
Object-Based Approach for Multi-Scale Mangrove Composition Mapping Using Multi-Resolution Image Datasets



Abstract
:
1. Introduction

2. Materials and Methods
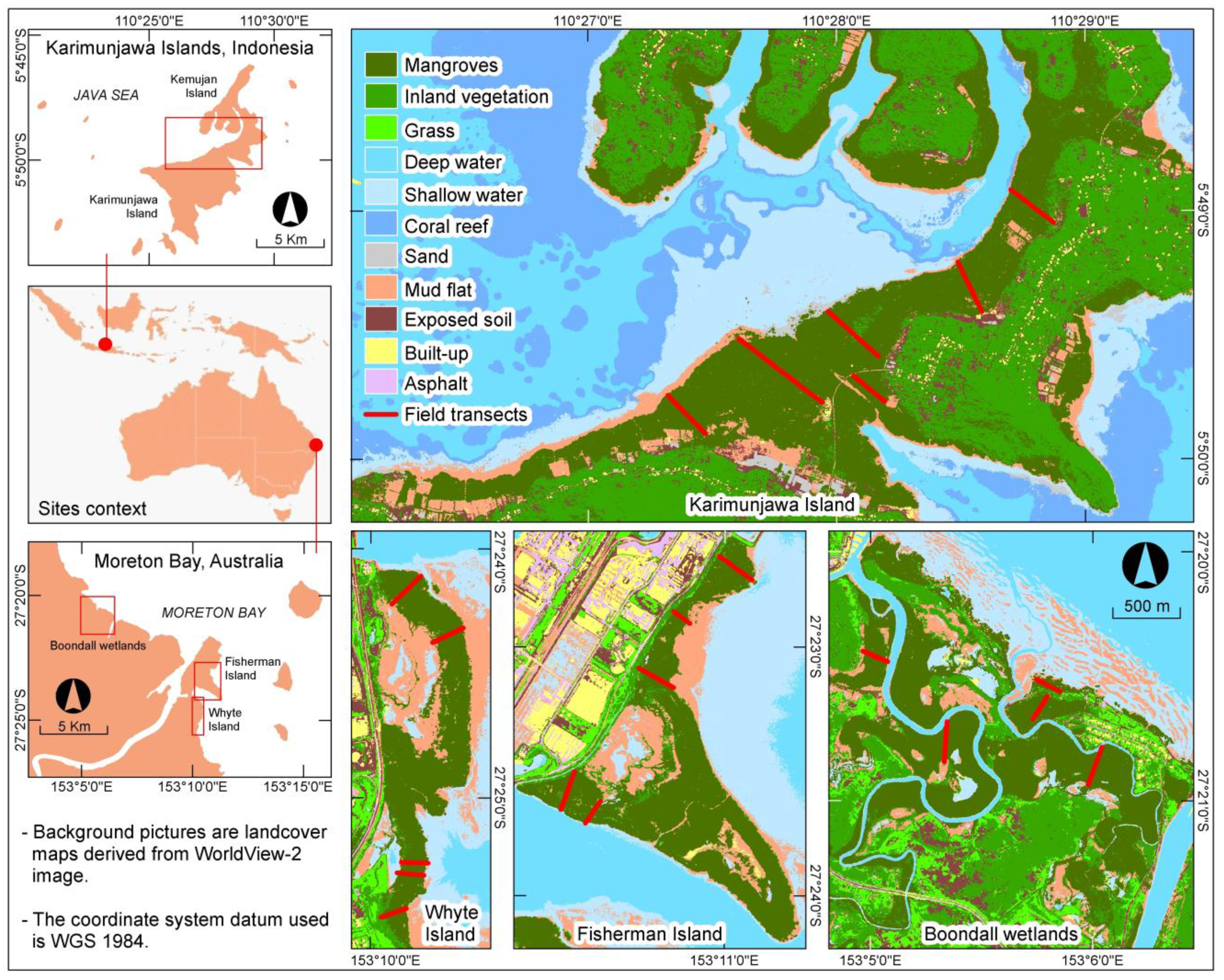
2.1. Study Area

2.2. Image Datasets

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Type | Moreton Bay Image Acquisition Date | Karimunjawa Island Image Acquisition Date | Pixel Size | Spectral Attributes (nm) | Geometric Attributes |
|---|---|---|---|---|---|
| Landsat TM | 14 April 2011 | 31 July 2009 | 30 m | Blue (452–518), green (528–609), red (626–693), NIR (776–904), MIR1 (1567–1784), MIR2 (2097–2349) | Level 1T |
| ALOS AVNIR-2 | 10 April 2011 | 19 February 2009 | 10 m | Blue (420–500), green (520–600), red (610–690), NIR (760–890) | Level 1B2G |
| WorldView-2 | 14 April 2011 | 24 May 2012 | 2 m (multi), 0.5 m (pan) | Coastal blue (400–450), blue (450–510), green (510–580), yellow (585–625), red (630–690), red edge (705–745), NIR1 (770-895), NIR2 (860–1040), panchromatic (450–800) | Level 3X |
| LiDAR | April 2009 | - | 2.8 pts/m2 | - | Geo-referenced |
| Aerial photo | 14 January 2011 | - | 7.5 cm | RGB image | Geo-referenced |
2.3. Field Datasets
| Mangrove Zones* | Whyte Island | Fisherman Island | Boondall Wetlands | Karimunjawa Islands |
|---|---|---|---|---|
| Zone 1 | 10–12 m, closed forest (M4) with single- or multi-stems, high-density canopy cover, Avicennia marina trees. | 8–11 m, closed forest (M4) with single- or multi-stems, high-density canopy cover, Avicennia marina trees. | 8–10.5 m, closed forest (M4) with single- or multi-stems, very high-density canopy cover, Avicennia marina trees with some patches of Ceriops tagal. | 11–15 m, closed forest (M4) with single- or multi-stems, very high-density canopy cover, Rhizophora apiculata trees with some individual Bruguiera gymnorhiza. |
| 6–8 m, low-closed forest (I4) with single-stem, very high-density canopy cover, Avicennia marina trees with some individual Rhizophora stylosa. | 8–10 m, low-closed forest (I4) with single-stem, high-density canopy cover, Avicennia marina with some individual Rhizophora stylosa and patches of Ceriops tagal. | 7–9 m, low-closed forest (I4) with single-stem, very high-density canopy cover, Avicennia marina with some individual Rhizophora stylosa. | 10–13 m, closed forest (M4) with single-stems, very high-density canopy cover, Bruguiera gymnorhiza, Bruguiera cylindrical, Xylocarpus granatum and Excoecaria agallocha. | |
| 4–7 m, low-closed forest (I4) with single- or multi-stems, medium-density canopy cover, Avicennia marina. | 4–9 m, low-closed forest (I4) with single-stem, high-density canopy cover, Avicennia marina. | 5–7.5 m, low-closed forest (I4) with single-stem, very high-density canopy cover, Avicennia marina. | 7–10 m, low-closed forest (I4) with single- or multi-stems, high-density canopy cover, Ceriops tagal and Lumnitzera racemosa. | |
| 1–3 m, open scrub (S3) with multi-stems, low-density canopy cover, Avicennia marina. | 2.5–4 m, open scrub (S3) with single- or multi-stems, low-density canopy cover, Avicennia marina. | 1.5–5 m, open scrub (S3) with single- or multi-stems, medium-density canopy cover, Avicennia marina. | 4–9 m, low multi-stem forest (VL4) with multi-stems, medium-density canopy cover, Ceriops tagal and Lumnitzera racemosa. |
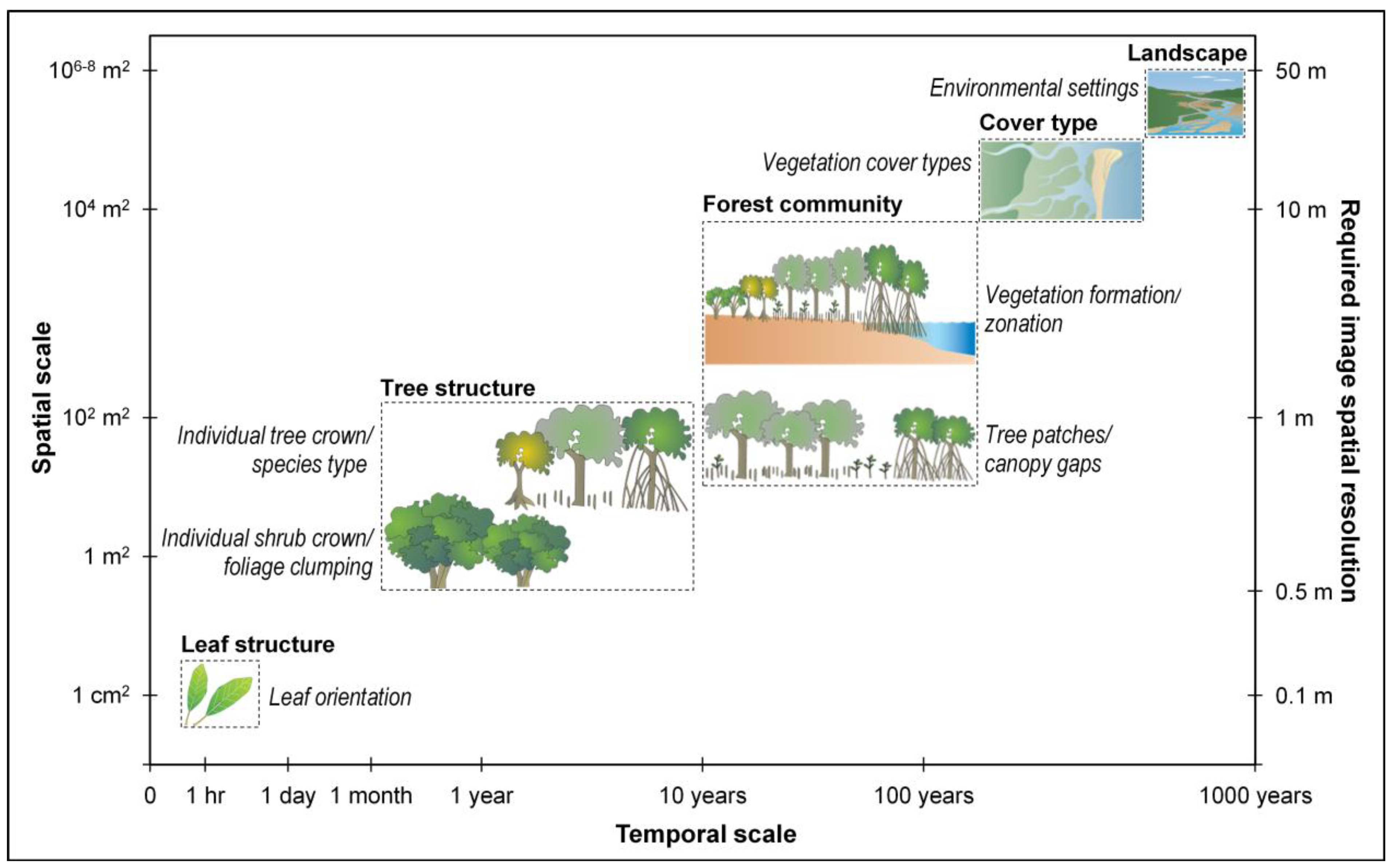
2.4. Mangrove Vegetation Structure Characterization
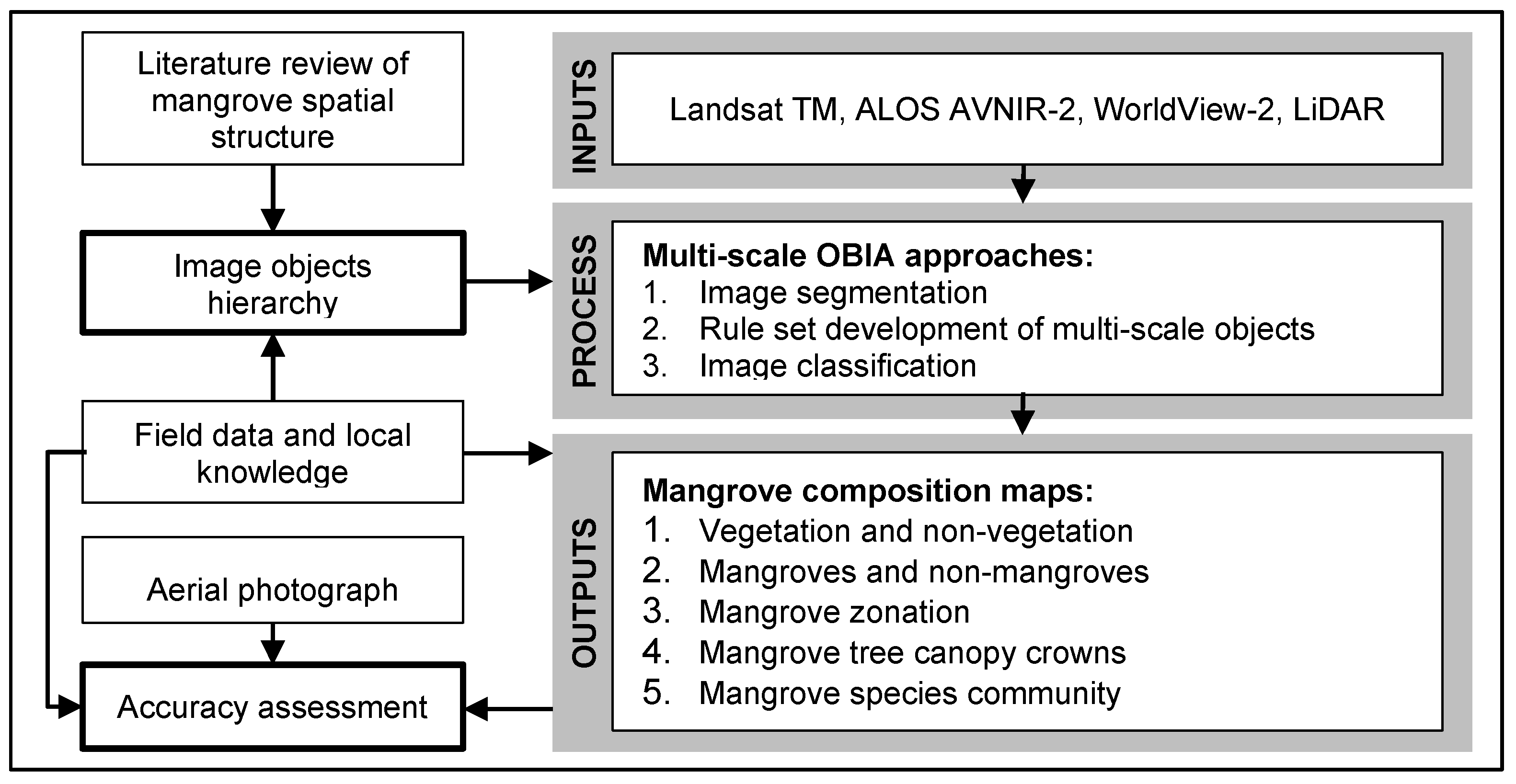
2.5. Overview of the GEOBIA Approach

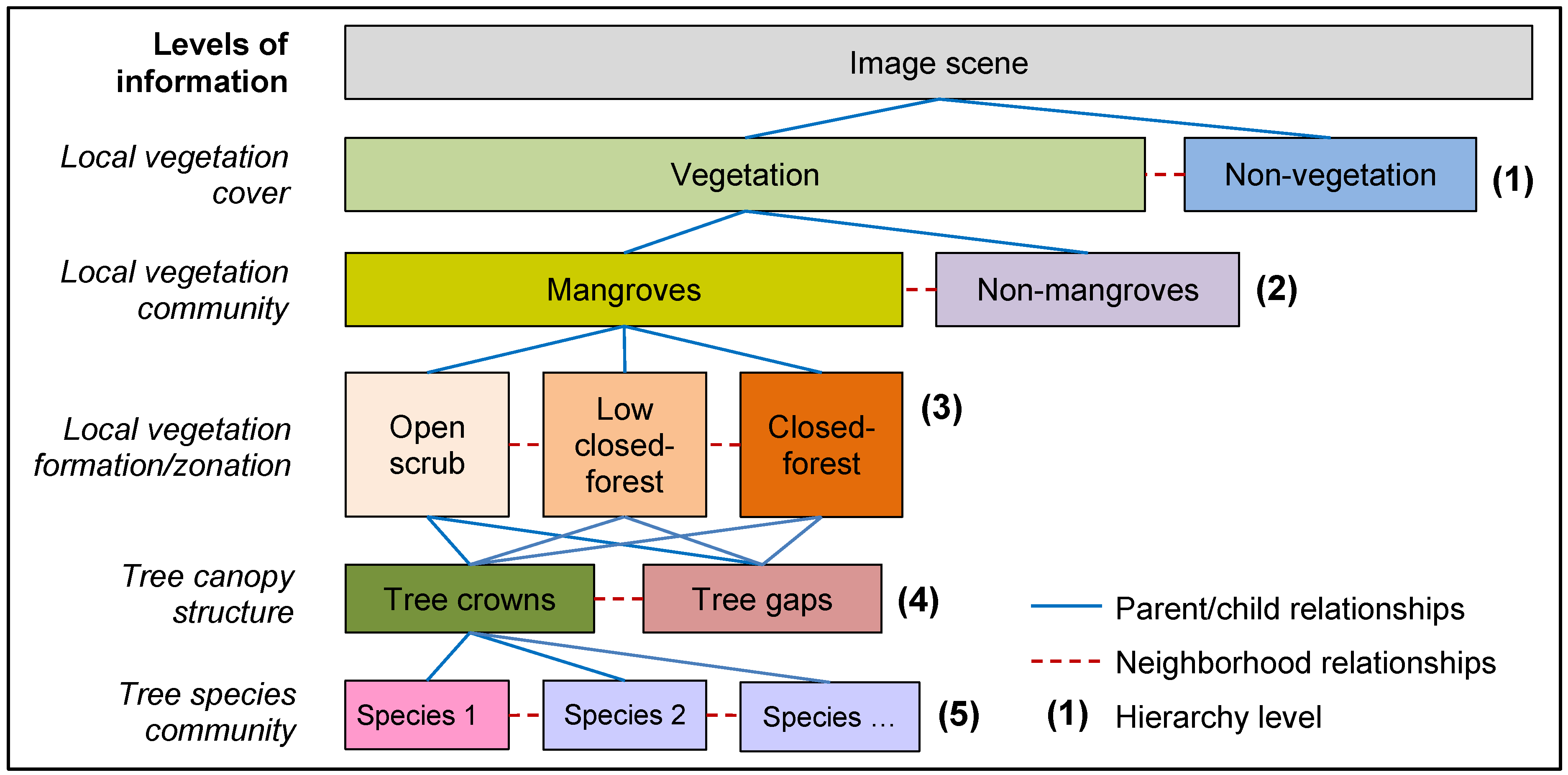
2.5.1. Classification Hierarchy and Rule Sets Development

| No. | Information | Landsat TM | ALOS AVNIR-2 | WorldView-2 | WorldView-2 and LiDAR | |
|---|---|---|---|---|---|---|
| 2.5.2 | Vegetation | Layer arithmetic | Layer arithmetic | Layer arithmetic | Layer arithmetic | |
| Multi-threshold seg. | Multi-threshold seg. | Multi-threshold seg. | Multi-threshold seg. | |||
| FDI > 100 | FDI > 200 | FDI > 0 | FDI > 0 | |||
| Non-vegetation | Not “Vegetation” | Not “Vegetation” | Not “Vegetation” | Not “Vegetation” | ||
| 2.5.3 | Mangroves | Within “Vegetation” | Within “Vegetation” | Within “Vegetation” | Within “Vegetation” | |
| Chessboard seg: 1 | Chessboard seg: 1 | Chessboard seg: 1 | Chessboard seg: 1 | |||
| Mean 4 = 1500 − 3500 | Mean 3 = 300 − 550 | (7 − 5)/(3 − 5) = 8 − 22 | (7 − 5)/(3 − 5) = 8 − 22 | |||
| Mean 5 = 900 − 1450 | Mean 4 = 1000 − 3000 | Mean 5 < 720 | Mean 5 < 720 | |||
| Mean DTM < 1.5 | ||||||
| Non-mangroves | Not “Mangroves” | Not “Mangroves” | Not “Mangroves” | Not “Mangroves” | ||
| 2.5.4 | Zonation bands | Within “Mangroves” | Within “Mangroves” | Within “Mangroves” | ||
| Multiresolution seg. (SP:10, s:0.1, c:0.5) | Multiresolution seg. (SP:25, s:0.1, c:0.5) | Multiresolution seg. (SP:25, s:0.1, c:0.5) | ||||
| Zone 1 | - | 1.5 < 4/(3+1) < 4 | 0 > 7/(5+6) < 1.36 | Mean CHM > 10 | ||
| Coast dist < 75m | Coast dist < 75m | FCC < 1 | ||||
| Zone 2 | - | 2.5 < 4/(3+1) < 6 | 7/(5+6) > 0 | 7 < CHM < 10 | ||
| 25>Coast dist<100m | 25>Coast dist<100m | 0.95 > FCC <1 | ||||
| Zone 3 | - | 1.5 < 4/(3+1) < 4 | 0 > 7/(5+6) < 1.36 | 3 < CHM < 7 | ||
| Coast dist > 100m | Coast dist > 100m | FCC < 0.98 | ||||
| Coast dist > 75 | ||||||
| Zone 4 | - | 1.5 < 4/(3+1) < 6 | 7/(5+6) > 1.36 | CHM < 3 | ||
| Coast dist > 100m | Coast dist > 100m | FCC < 0.98 | ||||
| 2.5.5 | Tree canopy | Canopy gaps | - | - | Within “Mangroves” | Within “Mangroves” |
| Chessboard seg: 1 Within “Mangroves” | Chessboard seg: 1 Mean CHM < 3 | |||||
| Mean PC1 > 500 | ||||||
| Mean PC2 < -250 | ||||||
| Tree crowns | - | - | Not “Canopy gaps” | Not “Canopy gaps” | ||
| Seed based on local maxima of NIR1. | Seed based on local maxima of CHM. | |||||
| Grow seed by ratio to neighbor < 1.2. | Grow seed by ratio to neighbor < 1.5. | |||||
| Opening the seed. | Opening the seed. | |||||
| 2.5.6 | Individual species | - | - | Within “Tree crowns”. | ||
| Nearest Neighbor classification with samples taken from the individual tree crown. | ||||||
2.5.2. Vegetation and Non-Vegetation Separation

2.5.3. Mangroves and Non-Mangroves Discrimination

2.5.4. Mangrove Zonation Pattern Delineation
2.5.5. Mangrove Tree Crown and Gap Delineation
2.5.6. Mangrove Species Community Identification
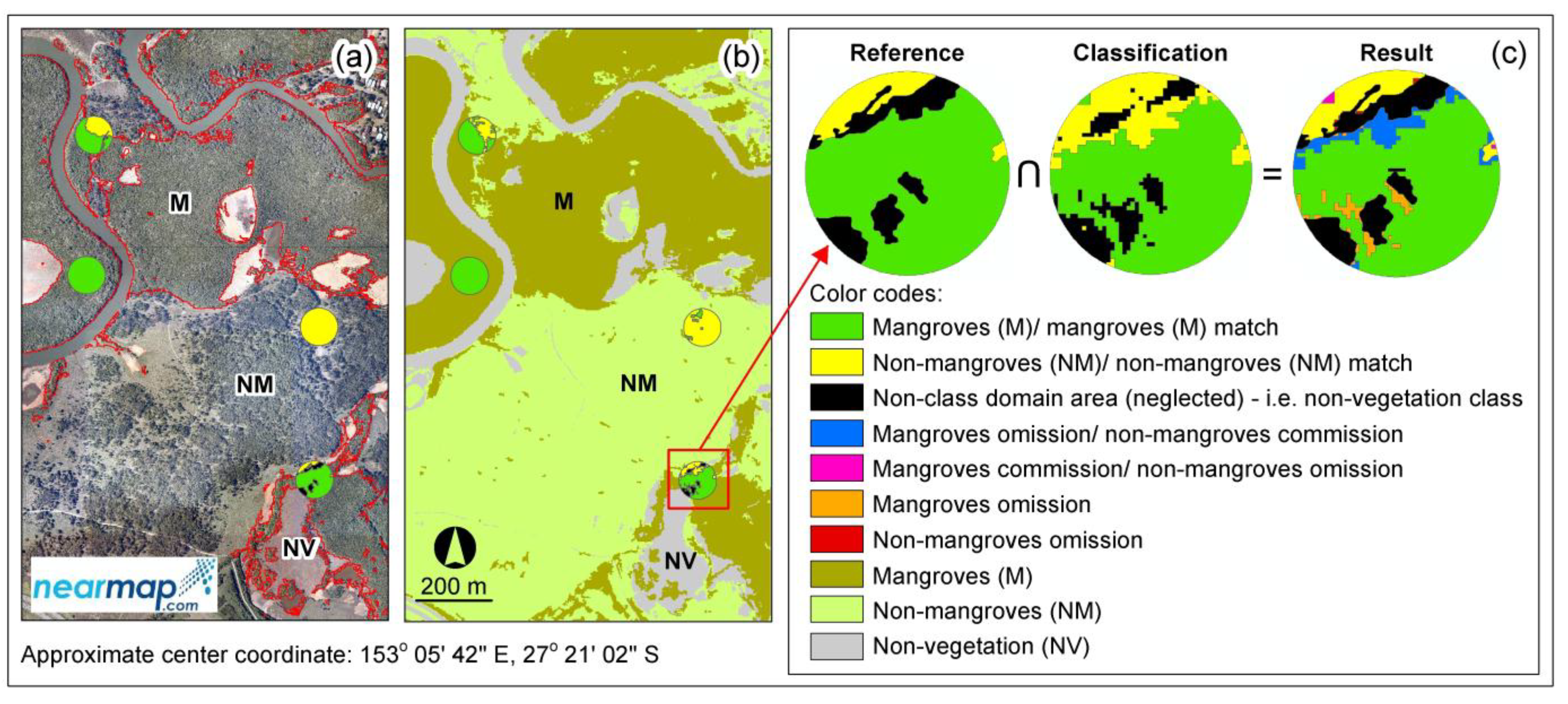
2.6. Mangrove Composition Mapping Validation
| Measure | Equations | Equation Number |
|---|---|---|
| Overall Quality (OQ) | 3 | |
| User’s Accuracy (UA) | 4 | |
| Producer’s Accuracy (PA) | 5 | |
| Overall Accuracy (OA) | 6 |

3. Results and Discussion
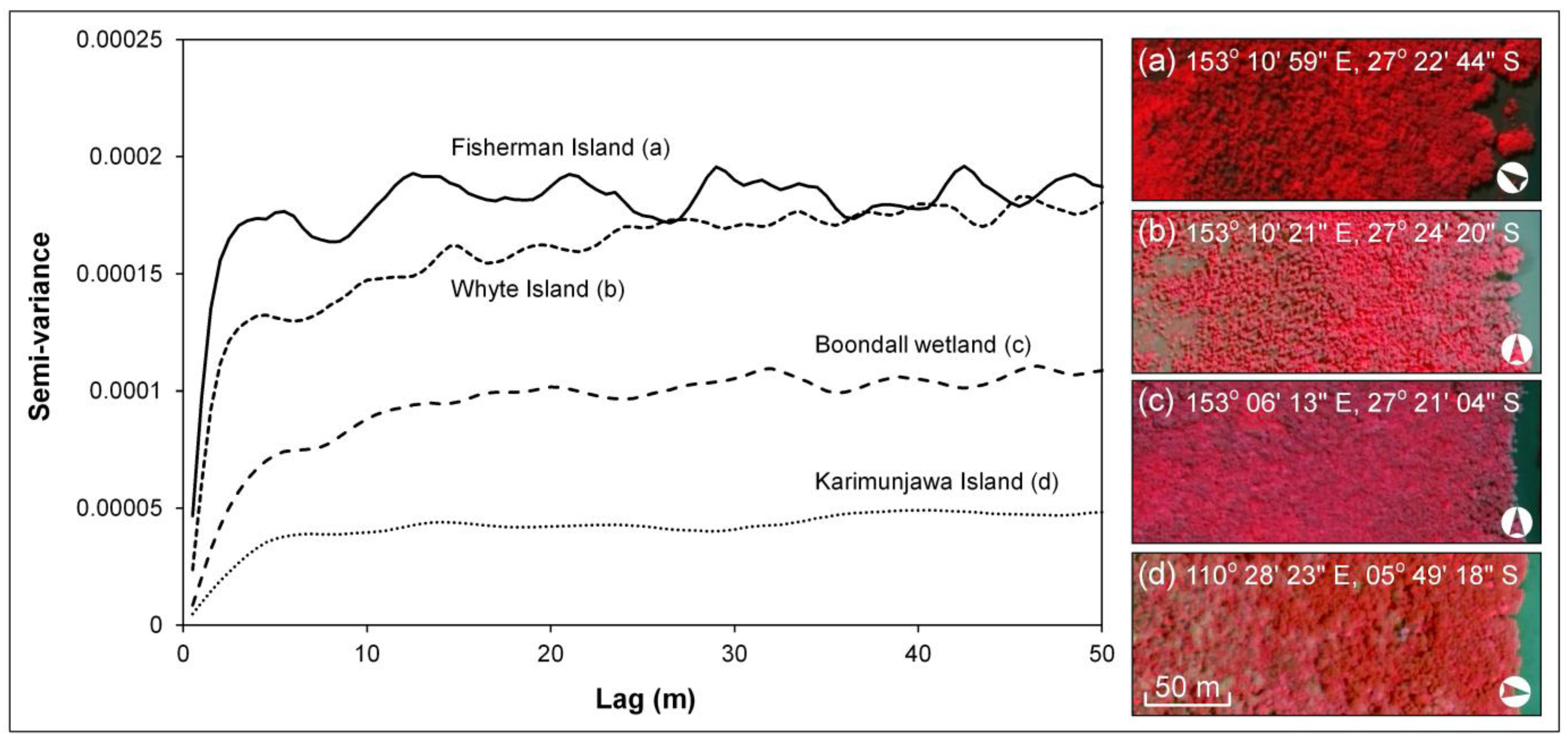
3.1. Mangrove Spatial Structure from Semi-Variogram Analysis

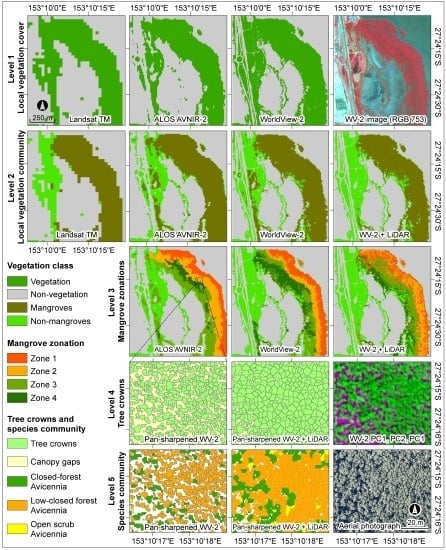
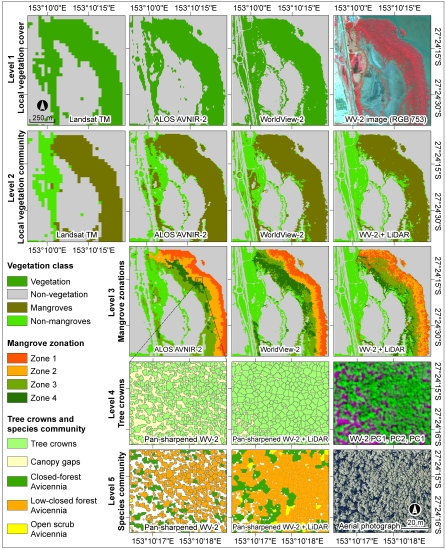
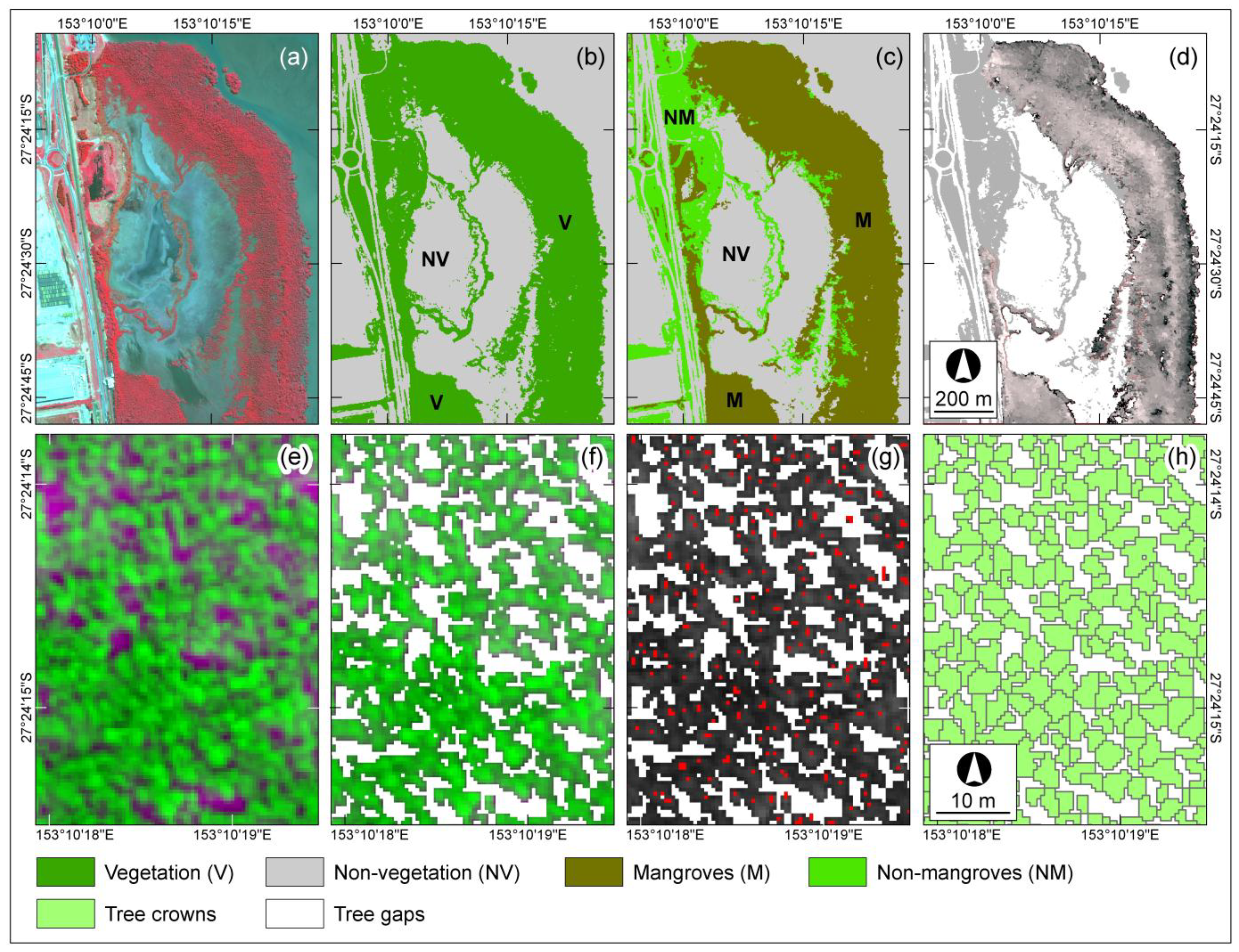
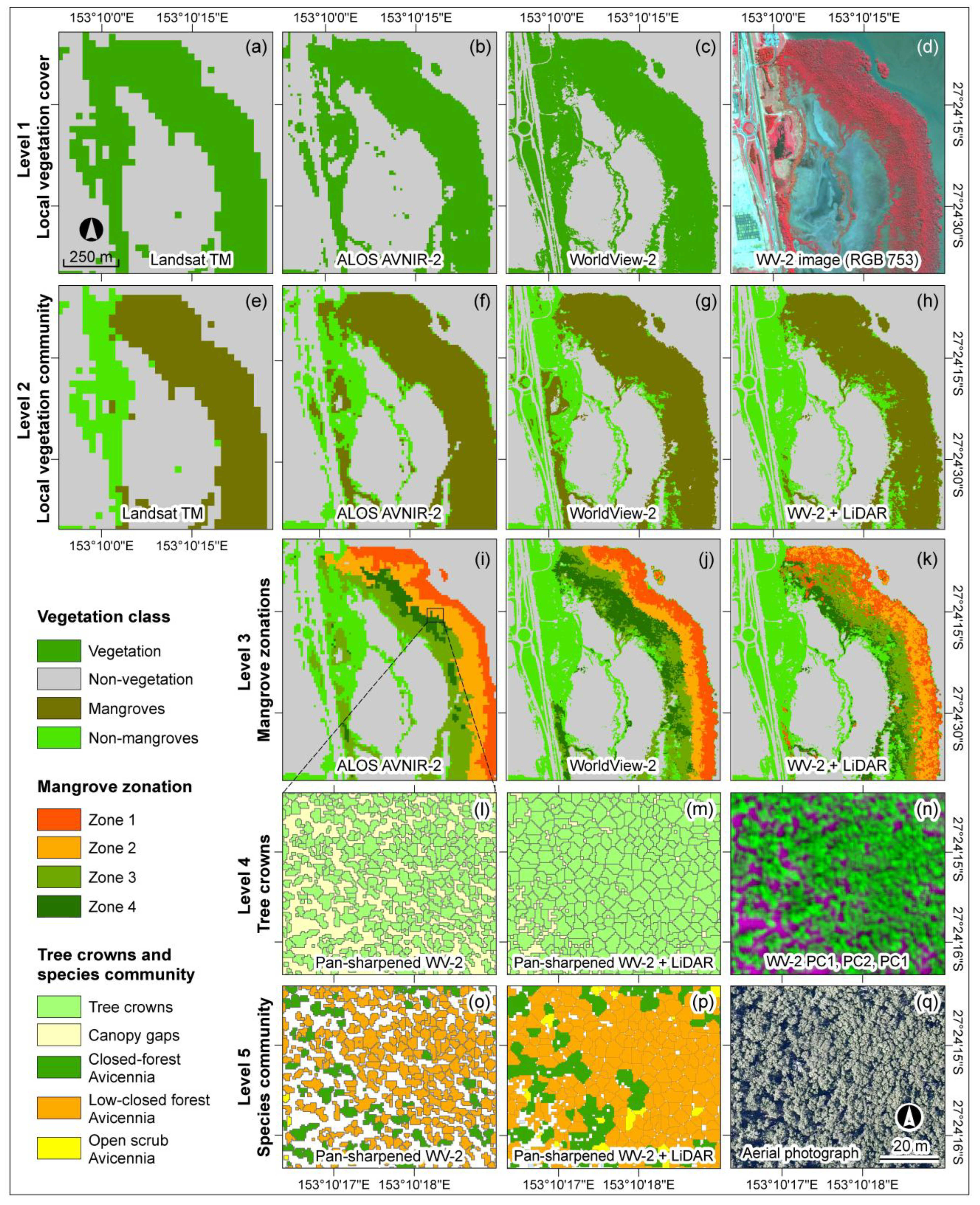
3.2. Mangrove Composition Maps

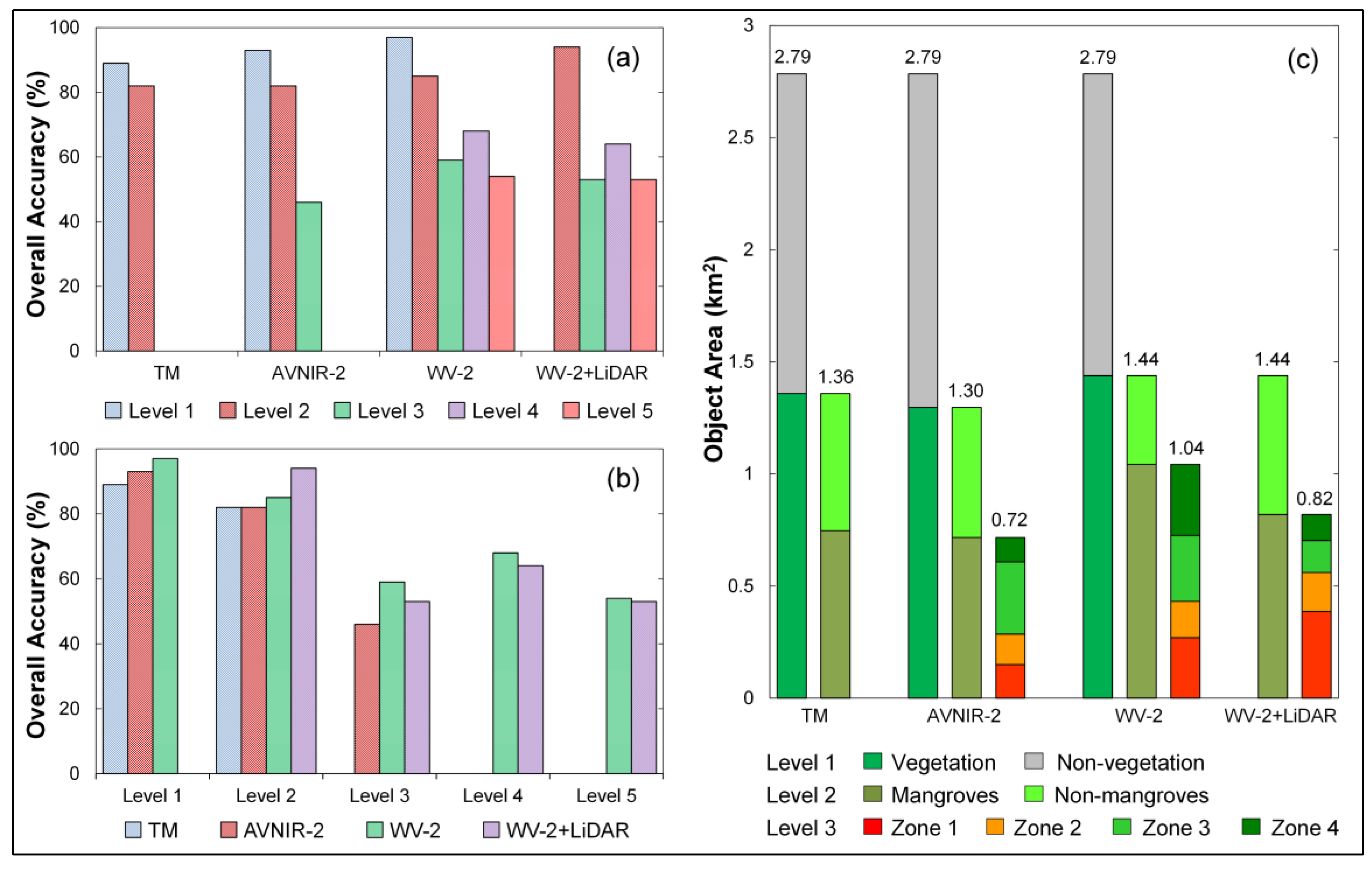
3.3. Accuracies, Errors and Uncertainties of the Maps
| Level | Class | Landsat TM | ALOS AVNIR-2 | WorldView-2 | WV2 + LiDAR | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| OQ | PA | UA | OA | OQ | PA | UA | OA | OQ | PA | UA | OA | OQ | PA | UA | OA | ||
| 1 | Vegetation | 85 | 92 | 92 | 89 | 90 | 93 | 97 | 93 | 95 | 99 | 97 | 97 | ||||
| Non-vegetation | 70 | 82 | 83 | 81 | 94 | 86 | 90 | 92 | 97 | ||||||||
| 2 | Mangroves | 74 | 79 | 92 | 82 | 76 | 81 | 93 | 82 | 80 | 94 | 84 | 85 | 91 | 99 | 99 | 94 |
| Non-mangroves | 66 | 88 | 72 | 66 | 85 | 75 | 63 | 69 | 88 | 87 | 98 | 97 | |||||
| 3 | Zone 1 | - | - | - | - | 55 | 57 | 92 | 46 | 72 | 75 | 96 | 53 | 72 | 75 | 95 | 59 |
| Zone 2 | - | - | - | - | 59 | 59 | 100 | 45 | 45 | 98 | 60 | 61 | 96 | ||||
| Zone 3 | - | - | - | - | 38 | 38 | 99 | 49 | 50 | 97 | 39 | 39 | 99 | ||||
| Zone 4 | - | - | - | - | 34 | 34 | 100 | 44 | 44 | 99 | 68 | 68 | 99 | ||||
| 4 | PS WV-2 | PS WV-2 + LiDAR | |||||||||||||||
| Tree crowns | - | - | - | - | - | - | - | - | 64 | 81 | 76 | 68 | 56 | 64 | 82 | 64 | |
| Canopy gaps | - | - | - | - | - | - | - | - | 34 | 65 | 41 | 24 | 36 | 42 | |||
| 5 | Avicennia (CF) | - | - | - | - | - | - | - | - | 65 | 82 | 75 | 54 | 57 | 87 | 62 | 53 |
| Avicennia (LCF) | - | - | - | - | - | - | - | - | 58 | 87 | 64 | 65 | 77 | 81 | |||
| Avicennia (OS) | - | - | - | - | - | - | - | - | 22 | 23 | 94 | 4 | 4 | 20 | |||
3.4. Multi-Scale Mangrove Composition Mapping

3.5. Applicability of the Approach to Other Sites
4. Conclusions and Future Research
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Giri, C.; Pengra, B.; Zhu, Z.; Singh, A.; Tieszen, L.L. Monitoring mangrove forest dynamics of the Sundarbans in Bangladesh and India using multi-temporal satellite data from 1973 to 2000. Estuar. Coast. Shelf Sci. 2007, 73, 91–100. [Google Scholar] [CrossRef]
- Green, E.P.; Mumby, P.J.; Edwards, A.J.; Clark, C.D.; Ellis, A.C. The assessment of mangrove areas using high resolution multispectral airborne imagery. J. Coast. Res. 1998, 14, 433–443. [Google Scholar]
- Green, E.P.; Clark, C.D.; Mumby, P.J.; Edwards, A.J.; Ellis, A.C. Remote sensing techniques for mangrove mapping. Int. J. Remote Sens. 1998, 19, 935–956. [Google Scholar] [CrossRef]
- Davis, B.A.; Jensen, J.R. Remote sensing of mangrove biophysical characteristics. Geocarto Int. 1998, 13, 55–64. [Google Scholar] [CrossRef]
- Hardisky, M.A.; Gross, M.F.; Klemas, V. Remote sensing of coastal wetlands. BioScience 1986, 36, 453–460. [Google Scholar] [CrossRef]
- Malthus, T.J.; Mumby, P.J. Remote sensing of the coastal zone: An overview and priorities for future research. Int. J. Remote Sens. 2003, 24, 2805–2815. [Google Scholar] [CrossRef]
- Giri, C.; Ochieng, E.; Tieszen, L.L.; Zhu, Z.; Singh, A.; Loveland, T.; Masek, J.; Duke, N. Status and distribution of mangrove forests of the world using earth observation satellite data. Glob. Ecol. Biogeogr. 2011, 20, 154–159. [Google Scholar] [CrossRef]
- Bhattarai, B.; Giri, C. Assessment of mangrove forests in the Pacific region using Landsat imagery. J. Appl. Remote Sens. 2011, 5, 053509–053511. [Google Scholar] [CrossRef]
- Kamal, M.; Phinn, S.R. Hyperspectral data for mangrove species mapping: A comparison of pixel-based and object-based approach. Remote Sens. 2011, 3, 2222–2242. [Google Scholar] [CrossRef]
- Wang, L.; Sousa, W.P.; Gong, P.; Biging, G.S. Comparison of IKONOS and QuickBird images for mapping mangrove species on the Caribbean coast of Panama. Remote Sens. Environ. 2004, 91, 432–440. [Google Scholar] [CrossRef]
- Koedsin, W.; Vaiphasa, C. Discrimination of tropical mangroves at the species level with EO-1 Hyperion data. Remote Sens. 2013, 5, 3562–3582. [Google Scholar] [CrossRef]
- Heenkenda, M.; Joyce, K.; Maier, S.; Bartolo, R. Mangrove species identification: Comparing WorldView-2 with aerial photographs. Remote Sens. 2014, 6, 6064–6088. [Google Scholar] [CrossRef]
- Heumann, B.W. Satellite remote sensing of mangrove forests: Recent advances and future opportunities. Progress Phys. Geogr. 2011, 35, 87–108. [Google Scholar] [CrossRef]
- Kuenzer, C.; Bluemel, A.; Gebhardt, S.; Quoc, T.V.; Dech, S. Remote sensing of mangrove ecosystems: A review. Remote Sens. 2011, 3, 878–928. [Google Scholar] [CrossRef]
- Held, A.; Ticehurst, C.; Lymburner, L.; Williams, N. High resolution mapping of tropical mangrove ecosystems using hyperspectral and radar remote sensing. Int. J. Remote Sens. 2003, 24, 2739–2759. [Google Scholar] [CrossRef]
- Krause, G.; Bock, M.; Weiers, S.; Braun, G. Mapping land-cover and mangrove structures with remote sensing techniques: A contribution to a synoptic GIS in support of coastal management in North Brazil. Environ. Manag. 2004, 34, 429–440. [Google Scholar] [CrossRef]
- Wiens, J.A. Spatial scaling in ecology. Funct. Ecol. 1989, 3, 385–397. [Google Scholar] [CrossRef]
- Marceau, D.J.; Hay, G.J. Remote sensing contributions to the scale issue. Can. J. Remote Sens. 1999, 25, 357–366. [Google Scholar] [CrossRef]
- Schaeffer-Novelli, Y.; Cintrón-Molero, G.; Cunha-Lignon, M.; Coelho, C., Jr. A conceptual hierarchical framework for marine coastal management and conservation: A “Janus-like” approach. J. Coast. Res. 2005, 42, 191–197. [Google Scholar]
- Farnsworth, E.J. Issues of spatial, taxonomic and temporal scale in delineating links between mangrove diversity and ecosystem function. Glob. Ecol. Biogeogr. Lett. 1998, 7, 15–25. [Google Scholar] [CrossRef]
- Twilley, R.R.; Rivera-Monroy, V.H.; Chen, R.; Botero, L. Adapting an ecological mangrove model to simulate trajectories in restoration ecology. Marine Pollut. Bull. 1999, 37, 404–419. [Google Scholar] [CrossRef]
- Duke, N.C.; Ball, M.C.; Ellison, J.C. Factors influencing biodiversity and distributional gradients in mangroves. Glob. Ecol. Biogeogr. Lett. 1998, 7, 27–47. [Google Scholar] [CrossRef]
- Feller, I.C.; Lovelock, C.E.; Berger, U.; McKee, K.L.; Joye, S.B.; Ball, M.C. Biocomplexity in mangrove ecosystems. Ann. Rev. Marine Sci. 2010, 2, 395–417. [Google Scholar] [CrossRef]
- Burnett, C.; Blaschke, T. A multi-scale segmentation/object relationship modelling methodology for landscape analysis. Ecol. Model. 2003, 168, 233–249. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Queiroz Feitosa, R.; van der Meer, F.; van der Werff, H.; van Coillie, F.; et al. Geographic object-based image analysis—Towards a new paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed]
- Blaschke, T. Multiscale image analysis for ecological monitoring of heterogeneous, small structured landscapes. Proc. SPIE 2002, 4545, 35–44. [Google Scholar]
- Woodcock, C.E.; Strahler, A.H. The factor of scale in remote sensing. Remote Sens. Environ. 1987, 21, 311–332. [Google Scholar] [CrossRef]
- Woodcock, C.; Harward, V.J. Nested-hierarchical scene models and image segmentation. Int. J. Remote Sens. 1992, 13, 3167–3187. [Google Scholar] [CrossRef]
- Berger, U.; Rivera-Monroy, V.H.; Doyle, T.W.; Dahdouh-Guebas, F.; Duke, N.C.; Fontalvo-Herazo, M.L.; Hildenbrandt, H.; Koedam, N.; Mehlig, U.; Piou, C.; et al. Advances and limitations of individual-based models to analyze and predict dynamics of mangrove forests: A review. Aquat. Bot. 2008, 89, 260–274. [Google Scholar] [CrossRef]
- Kamal, M.; Phinn, S.; Johansen, K. Characterizing the spatial structure of mangrove features for optimizing image-based mangrove mapping. Remote Sens. 2014, 6, 984–1006. [Google Scholar] [CrossRef]
- Blaschke, T.; Strobl, J. What’s wrong with pixels? Some recent development interfacing remote sensing and GIS. GeoBIT/GIS 2001, 6, 12–17. [Google Scholar]
- Müller, F. State-of-the-art in ecosystem theory. Ecol. Model. 1997, 100, 135–161. [Google Scholar] [CrossRef]
- Castilla, G.; Hay, G.J. Image objects and geographic objects. In Object-Based Image Analysis: Spatial Concepts for Knowledge-Driven Remote Sensing Applications; Blaschke, T., Lang, S., Hay, G.J., Eds.; Springer-Verlag: Berlin, Germany, 2008; pp. 93–112. [Google Scholar]
- Gamanya, R.; de Maeyer, P.; de Dapper, M. An automated satellite image classification design using object-oriented segmentation algorithms: A move towards standardization. Expert Syst. Appl. 2007, 32, 616–624. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Hay, G.J.; Castilla, G.; Wulder, M.A.; Ruiz, J.R. An automated object-based approach for the multiscale image segmentation of forest scenes. Int. J. Appl. Earth Obs. Geoinf. 2005, 7, 339–359. [Google Scholar] [CrossRef]
- Johansen, K.; Phinn, S.; Witte, C.; Philip, S.; Newton, L. Mapping banana plantations from object-oriented classification of SPOT-5 imagery. Photogramm. Eng. Remote Sens. 2009, 75, 1069–1081. [Google Scholar] [CrossRef]
- Environment Australia. A Directory of Important Wetlands in Australia, 3rd ed.; Environment Australia: Canberra, Australia, 2001; p. 157. [Google Scholar]
- Dowling, R.M.; Stephen, K. Coastal Wetlands of South-Eastern Queensland Maroochy Shire to New South Wales Border; Queensland Herbarium, Environmental Protection Agency: Brisbane, Australia, 2001; p. 220. [Google Scholar]
- Duke, N. Australia’s Mangroves: The Authoritative Guide to Australia’s Mangrove Plants; University of Queensland: Brisbane, Australia, 2006; p. 200. [Google Scholar]
- Balai Taman Nasional Karimunjawa (BTNK). terpretasi Trekking Mangrove Taman Nasional Karimunjawa; Balai Taman Nasional Karimunjawa: Semarang, Indonesia, 2011; p. 24. [Google Scholar]
- LAADS Level 1 and Atmosphere Archive and Distribution System. Website of NASA—Goddard Space Flight Center. Available online: http://ladsweb.nascom.nasa.gov/data/search.html (accessed on 5 March 2012).
- Laben, C.A.; Brower, B.V. Process for Enhancing the Spatial Resolution of Multispectral Imagery Using Pan-Sharpening. US6011875 A, 4 January 2000. [Google Scholar]
- Specht, R.L.; Specht, A.; Whelan, M.B.; Hegarty, E.E. Conservation Atlas of Plant Communities in Australia; Southern Cross University Press: Lismore, Australia, 1995; p. 910. [Google Scholar]
- Kitamura, S.; Anwar, C.; Chaniago, A.; Baba, S. Handbook of Mangroves in Indonesia: Bali & Lombok; International Society of mangrove Ecosystem (ISME): Okinawa, Japan, 2004. [Google Scholar]
- Woodcock, C.E.; Strahler, A.H.; Jupp, D.L.B. The use of variograms in remote sensing: I. Scene models and simulated images. Remote Sens. Environ. 1988, 25, 323–348. [Google Scholar] [CrossRef]
- Curran, P.J.; Atkinson, P.M. Geostatistics and remote sensing. Progress Phys. Geogr. 1998, 22, 61–78. [Google Scholar] [CrossRef]
- Cohen, W.B.; Spies, T.A.; Bradshaw, G.A. Semivariograms of digital imagery for analysis of conifer canopy structure. Remote Sens. Environ. 1990, 34, 167–178. [Google Scholar] [CrossRef]
- Johansen, K.; Phinn, S. Linking riparian vegetation spatial structure in Australian tropical savannas to ecosystem health indicators: Semi-variogram analysis of high spatial resolution satellite imagery. Can. J. Remote Sens. 2006, 32, 228–243. [Google Scholar] [CrossRef]
- de Jong, S.M.; van der Meer, F.D. Remote Sensing Image Analysis: Including the Spatial Domain; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2005; p. 359. [Google Scholar]
- Hay, G.J.; Blaschke, T.; Marceau, D.J.; Bouchard, A. A comparison of three image-object methods for the multiscale analysis of landscape structure. ISPRS J. Photogramm. Remote Sens. 2003, 57, 327–345. [Google Scholar] [CrossRef]
- Trimble. eCognition Developer 8.7 User Guide; TrimbleGermany GmbH: Munchen, Germany, 2011; p. 258. [Google Scholar]
- Baatz, M.; Schäpe, A. Object-oriented and multi-scale image analysis in semantic networks. In Proceedings of 2nd International Symposium on Operationalization of Remote Sensing, ITC, The Netherland, 16–20 August 1999.
- Wu, J. Hierarchy and scaling: Extrapolating information along a scaling ladder. Can. J. Remote Sens. 1999, 25, 367–380. [Google Scholar] [CrossRef]
- Bunting, P.; Lucas, R. The delineation of tree crowns in Australian mixed species forests using hyperspectral Compact Airborne Spectrographic Imager (CASI) data. Remote Sens. Environ. 2006, 101, 230–248. [Google Scholar] [CrossRef]
- Lucas, R.M.; Mitchell, A.L.; Rosenqvist, A.; Proisy, C.; Melius, A.; Ticehurst, C. The potential of L-band SAR for quantifying mangrove characteristics and change: Case studies from the tropics. Aquat. Conserv. 2007, 17, 245–264. [Google Scholar] [CrossRef]
- Gougeon, F.A. A crown-following approach to the automatic delineation of individual tree crowns in high spatial resolution aerial images. Can. J. Remote Sens. 1995, 21, 274–284. [Google Scholar] [CrossRef]
- Culvenor, D.S. TIDA: An algorithm for the delineation of tree crowns in high spatial resolution remotely sensed imagery. Comput. Geosci. 2002, 28, 33–44. [Google Scholar] [CrossRef]
- Culvenor, D.S. Extracting individual tree information: A survey of techniques for high spatial resolution imagery. In Remote Sensing of Forest Environments: Concepts and Case Studies; Wulder, M.A., Franklin, S.E., Eds.; Kluwer Academic Publishers: Boston, MA, USA, 2003; pp. 255–277. [Google Scholar]
- Gougeon, F.A.; Leckie, D.G. The individual tree crown approach applied to IKONOS images of a coniferous plantation area. Photogramm. Eng. Remote Sens. 2006, 72, 1287–1297. [Google Scholar] [CrossRef]
- Schopfer, E.; Lang, S. Object fate analysis—A virtual overlay method for the categorisation of object transition and object-based accuracy assessment. In Proceedings of 1st International Conference on Object-based Image Analysis (OBIA 2006), Salzburg, Austria, 4–5 July 2006.
- Zhan, Q.; Molenaar, M.; Tempfli, K.; Shi, W. Quality assessment for geo-spatial objects derived from remotely sensed data. Int. J. Remote Sens. 2005, 26, 2953–2974. [Google Scholar] [CrossRef]
- Whiteside, T.; Boggs, G.; Maier, S. Area-based validity assessment of single- and multi-class object-based image analysis. In Proceedings of 15th Australasian Remote Sensing and Photogrammetry Conference, Alice Spring, Australia, 13–17 September 2010.
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Dowling, R.; Stephens, K. Coastal Wetlands of South East Queensland: Volume 1 Mapping and Survey; Queensland Herbarium: Brisbane, Australia, 1998. [Google Scholar]
- Jupp, D.L.B.; Strahler, A.H.; Woodcock, C.E. Autocorrelation and regularization in digital images. II. Simple image models. IEEE Trans. Geosci. Remote Sens. 1989, 27, 247–258. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Strahler, A.H.; Jupp, D.L.B. The use of variograms in remote sensing: II. Real digital images. Remote Sens. Environ. 1988, 25, 349–379. [Google Scholar] [CrossRef]
- Curran, P.J. The semivariogram in remote sensing: An introduction. Remote Sens. Environ. 1988, 24, 493–507. [Google Scholar] [CrossRef]
- Murray, M.R.; Zisman, S.A.; Furley, P.A.; Munro, D.M.; Gibson, J.; Ratter, J.; Bridgewater, S.; Minty, C.D.; Place, C.J. The mangroves of Belize: Part 1. distribution, composition and classification. Forest Ecol. Manag. 2003, 174, 265–279. [Google Scholar] [CrossRef]
- Carter, G.A. Ratios of leaf reflectances in narrow wavebands as indicators of plant stress. Int. J. Remote Sens. 1994, 15, 697–703. [Google Scholar] [CrossRef]
- Blasco, F.; Gauquelin, T.; Rasolofoharinoro, M.; Denis, J.; Aizpuru, M.; Caldairou, V. Recent advances in mangrove studies using remote sensing data. Mar. Freshwater Res. 1998, 49, 287–296. [Google Scholar] [CrossRef]
- Díaz, B.M.; Blackburn, G.A. Remote sensing of mangrove biophysical properties: Evidence from a laboratory simulation of the possible effects of background variation on spectral vegetation indices. Int. J. Remote Sens. 2003, 24, 53–73. [Google Scholar] [CrossRef]
- Heumann, B.W. An object-based classification of mangroves using a hybrid decision tree—Support Vector Machine approach. Remote Sens. 2011, 3, 2440–2460. [Google Scholar] [CrossRef]
- Strahler, A.H.; Woodcock, C.E.; Smith, J.A. On the nature of models in remote sensing. Remote Sens. Environ. 1986, 20, 121–139. [Google Scholar] [CrossRef]
- Rocchini, D. Effects of spatial and spectral resolution in estimating ecosystem α-diversity by satellite imagery. Remote Sens. Environ. 2007, 111, 423–434. [Google Scholar] [CrossRef]
- Chusnie, J.L. The interactive effect of spatial resolution and degree of internal variability within land-cover types on classification accuracies. Int. J. Remote Sens. 1987, 8, 15–29. [Google Scholar] [CrossRef]
- Markham, B.L.; Townshend, J.R.G. Land cover classification accuracy as a function of sensor spatial resolution. In Proceedings of the 15th International Symposium on Remote Sensing of Environment, Ann Arbor, MI, USA, 11–15 May 1981.
- Andrefouet, S.; Kramer, P.; Torres-Pulliza, D.; Joyce, K.E.; Hochberg, E.J.; Garza-Pe´rez, R.; Mumby, P.J.; Riegl, B.; Yamano, H.; White, W.H.; et al. Multi-site evaluation of IKONOS data for classification of tropical coral reef environments. Remote Sens. Environ. 2003, 88, 128–143. [Google Scholar] [CrossRef]
- Roelfsema, C.M.; Phinn, S.R. Validation. In Coral Reef Remote Sensing; Goodman, J.A., Purkis, S.J., Phinn, S.R., Eds.; Springer: Dordrecht, The Netherlands, 2013; pp. 375–401. [Google Scholar]
- Atzberger, C. Object-based retrieval of biophysical canopy variables using artificial neural nets and radiative transfer models. Remote Sens. Environ. 2004, 93, 53–67. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamal, M.; Phinn, S.; Johansen, K. Object-Based Approach for Multi-Scale Mangrove Composition Mapping Using Multi-Resolution Image Datasets. Remote Sens. 2015, 7, 4753-4783. https://doi.org/10.3390/rs70404753
Kamal M, Phinn S, Johansen K. Object-Based Approach for Multi-Scale Mangrove Composition Mapping Using Multi-Resolution Image Datasets. Remote Sensing. 2015; 7(4):4753-4783. https://doi.org/10.3390/rs70404753
Chicago/Turabian StyleKamal, Muhammad, Stuart Phinn, and Kasper Johansen. 2015. "Object-Based Approach for Multi-Scale Mangrove Composition Mapping Using Multi-Resolution Image Datasets" Remote Sensing 7, no. 4: 4753-4783. https://doi.org/10.3390/rs70404753