
Channel Measurement and Modeling for 5G Urban Microcellular Scenarios

Abstract
:1. Introduction
2. Urban Microcellular Measurement Campaigns
2.1. Channel Sounder
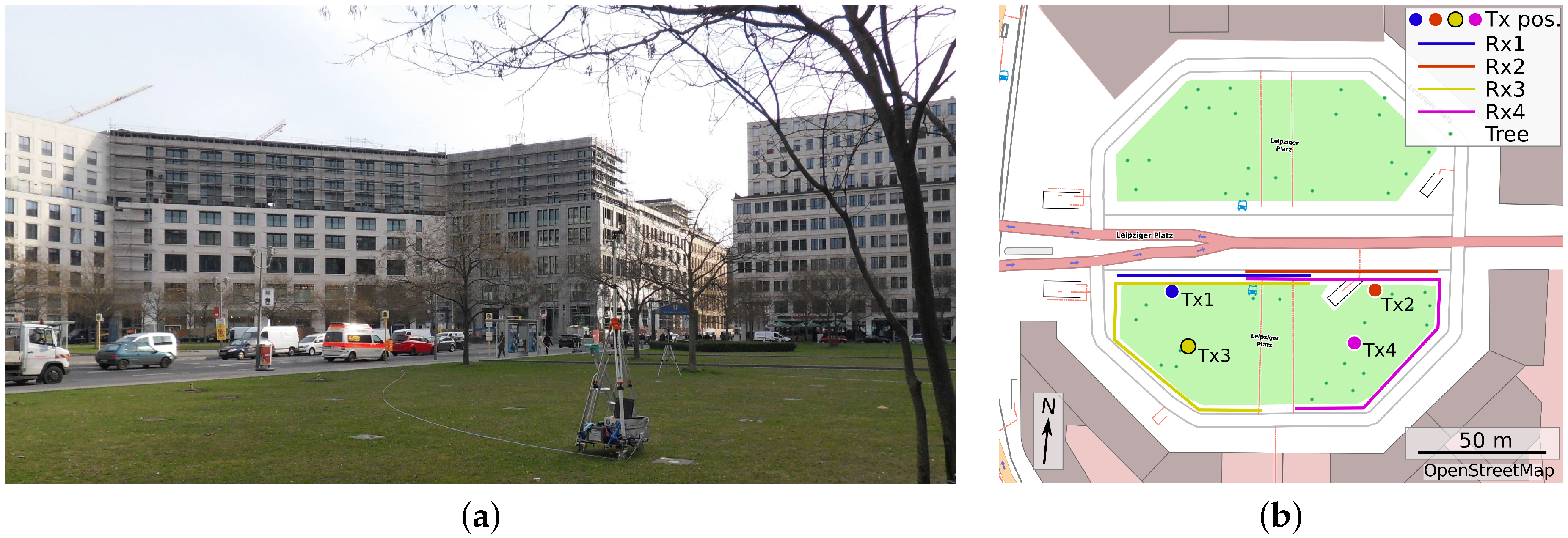
2.2. Open Square Measurements
3. Ray Tracing Simulations
4. Evaluations
4.1. Power Delay Profiles
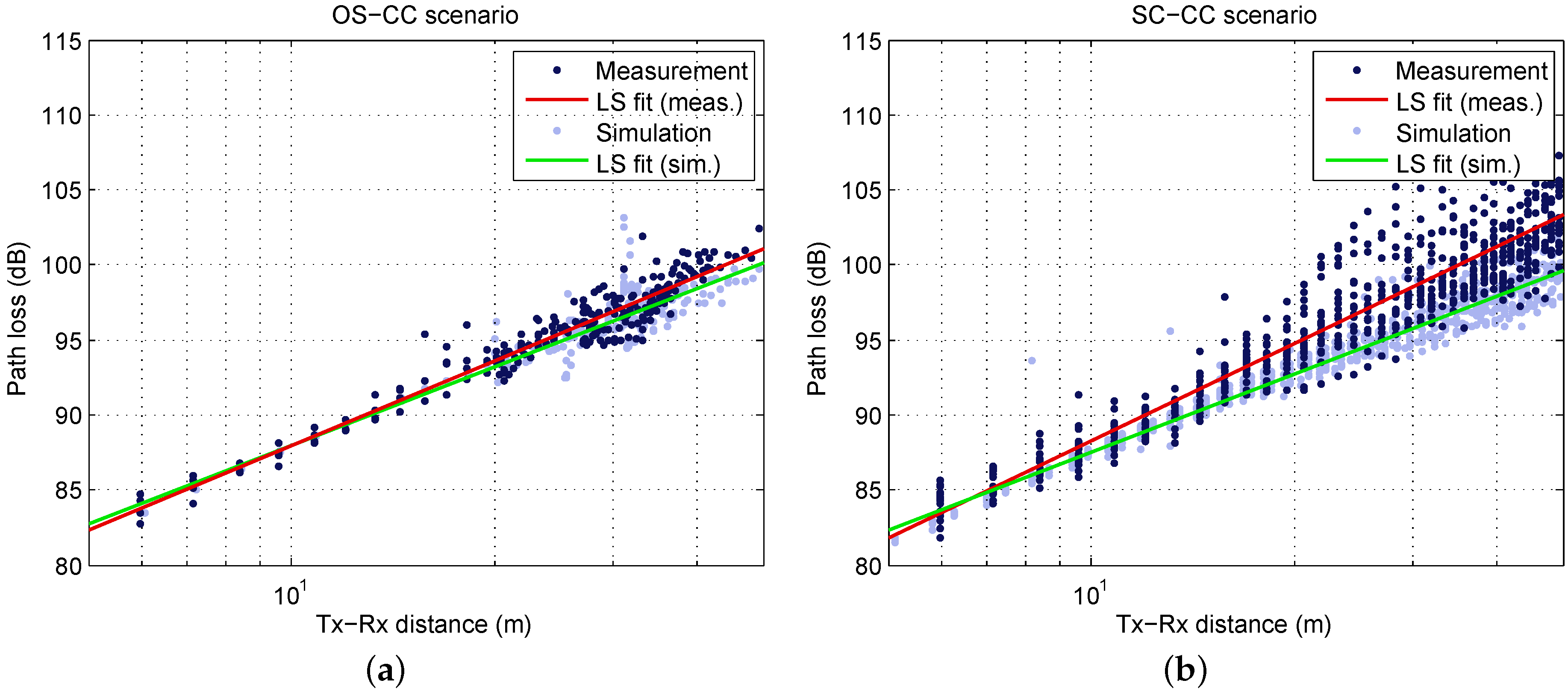
4.2. Path Loss
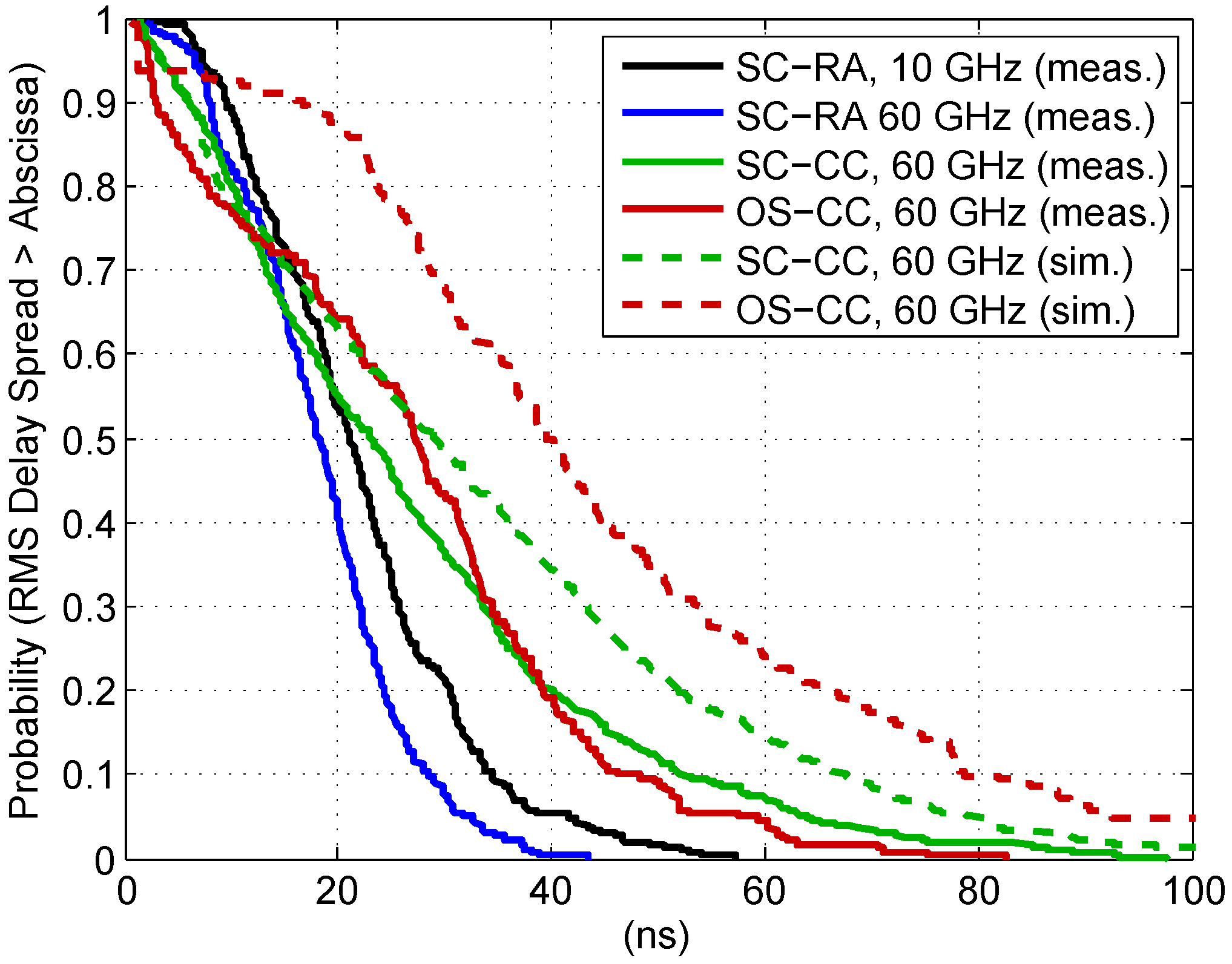
4.3. Delay Spread Statistics
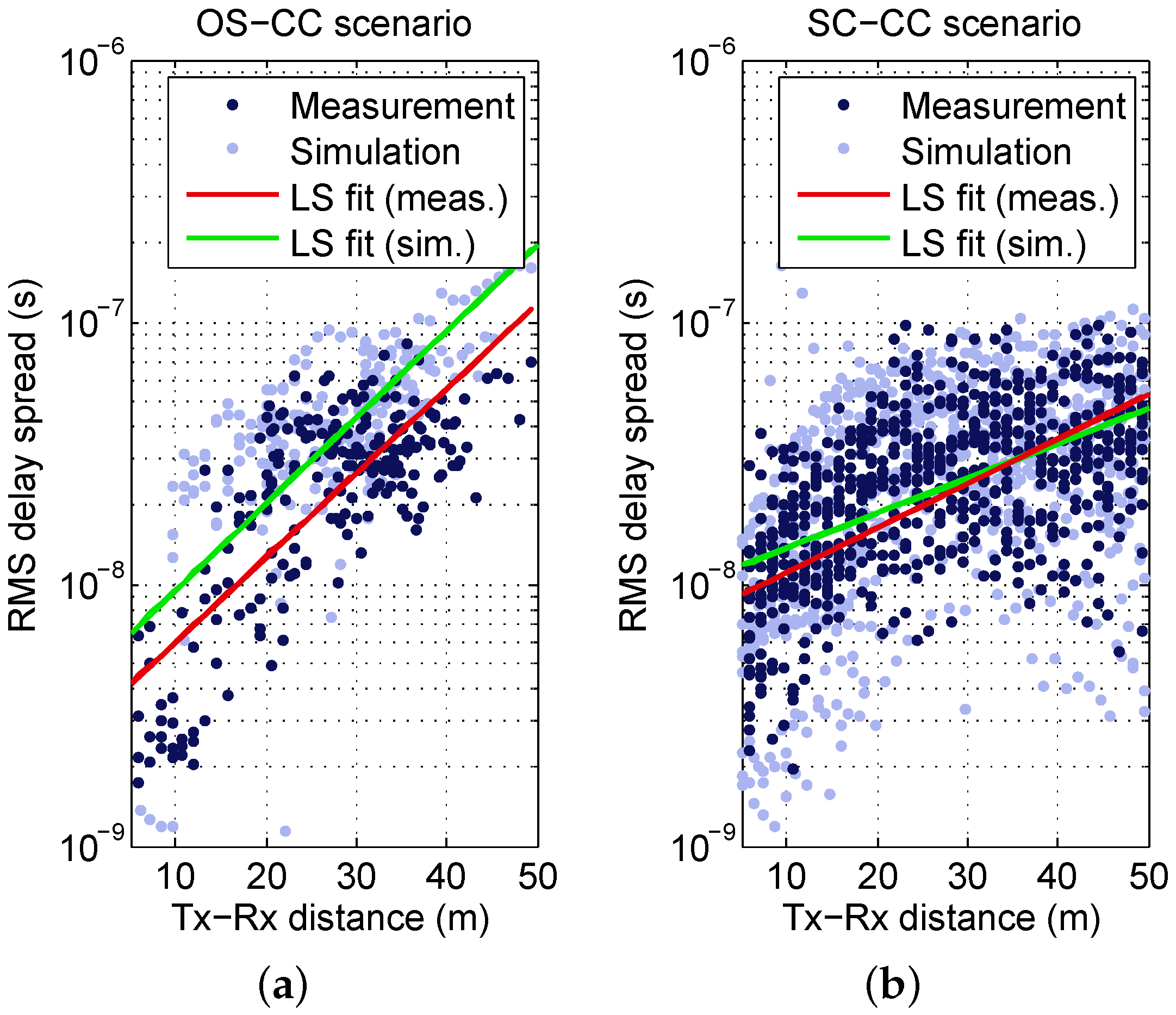
4.4. Distance Dependence of the Delay Spread
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| 3D | three-dimensional |
| 3GPP | 3rd Generation Partnership Project |
| 5G | fifth generation |
| APDP | averaged power delay profile |
| CCDF | complementary cumulative distribution function |
| CIR | channel impulse response |
| deg | angular degree |
| DS | delay spread |
| FPGA | field-programmable gate array |
| GO | geometrical optics |
| GPU | graphics processing unit |
| GSCM | geometry-based stochastic channel model |
| HIRATE | High Performance Digital Radio Testbed |
| HPBW | half-power beamwidth |
| IF | intermediate frequency |
| IP | intercept point |
| ITU-R | International Telecommunication Union Radiocommunication Sector |
| LOS | line-of-sight |
| LS | least-squares |
| METIS | Mobile and Wireless Communications Enablers for the Twenty-twenty Information Society |
| MiWEBA | Millimetre-Wave Evolution for Backhaul and Access |
| mm-wave | millimeter-wave |
| MPC | multipath component |
| NLOS | non-line-of-sight |
| omni | omnidirectional |
| OS-CC | open square, city center |
| PL | path loss |
| pol. | polarization |
| RMS | root mean square |
| RT | ray tracing |
| RX | receiver |
| SC-CC | street canyon, city center |
| SC-RA | street canyon, residential area |
| TX | transmitter |
| UMi | urban microcellular |
| UTD | uniform theory of diffraction |
References
- Boccardi, F.; Heath, R.; Lozano, A.; Marzetta, T.; Popovski, P. Five disruptive technology directions for 5G. IEEE Commun. Mag. 2014, 52, 74–80. [Google Scholar] [CrossRef]
- International Telecommunication Union Radiocommunication Sector (ITU-R). Future Spectrum Requirements Estimate for Terrestrial IMT. Report ITU-R M.2290-0. December 2013. Available online: http://www.itu.int/pub/R-REP-M.2290-2014 (accessed on 18 August 2016).
- Ai, B.; Guan, K.; Rupp, M.; Kurner, T.; Cheng, X.; Yin, X.F.; Wang, Q.; Ma, G.Y.; Li, Y.; Xiong, L.; et al. Future railway services-oriented mobile communications network. IEEE Commun. Mag. 2015, 53, 78–85. [Google Scholar] [CrossRef]
- ICT-671650 mmMAGIC Project. Use Case Characterization, KPIs and Preferred Suitable Frequency Ranges for Future 5G Systems between 6 GHz and 100 GHz. Deliverable D1.1. November 2015. Available online: https://5g-mmmagic.eu/results/ (accessed on 18 August 2016).
- Rangan, S.; Rappaport, T.S.; Erkip, E. Millimeter-wave cellular wireless networks: Potentials and challenges. Proc. IEEE 2014, 102, 366–385. [Google Scholar] [CrossRef]
- Sakaguchi, K.; Tran, G.; Shimodaira, H.; Nanba, S.; Sakurai, T.; Takinami, K.; Siaud, I.; Strinati, E.; Capone, A.; Karls, I.; et al. Millimeter-wave evolution for 5G cellular networks. IEICE Trans. Commun. 2015, E98-B, 388–402. [Google Scholar] [CrossRef]
- International Telecommunication Union Radiocommunication Sector (ITU-R). Technical Feasibility of IMT in Bands above 6 GHz. Report ITU-R M.2376. July 2015. Available online: http://www.itu.int/pub/R-REP-M.2376-2015 (accessed on 18 August 2016).
- International Telecommunication Union Radiocommunication Sector (ITU-R). Framework and Overall Objectives of the Future Development of IMT for 2020 and Beyond. Recommendation ITU-R M.2083-0. September 2015. Available online: http://www.itu.int/rec/R-REC-M.2083-0-201509-I (accessed on 18 August 2016).
- 3rd Generation Partnership Project (3GPP). Scenarios and Requirements for Next Generation Access Technologies. Technical Report 3GPP TR 38.913 V0.2.0. February 2016. Available online: http://www.3gpp.org/ftp/Specs/archive/38_series/38.913/38913-020.zip (accessed on 18 August 2016).
- 3rd Generation Partnership Project (3GPP). Study on 3D Channel Model for LTE (Release 12). Technical Report 3GPP TR 36.873 V12.2.0. July 2015. Available online: http://www.3gpp.org/ftp/Specs/archive/36_series/36.873/36873-c20.zip (accessed on 18 August 2016).
- ICT-671650 mmMAGIC Project. Measurement Campaigns and Initial Channel Models for Preferred Suitable Frequency Ranges. Deliverable D2.1. March 2016. Available online: https://5g-mmmagic.eu/results/ (accessed on 18 August 2016).
- Aalto University; BUPT; CMCC; Nokia; NTT DOCOMO; New York University; Ericsson; Qualcomm; Huawei; Samsung; Intel; University of Bristol; KT Corporation; University of Southern California. 5G Channel Model for Bands up to 100 GHz. 5GCM White Paper. March 2016. Available online: http://www.5gworkshops.com/5GCM.html (accessed on 18 August 2016).
- ICT-317669 METIS Project. METIS Channel Models, Deliverable D1.4, Version 3; July 2020. Available online: https://www.metis2020.com/documents/deliverables/ (accessed on 18 August 2016).
- Jaeckel, S.; Raschkowski, L.; Borner, K.; Thiele, L. QuaDRiGa: A 3-D multi-cell channel model with time evolution for enabling virtual field trials. IEEE Trans. Antennas Propag. 2014, 62, 3242–3256. [Google Scholar] [CrossRef]
- Ai, B.; Cheng, X.; Kürner, T.; Zhong, Z.D.; Guan, K.; He, R.S.; Xiong, L.; Matolak, D.W.; Michelson, D.G.; Briso-Rodriguez, C. Challenges toward wireless communications for high-speed railway. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2143–2158. [Google Scholar] [CrossRef]
- Peter, M.; Keusgen, W.; Weiler, R.J. On path loss measurement and modeling for millimeter-wave 5G. In Proceedings of the 9th European Conference on Antennas and Propagation (EuCAP 2015), Lisbon, Portugal, 12–17 April 2015; pp. 1–5.
- Kim, M.; Takada, J.I.; Chang, Y.; Shen, J.; Oda, Y. Large scale characteristics of urban cellular wideband channels at 11 GHz. In Proceedings of the 9th European Conference on Antennas and Propagation (EuCAP 2015), Lisbon, Portugal, 12–17 April 2015; pp. 1–4.
- Rappaport, T.S.; MacCartney, G.R.; Samimi, M.K.; Sun, S. Wideband millimeter-wave propagation measurements and channel models for future wireless communication system design. IEEE Trans. Commun. 2015, 63, 3029–3056. [Google Scholar] [CrossRef]
- Hur, S.; Cho, Y.J.; Kim, T.; Park, J.; Molisch, A.F.; Haneda, K.; Peter, M. Wideband spatial channel model in an urban cellular environments at 28 GHz. In Proceedings of the 9th European Conference on Antennas and Propagation (EuCAP 2015), Lisbon, Portugal, 12–17 April 2015; pp. 1–5.
- MacCartney, G.R.; Zhang, J.; Nie, S.; Rappaport, T.S. Path loss models for 5G millimeter wave propagation channels in urban microcells. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 3948–3953.
- Ben-Dor, E.; Rappaport, T.S.; Qiao, Y.; Lauffenburger, S.J. Millimeter-wave 60 GHz outdoor and vehicle AOA propagation measurements using a broadband channel sounder. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM), Houston, TX, USA, 5–9 December 2011; pp. 1–6.
- Hur, S.; Baek, S.; Kim, B.; Chang, Y.; Molisch, A.F.; Rappaport, T.S.; Haneda, K.; Park, J. Proposal on millimeter-wave channel modeling for 5G cellular system. IEEE J. Sel. Top. Signal Process. 2016, 10, 454–469. [Google Scholar] [CrossRef]
- Oestges, C.; Hennaux, G.; Gueuning, Q. Centimeter- and millimeter-wave channel modeling using ray-tracing for 5G communications. In Proceedings of the IEEE 82nd Vehicular Technology Conference (VTC2015-Fall), Boston, MA, USA, 6–9 September 2015; pp. 1–5.
- Weiler, R.J.; Peter, M.; Keusgen, W.; Wisotzki, M. Measuring the busy urban 60 GHz outdoor access radio channel. In Proceedings of the IEEE International Conference on Ultra-Wideband (ICUWB), Paris, France, 1–3 September 2014; pp. 166–170.
- Weiler, R.J.; Peter, M.; Kühne, T.; Wisotzki, M.; Keusgen, W. Simultaneous millimeter-wave multi-band channel sounding in an urban access scenario. In Proceedings of the 9th European Conference on Antennas and Propagation (EuCAP 2015), Lisbon, Portugal, 12–17 April 2015; pp. 1–5.
- Keusgen, W.; Kortke, A.; Peter, M.; Weiler, R.J. A highly flexible digital radio testbed and 60 GHz application examples. In Proceedings of the 43rd European Microwave Conference (EuMC 2013), Nuremberg, Germany, 6–11 October 2013; pp. 740–743.
- Felbecker, R.; Raschkowski, L.; Keusgen, W.; Peter, M. Electromagnetic wave propagation in the millimeter wave band using the NVIDIA OptiX GPU ray tracing engine. In Proceedings of the 6th European Conference on Antennas and Propagation (EuCAP 2012), Prague, Czech Republic, 26–30 March 2012; pp. 488–492.
- Göktepe, B.; Peter, M.; Weiler, R.J.; Keusgen, W. The influence of street furniture and tree trunks in urban scenarios on ray tracing simulations in the millimeter wave band. In Proceedings of the 46th European Microwave Conference (EuMC 2015), Paris, France, 3–7 September 2015; pp. 195–198.
- Cuinas, I.; Pugliese, J.P.; Hammoudeh, A.; Sanchez, M. Comparison of the electromagnetic properties of building materials at 5.8 GHz and 62.4 GHz. In Proceedings of the IEEE 52nd Vehicular Technology Conference (VTC2000-Fall), Boston, MA, USA, 24–28 September 2000; Volume 2, pp. 780–785.
- Correia, L.M.; Frances, P.O. Estimation of materials characteristics from power measurements at 60 GHz. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), The Hague, The Netherlands, 18–23 September 1994; Volume 2, pp. 510–513.
- Feuerstein, M.; Blackard, K.; Rappaport, T.; Seidel, S.; Xia, H. Path loss, delay spread, and outage models as functions of antenna height for microcellular system design. IEEE Trans. Veh. Technol. 1994, 43, 487–498. [Google Scholar] [CrossRef]
- International Telecommunication Union Radiocommunication Sector (ITU-R). Propagation Data and Prediction Methods for the Planning of Short-Range Outdoor Radiocommunication Systems and Radio Local Area Networks in the Frequency Range 300 MHz to 100 GHz. Recommendation ITU-R P.1411-8. July 2015. Available online: https://www.itu.int/rec/R-REC-P.1411-8-201507-I/en (accessed on 18 August 2016).
- International Telecommunication Union Radiocommunication Sector (ITU-R). Multipath Propagation and Parameterization of Its Characteristics. Recommendation ITU-R P.1407-5. September 2013. Available online: https://www.itu.int/rec/R-REC-P.1407-5-201309-I/en (accessed on 18 August 2016).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | OS-CC | SC-CC [24] | SC-RA [25] |
|---|---|---|---|
| Site | Berlin city center, | Berlin city center, | Berlin residential area |
| Leipziger Platz | Potsdamer Str. | Kreuzberg | |
| Dimensions | Square diameter: ≈150 m | Street canyon width: ≈52 m | Street canyon width: 15–20 m |
| Frequency | 60.0 GHz | 60.0 GHz | 60.4 GHz and 10.0 GHz |
| Bandwidth | 250 MHz | 250 MHz | 250 MHz |
| Antenna type (TX and RX) | omni, vertical pol. | omni, vertical pol. | omni, vertical pol. |
| HPBW in elevation | ≈80 deg | ≈80 deg | ≈80 deg at 60.4 GHz, |
| ≈60 deg at 10.0 GHz | |||
| Antenna height (TX/RX) | 3.5 m/1.5 m | 3.5 m/1.5 m | 5.0/1.5 m |
| Conditions | mainly LOS | mainly LOS | LOS/NLOS |
| Distance | 2–50 m | 2–50 m | 4–210 m |
| Spacing between meas. | 0.4 mm | 0.4 mm | 0.4 mm |
| points for mobile RX | |||
| Number of collected CIRs | 2.4 million | 6.4 million | 6.3 million |
| Scenario | Freq. (GHz) | Conditions | Measurement | Simulation | Valid. Range (m) | ||||
|---|---|---|---|---|---|---|---|---|---|
| n (dB) | σ (dB) | (dB) | n | σ (dB) | |||||
| OS-CC | 60.0 | LOS | 69.2 | 1.88 | 1.03 | 69.2 | 1.74 | 1.17 | 5–50 |
| SC-CC | 60.0 | LOS | 67.0 | 2.13 | 2.03 | 69.2 | 1.72 | 0.97 | 5–50 |
| SC-RA | 60.4 | LOS | 67.0 | 2.07 | 2.53 | - | - | - | 10–210 |
| NLOS | 69.7 | 2.67 | 4.93 | - | - | - | 10–80 | ||
| 10.0 | LOS | 57.7 | 1.62 | 2.95 | - | - | - | 10–210 | |
| NLOS | 61.7 | 2.10 | 7.36 | - | - | - | 10–80 | ||
| Scenario | Frequency (GHz) | Conditions | (ns) | (ns) | (ns) | (ns) |
|---|---|---|---|---|---|---|
| OS-CC | 60.0 | LOS | 26.5 | 27.3 | 16.9 | 59.5 |
| SC-CC | 60.0 | LOS | 26.6 | 23.2 | 19.1 | 63.9 |
| SC-RA | 60.4 | LOS | 18.3 | 18.2 | 7.84 | 32.5 |
| NLOS | 20.9 | 15.9 | 13.4 | 43.8 | ||
| 10.0 | LOS | 21.9 | 21.1 | 10.2 | 42.2 | |
| NLOS | 37.7 | 38.2 | 17.4 | 67.9 |
| Scenario | Freq. (GHz) | Measurement | Simulation | Valid. Range (m) | ||||
|---|---|---|---|---|---|---|---|---|
| α | β | ϵ | α | β | ϵ | |||
| OS-CC | 60.0 | −8.54 | 0.0322 | 0.262 | −8.35 | 0.0329 | 0.306 | 5–50 |
| SC-CC | 60.0 | −8.13 | 0.0170 | 0.287 | −8.06 | 0.0135 | 0.371 | 5–50 |
| SC-RA | 60.4 | −8.05 | 0.0055 | 0.185 | - | - | - | 5–50 |
| 10.0 | −7.84 | 0.0024 | 0.216 | - | - | - | 5–50 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peter, M.; Weiler, R.J.; Göktepe, B.; Keusgen, W.; Sakaguchi, K. Channel Measurement and Modeling for 5G Urban Microcellular Scenarios. Sensors 2016, 16, 1330. https://doi.org/10.3390/s16081330
Peter M, Weiler RJ, Göktepe B, Keusgen W, Sakaguchi K. Channel Measurement and Modeling for 5G Urban Microcellular Scenarios. Sensors. 2016; 16(8):1330. https://doi.org/10.3390/s16081330
Chicago/Turabian StylePeter, Michael, Richard J. Weiler, Barış Göktepe, Wilhelm Keusgen, and Kei Sakaguchi. 2016. "Channel Measurement and Modeling for 5G Urban Microcellular Scenarios" Sensors 16, no. 8: 1330. https://doi.org/10.3390/s16081330