1. Introduction
The operational principle of MEMS vibrating gyroscopes actually relies on the Coriolis effect with an energy transfer between two vibration modes [
1]. Typically, a micromachined gyroscope is a resonator with a drive-mode and a sense-mode. With the improvement in the performance specifications of MEMS gyroscopes such as the resolution, sensitivity, and bandwidth [
2,
3,
4,
5,
6], external vibrations can significantly influence the gyroscope’s sensitivity due to the high quality factor which ranges from a hundred or so at atmospheric pressure to hundreds of thousands under vacuum.
A dual-mass tuning fork gyro is a very common type of vibrating gyroscope used to cancel linear vibrations by using two identical tines, which operate in anti-phase mode [
7,
8,
9,
10]. The linear vibration is a common-mode vibration caused by random environment vibrations. Due to the inevitable structural imbalance, the linear vibration will cause output errors. To decrease the vibration output caused by fabrication defects, a large frequency separation between the in- and anti-phase modes is needed [
11,
12,
13]. However, these methods reduce the scale factor of TFGs. To resist the linear vibration without sacrificing the sensitivity and eliminate the lower frequency mode, an improved mode ordering by using different coupling mechanisms between two tines is necessary [
14,
15,
16]. Therefore, shifting the in-phase mode frequency above the anti-phase and increasing the frequency separation are important.
In our previous work [
16], we designed a dual-mass TFG with an anchored ring coupling mechanism and only numerically studied the linear vibration sensitivity of proposed TFGs due to the stiffness imbalance induced by the practical process imperfections. It was observed that linear vibration would induce output errors in the in- and anti-phase mode frequencies.
This paper proposes a new micromachined TFG with an anchored diamond coupling beam to analyze the mode ordering and the vibration sensitivity. For comparison with this novel structure, a traditional one with a direct diamond coupling beam was designed at the same time.
Section 2 describes the two kinds of structures in more detail. An analytical analysis on the response of the non-ideal TFG with anchored coupling is given in
Section 3. FEM simulations on the stiffness of different coupling styles and the comparisons with simulations and analytical solutions are presented in
Section 4. In
Section 5, possible methods to decrease the vibration sensitivity and their principles are discussed.
Section 6 gives our conclusions.
2. Architecture Design
Two kinds of TFGs are designed in this paper according to the previous work [
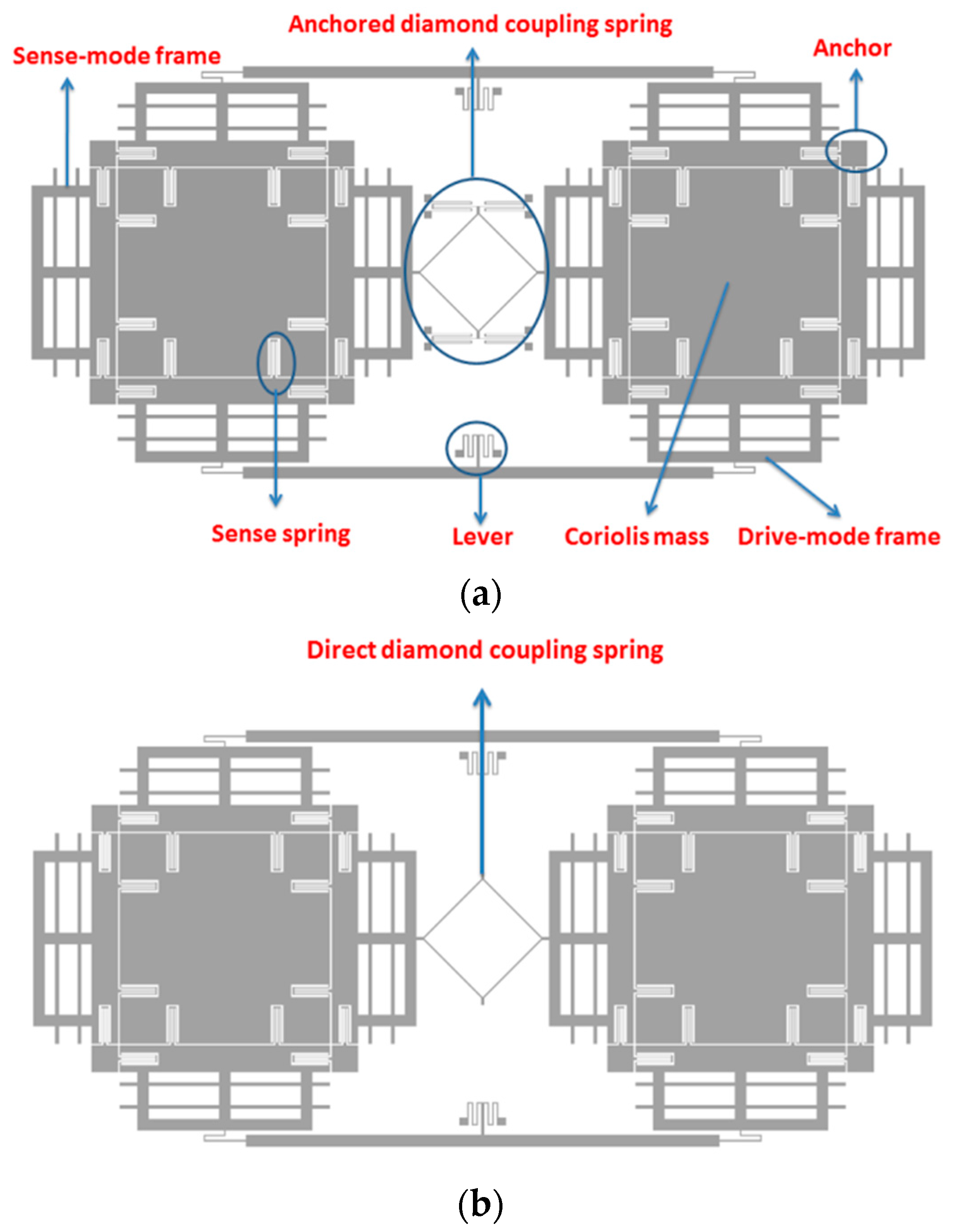
16]. The type A architecture is a dual-mass structure where the left mass and right mass are symmetrical, as depicted in
Figure 1a, which shows two identical masses, a lever beam and an anchored diamond coupling spring. The architecture of type B is the same with as that of type A, except for the fact that the coupling type, which is direct coupling via a diamond spring, is different, as depicted in
Figure 1b.
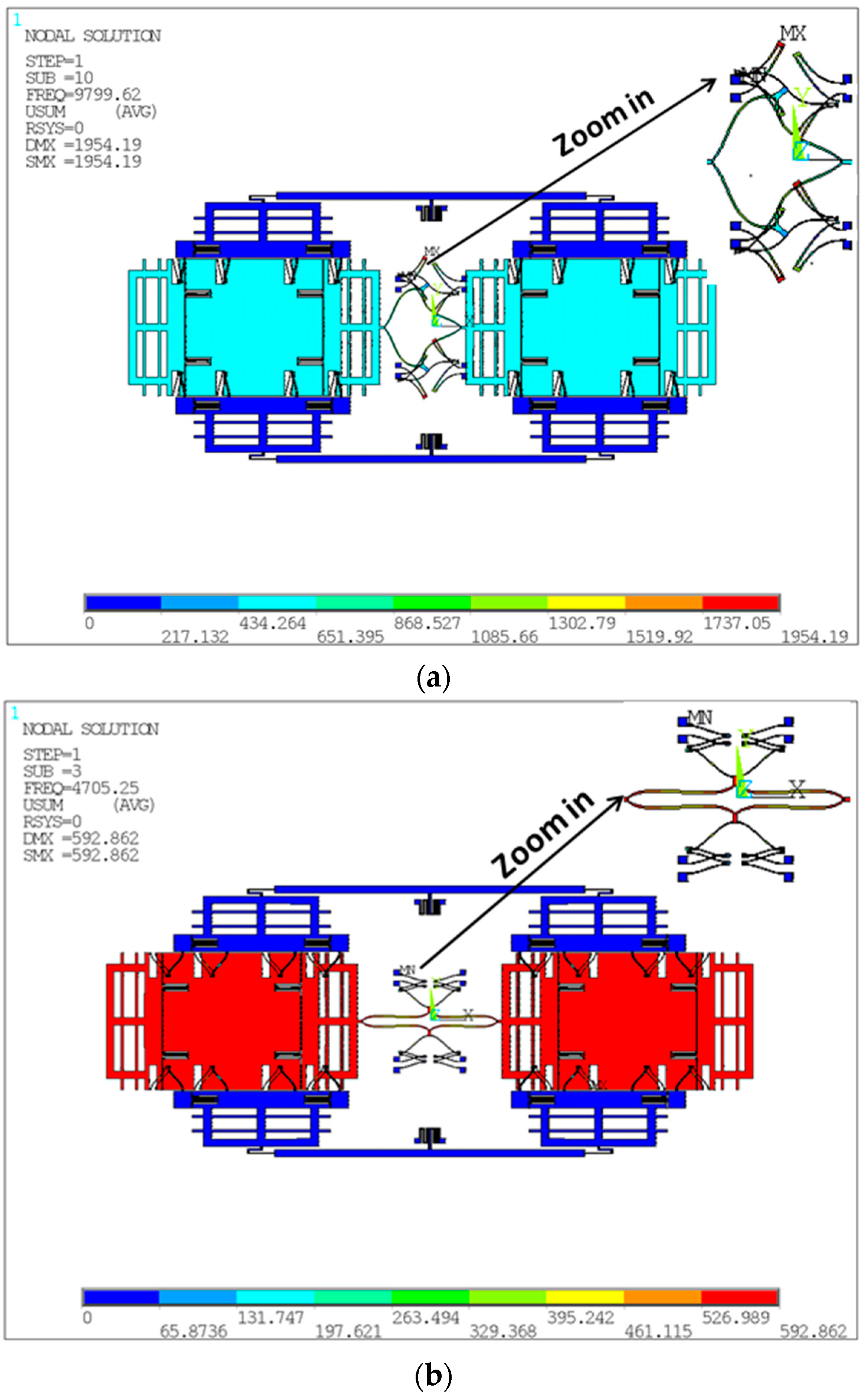
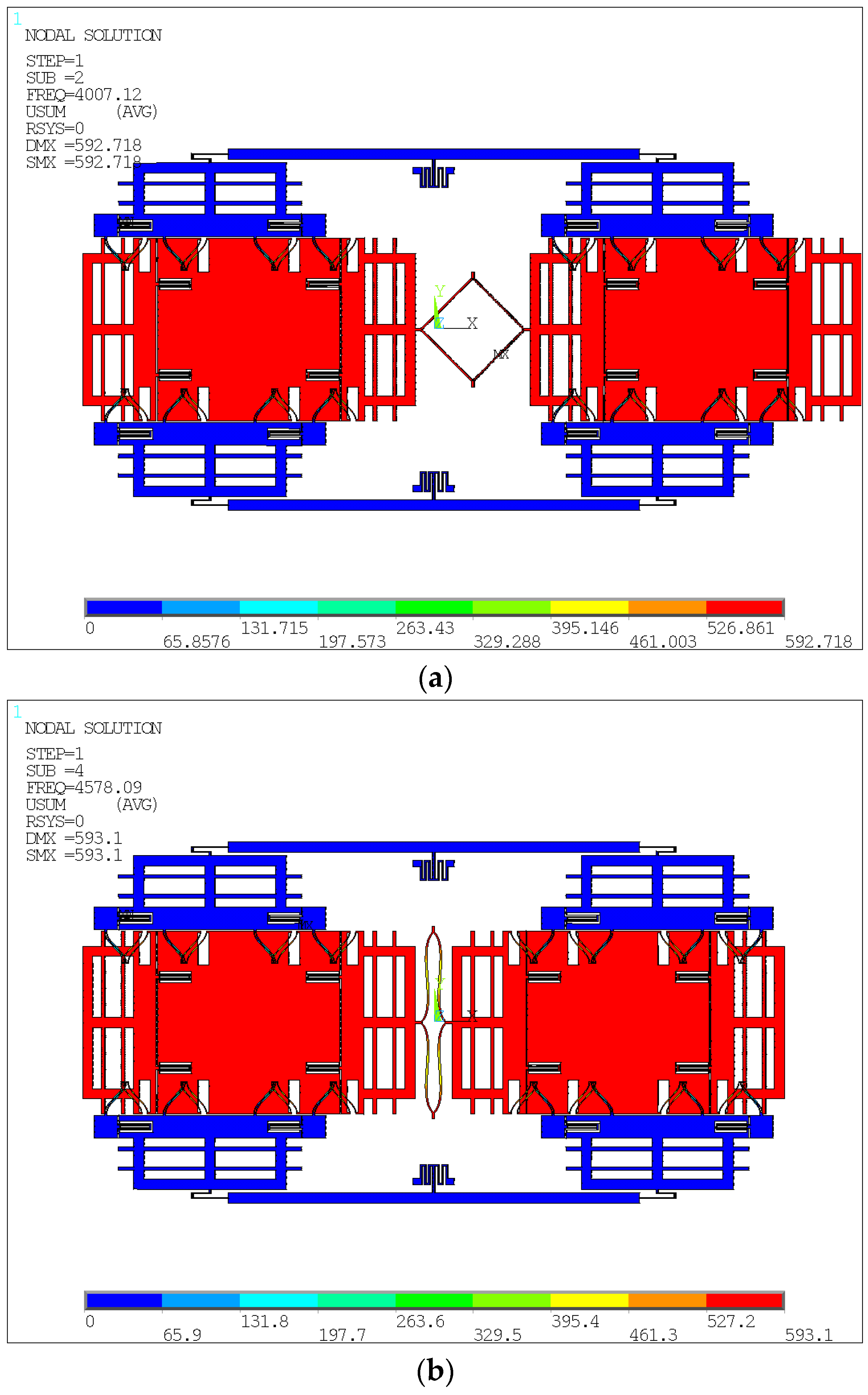
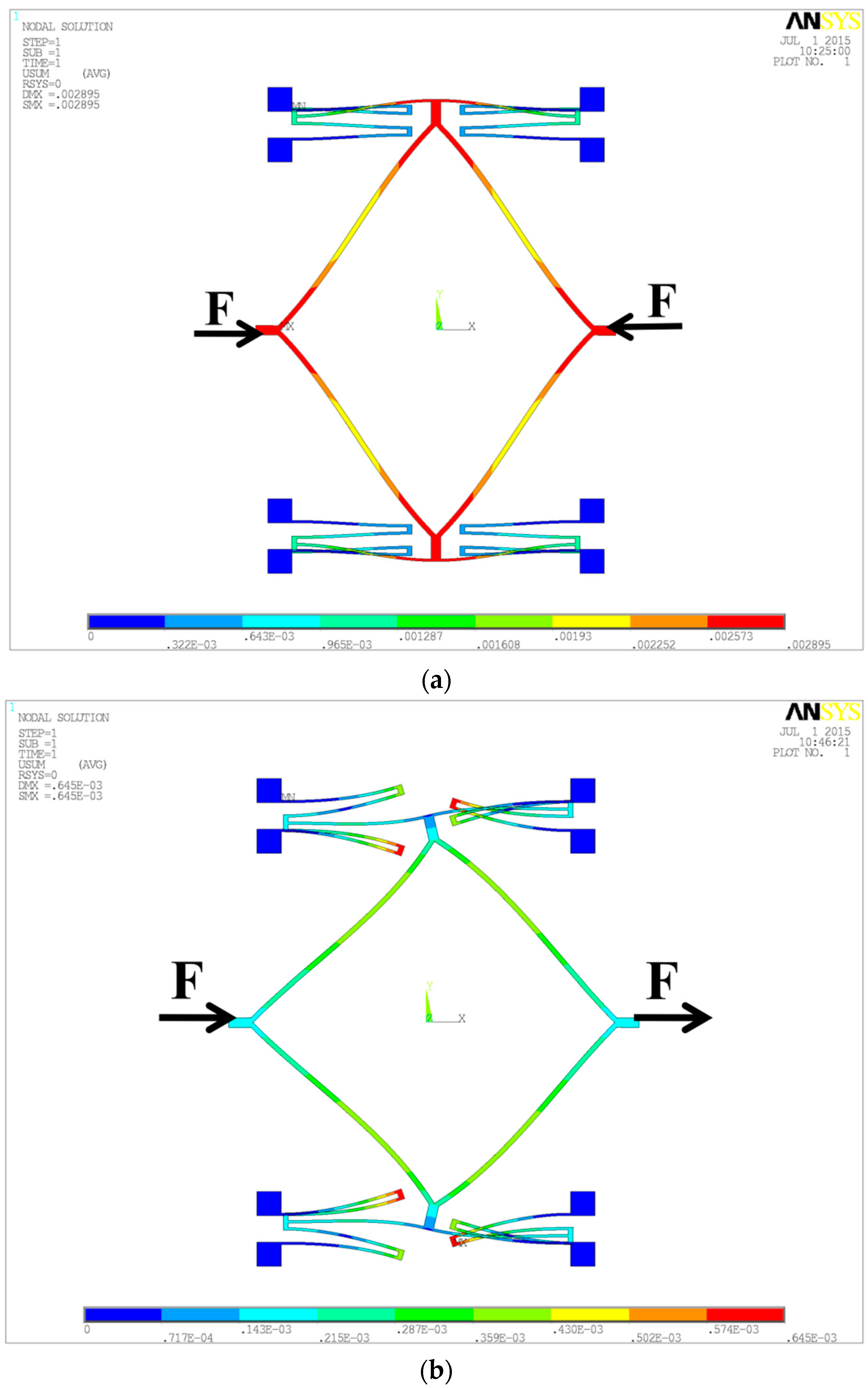
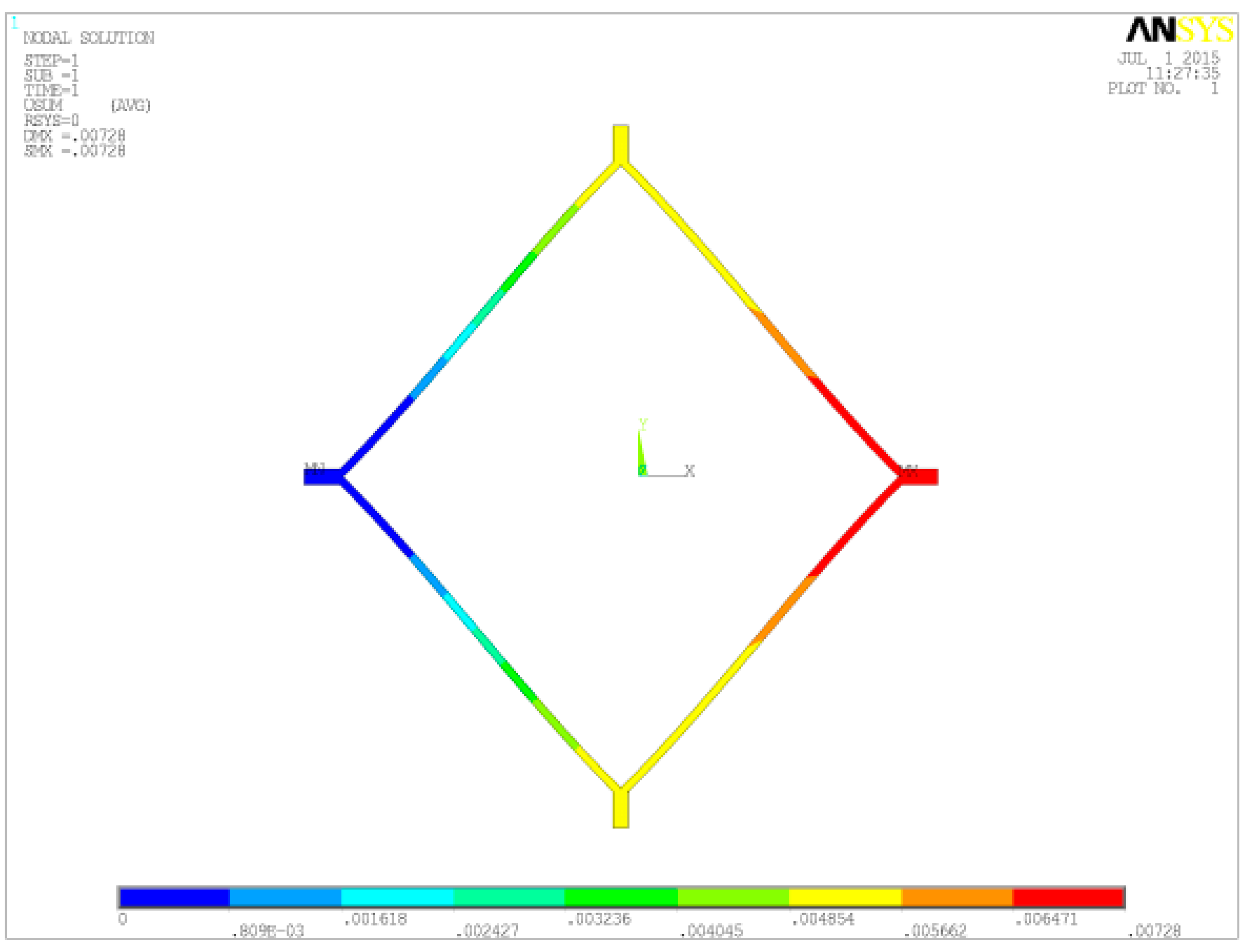
Every tine includes a Coriolis mass and two frames, supported by symmetrical springs. The springs, except the supporting lever springs and the anchored coupling ones, are the same to increase the robustness of the mode-match between drive and sense modes and to resist any temperature shifts of the resonance frequencies. The electrodes are variable-area capacitances to guarantee the linearity of the capacitance change with the displacement in the motion direction parallel to the plates. The mode analysis of two types in the in- and anti-phase modes in the sense direction is carried out and shown in
Figure 2a,b and
Figure 3a,b, respectively. It is demonstrated that the Type A architecture can optimize the modal order. Specifically, the in-phase mode frequency is improved by nearly 110% compared with the anti-phase. Therefore, the Type A structure offers a new architecture to truly reject the external shock and vibration by making the in-phase modal frequency larger than the anti-phase.
3. Theoretical Analysis
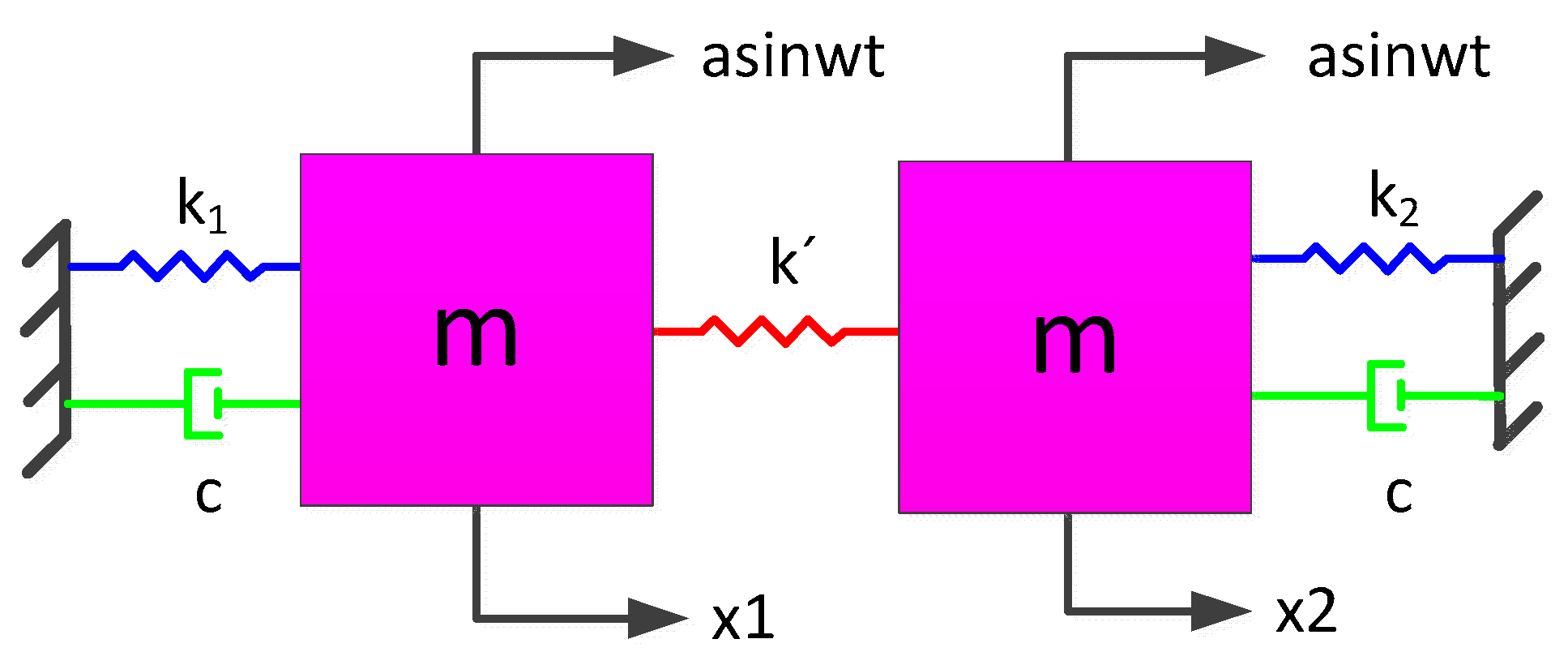
First, the non-ideal TFG model is shown in
Figure 4. The dynamics are governed by:
Subtracting Equation (2) from Equation (1), one obtains:
Adding Equations (1) and (2), one obtains:
Here, m and c are the mass and damping of each tine respectively, k1 and k2 denote the stiffness and k’ is the coupling stiffness in the anti-phase mode, x1 and x2 are the displacement, asinwt is the external acceleration acting on the whole TFG, in which a denotes the amplitude and w is the angular frequency.
Since the vibration output of in- and anti-phase modes needs to be analyzed, a coordinate transformation is made as follows:
Substituting Equation (5) into Equations (3) and (4), one obtains:
where
,
,
,
,
. In which,
and
are the defined resonant frequencies in the anti- and in-phase modes,
and
are quality factors of the ideal anti- and in-phase motions and
is the stiffness imbalance.
The Equation (6) can be expressed as a matrix representation:
where:
,
,
,
,
The natural frequency can be obtained by using the characteristic equation:
where
is the first-order resonant frequency and
is the second-order resonant frequency.
The modal superposition technique is used to acquire the steady-state response through solving Equation (7):
where, the magnification factor of amplitudes
, the phase angle
, the frequency ratio
, and the damping ratio
.
When
, we can obtain that:
where the anti-phase stiffness is
, and the in-phase stiffness is
.
Considering the actual fabrication defects,
and using the Taylor series expansion:
so Equation (10) can be rewritten as:
where
is the first-order mode Q-factor.
When
, we can obtain that:
where
is the second-order mode Q-factor.
Considering that
and by the Taylor series expansion:
so, Equation (12) can be rewritten as:
The traditional direct coupling beam has no deformation in the in-phase mode, so is and is . However, the deformation styles of the anchored coupling beam are different in the in- and anti-phase modes. In the anti-phase, the beam is bent under a lateral load while the beam is tensile (compressed) under an axial load in the in-phase. So, the stiffness of the anchored coupling beam in the in-phase mode is added to the in-phase stiffness, and is , and is the coupling stiffness in the in-phase mode and is .
Since the in-phase stiffness is different between the direct coupling and anchored coupling TFGs, the vibration output in the anchored coupling structure should be recalculated. Considering the actual fabrication defects,
and using the Taylor series expansion:
so, Equation (10) can be rewritten as:
Equation (12) can be rewritten as:
Here, the dimensionless parameters
and
are defined.
denotes the stiffness imbalance, and
denotes the ratio of the stiffness difference between in- and anti-phase modes to the stiffness
in the sense direction, which is defined as the stiffness difference ratio (SDR). The two parameters are given by:
Then, Equations (11) and (14) can be expressed as:
Equations (13) and (15) can be expressed as:
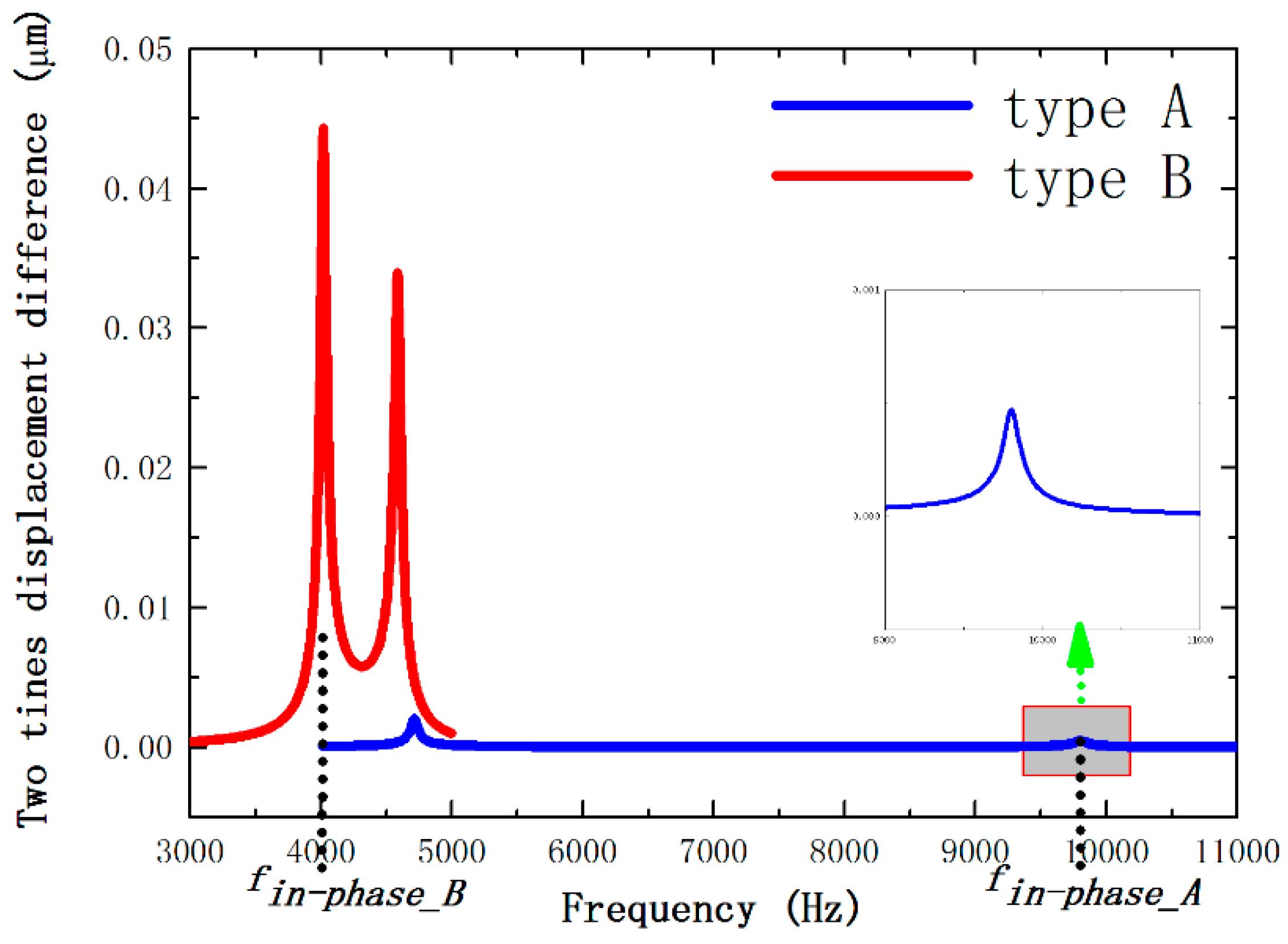
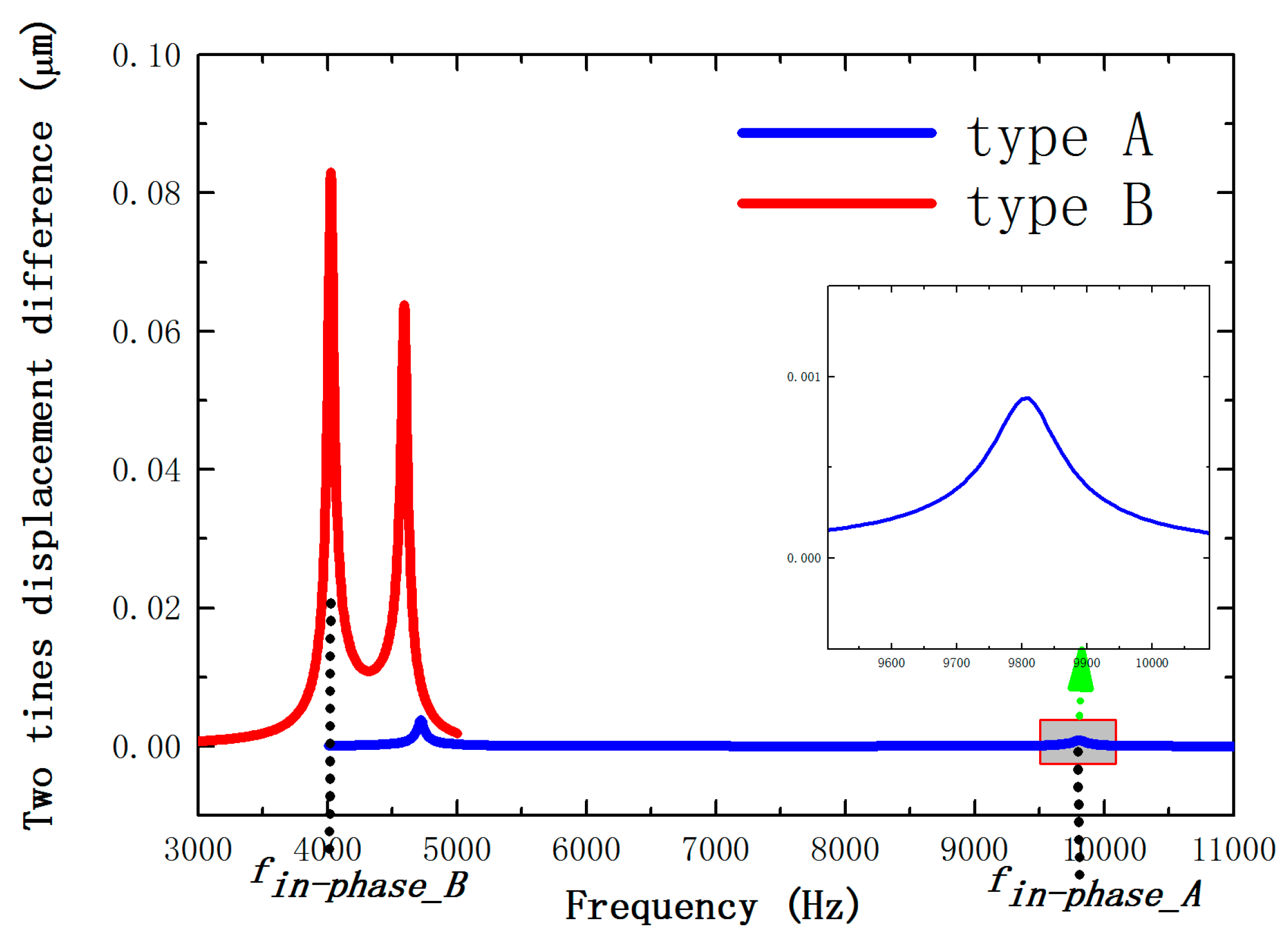
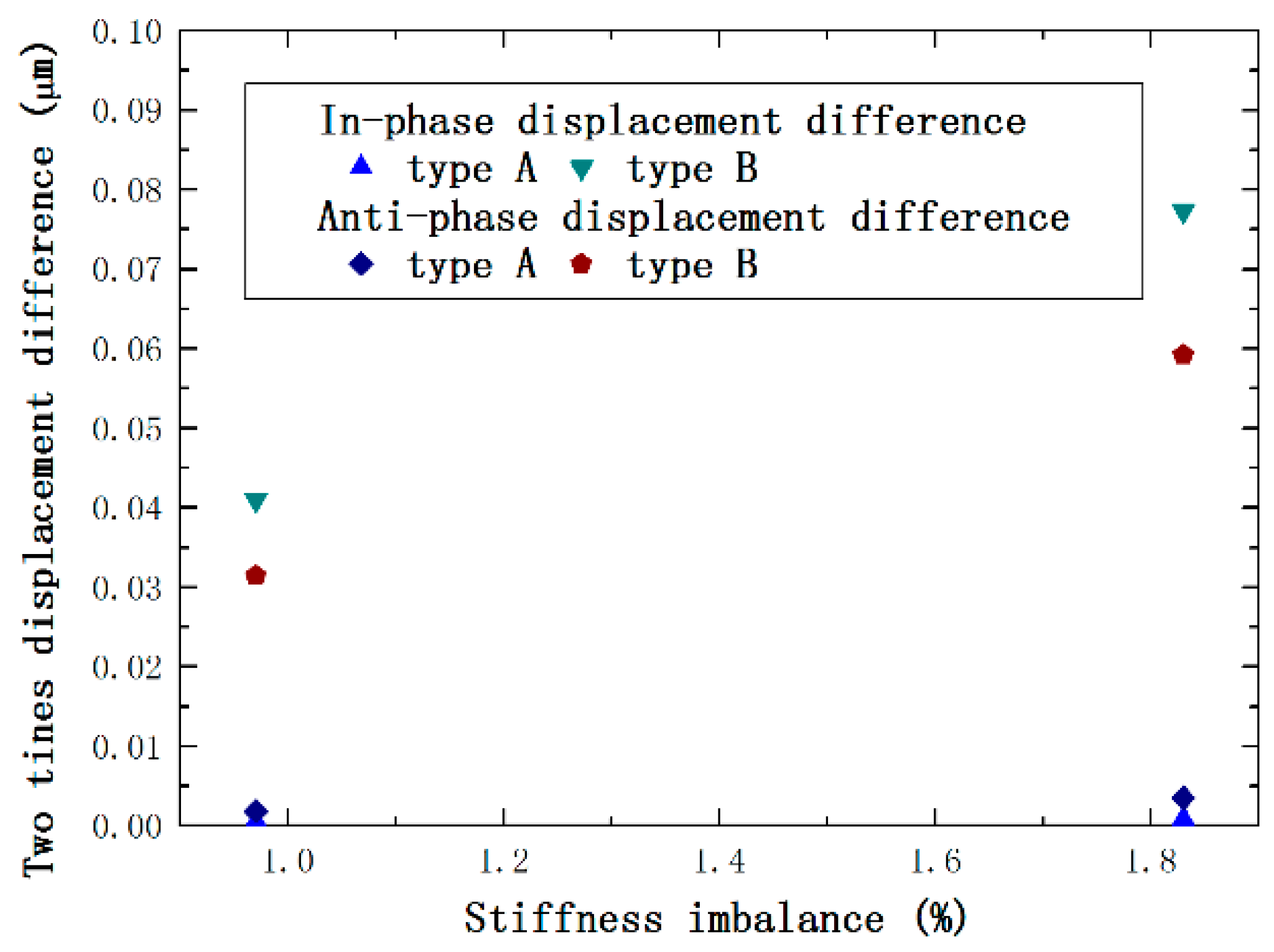
From Equations (16) and (17), it is figured out that the anti-phase vibration output is proportional to and inversely proportional to the stiffness difference ratio .
5. Discussion
From the theoretical analysis of the anchored coupling tuning fork gyroscopes, it is concluded that the anti-phase vibration output is proportional to and inversely proportional to . To reduce , one way is to increase the beam widths and another one is to design a control circuit to suppress the stiffness imbalance. However, increasing the beam widths will reduce the scale factor and a stiffness-match circuit induces more complexity. Therefore, it is a more practical approach to increase the stiffness difference ratio only by changing the style of the coupling beam without sacrificing the sensitivity.
Actually, the deformation styles of the anchored coupling beam are different in the in- and anti-phase modes. In the anti-phase mode, the beam is bent under a lateral load while the beam is tensile (compressed) under an axial load in the in-phase described in
Figure 5, which causes the stiffness in the in-phase mode is an order of magnitude larger than the anti-phase, so it can be believed that the vibration output of the anchored coupling style will be lower than the direct coupling style because of a larger stiffness difference ratio.
The analytical model we propose can be used for both anchored coupling TFGs and direct coupling TFGs. In our previous study [
13], the analytical solutions of the vibration output of the direct coupling TFGs are calculated by using the matrix perturbation technique, which has been verified through our FEM simulations and experimental tests by other researchers [
12]. The analytical expressions are in accordance with Equations (16) and (17), which proves the proposed analytical model in this paper. The analytical model is also valid to evaluate the vibration output of anchored coupling TFGs and only some of the parameters are different. The primary difference between the two types of TFGs is the coupling stiffness in the in-phase mode. The coupling stiffness in the in-phase is zero in the direct coupling one and the anchored coupling one is larger, which causes that the in-phase mode frequency is much higher than the anti-phase (improved mode ordering) and that the stiffness difference ratio is larger than the direct coupling one (reduced vibration sensitivity). In future studies, the anchored coupling TFGs we proposed will be fabricated and verified experimentally.
If someone proposes a cross structure, or anything similar, our modeling as presented in this paper will also be effective. Perhaps, some new structures will be designed to provide a higher stiffness difference ratio in the future. We believe that our theoretical model can be valid still.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}