
Spatio-Temporal Constrained Human Trajectory Generation from the PIR Motion Detector Sensor Network Data: A Geometric Algebra Approach


Abstract
:1. Introduction
2. Problems and Basic Ideas
2.1. GA and GA Representation of PIR Sensor Networks


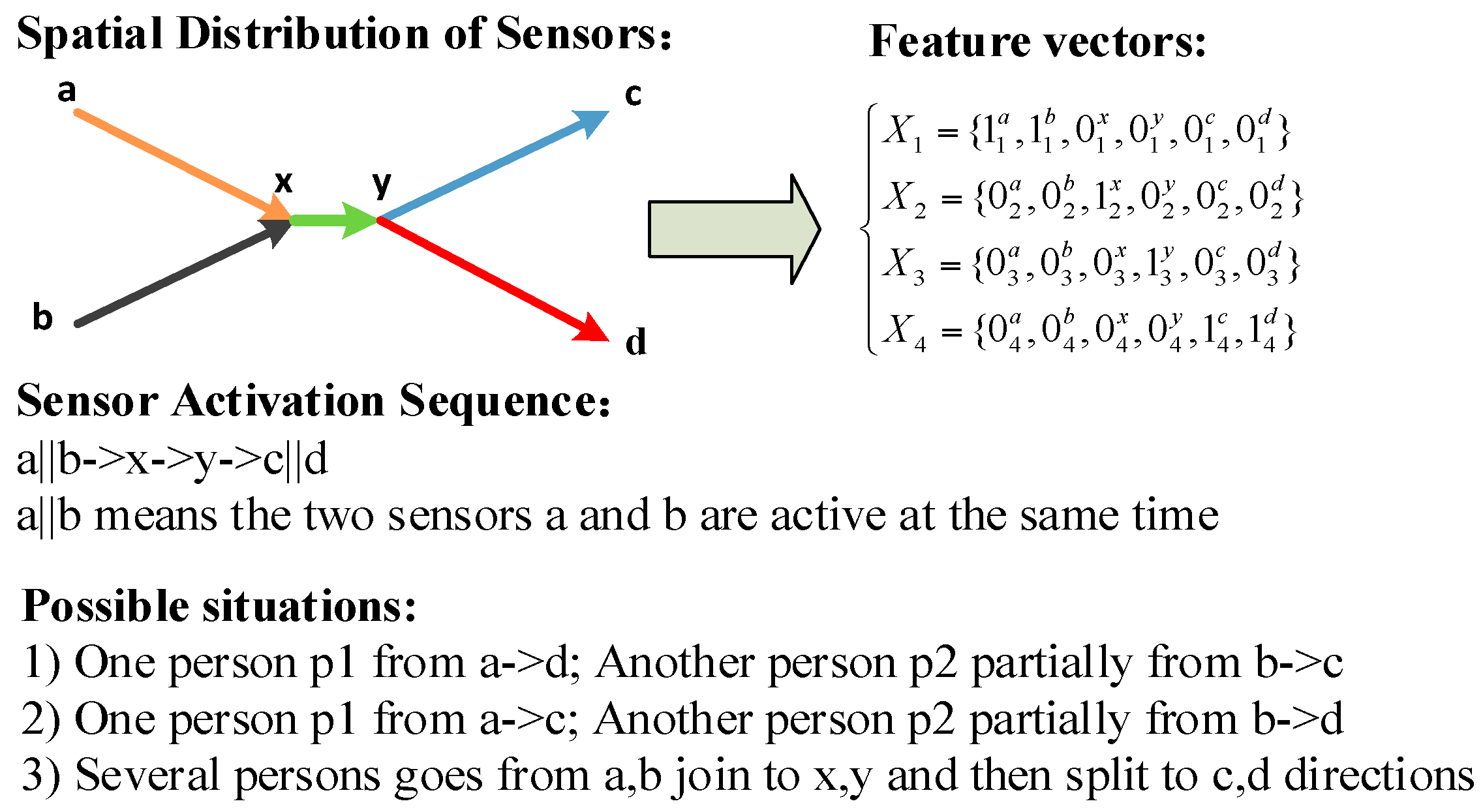
2.2. The Problems of Trajectory Generation from PIR Sensor Networks

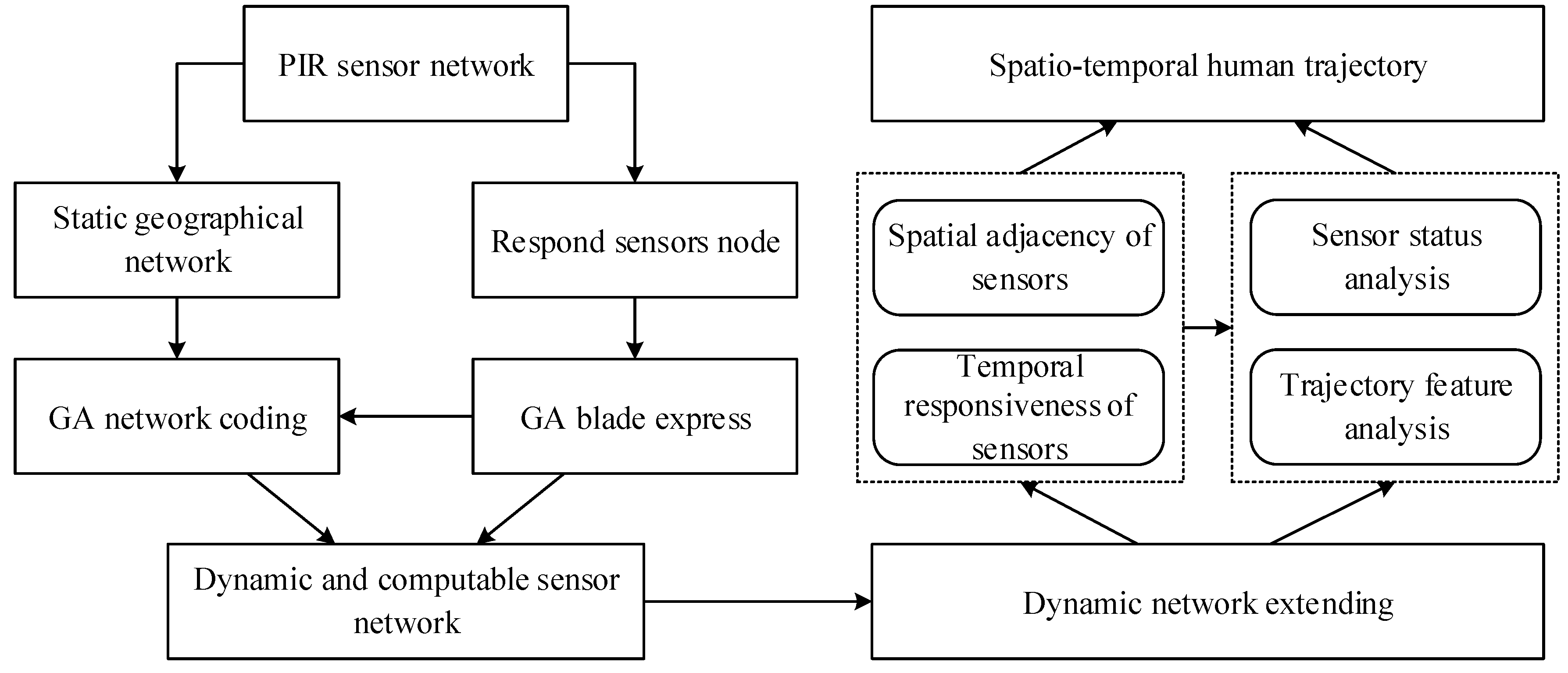
2.3. Basic Ideas

3. Methods
3.1. Classification of Sensor Status According to the Trajectory

3.2. The Generation of All Possible Trajectories
3.3. Possible Trajectories Generation and Refinement Algorithm

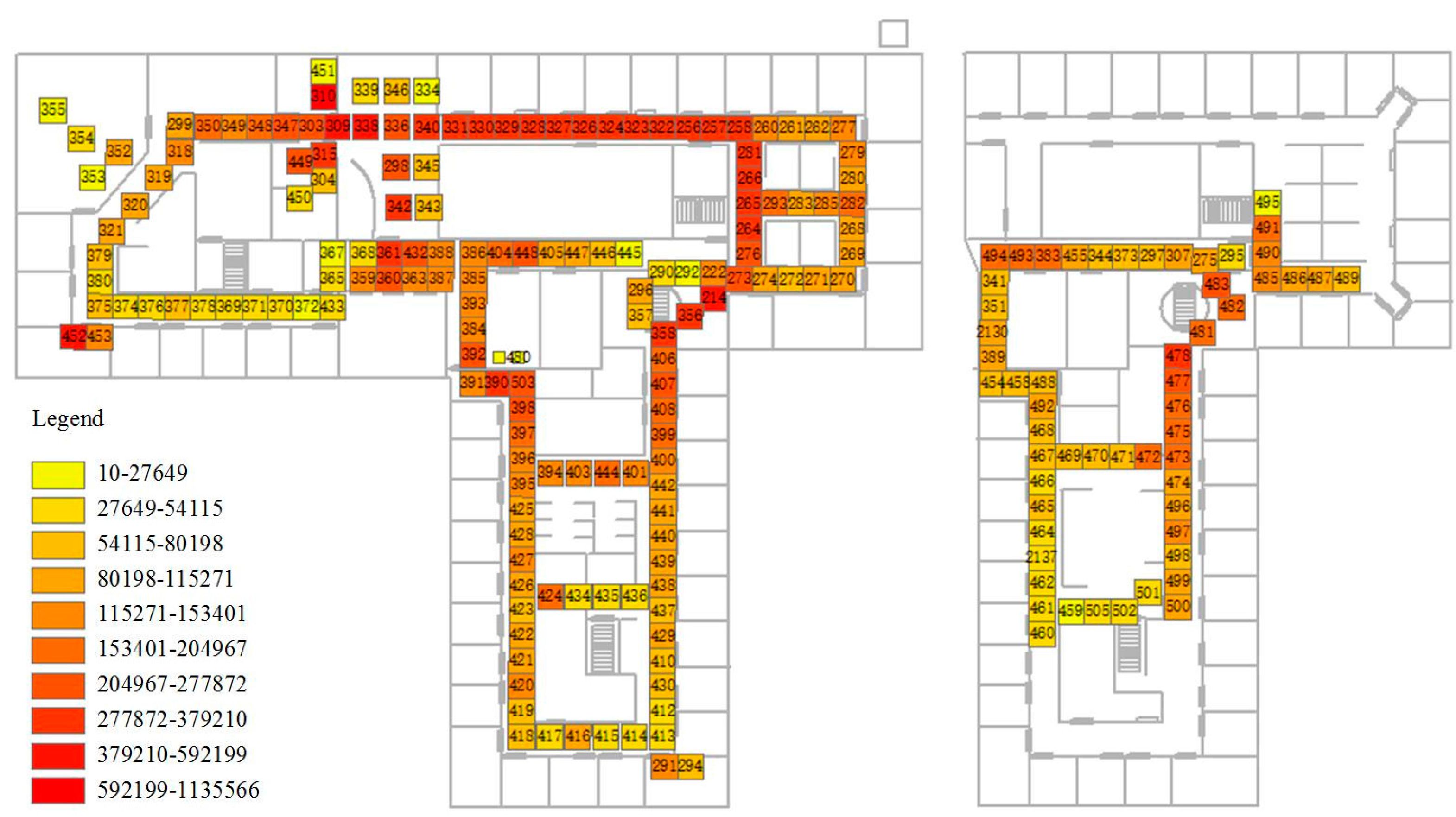
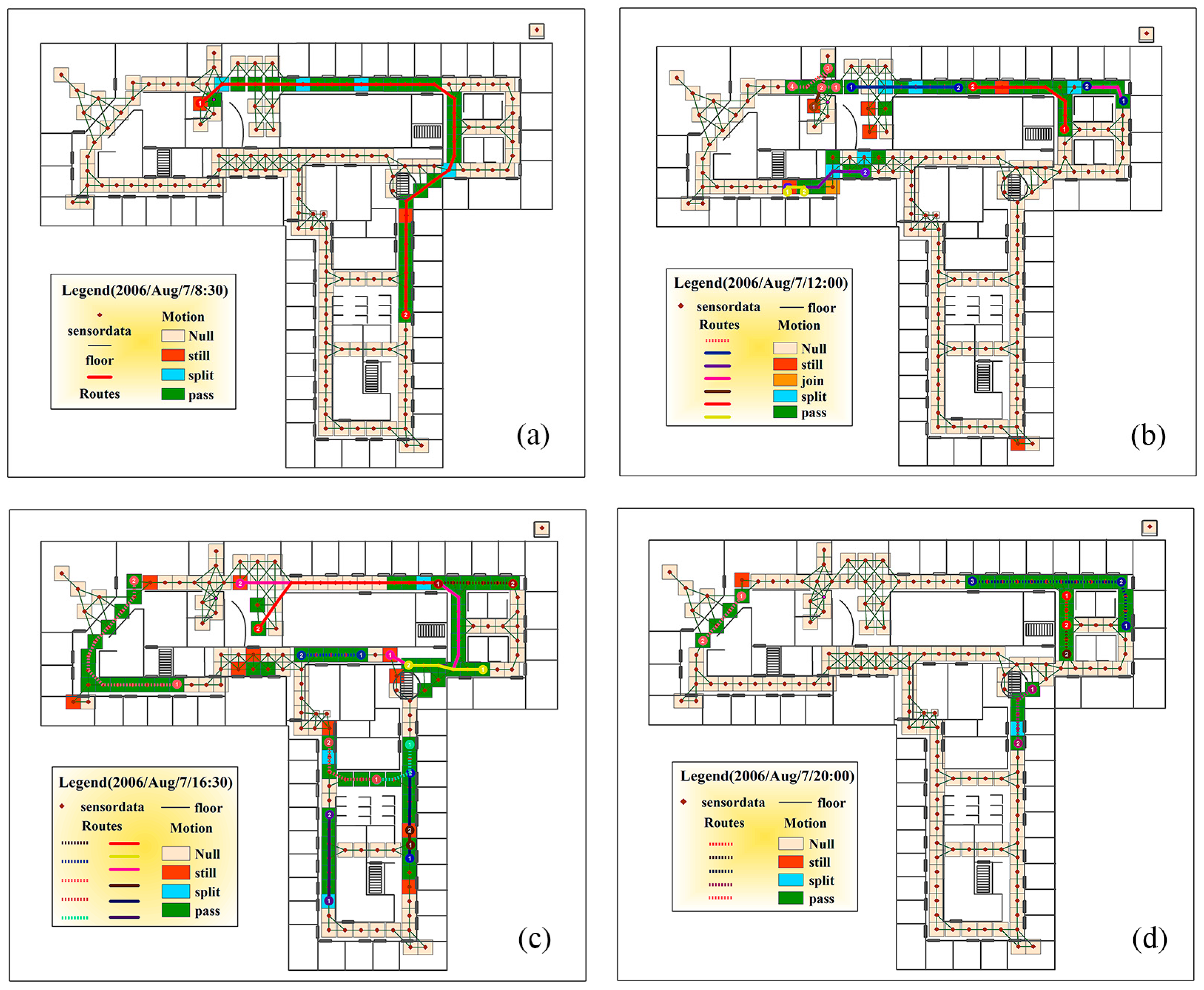
4. Case Studies


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Range (End Time) | No. of Sensor Logs | Time Cost of Sensor Status(s) * | Memory Cost of Sensor Status(MB) | Time Cost of Trajectory Generation(s) * | Memory Cost of Trajectory Generation (MB) |
|---|---|---|---|---|---|
| 2006/August/7 16:10 | 53517 | 1014.89 | 200.11 | 47.12 | 312.31 |
| 2006/August/8 07:19 | 77031 | 1314.89 | 213.82 | 67.96 | 450.15 |
| 2006/August/8 20:00 | 152031 | 2919.82 | 420.32 | 134.37 | 888.07 |
| 2006/August/9 23:46 | 229309 | 3214.71 | 480.68 | 202.67 | 1338.53 |
| 2006/August/12 10:30 | 315130 | 4231.27 | 510.24 | 277.59 | 1839.47 |
| 2006/August/12 23:05 | 414397 | 8919.82 | 718.48 | 365.85 | 2419.09 |
| 2006/August/13 23:59 | 414552 | 8992.71 | 729.14 | 365.26 | 2419.77 |

| Time | Start Node (Sensor ID) | End Node (Sensor ID) |
|---|---|---|
| 2006/August/7 12:00 | 309 | 348 |
| 2006/August/7 16:30 | 408 | 444 |
| 444 | 398 | |
| 371 | 299 | |
| 405 | 386 | |
| 256 | 277 | |
| 2006/August/7 20:00 | 265 | 276 |
| 318 | 321 | |
| 356 | 408 | |
| 282 | 326 | |
| 281 | 265 |


5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhu, L.; Wong, K.H. Human Tracking and counting using the KINECT range sensor based on adaboost and kalman filter. In Advances in Visual Computing; Bebis, G., Boyle, R., Parvin, B., Koracin, D., Li, B., Porikli, F., Zordan, V., Klosowski, J., Coquillart, S., Luo, X., et al., Eds.; Springer: Berlin, Germany, 2013; pp. 582–591. [Google Scholar]
- Fahad, L.G.; Khan, A.; Rajarajan, M. Activity recognition in smart homes with self verification of assignments. Neurocomputing 2015, 149, 1286–1298. [Google Scholar] [CrossRef]
- Yin, J.Q.; Tian, G.H.; Feng, Z.Q.; Li, J.P. Human activity recognition based on multiple order temporal information. Comput. Electr. Eng. 2014, 40, 1538–1551. [Google Scholar] [CrossRef]
- Howard, J.; Hoff, W. Forecasting building occupancy using sensor network data. In Proceedings of the 2nd International Workshop on Big Data, Streams and Heterogeneous Source Mining: Algorithms, Systems, Programming Models and Applications, Chicago, IL, USA, 11 Auguest 2013; pp. 87–94.
- Liu, T.; Chi, T.; Li, H.; Rui, X.; Lin, H. A GIS-oriented location model for supporting indoor evacuation. Int. J. Geogr. Inf. Sci. 2014, 29, 305–326. [Google Scholar] [CrossRef]
- Alexander, A.A.; Taylor, R.; Vairavanathan, V.; Fu, Y.; Hossain, E.; Noghanian, S. Solar-powered ZigBee-based wireless motion surveillance: A prototype development and experimental results. Wirel. Commun. Mob. Comput. 2008, 8, 1255–1276. [Google Scholar] [CrossRef]
- Creusere, C.D.; Mecimore, I. Bitstream-based overlap analysis for multi-view distributed video coding. In Proceeding of the IEEE Southwest Symposium on Image Analysis and Interpretation, Santa Fe, NM, USA, 24–26 March 2008; pp. 93–96.
- Wren, C.R.; Ivanov, Y.A.; Leigh, D.; Westhues, J. The MERL motion detector dataset. In Proceedings of the 2007 Workshop on Massive Datasets, Nagoya, Japan, 12 November 2007; pp. 10–14.
- Gong, N.W.; Laibowitz, M.; Paradiso, J.A. Dynamic privacy management in pervasive sensor networks. In Ambient Intelligence; de Ruyter, B., Wichert, R., Keyson, D.V., Markopoulos, P., Streitz, N., Divitini, M., Georgantas, N., Gomez, A.M., Eds.; Springer: Berlin, Germany, 2010; pp. 96–106. [Google Scholar]
- Wren, C.R.; Tapia, E.M. Toward scalable activity recognition for sensor networks. In Location- and Context-Awareness; Hazas, M., Krumm, J., Strang, T., Eds.; Springer: Berlin, Germany, 2006; pp. 168–185. [Google Scholar]
- Wong, K.B.Y.; Zhang, T.D.; Aghajan, H. Extracting patterns of behavior from a network of binary sensors. J. Ambient. Intell. Humaniz. Comput. 2015, 6, 83–105. [Google Scholar] [CrossRef]
- Connolly, C.I.; Burns, J.B.; Bui, H.H. Sampling stable properties of massive track datasets. In Proceedings of the 2007 Workshop on Massive Datasets, Nagoya, Japan, 12 November 2007; pp. 2–4.
- Magnusson, M.S. Discovering hidden time patterns in behavior: T-patterns and their detection. Behav. Res. Meth. Instrum. Comput. 2000, 32, 93–110. [Google Scholar] [CrossRef]
- Salah, A.A.; Pauwels, E.; Tevenard, R.; Gevers, T. T-Patterns revisited: Mining for temporal patterns in sensor data. Sensors 2010, 10, 7496–7513. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Connolly, C.I.; Burns, J.B.; Bui, H.H. Recovering social networks from massive track datasets. In Proceedings of the 2008 IEEE Workshop on Applications of Computer Vision (WACV), Copper Mountain, CO, USA, 7–9 January 2008; pp. 1–8.
- Salah, A.A.; Lepri, B.; Pianesi, F.; Pentland, A.S. Human behavior understanding for inducing behavioral change: application perspectives. In Human Behavior Unterstanding; Salah, A.A., Lepri, B., Eds.; Springer: Berlin, Germany, 2011; pp. 1–15. [Google Scholar]
- Ivanov, Y.; Sorokin, A.; Wren, C.; Kaur, I. Tracking people in mixed modality systems. In Proceedings of the SPIE Electronic Imaging 2007, San Jose, CA, USA, 28 January 2007; pp. 65080L-1–65080L-11.
- Anker, T.; Dolev, D.; Hod, B. Belief propagation in wireless sensor networks—A practical approach. In Wireless Algorithms, Systems, and Applications; Li, Y., Huynh, D.T., Das, S.K., Du, D.Z., Eds.; Springer: Berlin, Germany, 2008; pp. 466–479. [Google Scholar]
- Wren, C.R.; Ivanov, Y.A. Ambient intelligence as the bridge to the future of pervasive computing. In Proceedings of the 8th IEEE Int’l Conference on Automatic Face and Gesture Recognition, Amsterdam, The Netherlands, 17–19 September 2008; pp. 1–6.
- Ivanov, Y.A.; Wren, C.R.; Sorokin, A.; Kaur, I. Visualizing the history of living spaces. IEEE Trans. Visual. Comput. Graph. 2007, 13, 1153–1160. [Google Scholar] [CrossRef]
- Cerveri, P.; Pedotti, A.; Ferrigno, G. Robust recovery of human motion from video using kalman filters and virtual humans. Human Move. Sci. 2003, 22, 377–404. [Google Scholar] [CrossRef]
- Castanedo, F.; de-Ipiña, D.L.; Aghajan, H.K.; Kleihorst, R. Learning routines over long-term sensor data using topic models. Expert Syst. 2014, 31, 365–377. [Google Scholar] [CrossRef]
- Friedler, S.A.; Mount, D.M. Spatio-temporal range searching over compressed kinetic sensor data. In Algorithms—ESA 2010; de Berg, M., Meyer, U., Eds.; Springer: Berlin, Germany, 2010; pp. 386–397. [Google Scholar]
- Yuan, L.; Yu, Z.; Luo, W.; Zhang, J.; Hu, Y. Clifford algebra method for network expression, computation, and algorithm construction. Math. Meth. Appl. Sci. 2014, 37, 1428–1435. [Google Scholar] [CrossRef]
- Yuan, L.; Yu, Z.; Luo, W.; Yi, L.; Lü, G. Geometric algebra for multidimension-unified geographical information system. Adv. Appl. Clifford Algebras 2013, 23, 497–518. [Google Scholar] [CrossRef]
- Schott, R.; Staples, G.S. Generalized Zeon Algebras: Theory and application to multi-constrained path problems. Adv. Appl. Clifford Algebras 2015. [Google Scholar] [CrossRef]
- Wren, C.R.; Minnen, D.C.; Rao, S.G. Similarity-based analysis for large networks of ultra-low resolution sensors. Pattern Recognit. 2006, 39, 1918–1931. [Google Scholar] [CrossRef]
- Hitzer, E.; Nitta, T.; Kuroe, Y. Applications of clifford’s geometric algebra. Adv. Appl. Clifford Algebras 2013, 23, 377–404. [Google Scholar] [CrossRef]
- Schott, R.; Staples, G.S. Dynamic geometric graph processes: Adjacency operator Approach. Adv. Appl. Clifford Algebras 2010, 20, 893–921. [Google Scholar] [CrossRef]
- Schott, R.; Staples, G.S. Complexity of counting cycles using zeons. Comput. Math. Appl. 2011, 62, 1828–1837. [Google Scholar] [CrossRef]
- Nefzi, B.; Schott, R.; Song, Y.Q.; Staples, G.S.; Tsiontsiou, E. An operator calculus approach for multi-constrained routing in wireless sensor networks. In Proceedings of the 16th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Hangzhou, China, 22–25 June 2015; pp. 367–376.
- Elman, J.L. Finding structure in time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Hildenbrand, D. Foundations of Geometric Algebra Computing; Springer: Berlin, Germany, 2013. [Google Scholar]
- Hildenbrand, D. Geometric computing in computer graphics using conformal geometric algebra. Comput. Graph-UK 2005, 29, 795–803. [Google Scholar] [CrossRef]
- Cheng, C.; Song, X.; Zhou, C. Generic cumulative annular bucket histogram for spatial selectivity estimation of spatial database management system. Int. J. Geogr. Inf. Sci. 2013, 27, 339–362. [Google Scholar] [CrossRef]
- Yu, Z.; Yuan, L.W.; Lv, G.N.; Luo, W.; Xie, Z.-R. Coupling characteristics of zonal and meridional sea level change and their response to different ENSO events. Chin. J. Geophys. 2011, 54, 1972–1982. [Google Scholar]
- Yuan, L.; Yu, Z.; Luo, W.; Hu, Y.; Feng, L.; Zhu, A.-X. A hierarchical tensor-based approach to compressing, updating and querying geospatial data. IEEE Trans. Knowl. Data Eng. 2015, 27, 312–325. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Yuan, L.; Luo, W.; Feng, L.; Lv, G. Spatio-Temporal Constrained Human Trajectory Generation from the PIR Motion Detector Sensor Network Data: A Geometric Algebra Approach. Sensors 2016, 16, 43. https://doi.org/10.3390/s16010043
Yu Z, Yuan L, Luo W, Feng L, Lv G. Spatio-Temporal Constrained Human Trajectory Generation from the PIR Motion Detector Sensor Network Data: A Geometric Algebra Approach. Sensors. 2016; 16(1):43. https://doi.org/10.3390/s16010043
Chicago/Turabian StyleYu, Zhaoyuan, Linwang Yuan, Wen Luo, Linyao Feng, and Guonian Lv. 2016. "Spatio-Temporal Constrained Human Trajectory Generation from the PIR Motion Detector Sensor Network Data: A Geometric Algebra Approach" Sensors 16, no. 1: 43. https://doi.org/10.3390/s16010043