
Sample-Wise Aiding in GPS/INS Ultra-Tight Integration for High-Dynamic, High-Precision Tracking


Abstract
:
1. Introduction
2. Performance of Traditional Doppler Aiding
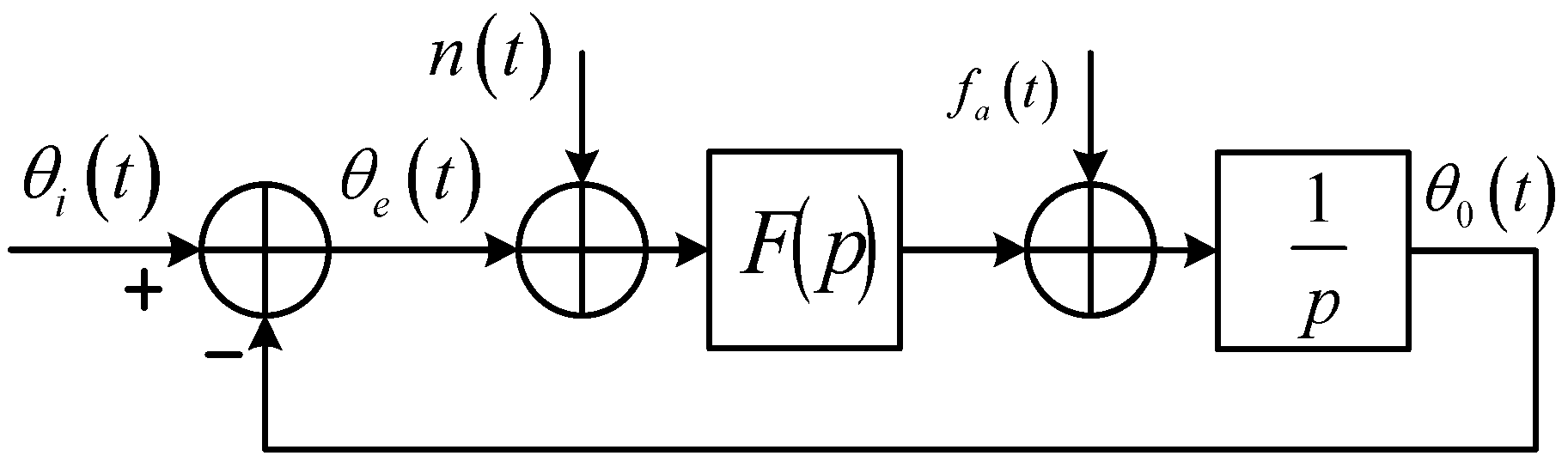
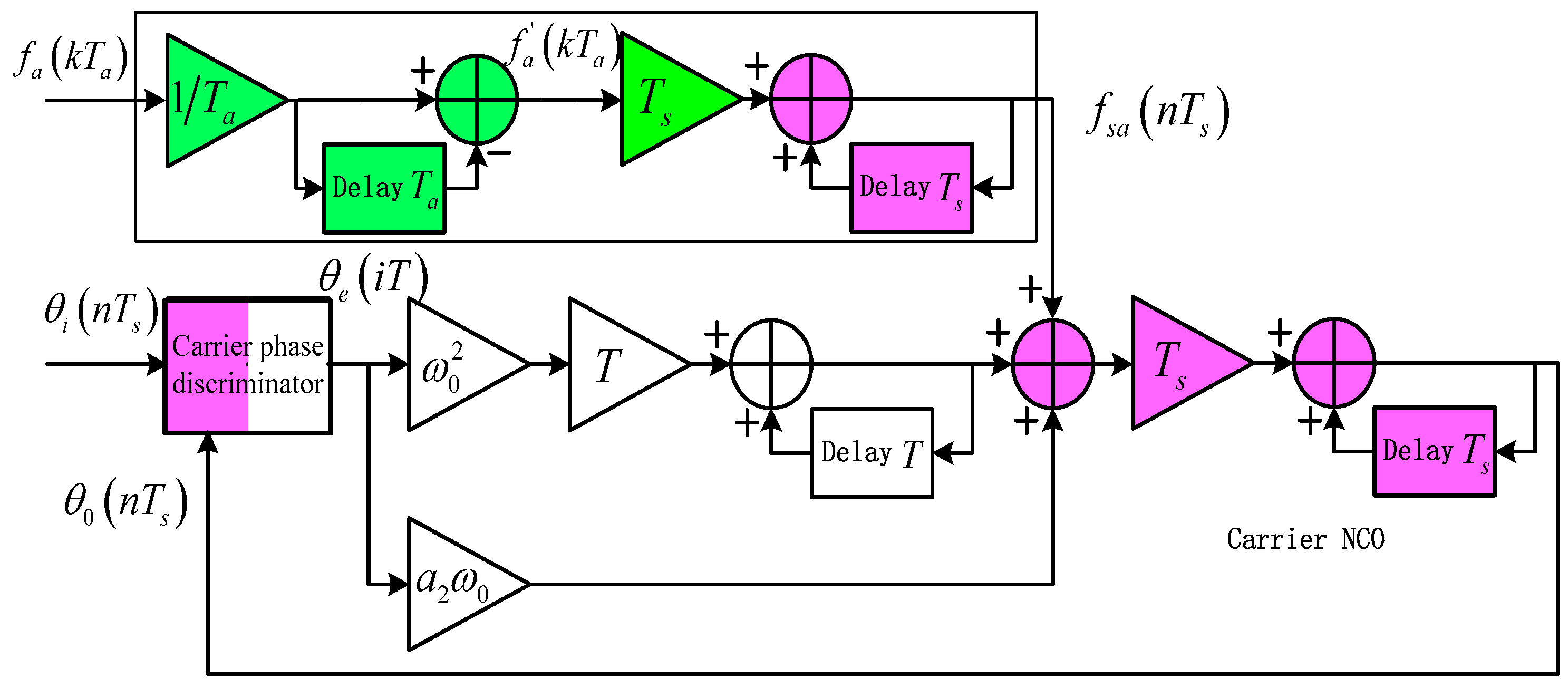
3. Sample-Wise Doppler-Aided PLL
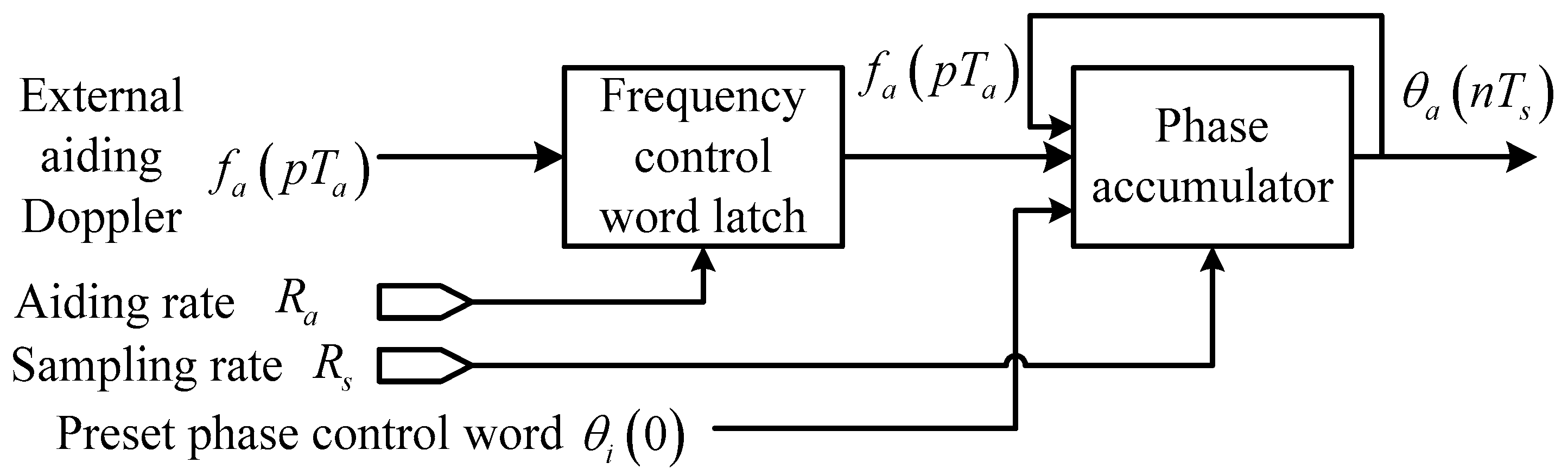
3.1. Ideal Sample-Wise Doppler Aiding
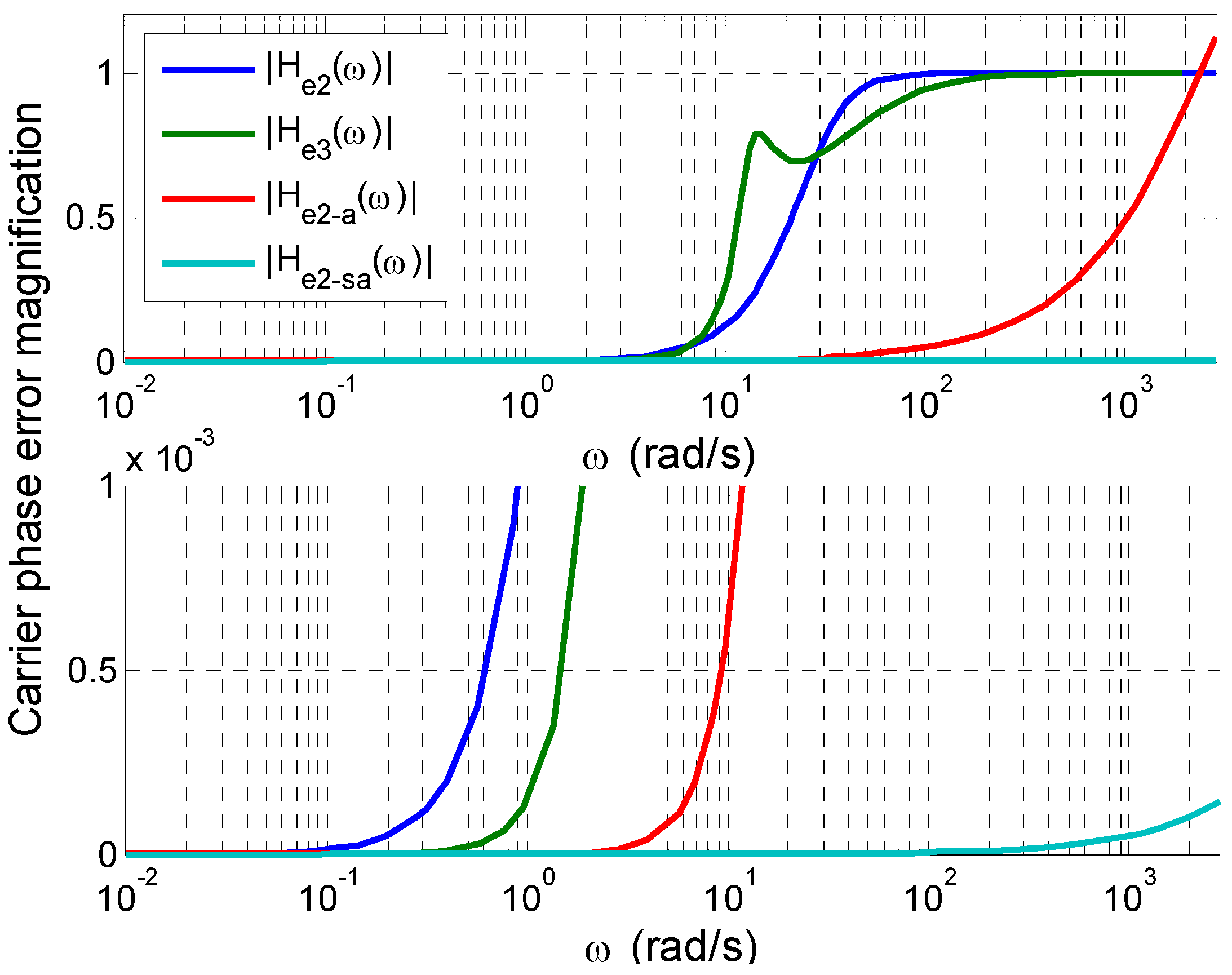
- When the frequency of the LOS dynamic vibration goes much higher than the natural frequency of the loop, the unaided carrier tracking loop has an amplitude magnification of near 1 with hardly any suppression on the dynamic stress error.
- Except for the frequency range of 6.7 < ω < 28.6 (rad/s), the unaided third-order PLL shows better dynamic performance than the unaided second-order PLL.
- For the dynamic vibrations with , the traditional Doppler aiding cannot improve tracking performance efficiently.
- Since is normally several orders of magnitude smaller than , the phase error can be significantly reduced by sample-wise Doppler aiding.
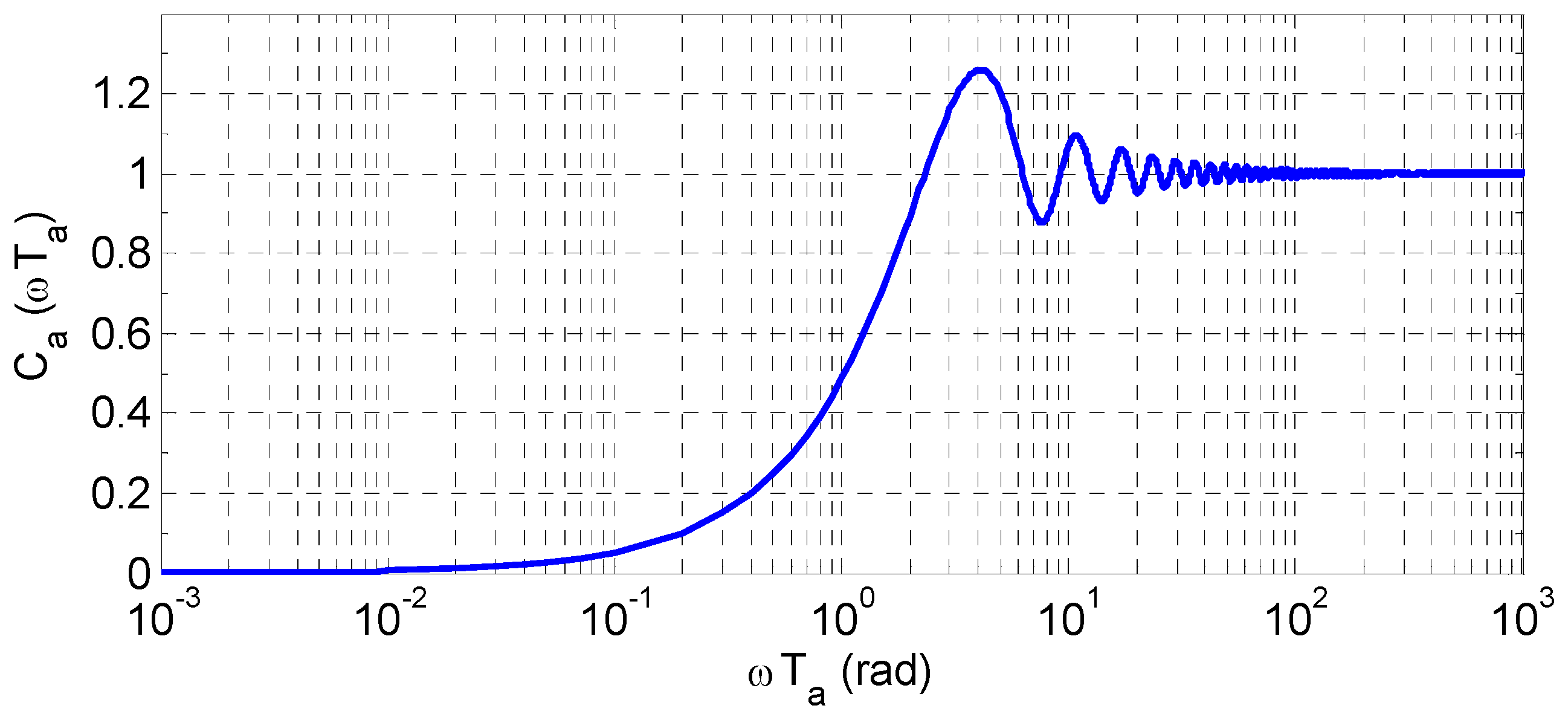
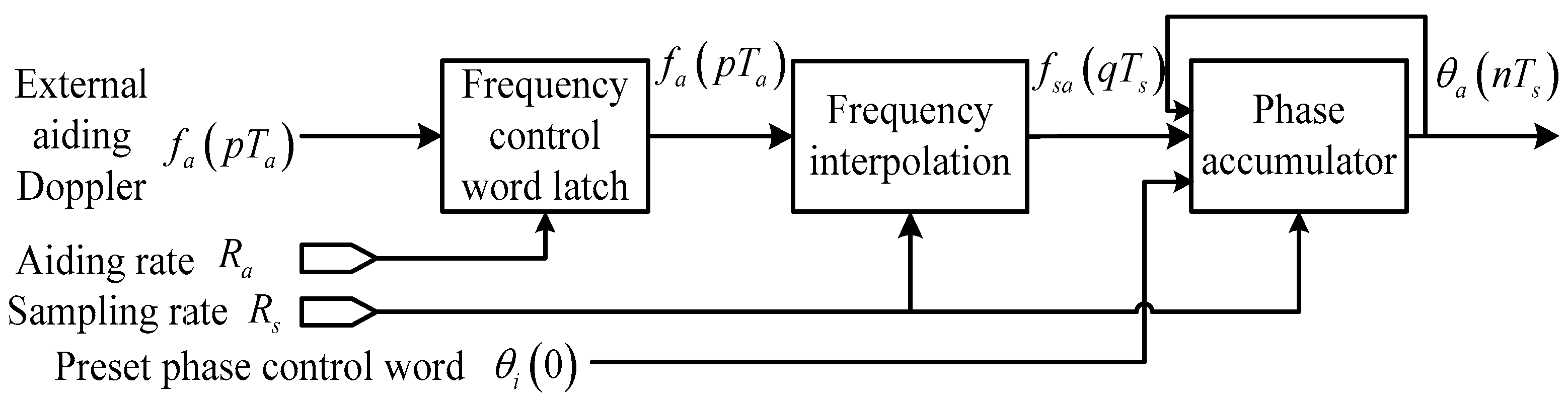
3.2. Effects of Interpolation Techniques
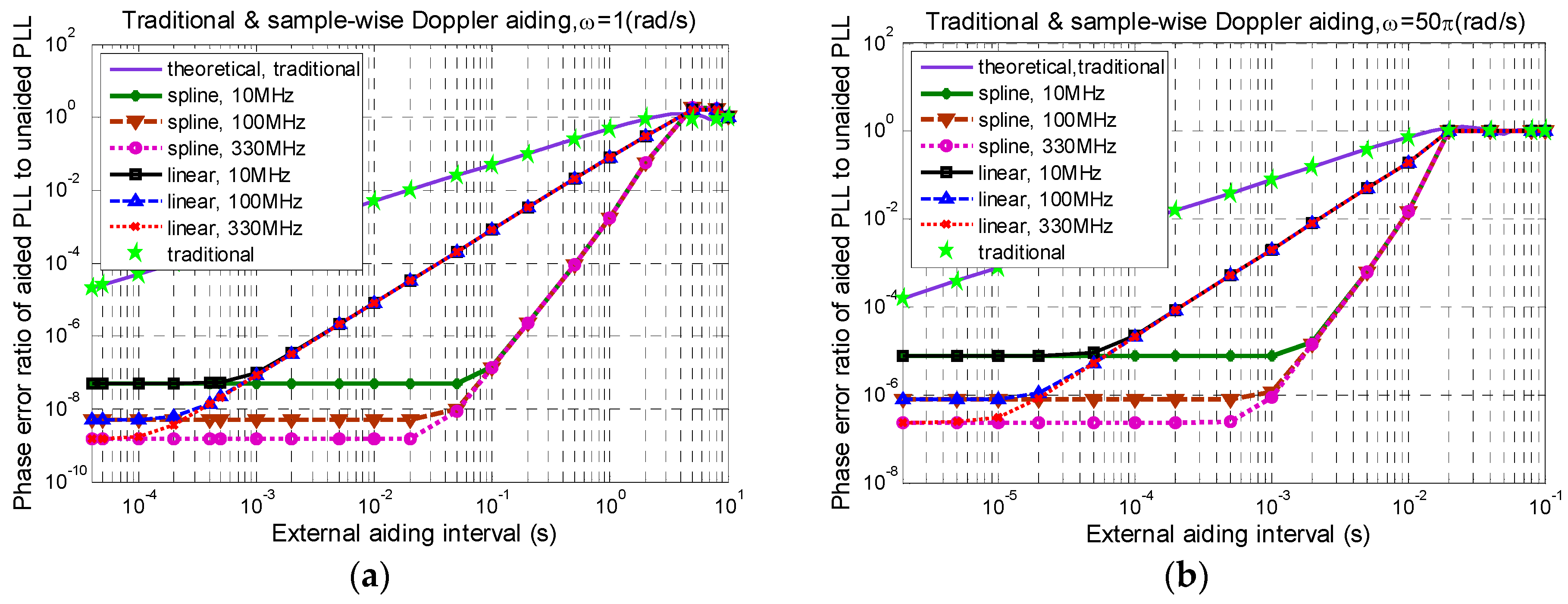
- Equation (10) is accurate to quantify the effectiveness of traditional Doppler aiding, regardless of the aiding data error and the time alignment error.
- When , any aiding technique cannot suppress the dynamic stress error efficiently and, thus, is not worth the bother.
- When Ta begins to decrease from its upper threshold , sample-wise aiding with linear interpolation shows better tracking performance than traditional aiding, yet its improvement cannot catch up with the spline interpolation, until that reaches a certain lower threshold, denoted by . When , the ratio of the phase error amplitudes of sample-wisely aided PLL to unaided PLL will be only determined by the theoretical limit , independent of , and cannot be improved by employing other more advanced interpolation techniques. In addition, before reaching the lower threshold, there is a middle threshold of Ta, such that for the region, the improvement effect of sample-wisely aided PLL to unaided PLL is only determined by and the interpolation method, independent of , and can be improved by employing other more advanced interpolation techniques.
4. Test Results and Discussion
4.1. Test Setups and Scenarios
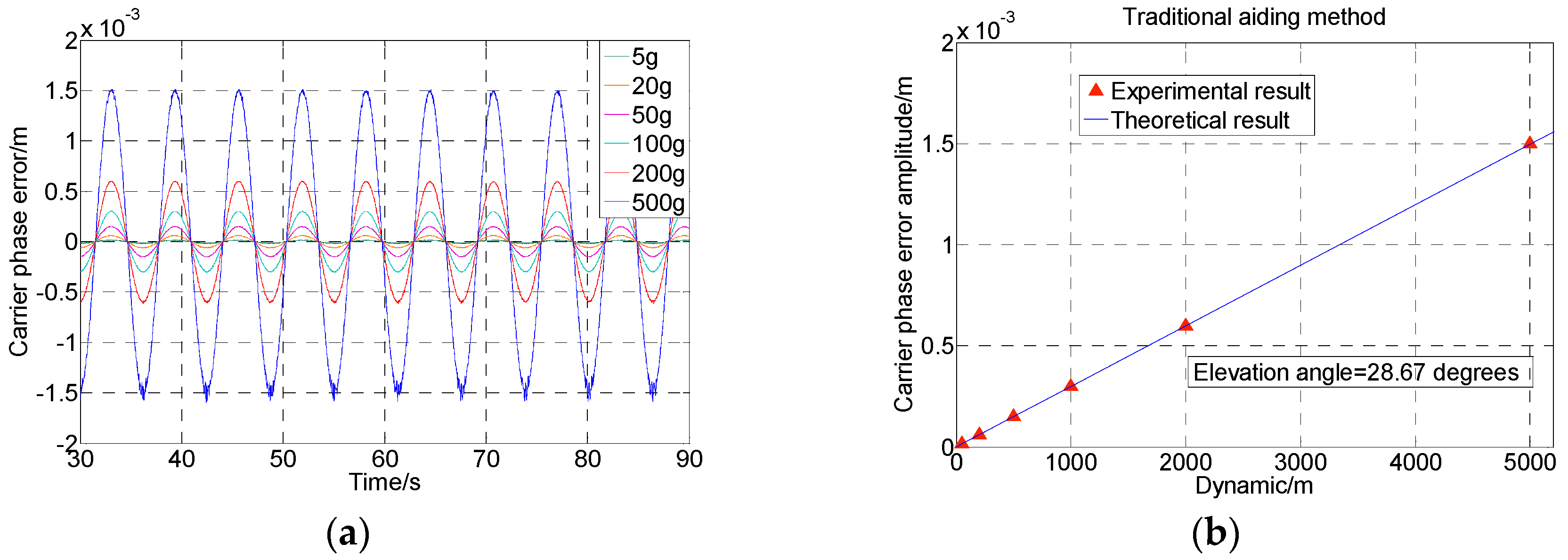
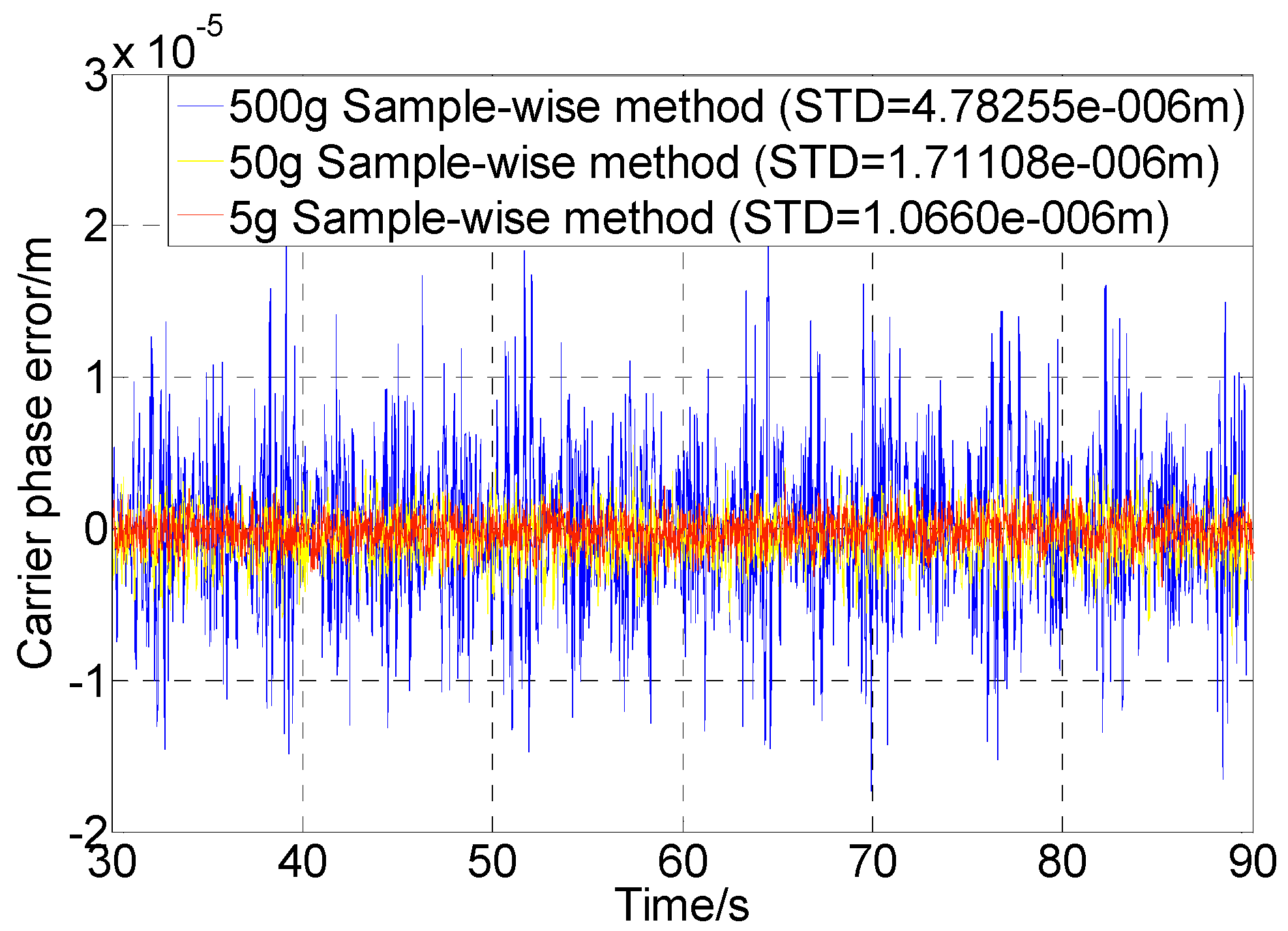
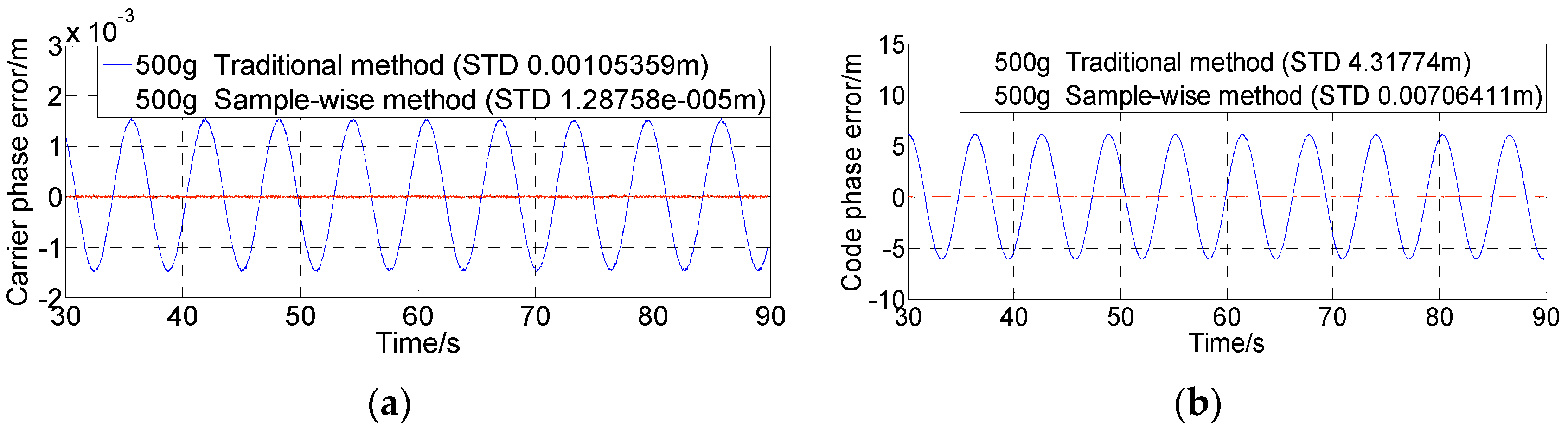
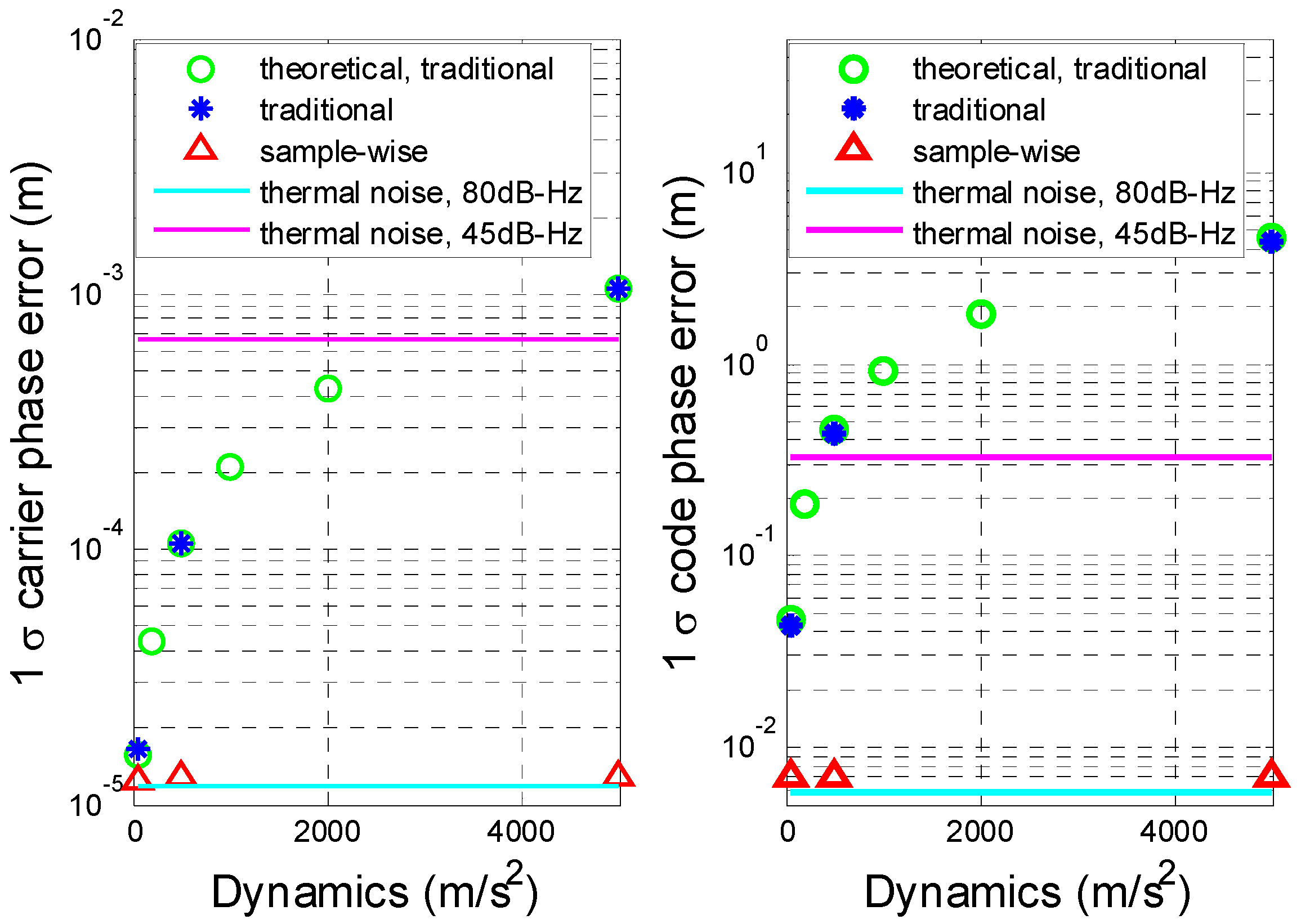
4.2. Aiding Effects on Carrier Phase Errors with no Thermal Noise in the Signal
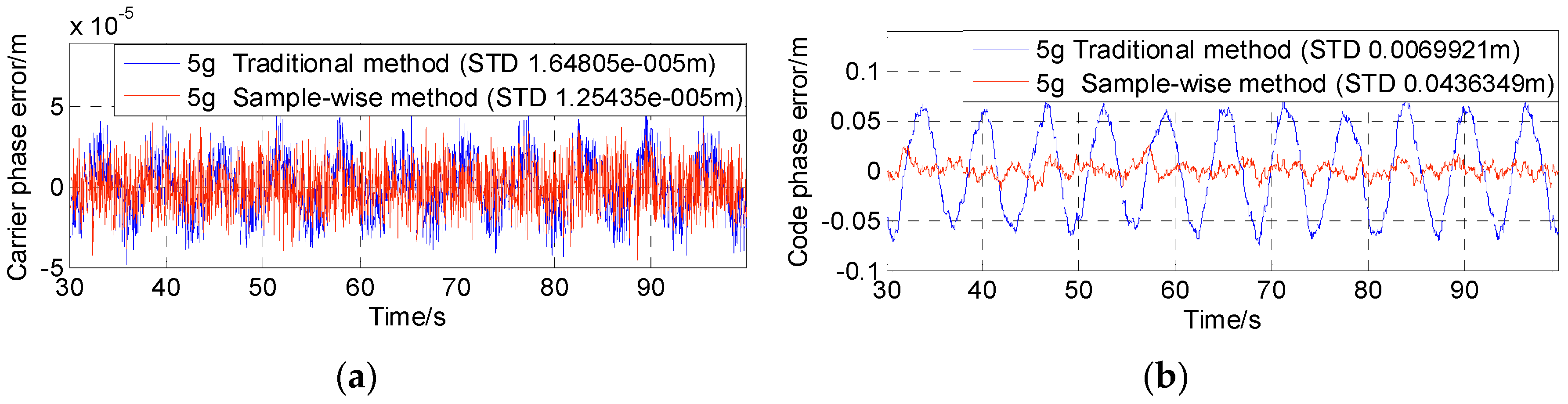
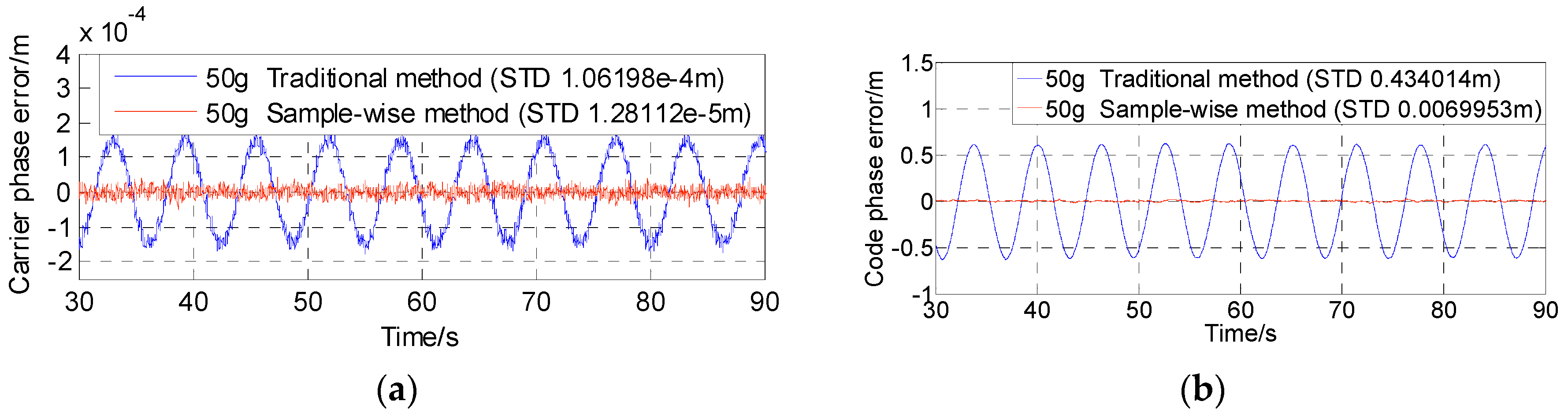
4.3. Aiding Effects on Code/Carrier Phase Errors with a C/N0 of 80 dB-Hz
5. Conclusions
- By examining the digital implementation of the Doppler-aided PLL in scalar tracking-based GPS/INS ultra-tight integration, a theoretical expression of the ratio of phase error amplitudes of an aided loop to an unaided loop is derived, which indicates how the aiding effects are impacted by the product of the frequency of signal dynamics and the INS aiding rate.
- A new sample-wise aiding method in GPS/INS ultra-tight integration for high-dynamic, high-precision tracking has been presented. Its effectiveness and advantage over traditional aiding have not only been analytically expressed and numerically simulated, but also physically tested using a digital IF signal simulator and a software receiver.
- The simulation with respect to the effects of two interpolation techniques on the sample-wise aiding performance helps to find the boundary conditions of the aiding methods in terms of the INS aiding data update rate.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Farrell, J.A.; Barth, M. The Global Positioning System & Inertial Navigation; McGraw-Hill: New York, NY, USA, 1999. [Google Scholar]
- Ward, P.W.; Betz, J.W.; Hegarty, C.J. Satellite Signal Acquisition, Tracking, and Data Demodulation. In Understanding GPS Principles and Applications, 2nd ed.; Kaplan, E.D., Hegarty, C.J., Eds.; Artech House: Norwood, MA, USA, 2006; pp. 153–241. [Google Scholar]
- Jwo, D. GPS receiver performance enhancement via inertial velocity aiding. J. Navig. 2001, 54, 105–117. [Google Scholar] [CrossRef]
- Abbott, S.; Lillo, W.E. Global Positioning Systems and Inertial Measuring Unit Ultratight Coupling Method. US Patent No. 6516021, 4 February 2003. [Google Scholar]
- Ohlmeyer, E.J. Analysis of an Ultra-Tightly Coupled GPS/INS System in Jamming. In Proceedings of the 2006 IEEE/ION Position, Location, and Navigation Symposium, San Diego, CA, USA, 25–27 April 2006; pp. 44–53.
- Alban, S. Design and Performance of a Robust GPS/INS Attitude System for Automobile Applications. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2004. [Google Scholar]
- Lashley, M.; Bevly, D.M. A Comparison of the Performance of a Non-Coherent Deeply Integrated Navigation Algorithm and a Tightly Coupled Navigation Algorithm. In Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2008), Savannah, GA, USA, 16–19 September 2008; pp. 2123–2129.
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2008. [Google Scholar]
- Qin, F.; Zhan, X.; Du, G. Performance Improvement of Receivers Based on Ultra-Tight Integration in GNSS-Challenged Environments. Sensors 2013, 13, 16406–16423. [Google Scholar] [CrossRef]
- Yang, Y.; El-Sheimy, N. Improving GPS Receiver Tracking Performance of PLL by MEMS IMU Aiding. In Proceedings of the 19th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2006), Fort Worth, TX, USA, 26–29 September 2006; pp. 2192–2201.
- Alban, S.; Akos, D.M.; Rock, S.M.; Egziabher, D.G. Performance Analysis and Architectures for INS-Aided GPS Tracking Loops. In Proceedings of the Institute of Navigation’s National Technical Meeting, Anaheim, CA, USA, 22–24 January 2003.
- Gebre-Egziabher, D.; Razavi, A.; Enge, P.; Gautier, J.; Pullen, S.; Pervan, B.S.; Akos, D. Sensitivity and Performance Analysis of Doppler-Aided GPS Carrier-Tracking Loops. Navigation 2005, 52, 49–60. [Google Scholar] [CrossRef]
- Chiou, T.Y. GPS Receiver Performance Using Inertial-Aided Carrier Tracking Loop. In Proceedings of the ION GNSS 18th International Technical Meeting of the Satellite Division, Long Beach, CA, USA, 13–16 September 2005.
- Spilker, J.J., Jr. Fundamentals of Signal Tracking Theory. In Global Positioning System: Theory and Applications; Parkinson, B.W., Spilker, J.J., Jr., Eds.; American Institute of Aeronautics and Astronautics Inc.: Reston, VA, USA, 1994; Volume I, pp. 290–305. [Google Scholar]
- Gustafson, D.; Dowdle, J.R.; Elwell, J.M. Deeply-Integrated Adaptive GPS-Based Navigator with Extended-Range Code Tracking. U.S. Patent US6331835B1, 18 December 2001. [Google Scholar]
- Petovello, M.G.; Lachapelle, G. Comparison of vector-based software receiver implementations with application to ultra-tight GPS/INS integration. In Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS '06), Fort Worth, TX, USA, 26–29 September 2006; pp. 1790–1799.
- Lashley, M. Modeling and Performance Analysis of GPS Vector Tracking Algorithms. Ph.D. Thesis, Auburn University, Auburn, AL, USA, 18 December 2009. [Google Scholar]
- Lashely, M.; Bevly, D.M. Performance Comparison of Deep Integration and Tight Coupling. Navigation 2013, 60, 159–178. [Google Scholar] [CrossRef]
- Babu, R.; Wang, J. Comparative study of interpolation techniques for ultra-tight integration of GPS/INS/PL sensors. J. Glob. Posit. Syst. 2005, 1, 192–200. [Google Scholar] [CrossRef]
- Babu, R.; Wang, J. Ultra-Tight GPS/INS/PL Integration: A system Concept and Performance Analysis. GPS Solut. 2009, 13, 75–82. [Google Scholar] [CrossRef]
- Sivananthan, S.; Weitzen, J. Sub-Optimality of the Prefilter in Deeply Coupled Integration of GPS and INS. Navigation 2010, 57, 175–184. [Google Scholar] [CrossRef]
- Won, J.H.; Dotterbock, D.; Eissfeller, B. Performance Comparison of Different Forms of Kalman Filter Approaches for Vector-Based GNSS Signal Tracking Loop. Navigation 2010, 57, 185–199. [Google Scholar] [CrossRef]
- Hwang, D.B.; Lim, D.W.; Cho, S.L.; Lee, S.J. Unified approach to ultra-tightly-coupled GPS/INS integrated navigation system. IEEE Aerosp. Electron. Syst. Mag. 2011, 26, 30–38. [Google Scholar] [CrossRef]
- Xie, F.; Liu, J.; Li, R.; Hang, Y. Adaptive robust ultra-tightly coupled global navigation satellite system/inertial navigation system based on global positioning system/BeiDou vector tracking loops. IET Radar Sonar Navig. 2014, 8, 815–827. [Google Scholar] [CrossRef]
- Qin, F.; Zhan, X.; Zhan, L. Performance assessment of a low-cost inertial measurement unit based ultra-tight global navigation satellite system/inertial navigation system integration for high dynamic applications. IET Radar Sonar Navig. 2014, 8, 828–836. [Google Scholar] [CrossRef]
- Li, K.; Zhao, J.; Wang, X.; Wang, L. Federated ultra-tightly coupled GPS/INS integrated navigation system based on vector tracking for severe jamming environment. IET Radar Sonar Navig. 2016. [Google Scholar] [CrossRef]
- Gardner, F.M. Phaselock Techniques, 3rd ed.; John Willy & Sons: New York, NY, USA, 2005. [Google Scholar]
- Stoer, J.; Bulirsch, R. An Introduction of Numerical Analysis, 3rd ed.; Springer: New York, NY, USA, 2002. [Google Scholar]
- Bartels, R.H.; Beatty, J.C.; Barsky, B.A. An Introduction to Splines for Use in Computer Graphics and Geometric Modeling; Morgan Kaufmann Publishers, Inc.: San Francisco, CA, USA, 1987. [Google Scholar]
- Kou, Y.; Sui, J.; Chen, Y.; Zhang, Z.; Zhang, H. Test of Pseudorange Accuracy in GNSS RF Constellation Simulator. In Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 161–173.
- Sharawi, M.S.; Rochester, M.I.; Akos, D.M.; Aloi, D.N. GPS C/N0 estimation in the presence of interference and limited quantization levels. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 227–238. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Partitions of Ta | Features of Aiding Effect |
|---|---|
| , determined, independent of and interpolation techniques | |
| decreasing as either or decreases | |
| determined, independent of , improved by advanced interpolation technique significantly (at kind of exponential rate) | |
| No much improvement even with smaller and advanced interpolation |
| Dynamics (Acceleration) | Error Amplitude (m) for Unaided 3rd-Order PLL, B = 15 Hz | Error Amplitude (m) for Aided 2nd-Order PLL, B = 15 Hz | Ratio of Unaided to Aided Error Amplitudes |
|---|---|---|---|
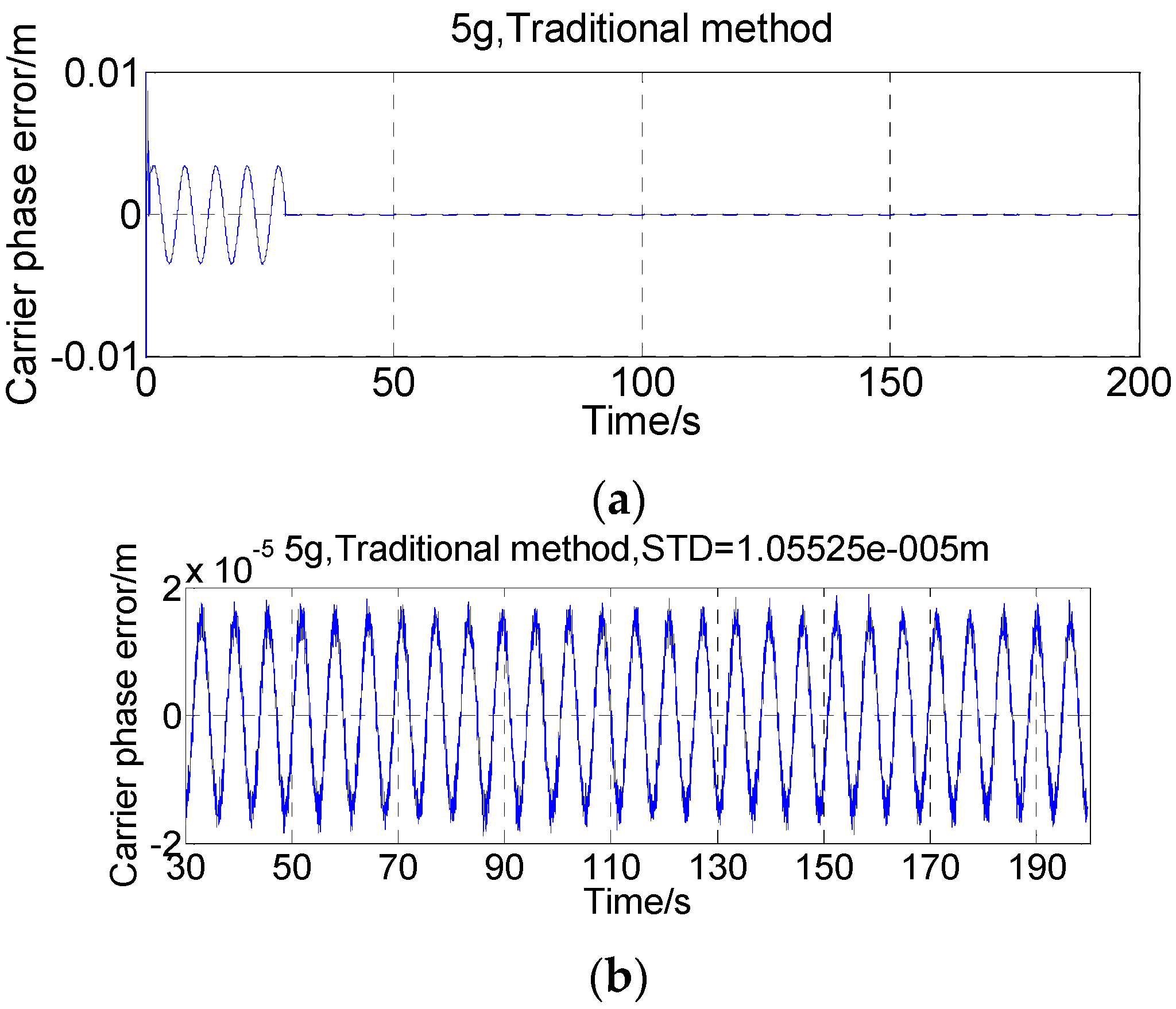
| 5 g | 0.00345 | 1.50 × 10−5 | 230.00 |
| 20 g | 0.0138 | 6.03 × 10−5 | 228.86 |
| 50 g | 0.0345 | 1.49 × 10−4 | 231.54 |
| 100 g | N/A | 3.00 × 10−4 | N/A |
| 200 g | N/A | 6.00 × 10−4 | N/A |
| 500 g | N/A | 1.50 × 10−3 | N/A |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kou, Y.; Zhang, H. Sample-Wise Aiding in GPS/INS Ultra-Tight Integration for High-Dynamic, High-Precision Tracking. Sensors 2016, 16, 519. https://doi.org/10.3390/s16040519
Kou Y, Zhang H. Sample-Wise Aiding in GPS/INS Ultra-Tight Integration for High-Dynamic, High-Precision Tracking. Sensors. 2016; 16(4):519. https://doi.org/10.3390/s16040519
Chicago/Turabian StyleKou, Yanhong, and Han Zhang. 2016. "Sample-Wise Aiding in GPS/INS Ultra-Tight Integration for High-Dynamic, High-Precision Tracking" Sensors 16, no. 4: 519. https://doi.org/10.3390/s16040519