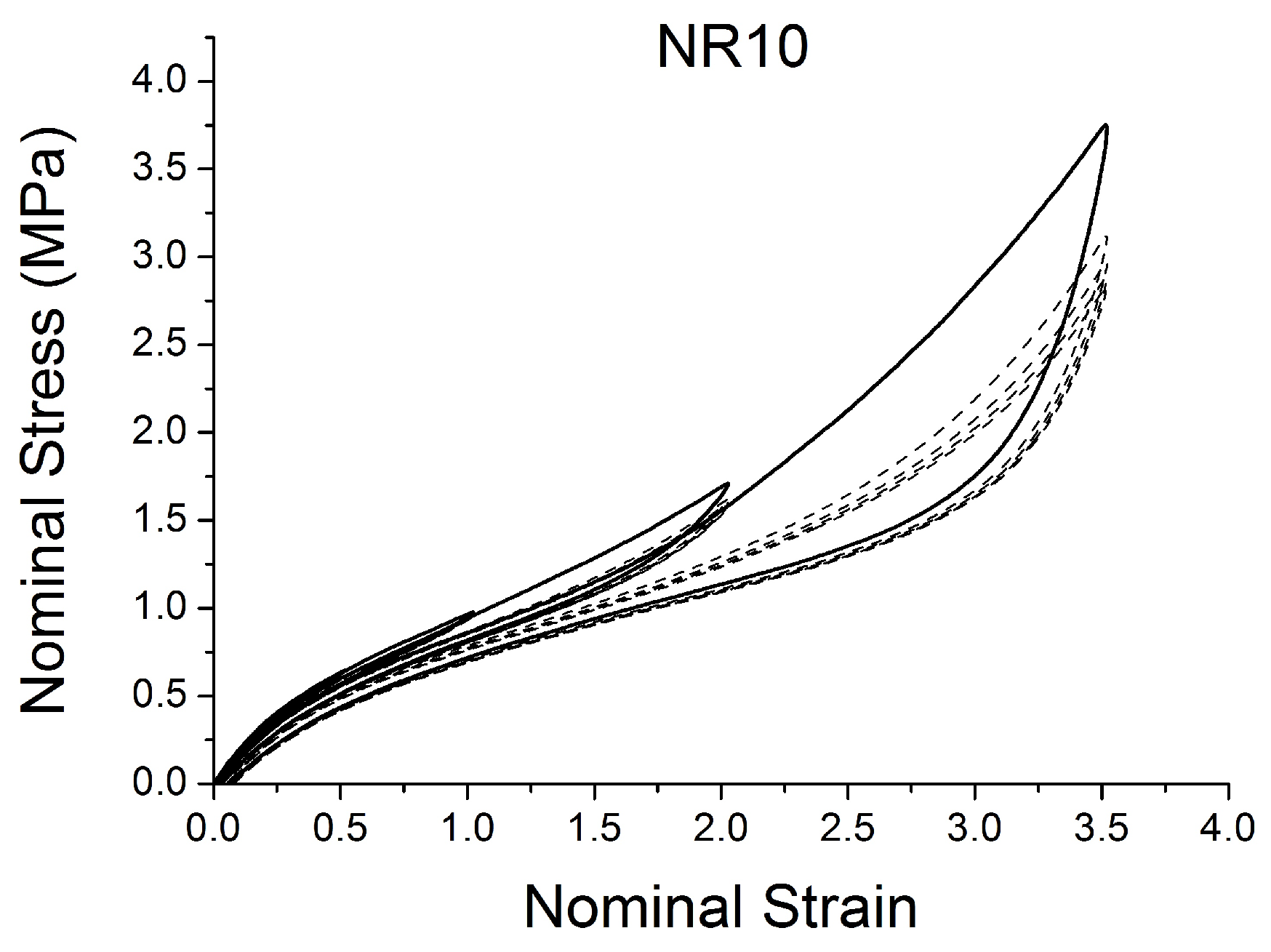
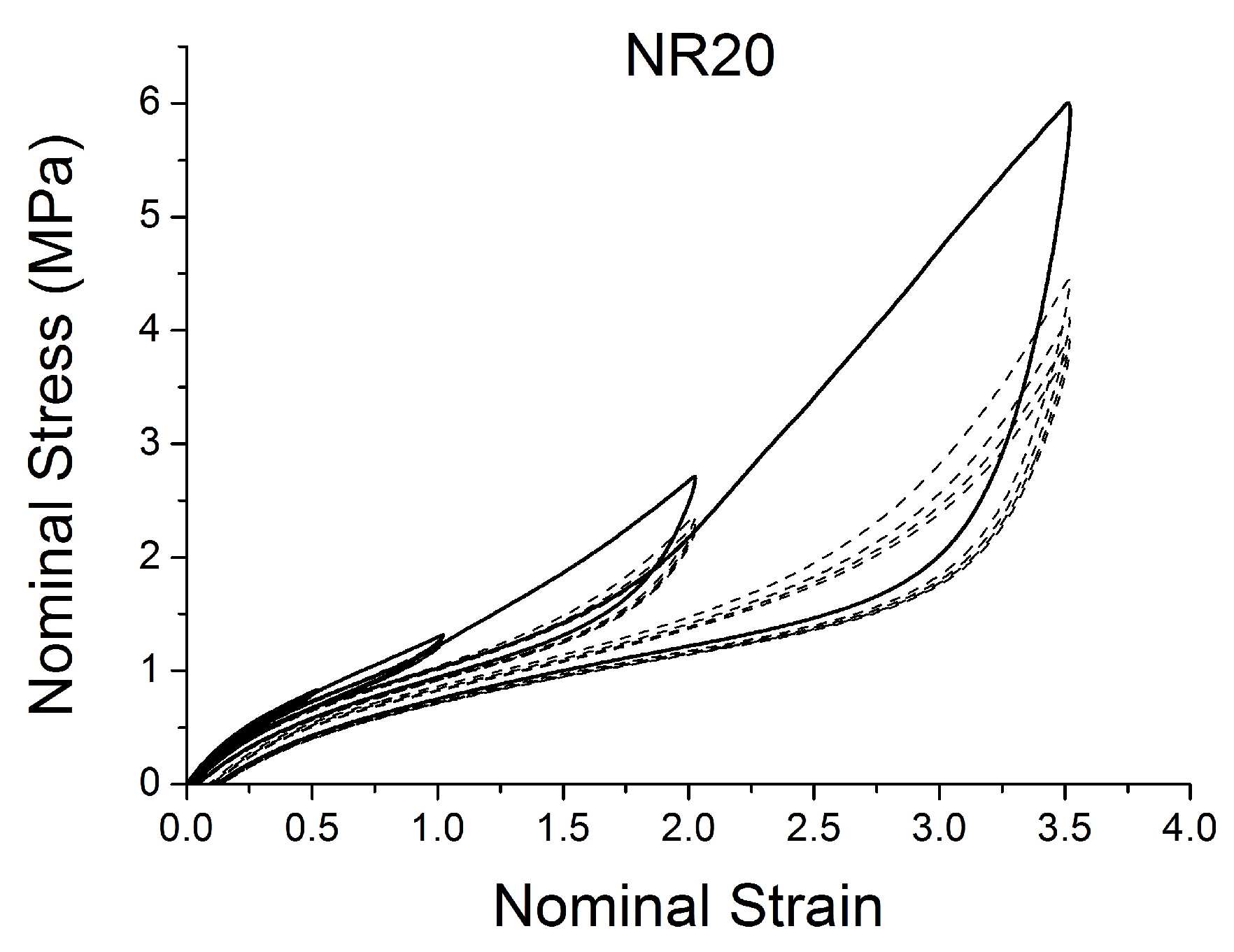
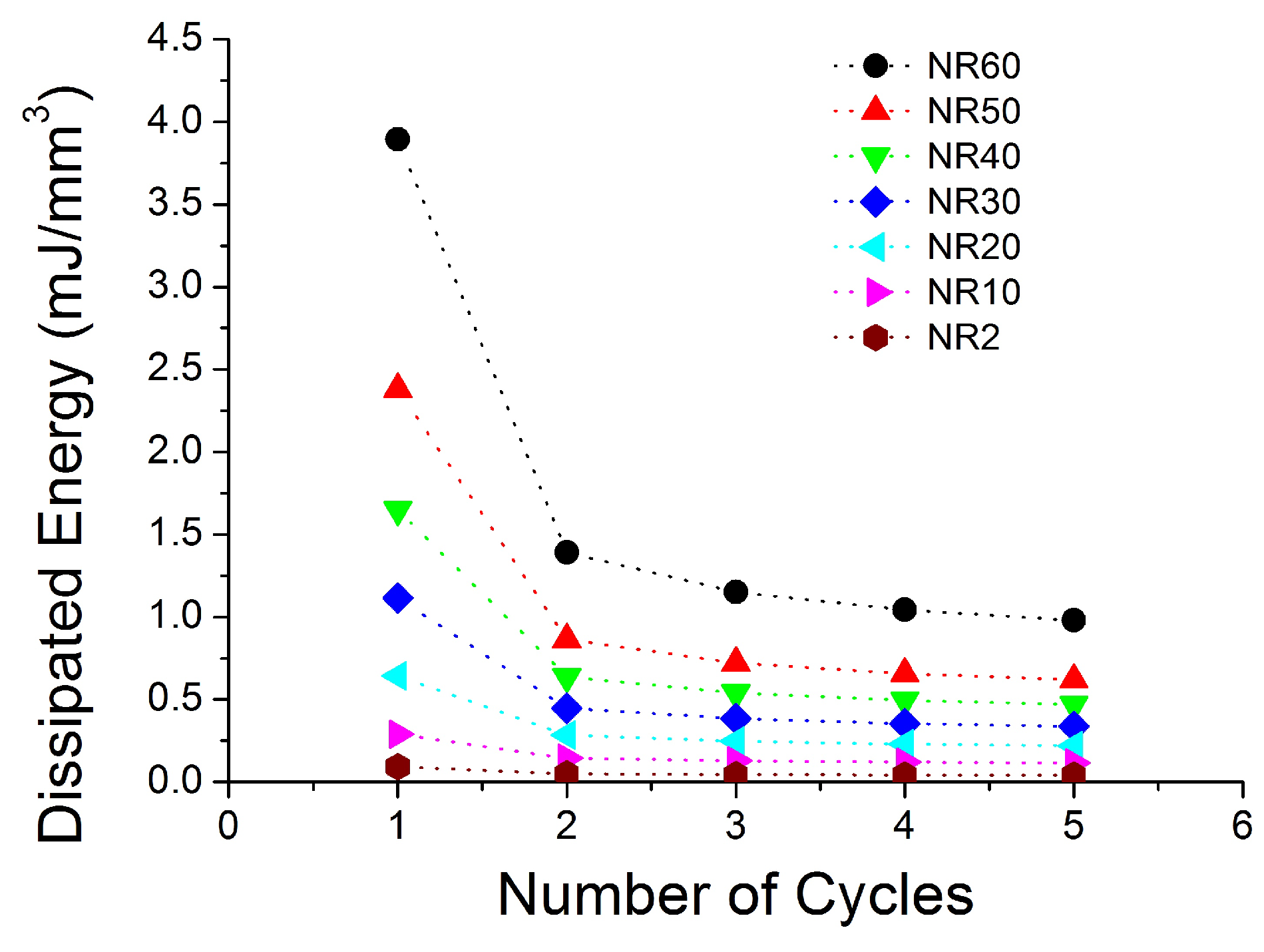
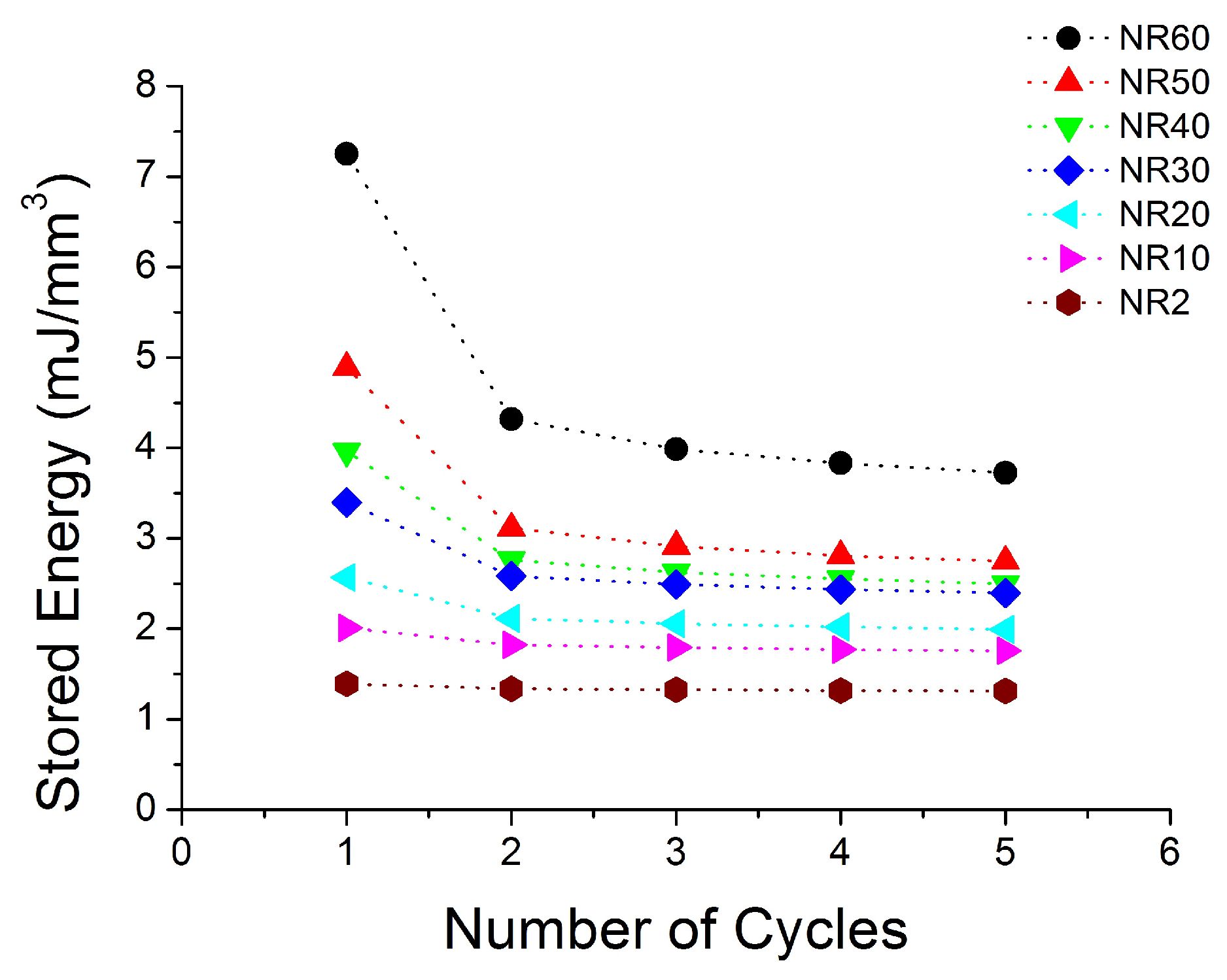
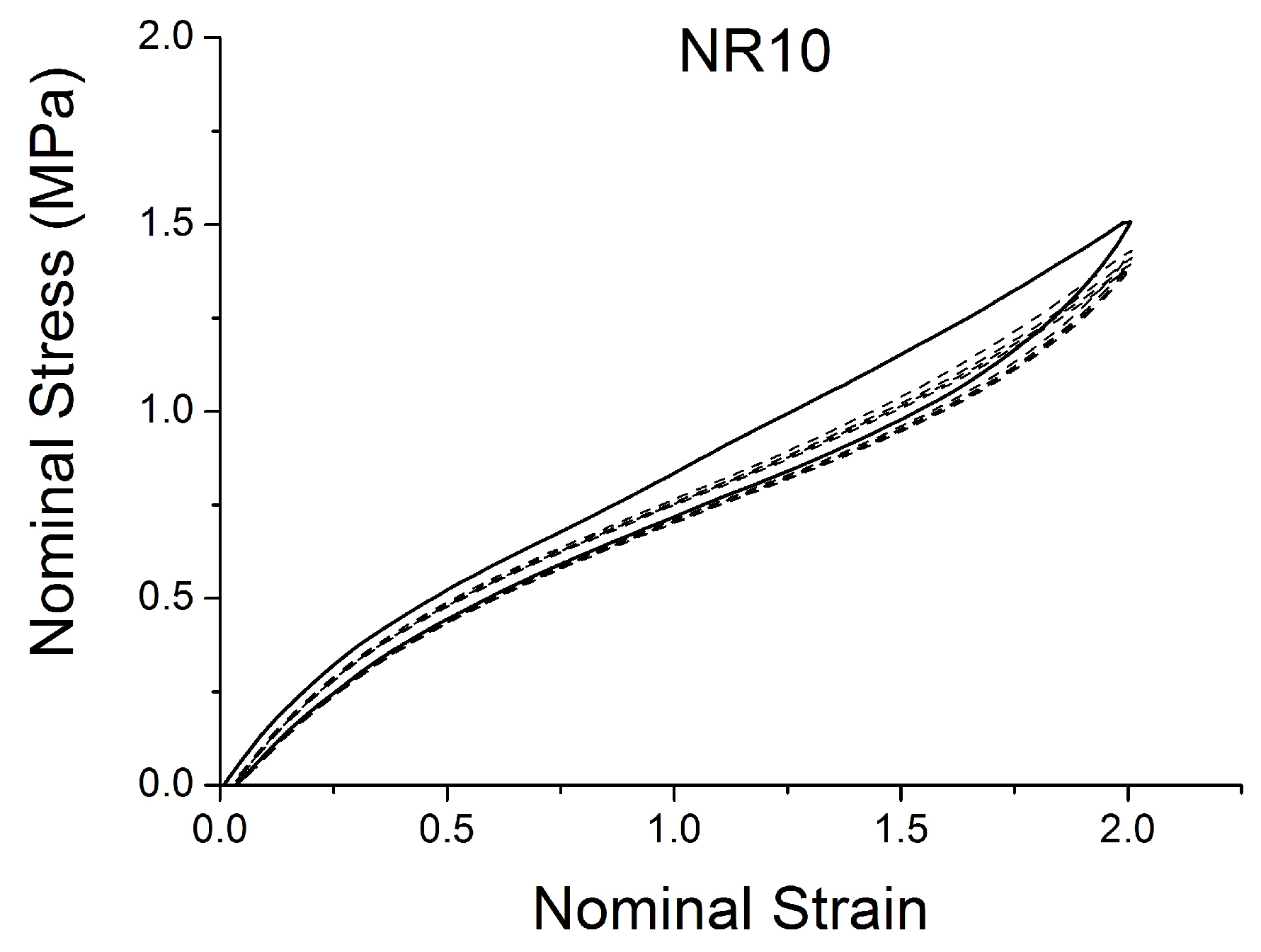
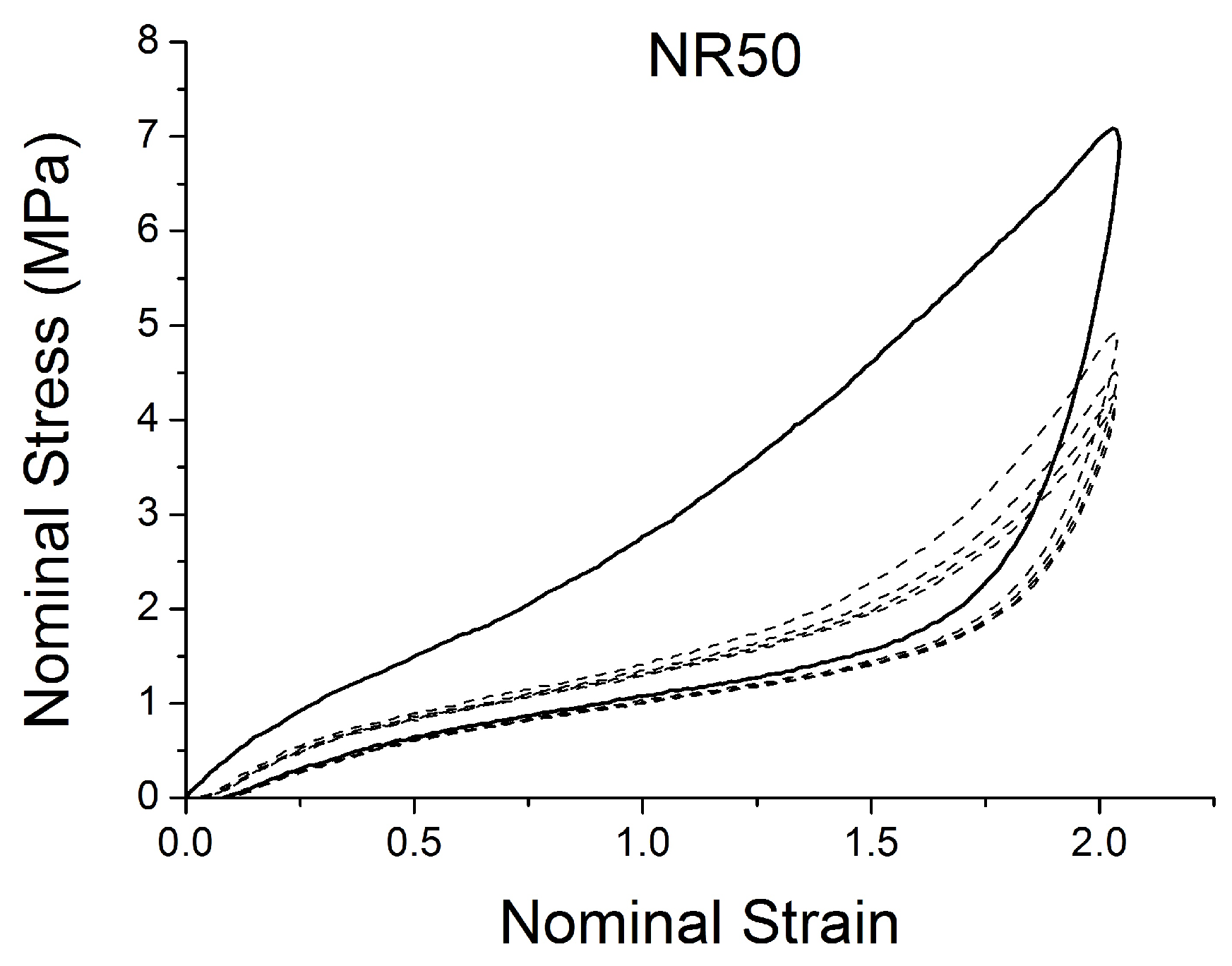
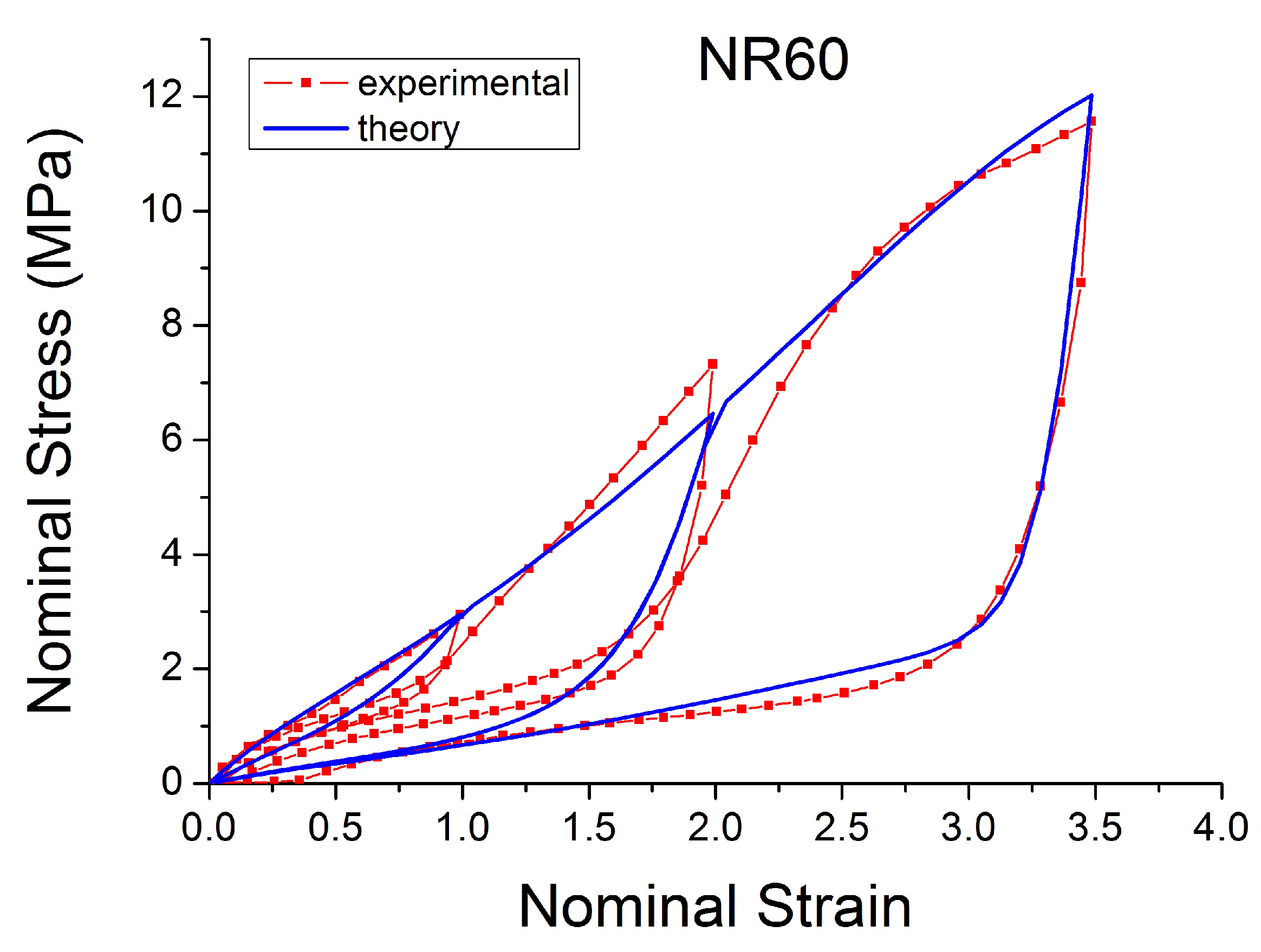
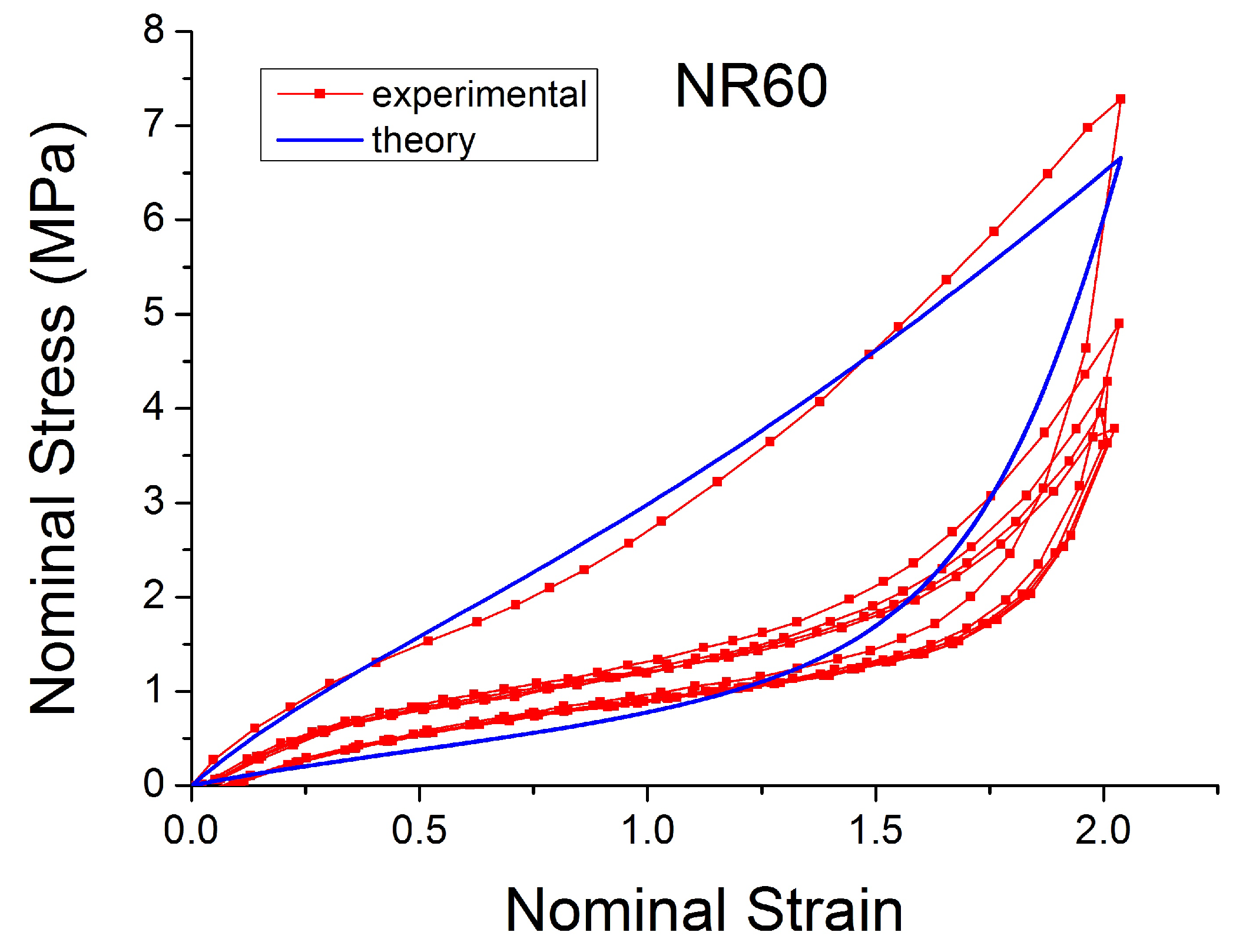
- There is a reduction in the stress on each successive loading at the same strain amplitude. The reduction is largest between the first and second loading-unloading cycles and becomes less significant in the following cycles (Figure 12). The effects of stress softening are less significant for compounds with lower CB content.
- There are residual strains, known as the permanent set, that increase with the amount of carbon black and that depend on the maximum applied strain.
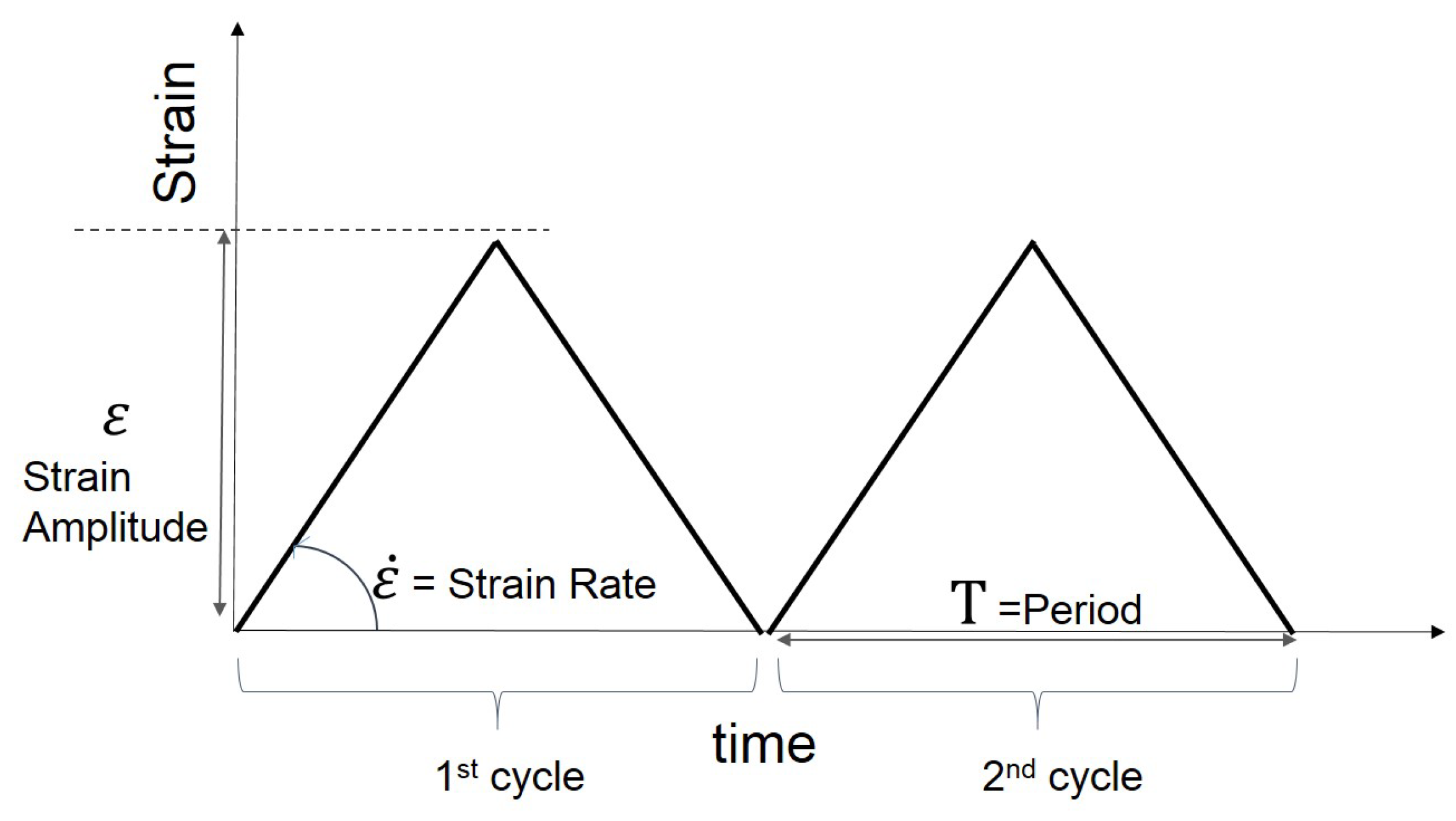
- The behaviour of rubber is rate dependent, with an enhancement of stress when the deformation rate is increased (Figure 13).
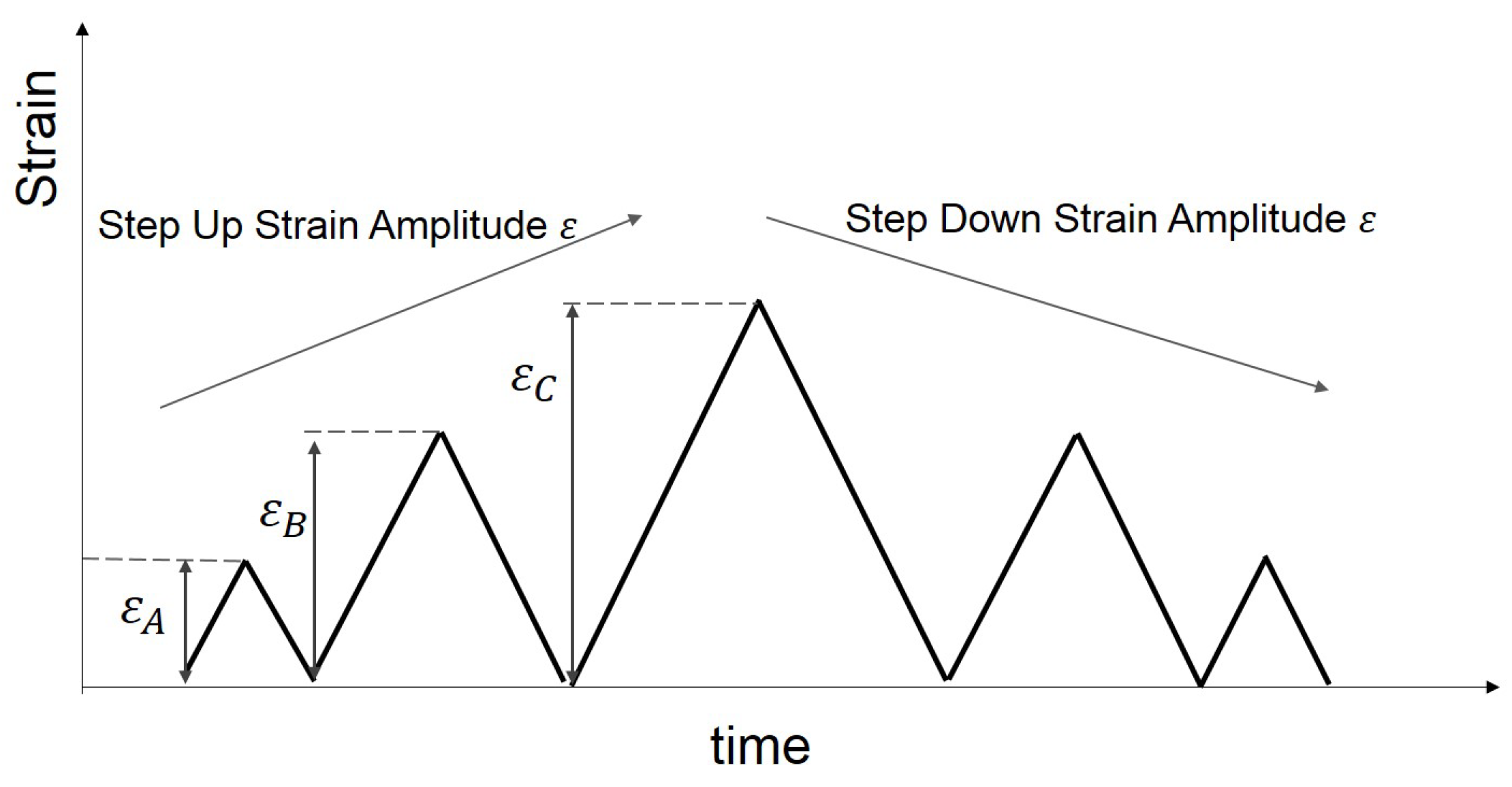
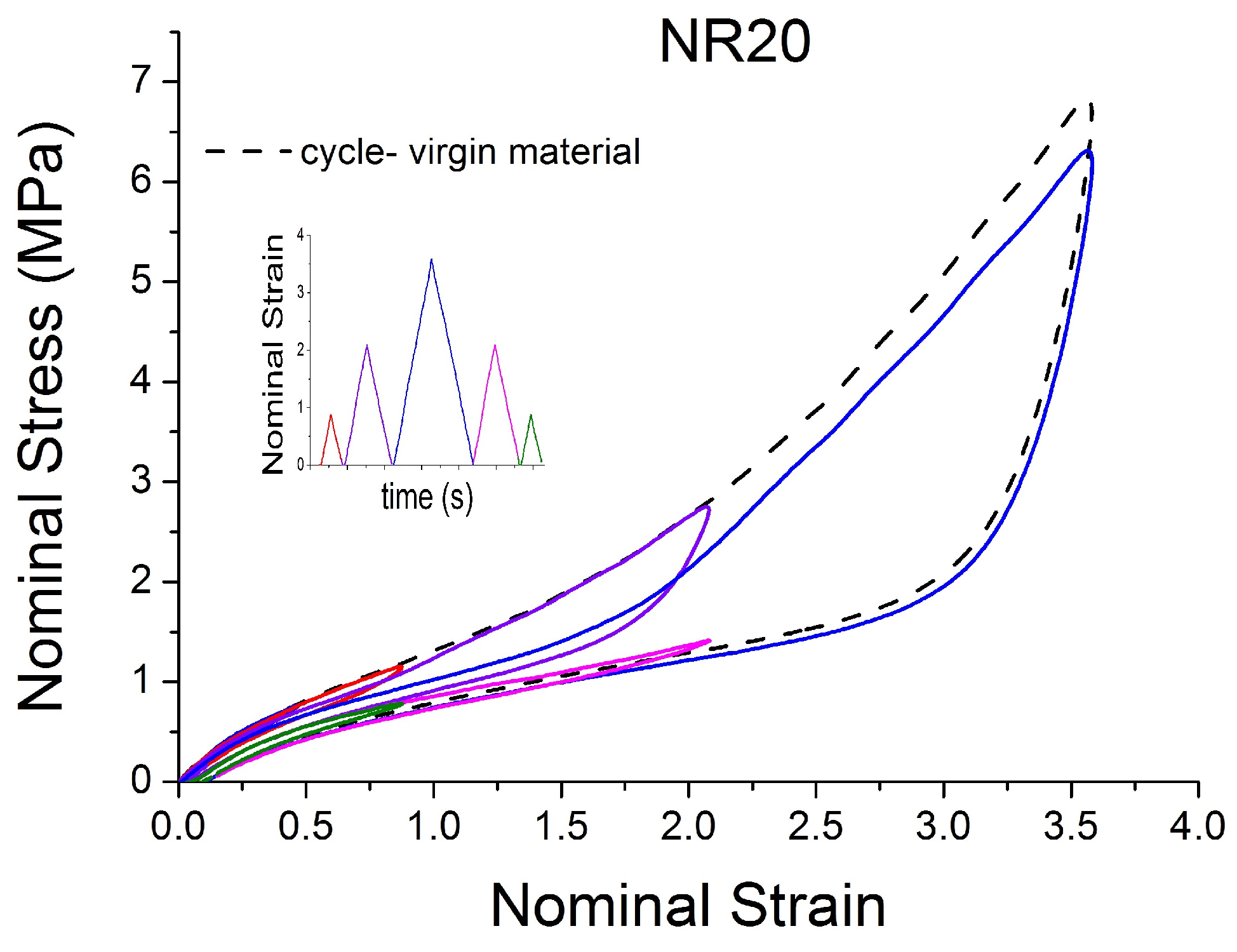
- The material approaches to the virgin loading path whenever the load is increased beyond its previous maximum value (Figure 16).
- The stress–strain path is highly dependent on the loading history (Figure 16). In the following sections, this phenomenon is referred to as the pre-strain effect.
3. Preliminary Remark
3.1. Basics of Continuum Mechanics
3.2. Determination of Model Parameters and Correlation Matrix
4. Nonlinear Viscoelastic Models
4.1. Phenomenological Models
4.1.1. Damage Models
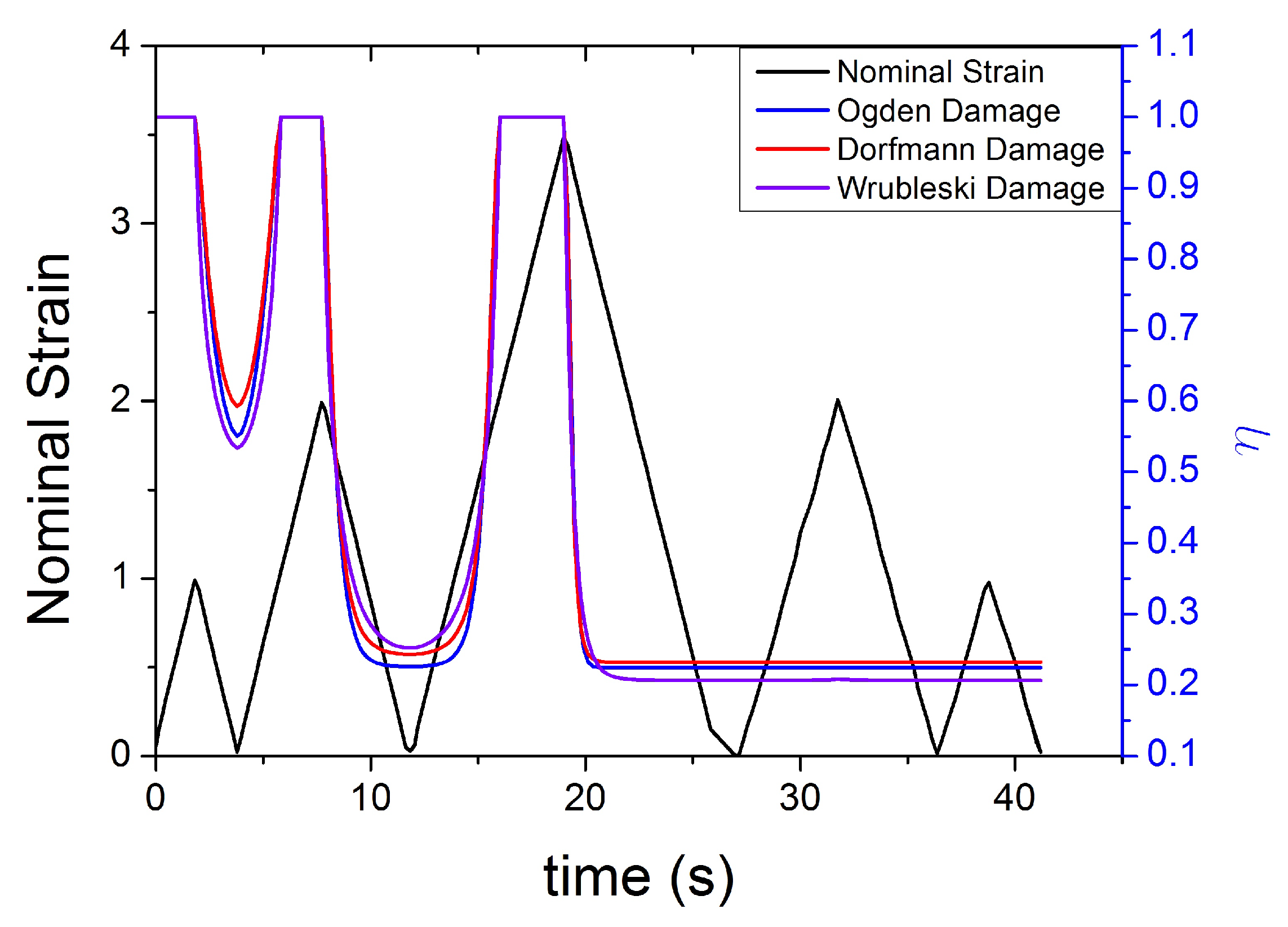
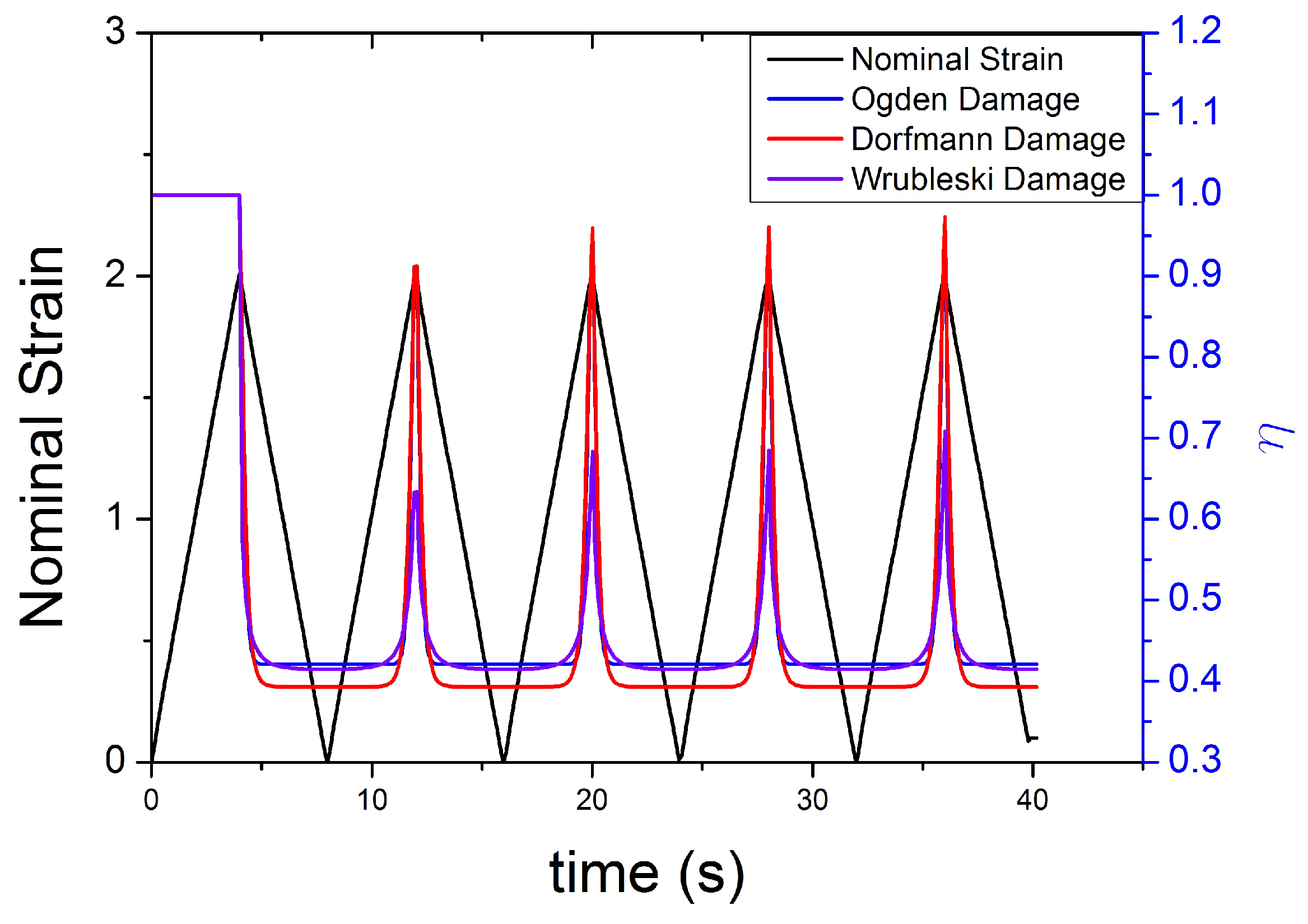
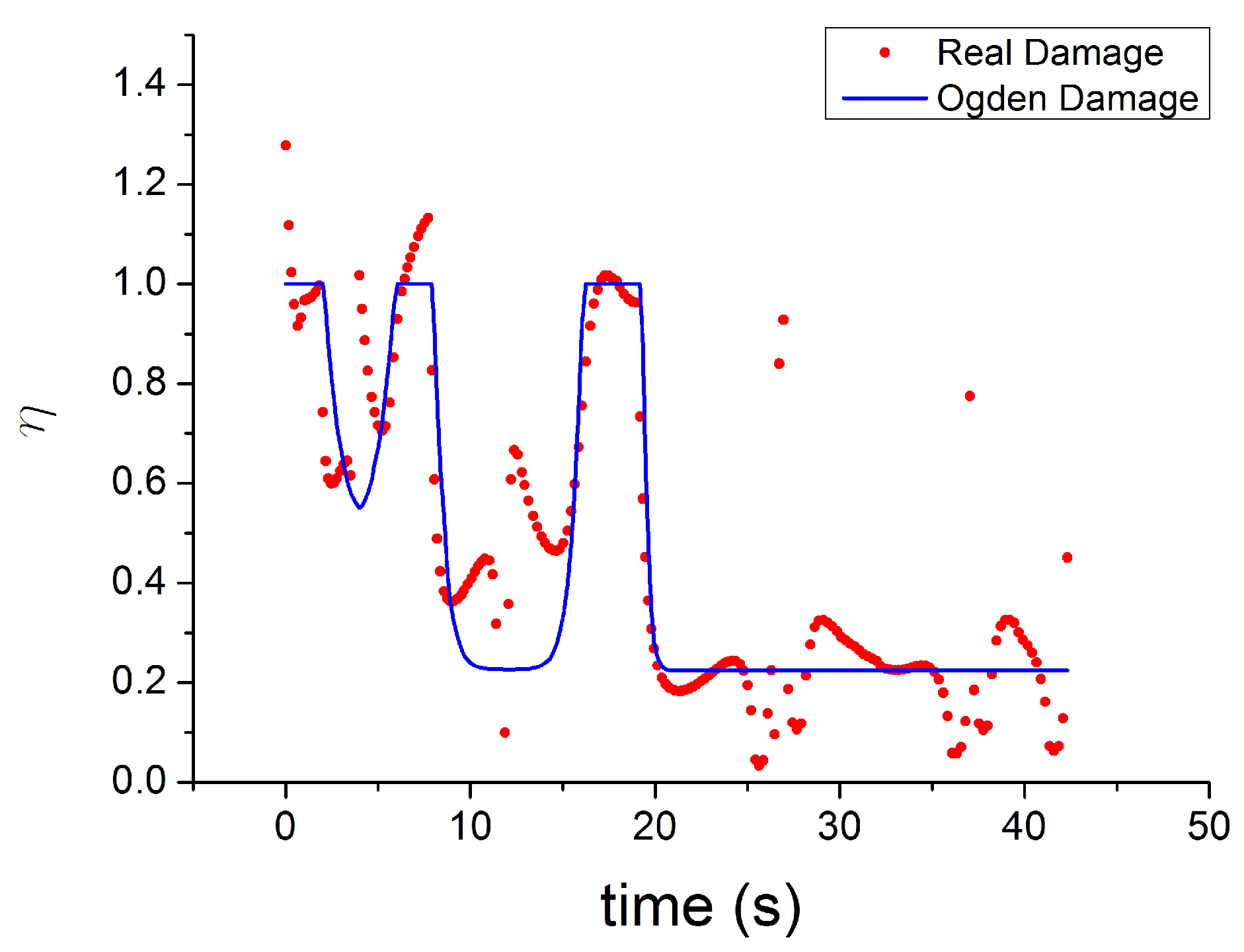
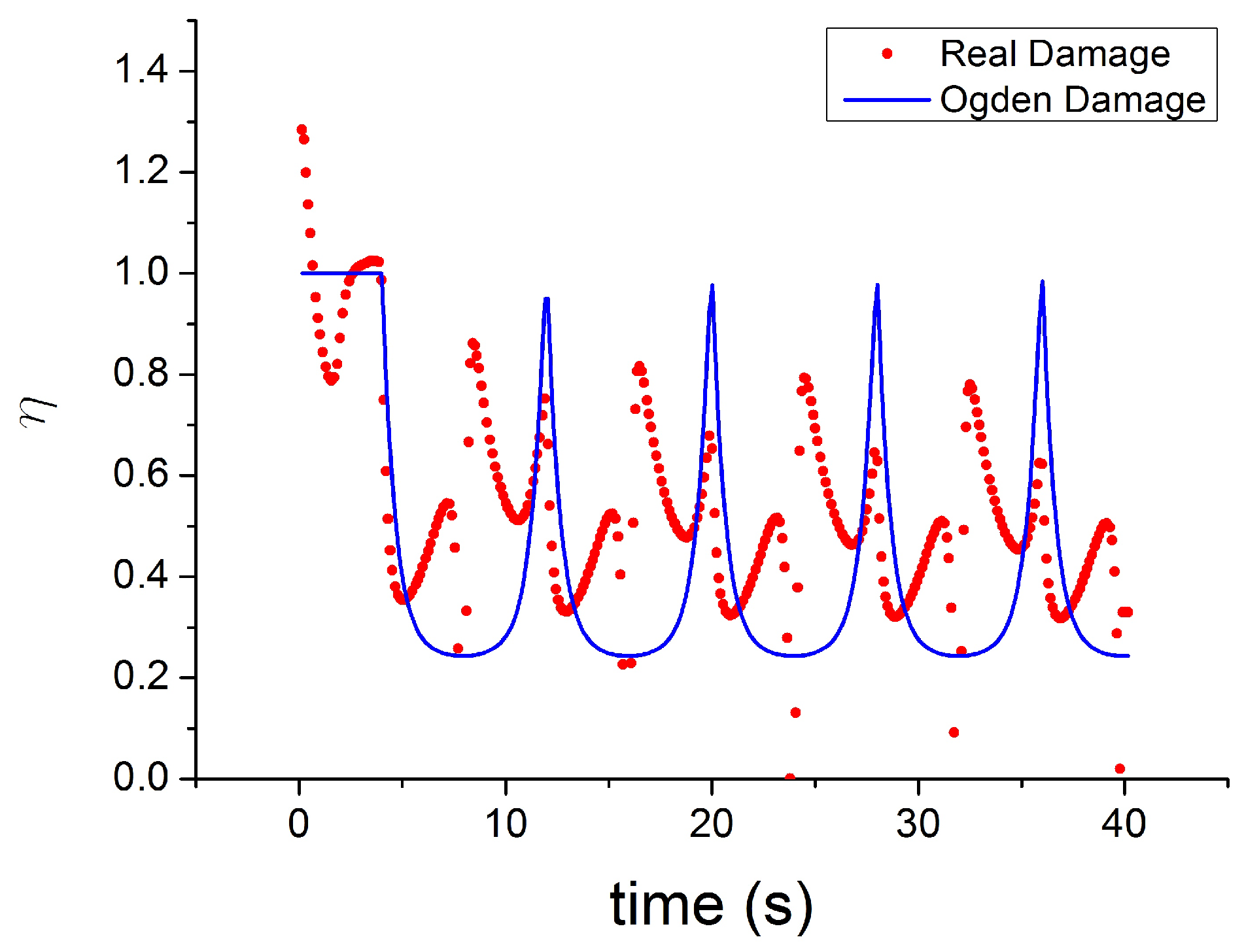
- It has no symmetry during the unloading and reloading phase of each cycle.
- It is not constant after significant peak strain when the material is reloaded to a smaller strain.
- It never returns to the value 1 (there is always a softening when the material is reloaded even at a fixed maximum strain amplitude).
4.1.2. Additive Split of the Stress
4.1.3. Constitutive Laws Based on a Rubber Elasticity Model
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| NR | Natural Rubber |
| PHR | Part per Hundred Rubber |
| SBR | Styrene-Butadiene Rubber |
| NBR | Nitrile Butadiene Rubber |
| EPDM | Ethylene Propylene Diene Monomer Rubber |
| TARRC | Tun Abdul Razak Research Center |
| SMR | Standard Malaysian Rubber |
| FEF | Fast Extruding Furnace |
| HPPD | Hydroxyphenylpyruvate Dioxygenase |
| CBS | N-Cyclohexyl-2-benzothiazole sulfenamide |
| DMA | Dynamic Mechanical Analysis |
| DFM | Dynamic Flocculation Model |
| PRF | Parallel Rheological Framework |
References
- Busfield, J.; Davies, C. Stiffness of simple bonded elastomer bushes. Part 1–Initial behaviour. Plast. Rubber Compos. 2001, 30, 243–257. [Google Scholar] [CrossRef]
- Degrange, J.M.; Thomine, M.; Kapsa, P.; Pelletier, J.M.; Chazeau, L.; Vigier, G.; Dudragne, G.; Guerbe, L. Influence of viscoelasticity on the tribological behaviour of carbon black filled nitrile rubber (NBR) for lip seal application. Wear 2005, 259, 684–692. [Google Scholar] [CrossRef]
- Tárrago, M.G.; Kari, L.; Vinolas, J.; Gil-Negrete, N. Frequency and amplitude dependence of the axial and radial stiffness of carbon-black filled rubber bushings. Polym. Test. 2007, 26, 629–638. [Google Scholar] [CrossRef]
- Gil-Negrete, N.; Vinolas, J.; Kari, L. A simplified methodology to predict the dynamic stiffness of carbon-black filled rubber isolators using a finite element code. J. Sound Vib. 2006, 296, 757–776. [Google Scholar] [CrossRef]
- Franceschini, G.; Bigoni, D.; Regitnig, P.; Holzapfel, G.A. Brain tissue deforms similarly to filled elastomers and follows consolidation theory. J. Mech. Phys. Solids 2006, 54, 2592–2620. [Google Scholar] [CrossRef]
- Alastrué, V.; Peña, E.; Martínez, M.; Doblaré, M. Experimental study and constitutive modelling of the passive mechanical properties of the ovine infrarenal vena cava tissue. J. Biomech. 2008, 41, 3038–3045. [Google Scholar] [CrossRef] [PubMed]
- Maher, E.; Creane, A.; Lally, C.; Kelly, D.J. An anisotropic inelastic constitutive model to describe stress softening and permanent deformation in arterial tissue. J. Mech. Behav. Biomed. Mater. 2012, 12, 9–19. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fereidoonnezhad, B.; Naghdabadi, R.; Holzapfel, G. Stress softening and permanent deformation in human aortas: Continuum and computational modeling with application to arterial clamping. J. Mech. Behav. Biomed. Mater. 2016, 61, 600–616. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Kang, G.; Yu, C.; Poh, L.H. Logarithmic rate based elasto-viscoplastic cyclic constitutive model for soft biological tissues. J. Mech. Phys. Solids 2016, 61, 397–409. [Google Scholar] [CrossRef] [PubMed]
- Merabia, S.; Sotta, P.; Long, D.R. A microscopic model for the reinforcement and the nonlinear behavior of filled elastomers and thermoplastic elastomers (Payne and Mullins effects). Macromolecules 2008, 41, 8252–8266. [Google Scholar] [CrossRef]
- Baeurle, S.A.; Usami, T.; Gusev, A.A. A new multiscale modeling approach for the prediction of mechanical properties of polymer-based nanomaterials. Polymer 2006, 47, 8604–8617. [Google Scholar] [CrossRef]
- Gooneie, A.; Schuschnigg, S.; Holzer, C. A review of multiscale computational methods in polymeric materials. Polymers 2017, 9, 16. [Google Scholar] [CrossRef]
- Boyce, M.C.; Arruda, E.M. Constitutive models of rubber elasticity: A review. Rubber Chem. Technol. 2000, 73, 504–523. [Google Scholar] [CrossRef]
- Chagnon, G.; Marckmann, G.; Verron, E. A comparison of the Hart-Smith model with Arruda-Boyce and Gent formulations for rubber elasticity. Rubber Chem. Technol. 2004, 77, 724–735. [Google Scholar] [CrossRef] [Green Version]
- Marckmann, G.; Verron, E. Comparison of hyperelastic models for rubber-like materials. Rubber Chem. Technol. 2006, 79, 835–858. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.; Hosseini, M.; Sahari, B. A review of constitutive models for rubber-like materials. Am. J. Eng. Appl. Sci. 2010, 3, 232–239. [Google Scholar] [CrossRef]
- Seibert, D.; Schoche, N. Direct comparison of some recent rubber elasticity models. Rubber Chem. Technol. 2000, 73, 366–384. [Google Scholar] [CrossRef]
- Bergstrom, J.S. Mechanics of Solid Polymers: Theory and Computational Modeling; William Andrew: Norwich, NY, USA, 2015. [Google Scholar]
- Schmidt, A.; Gaul, L. FE implementation of viscoelastic constitutive stress–strain relations involving fractional time derivatives. Const. Models Rubber 2001, 2, 79–92. [Google Scholar]
- Pritz, T. Five-parameter fractional derivative model for polymeric damping materials. J. Sound Vib. 2003, 265, 935–952. [Google Scholar] [CrossRef]
- Sasso, M.; Palmieri, G.; Amodio, D. Application of fractional derivative models in linear viscoelastic problems. Mech. Time Depend. Mater. 2011, 15, 367–387. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, C.; Han, B.; Duan, Z. A creep constitutive model for salt rock based on fractional derivatives. Int. J. Rock Mech. Min. Sci. 2011, 48, 116–121. [Google Scholar] [CrossRef]
- Nandi, B.; Dalrymple, T.; Yao, J.; Lapczyk, I. Importance of capturing nonlinear viscoelastic material behavior in tire rolling simulations. In Proceedings of the 33rd Annual Meeting and Conference on the Tire Science and Technology, Akron, OH, USA, 8–10 September 2014. [Google Scholar]
- Qi, H.; Boyce, M. Constitutive model for stretch-induced softening of the stress–stretch behavior of elastomeric materials. J. Mech. Phys. Solids 2004, 52, 2187–2205. [Google Scholar] [CrossRef]
- D’Ambrosio, P.; De Tommasi, D.; Ferri, D.; Puglisi, G. A phenomenological model for healing and hysteresis in rubber-like materials. Int. J. Eng. Sci. 2008, 46, 293–305. [Google Scholar] [CrossRef]
- Österlöf, R.; Wentzel, H.; Kari, L. An efficient method for obtaining the hyperelastic properties of filled elastomers in finite strain applications. Polym. Test. 2015, 41, 44–54. [Google Scholar] [CrossRef]
- Österlöf, R.; Wentzel, H.; Kari, L. A finite strain viscoplastic constitutive model for rubber with reinforcing fillers. Int. J. Plast. 2016, 87, 1–14. [Google Scholar] [CrossRef]
- Harwood, J.; Mullins, L.; Payne, A. Stress softening in natural rubber vulcanizates. Part II. Stress softening effects in pure gum and filler loaded rubbers. J. Appl. Polym. Sci. 1965, 9, 3011–3021. [Google Scholar] [CrossRef]
- Mullins, L. Softening of rubber by deformation. Rubber Chem. Technol. 1969, 42, 339–362. [Google Scholar] [CrossRef]
- Clément, F.; Bokobza, L.; Monnerie, L. On the Mullins effect in silica-filled polydimethylsiloxane networks. Rubber Chem. Technol. 2001, 74, 847–870. [Google Scholar] [CrossRef]
- Diani, J.; Brieu, M.; Vacherand, J. A damage directional constitutive model for Mullins effect with permanent set and induced anisotropy. Eur. J. Mech. 2006, 25, 483–496. [Google Scholar] [CrossRef]
- Dorfmann, A.; Ogden, R. A pseudo-elastic model for loading, partial unloading and reloading of particle-reinforced rubber. Int. J. Solids Struct. 2003, 40, 2699–2714. [Google Scholar] [CrossRef]
- Huang, M.; Tunnicliffe, L.B.; Thomas, A.G.; Busfield, J.J. The glass transition, segmental relaxations and viscoelastic behaviour of particulate-reinforced natural rubber. Eur. Polym. J. 2015, 67, 232–241. [Google Scholar] [CrossRef]
- Yamaguchi, K.; Thomas, A.G.; Busfield, J.J. Stress relaxation, creep and set recovery of elastomers. Int. J. Non-Linear Mech. 2015, 68, 66–70. [Google Scholar] [CrossRef]
- Holzapfel, A.G. Nonlinear Solid Mechanics II; John Wiley & Sons Ltd.: Chichester, UK, 2000. [Google Scholar]
- Gonzalez, O.; Stuart, A.M. A First Course in Continuum Mechanics; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Iooss, B.; Lemaître, P. A review on global sensitivity analysis methods. In Uncertainty Management in Simulation-Optimization of Complex Systems; Springer: Berline, Germany, 2015; pp. 101–122. [Google Scholar]
- Lion, A. A constitutive model for carbon black filled rubber: Experimental investigations and mathematical representation. Contin. Mech. Thermodyn. 1996, 8, 153–169. [Google Scholar] [CrossRef]
- Lion, A. Thixotropic behaviour of rubber under dynamic loading histories: Experiments and theory. J. Mech. Phys. Solids 1998, 46, 895–930. [Google Scholar] [CrossRef]
- Lion, A.; Kardelky, C. The Payne effect in finite viscoelasticity: Constitutive modelling based on fractional derivatives and intrinsic time scales. Int. J. Plast. 2004, 20, 1313–1345. [Google Scholar] [CrossRef]
- Ramrakhyani, D.S.; Lesieutre, G.A.; Smith, E.C. Modeling of elastomeric materials using nonlinear fractional derivative and continuously yielding friction elements. Int. J. Solids Struct. 2004, 41, 3929–3948. [Google Scholar] [CrossRef]
- Diani, J.; Brieu, M.; Vacherand, J.M.; Rezgui, A. Directional model for isotropic and anisotropic hyperelastic rubber-like materials. Mech. Mater. 2004, 36, 313–321. [Google Scholar] [CrossRef]
- Rebouah, M.; Machado, G.; Chagnon, G.; Favier, D. Anisotropic Mullins stress softening of a deformed silicone holey plate. Mech. Res. Commun. 2013, 49, 36–43. [Google Scholar] [CrossRef]
- Simo, J.C. On a fully three-dimensional finite-strain viscoelastic damage model: Formulation and computational aspects. Comput. Methods Appl. Mech. Eng. 1987, 60, 153–173. [Google Scholar] [CrossRef]
- Ogden, R.; Roxburgh, D. A pseudo—Elastic model for the Mullins effect in filled rubber. Proc. R. Soc. Lond. A 1999, 455, 2861–2877. [Google Scholar] [CrossRef]
- Wrubleski, E.G.M.; Marczak, R.J. A modification of hyperelastic incompressible constitutive models to include non-conservative effects. In Proceedings of the 22nd International Congress of Mechanical Engineering (COBEM 2013), Ribeirão Preto, SP, Brazil, 3–7 November 2013; pp. 2176–5480. [Google Scholar]
- Wrubleski, E.G.M.; Marczak, R.J. Inclusion of non-conservative effects in traditional hyperelastic incompressible constitutive models. In Proceedings of the 14th Pan-American Congress of Applied Mechanics, Santiago, Chile, 24–28 March 2014. [Google Scholar]
- Wrubleski, E.G.M.; Marczak, R.J. Three dimensional finite element code for finite strain with isotropic softening. In Ibero-Latin American Congress on Computational Methods in Engineering (36.: 2015: Rio de Janeiro); ABMEC: Rio de Janeiro, Brazil, 2015. [Google Scholar]
- Guo, Z.; Sluys, L. Computational modelling of the stress-softening phenomenon of rubber-like materials under cyclic loading. Eur. J. Mech. 2006, 25, 877–896. [Google Scholar] [CrossRef]
- Diani, J.; Fayolle, B.; Gilormini, P. A review on the Mullins effect. Eur. Polym. J. 2009, 45, 601–612. [Google Scholar] [CrossRef]
- Bergström, J.; Boyce, M. Constitutive modeling of the large strain time-dependent behavior of elastomers. J. Mech. Phys. Solids 1998, 46, 931–954. [Google Scholar] [CrossRef]
- Miehe, C.; Keck, J. Superimposed finite elastic–viscoelastic–plastoelastic stress response with damage in filled rubbery polymers. Experiments, modelling and algorithmic implementation. J. Mech. Phys. Solids 2000, 48, 323–365. [Google Scholar] [CrossRef]
- Lin, R.; Schomburg, U. A finite elastic–viscoelastic–elastoplastic material law with damage: Theoretical and numerical aspects. Comput. Methods Appl. Mech. Eng. 2003, 192, 1591–1627. [Google Scholar] [CrossRef]
- Liu, M.; Fatt, M.S.H. A constitutive equation for filled rubber under cyclic loading. Int. J. Non-Linear Mech. 2011, 46, 446–456. [Google Scholar] [CrossRef]
- Bergstrom, J.S.; Boyce, M.C. Mechanical behavior of particle filled elastomers. Rubber Chem. Technol. 1999, 72, 633–656. [Google Scholar] [CrossRef]
- Bergström, J.; Boyce, M. Large strain time-dependent behavior of filled elastomers. Mech. Mater. 2000, 32, 627–644. [Google Scholar] [CrossRef]
- Bergström, J.; Boyce, M. Constitutive modeling of the time-dependent and cyclic loading of elastomers and application to soft biological tissues. Mech. Mater. 2001, 33, 523–530. [Google Scholar] [CrossRef]
- Hurtado, J.; Lapczyk, I.; Govindarajan, S. Parallel rheological framework to model nonlinear viscoelasticity, permanent set, and Mullins effect in elastomers. In Constitutive Models for Rubber VIII; Taylor & Francis Group: London, UK, 2013; p. 95. [Google Scholar]
- Besdo, D.; Ihlemann, J. A phenomenological constitutive model for rubberlike materials and its numerical applications. Int. J. Plast. 2003, 19, 1019–1036. [Google Scholar] [CrossRef]
- Freund, M.; Ihlemann, J. Generalization of one-dimensional material models for the finite element method. ZAMM J. Appl. Math. Mech. 2010, 90, 399–417. [Google Scholar] [CrossRef]
- Rickaby, S.; Scott, N. A cyclic stress softening model for the Mullins effect. Int. J. Solids Struct. 2013, 50, 111–120. [Google Scholar] [CrossRef]
- Treloar, L.R.G. The Physics of Rubber Elasticity; Oxford University Press: Oxford, MI, USA, 1975. [Google Scholar]
- Klüppel, M. The role of disorder in filler reinforcement of elastomers on various length scales. In Filler-Reinforced Elastomers/Sanning Force Microscopy; Springer: Berlin/Heidelberg, Germany, 2003; pp. 1–86. [Google Scholar]
- Kluppel, M.; Meier, J.; Damgen, M. Modeling of stress softening and filler induced hysteresis of elastomer materials. Const. Models Rubber 2005, 4, 171. [Google Scholar]
- Lorenz, H.; Freund, M.; Juhre, D.; Ihlemann, J.; Klüppel, M. Constitutive Generalization of a Microstructure- Based Model for Filled Elastomers. Macromol. Theory Simul. 2011, 20, 110–123. [Google Scholar] [CrossRef]
- Lorenz, H.; Klüppel, M. Microstructure-based modelling of arbitrary deformation histories of filler-reinforced elastomers. J. Mech. Phys. Solids 2012, 60, 1842–1861. [Google Scholar] [CrossRef]
- Juhre, D.; Raghunath, R.; Klüppel, M.; Lorenz, H. A microstructure-based model for filled elastomers including time-dependent effects. Const. Models Rubber 2013, 8, 293. [Google Scholar]
- Raghunath, R.; Juhre, D.; Klüppel, M. A physically motivated model for filled elastomers including strain rate and amplitude dependency in finite viscoelasticity. Int. J. Plast. 2016, 78, 223–241. [Google Scholar] [CrossRef]
- Freund, M.; Lorenz, H.; Juhre, D.; Ihlemann, J.; Klüppel, M. Finite element implementation of a microstructure-based model for filled elastomers. Int. J. Plast. 2011, 27, 902–919. [Google Scholar] [CrossRef]
- Li, Y.; Tang, S.; Kröger, M.; Liu, W.K. Molecular simulation guided constitutive modeling on finite strain viscoelasticity of elastomers. J. Mech. Phys. Solids 2016, 88, 204–226. [Google Scholar] [Green Version]
- Davidson, J.D.; Goulbourne, N. A nonaffine network model for elastomers undergoing finite deformations. J. Mech. Phys. Solids 2013, 61, 1784–1797. [Google Scholar] [CrossRef]
- Plagge, J.; Klüppel, M. A physically based model of stress softening and hysteresis of filled rubber including rate-and temperature dependency. Int. J. Plast. 2017, 89, 173–196. [Google Scholar] [CrossRef]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| - | NR2 | NR10 | NR20 | NR30 | NR40 | NR50 | NR60 |
|---|---|---|---|---|---|---|---|
| Natural Rubber, SMR CV60 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| Carbon Black, FEF N550 | 2 | 10 | 20 | 30 | 40 | 50 | 60 |
| Process oil, 410 | - | 1 | 2 | 3 | 4 | 5 | 6 |
| Zinc oxide | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Stearic acid | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Antioxidant/antiozonant, HPPD | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
| Antiozonant wax | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Sulfur | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 |
| Accelerator, CBS | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 |
| Model | Year | Num. Params | Predict. | Hysteresis | Mullins | Pre-Strain | Cyclic Stress Relaxation | Strain Rate |
|---|---|---|---|---|---|---|---|---|
| Ogden [45] | 1999 | 2 + hyp. | X | |||||
| Dorfmann [32] | 2003 | 3 + hyp. | X | |||||
| Wrublesky [48] | 2015 | 3 + hyp. | X | |||||
| Bergstrom-Boyce [51] | 1998 | 4 + hyp. | X | X | ||||
| PRF | 2013 | >10 | X | X | X | X | X | |
| MORPH [59] | 2003 | 8 | X | X | small | small | small ( cycle) | |
| Plagge [72] | 2017 | 7 | X | X | X | X |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carleo, F.; Barbieri, E.; Whear, R.; Busfield, J.J.C. Limitations of Viscoelastic Constitutive Models for Carbon-Black Reinforced Rubber in Medium Dynamic Strains and Medium Strain Rates. Polymers 2018, 10, 988. https://doi.org/10.3390/polym10090988
Carleo F, Barbieri E, Whear R, Busfield JJC. Limitations of Viscoelastic Constitutive Models for Carbon-Black Reinforced Rubber in Medium Dynamic Strains and Medium Strain Rates. Polymers. 2018; 10(9):988. https://doi.org/10.3390/polym10090988
Chicago/Turabian StyleCarleo, Francesca, Ettore Barbieri, Roly Whear, and James J. C. Busfield. 2018. "Limitations of Viscoelastic Constitutive Models for Carbon-Black Reinforced Rubber in Medium Dynamic Strains and Medium Strain Rates" Polymers 10, no. 9: 988. https://doi.org/10.3390/polym10090988